Перекрестная ссылка на родственные заявки
Настоящая заявка притязает на преимущество и приоритет предварительной патентной заявки США №61/254,451, поданной 23 октября 2009 года под названием БУКСИРУЕМЫЙ УЗЕЛ ДЛЯ ВОЗДУШНОГО СУДНА С НЕПОДВИЖНЫМ КРЫЛОМ ДЛЯ ГЕОФИЗИЧЕСКОЙ СЪЕМКИ.
Содержание вышеупомянутой патентной заявки настоящим четко включено в настоящее подробное описание путем ссылки.
Область техники
Настоящее описание относится к системе буксируемого узла катушки приемника, предназначенной для использования с воздушным судном с неподвижным крылом для геофизической съемки.
Предпосылки создания изобретения
Способы геофизической электромагнитной (ЭМ) разведки могут эффективно определять электропроводность грунтов, скальных пород и других тел на и под земной поверхностью.
Геофизическая ЭМ-разведка может быть осуществлена с использованием наземного оборудования и бортового оборудования. Бортовые способы, в которых оборудование транспортируется воздушным судном, таким как вертолет, самолет или дирижабль, может использоваться для съемки на больших площадях. При бортовых электромагнитных (БЭМ) системах данные съемки можно получать пока самолет или вертолет летит с почти постоянной скоростью вдоль почти параллельных линий и близко к отстоящим на равные расстояния линиям приблизительно на постоянной высоте над землей.
Некоторые способы геофизической съемки являются активными из-за того, что оборудование используется для передачи сигнала в целевую область, и затем измеряется отклик на переданный сигнал. Другие способы геофизической съемки являются пассивными из-за того, что сигналы, подаваемые из целевой области, измеряются без первоначальной передачи сигнала в эту целевую область. Примером пассивного способа геофизической ЭМ-разведки является магнитная съемка на звуковой частоте (АФМАГ), при которой измеряют ЭМ-поля от встречающихся в естественных условиях первичных источников сигнала, таких как разряды молний. Эти ЭМ-поля распространяются вокруг земли как плоские волны, направляемые ионосферой и земной поверхностью. Активность молний, происходящая на удалении отточки измерения, может создавать сигналы почти с плоской спектральной плотностью на частотах в диапазоне, например, от 8 Гц до 500 Гц, которые изменяются в зависимости от географического места, времени суток, сезона и погодных условий. Пример пассивного способа геофизической ЭМ-разведки АФМАГ приведен в патенте США №6,876,202.
Желателен буксируемый узел, который можно будет эффективно использовать в сочетании с воздушным судном с неподвижным крылом.
Раскрытие
Согласно одному примеру варианта осуществления, предложена система буксируемого узла для бортовой геофизической электромагнитной (ЭМ) съемки для использования с воздушным судном с неподвижным крылом. Система включает: узел катушки приемника, имеющий в сущности жесткую трубчатую раму катушки приемника, формирующую непрерывный внутренний канал, который проходит вокруг центральной открытой области, и катушка приемника размещена в этом внутреннем канале; систему лебедки для прикрепления к воздушному судну с неподвижным крылом, причем система лебедки имеет буксирный трос, прикрепленный к узлу катушки приемника, и выполнена так, чтобы разматывать буксирный трос для подвешивания узла катушки приемника с воздушного судна с неподвижным крылом с катушкой приемника в номинально горизонтальной ориентации во время съемки и чтобы наматывать буксирный трос для перевода узла катушки приемника во втянутое положение на нижней стороне воздушного судна с неподвижным крылом при взлете и посадке; и систему защелок для установки на нижнюю сторону воздушного судна, имеющую раскрываемые запорные элементы, входящие в зацепление с узлом катушки приемника, когда узел катушки приемника находится в втянутом положении.
Согласно еще одному примеру варианта осуществления, предложена система для бортовой геофизической электромагнитной (ЭМ) съемки, которая включает: воздушное судно с неподвижным крылом; узел катушки приемника, включающий в сущности жесткую трубчатую раму катушки приемника, формирующую непрерывный внутренний канал, который проходит вокруг центральной открытой области, в которой воздух может проходить через раму катушки приемника, при этом катушка приемника расположена во внутреннем канале, и удлиненный опорный элемент, проходящий через центральную открытую область между разнесенными частями рамы катушки приемника; систему лебедки, прикрепленную к воздушному судну с неподвижным крылом, причем система лебедки имеет буксирный трос, прикрепленный к узлу катушки приемника, и выполнена так, чтобы разматывать буксирный трос для подвешивания узла катушки приемника с воздушного судна с неподвижным крылом с катушкой приемника в номинально горизонтальной ориентации во время съемки и чтобы наматывать буксирный трос для перевода узла катушки приемника во втянутое положение на нижней стороне воздушного судна с неподвижным крылом при взлете и посадке; систему защелок для установки на нижнюю сторону воздушного судна, имеющую раскрываемые запорные элементы для зацепления удлиненного опорного элемента, когда узел катушки приемника находится в втянутом положении; и оборудование для обработки сигнала в связи с катушкой приемника для приема от нее сигналов, представляющих ЭМ-поля, созданные местностью, на которой ведется съемка как реакция на электрические события, встречающиеся в естественных условиях.
Согласно еще одному примеру варианта осуществления, предложен способ выполнения бортовой геофизической съемки с использованием воздушного судна с неподвижным крылом. Этот способ включает: предоставление узла катушки приемника, включающего в сущности жесткую трубчатую раму катушки приемника, формирующую непрерывный внутренний канал, который проходит вокруг центральной открытой области, в которой воздух может проходить через раму катушки приемника, при этом катушка приемника расположена во внутреннем канале; оснащение воздушного судна с неподвижным крылом системой лебедки, имеющей буксирный трос, прикрепленный к узлу катушки приемника, и выполненной так, чтобы разматывать буксирный трос для подвешивания узла катушки приемника с воздушного судна с неподвижным крылом и чтобы наматывать буксирный трос для перевода узла катушки приемника во втянутое положение на нижней стороне воздушного судна с неподвижным крылом при взлете и посадке; оснащение системой защелок нижней стороны воздушного судна с неподвижным крылом, имеющего раскрываемые запорные элементы, чтобы входить в зацепление с удлиненным опорным элементом, когда узел катушки приемника находится в втянутом положении; и разматывать буксирный трос во время полета воздушного судна с неподвижным крылом для подвешивания рамы катушки приемника в номинально горизонтальном положении и приема сигналов с катушки приемника.
Краткое описание чертежей
Примеры вариантов осуществления приведены в нижеследующем описании. В описании сделаны ссылки на прилагаемые чертежи, на которых:
Фиг.1 - перспективный вид системы буксируемого узла для бортовой геофизической электромагнитной (ЭМ) съемки, включающей узел катушки приемника, подвешенный на буксирно-запорном узле, который прикреплен к воздушному судну с неподвижным крылом, согласно примерам вариантов осуществления.
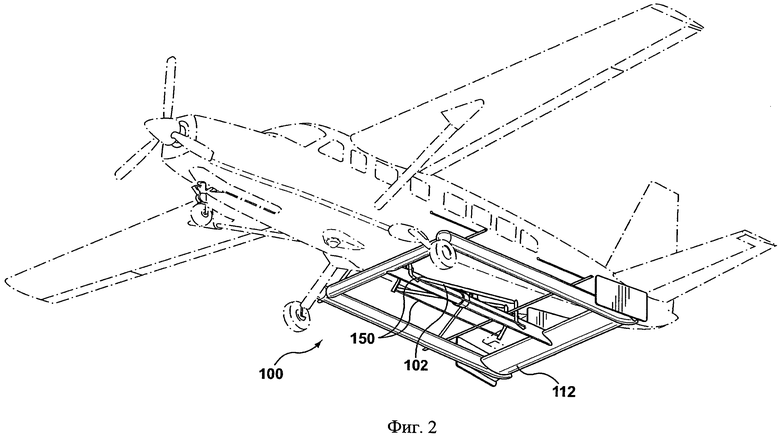
Фиг.2 - перспективный вид системы буксируемого узла для бортовой геофизической съемки с Фиг.1, где узел катушки приемника расположен в буксирно-запорном узле, который прикреплен к воздушному судну с неподвижным крылом.
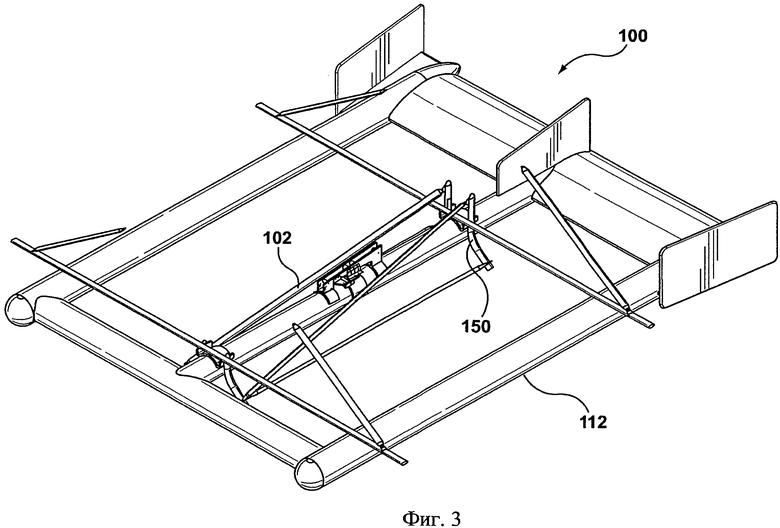
Фиг.3 - перспективный вид системы буксируемого узла для бортовой геофизической съемки с Фиг.1, где узел катушки приемника расположен в буксирно-запорном узле.
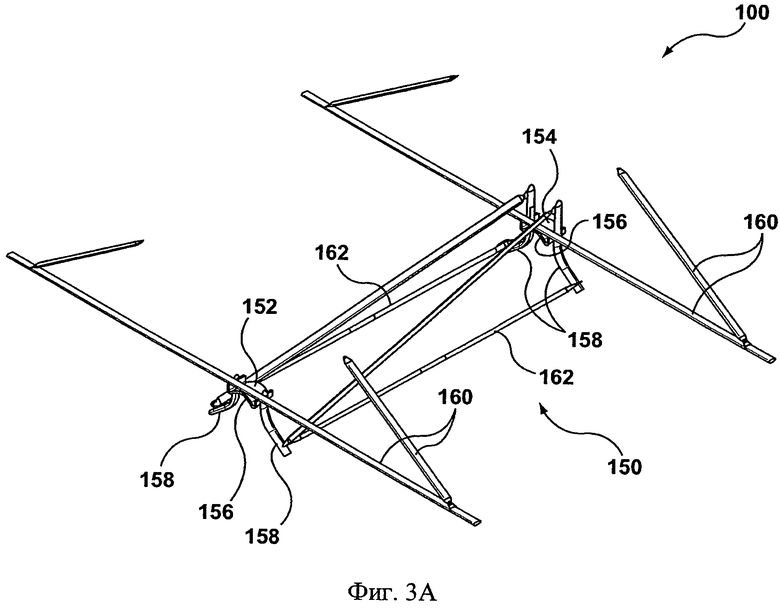
Фиг.3А - перспективный вид системы защелок буксирно-запорного узла системы буксируемого узла для бортовой геофизической съемки с Фиг.1.
Фиг.4 - перспективный вид буксируемого узла системы узла катушки приемника для бортовой геофизической съемки с Фиг.1.
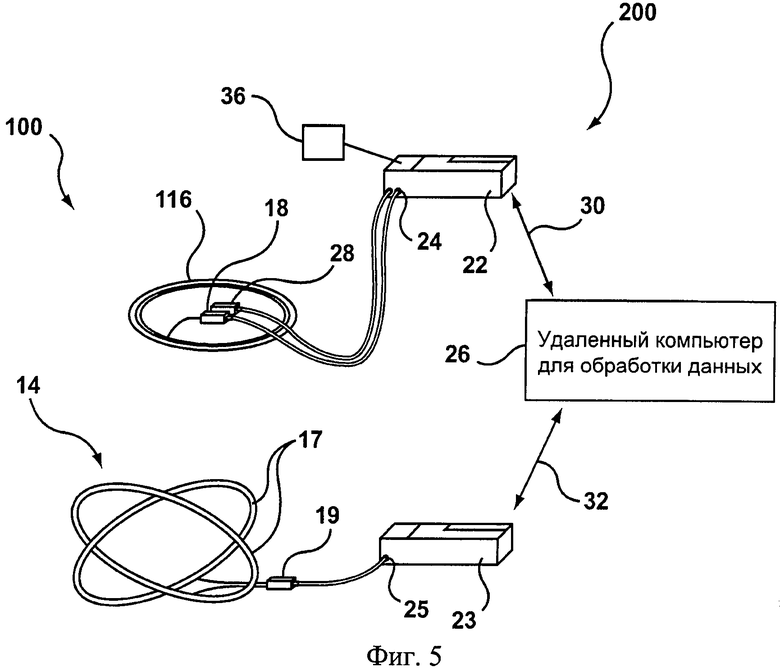
Фиг.5 - изображение системы геофизической разведки АФМАГ, которая включает систему буксируемого узла для бортовой геофизической съемки с Фиг.1, согласно одному примеру варианта осуществления изобретения.
Фиг.6 - вид в разрезе одного из боковых элементов узла катушки приемника, взятый по линиям VI-VI с Фиг.4, согласно одному примеру варианта осуществления.
Фиг.7 - вид в разрезе одного из боковых элементов узла катушки приемника, взятый по линиям VII-VII с Фиг.6.
Фиг.8 - вид в разрезе одного из боковых элементов узла катушки приемника, взятый по линиям VI-VI с Фиг.4, согласно еще одному примеру варианта осуществления.
Фиг.9 - вид в разрезе одного из боковых элементов узла катушки приемника, взятый по линиям Х-Х с Фиг.8.
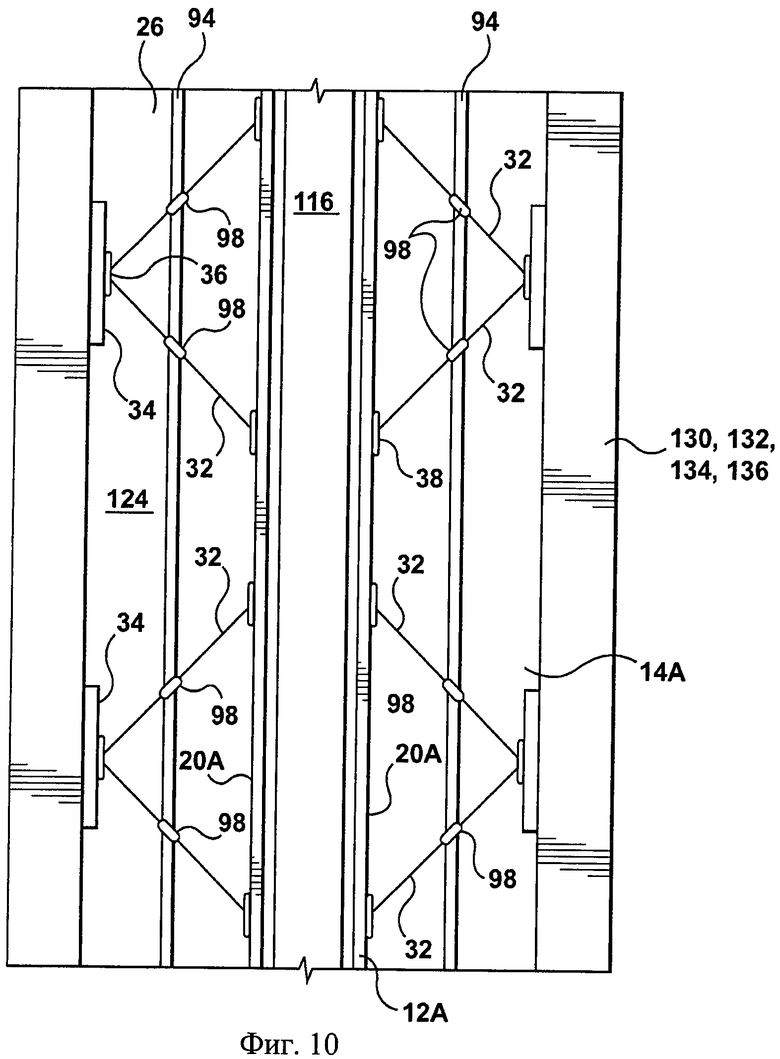
Фиг.10 - вид в разрезе одного из боковых элементов узла катушки приемника согласно еще одному примеру варианта осуществления.
Описание примеров вариантов осуществления
На Фиг.1 и 2 показана система буксируемого узла для бортовой геофизической электромагнитной (ЭМ) съемки 100, которая включает узел катушки приемника 112 и буксирно-запорный узел 102, согласно примерам вариантов осуществления изобретения. Буксирно-запорный узел 102 прикреплен к нижней стороне воздушного судна с неподвижным крылом 104 и включает систему лебедки 105 с намотанным буксирным тросом 110 для подвешивания и втягивания узла катушки приемника 112. Система лебедки 105 может, например, включать гидравлическую лебедку, которая расположена в корпусе воздушного судна, с буксирным тросом 110, проходящим через отверстие 106 в корпусе воздушного судна. Узел катушки приемника 112 показан подвешенным на буксирном тросе 110 от буксирно-запорного узла 102 в положении, показанном на Фиг.1. В частности, на Фиг.1 узел катушки приемника 112 показан с буксирным тросом 110 в частично размотанном или частично намотанном положении, когда узел катушки приемника 112 отходит от воздушного судна или втягивается обратно. Узел катушки приемника 112 может, как неограничивающий пример, быть подвешен на расстоянии приблизительно 100 метров (или больше, или меньше) для геофизической съемки в полете. На Фиг.2 показан узел катушки приемника 112 в втянутом положении, закрепленным буксирно-запорным узлом 102 на нижней стороне воздушного судна 104. Обычно узел катушки приемника 112 будет содержаться в втянутом положении, когда съемку не проводят - например, при полете в место съемки или из него и во время взлета и посадки. Подвешивание узла катушки приемника 112, как показано на Фиг.1, во время геофизической съемки снижает шум, вызываемый буксирующим воздушным судном 104.
Со ссылкой на Фиг.1 и 4, узел катушки приемника 112 включает в сущности жесткую аэродинамическую трубчатую раму катушки приемника 120, которая определяет прямоугольный внутренний канал 124, в котором размещен многовитковый контур или катушка 116 приемника (показана пунктирными линиями). Как можно понять из чертежей, рама катушки приемника 120 образует петлю, так что внутренний канал 124 является непрерывным замкнутым контуром. В показанном варианте осуществления, рама катушки приемника 120 имеет в сущности прямоугольную форму, которая определяет периметр центральной открытой области или отверстия 122. Внутренний канал 124 проходит вокруг центральной открытой области 122, и воздух может проходить через центральную открытую область 122. Прямоугольная рама катушки приемника 120 образована парой параллельных боковых элементов трубчатой рамы 130, 132, соединенных между собой передним и задним параллельными элементами трубчатой рамы 134, 136. В показанном варианте осуществления боковые элементы трубчатой рамы 130, 132 имеют большую длину, чем передний и задний параллельные элементы трубчатой рамы 134, 136, и вертикальные стабилизаторы 140 расположены рядом с задним концом прямоугольной рамы катушки приемника 120 и помогают удерживать раму ориентированном в постоянном направлении во время полета с катушкой приемника 120 в номинально горизонтальной ориентации с ее вертикально ориентированной осью.
В одном примере варианта осуществления, центральная стрела в форме удлиненного опорного элемента 142 проходит от переднего элемента трубчатой рамы 134 к заднему элементу трубчатой рамы 136 через середину центрального отверстия 122, как показано в этом варианте осуществления, этот центральный опорный элемент 142 может быть расположен в сущности между и параллельно боковым элементам трубчатой рамы 130, 132 и включает центральный фиксатор 144 буксирного троса, к которому подсоединен буксирный трос 110. Каждый из элементов трубчатой рамы 130, 132, 134 и 136 и опорный элемент 142 может иметь такую форму, чтобы придать буксируемому узлу 112 катушки приемника такую форму, которая снижает сопротивление потоку воздуха и поддерживает буксируемый узел в постоянной ориентации при буксировке. В этом отношении элементы трубчатой рамы могут иметь обтекаемую форму относительно их соответственной ориентации в раме катушки приемника - например, задний элемент трубчатой рамы 136 может иметь плоскую крыловидную конфигурацию. Элементы трубчатой рамы 130, 132, 134 и 136 и опорный элемент 142 могут быть выполнены, в сущности, из материалов, которые являются электроизолирующими и немагнитными, например, из стекловолокна.
Со ссылкой на Фиг.1-3А, буксирно-запорный узел 102 включает систему механических или гидравлических защелок 150. Как лучше всего видно на Фиг.3А, в показанном варианте осуществления система защелок 150 включает разнесенные передние и задние запорные элементы 152, 154 для надежного зацепления центрального опорного элемента 142 узла катушки приемника 112, когда узел катушки приемника находится в его втянутом, зафиксированном положении под воздушным судном 104. Каждый из передних и задних запорных элементов 152, 154 включает соответственную пару противоположных, шарнирно смонтированных запорных рычагов 158 для зацепления противоположных сторон наружной поверхности центрального опорного элемента 142 и верхний параболический элемент 156 для зацепления верхней поверхности центрального опорного элемента 142. Запорные рычаги 158 могут иметь расходящиеся нижние концы, чтобы выступать в качестве направляющей для центрального опорного элемента 142, когда узел катушки приемника перемещается в его втянутое положение или из него. В показанном варианте осуществления соединительные тяги 162 могут использоваться для механической связи запорных рычагов 158, чтобы передние и задние запорные элементы 152, 154 работали синхронно. Система защелок 150 включает систему стойки 160 для крепления ее к воздушному судну 104. Для крепления узла катушки приемника 112 к воздушному судну можно использовать альтернативные конфигурации системы защелок, и вышеописанная система защелок является только одним примером.
Снова возвращаясь к раме катушки приемника 120, в одном примере варианта осуществления рама выполнена так, что она может быть разделена в горизонтальной плоскости, чтобы позволить вводить, обслуживать и удалять катушку приемника 136 из прямоугольного внутреннего канала 124 для катушки. По меньшей мере в некоторых примерах вариантов осуществления для крепления катушки приемника 116 в прямоугольном внутреннем канале 124 для катушки используется система упругой подвески, и в этом отношении на Фиг.6-10 показаны три разные возможные системы подвески катушки приемника.
Система одиночной подвески катушки приемника показана на Фиг.6 и 7. Такая система включает прямоугольный элемент внутренней рамы 12А, упруго подвешенный в центра канала 124 катушки с помощью нескольких крепежных узлов 40, которые разнесены внутри по длине каждого из элементов трубчатой рамы 130, 132, 134 и 136 (хотя показанные на Фиг.6 как имеющие круглое поперечное сечение, такие элементы могут иметь другие формы поперечного сечения, как можно понять из предыдущих чертежей). Прямоугольный элемент внутренней рамы 12А может быть жестким желобом с открытым верхом, в котором закреплена катушка приемника. Каждый крепежный узел 40 включает упругий элемент подвески 32, который проходит между внутренней стенкой элемента трубчатой рамы 130, 132, 134 и 136 и элементом внутренней рамы 12А. В одном примере варианта осуществления каждый упругий элемент подвески 32 (который может быть выполнен, например, из резины) прикреплен на противоположных первом и втором концах 38 к разнесенным по длине местам на стороне элемента внутренней рамы 12А и приблизительно в средней точке 36 к внутренней стенке элемента трубчатой рамы 130, 132, 134 и 136 так, что упругий элемент подвески 32 образует V-образную форму, которая прилагает противоположно направленные продольные силы, а также поперечную силу, к элементу внутренней рамы 12А (Следует понимать, что упругий элемент V-образной формы можно заменить двумя отдельными упругими деталями). Крепежный блок 34 может быть прикреплен клеем или другим крепежным средством к внутренней стенке элемента трубчатой рамы 130, 132, 134 и 136, чтобы обеспечить поверхность для крепления средней точки 36 болтом или другим крепежным средством. В показанном варианте осуществления крепежные узлы 40 расположены парами на противоположных сторонах секции внутренней рамы 12А, так что в сущности равные, но противоположно направленные силы прилагаются к секции внутренней рамы 12А упругими элементами подвески 32, чтобы нормальное положение покоя секции внутренней рамы 12А находилось в центре канала для катушки 124, определяемого элементом трубчатой рамы 130, 132, 134 и 136. В одном примере варианта осуществления упругие элементы подвески 32 в разделенном элементе трубчатой рамы 130, 132, 134 и 136 прикреплены к его одной половине (например, нижней половине), чтобы облегчить крепление секции внутренней рамы 12А на ее месте перед тем, как закрыть канал катушки приемника 124 другой половиной.
Упругие элементы 32 могут быть выполнены из резины или другого подходящего упругого или пружинящего материала. Крепежный узел 40 может иметь многочисленные формы, отличающиеся от показанной на Фиг.6 и 7, чтобы упруго подвешивать элемент внутренней рамы 12А.
В некоторых вариантах осуществления элемент внутренней рамы 12А имеет V-образное поперечное сечение и определяет открытый лоток 42, который обеспечивает внутренний кабельный канал 44, в котором размещена катушка приемника 16А. В некоторых примерах вариантов осуществления элемент внутренней рамы 12А альтернативно может иметь полупрямоугольное, или полукруглое, или круглое, или другое поперечное сечение. По меньшей мере в некоторых вариантах осуществления катушка приемника 116 является контуром или многовитковой катушкой, которая закреплена в желобе 42 лентой и/или другим типом крепежного механизма.
Со ссылкой на Фиг.8 и 9, в еще одном альтернативном варианте осуществления используется система двойной подвески для подвешивания внутренней рамы 12А катушки приемника в элементах наружной трубчатой рамы 130, 132, 134 и 136 узла катушки приемника 112. Хотя показанные как имеющие цилиндрическое поперечное сечение элементы трубчатой рамы 130, 132, 134 и 136 могут иметь другие формы поперечного сечения, как показано на предыдущих чертежах. В системе двойной подвески с Фиг.8 и 9 узлы подвески 40, расположенные по длине каждого из элементов внутренней рамы 12А, соединены с элементами промежуточной рамы 74, которые, в свою очередь, подвешены на элементах наружной рамы 130, 132, 134 и 136. Например, первые упругие элементы подвески 32 противоположно подвешивают элемент внутренней рамы 12А в центре цилиндрической или полуцилиндрической секции промежуточной рамы 74, который затем подвешен по центру аналогичным образом другими упругими элементами 76, которые проходят между секцией промежуточной рамы 74 и элементом наружной рамы 130, 132, 134 или 136. Как можно видеть на Фиг.9, другие упругие элементы 76 также могут быть расположены по V-образной схеме, чтобы противодействовать продольному перемещению, а также радиальному перемещению аналогичным образом с первыми упругими элементами подвески 32. Как сказано выше, секция промежуточной рамы 74 может быть полуцилиндрической, что обеспечивает легкий доступ к внутреннему пространству секции рамы 74 во время сборки и ремонта.
Таким образом, в варианте осуществления с Фиг.8 и 9 секция внутренней рамы 20А, которая поддерживает катушку приемника 116, подвешена с помощью нескольких первых упругих элементов подвески 32 к нескольким соответственным секциям промежуточной рамы 74, которые, в свою очередь, подвешены с помощью одного или нескольких вторых упругих элементов подвески 76 (которые могут быть выполнены, например, из резины) на наружной раме 14А. Секция внутренней рамы 12А может быть также расположена в центре или рядом с центром канала 124. Области, которые расположены (i) рядом с соединениями между первыми элементами подвески 32 и каждой из секций внутренней рамы 12А и секций промежуточной рамы 74 и (ii) рядом с соединениями между вторыми элементами подвески 76 и каждой из секций промежуточной рамы 74 и элементами наружной рамы, могут быть покрыты агентом, снижающим трение, таким как силикон. Силиконовое покрытие может снижать шум, вызываемый трением в точке крепления или соединения. В некоторых примерах вариантов осуществления первые элементы подвески могут быть соединены с соответственными секциями рамы тросовыми растяжками, которые проходят через заранее просверленные отверстия или прикрепленные петли. Альтернативно можно использовать любое количество других возможных способов для крепления первых и вторых элементов подвески, включая: крюки или механически обработанную точку крепление наподобие крюка, соединенную с точками крепления, посредством которой элементы подвески могут быть закреплены на крюках и затем покрыты силиконом; альтернативно петли на первых и вторых элементах подвески могут быть ввинчены в точки крепления; еще одна возможность заключается в приклеивании первых и вторых элементов подвески к внутренней раме и к секциям наружной рамы или промежуточной рамы.
Как показано на Фиг.8 и 9, первые и вторые элементы подвески 32 и 76 проходят под углом, отличающимся от 90 градусов, чтобы радиально и продольно смещать секцию внутренней рамы 12А и катушки приемника 116 в центральном положении во внутренние каналы катушки приемника 124, соответственно. Схемы одинарной и двойной подвески, которые описаны выше, могут по меньшей мере в некоторых вариантах осуществления улучшать отношение "сигнал-шум" узла катушки приемника путем уменьшения влияний вибрации узла катушки приемника на катушку приемника. В других примерах вариантов осуществления могут быть использованы другие опорные механизмы, включая тройную подвеску, пружины, окружение катушки пеной или другие средства позиционирования катушки в центре внутренней раме так, чтобы шум был снижен.
На Фиг.10 показана еще одна возможная конфигурация подвески для внутренней рамы 12А. Конфигурация, показанная на Фиг.10, подобно конфигурации, описанной выше в отношении Фиг.6 и 7, с добавлением промежуточных жестких стержней 94, которые проходят продольно в канале 124 между противоположными сторонами внутренней рамы 12А и стенкой, определяемой элементом наружной рамы 130, 132, 134 или 136. Упругие элементы подвески 32 на одной стороне внутренней рамы 12А прикреплены каждый приблизительно в средней точке 98 к одному из жестких стержней 94, и упругие элементы подвески 32 на противоположной стороне внутренней рамы 12А прикреплены каждый в средней точке 98 к другому из жестких стержней 94. Стержни 94 могут связывать элементы подвески для распределения сил, прилагаемых к любому отдельному элементу, между некоторым количеством элементов подвески. Дополнительно сами стержни 94 могут действовать как конструкции, поглощающие энергию. Стержни 94 в некоторых вариантах осуществления могут быть разделены на меньшие секции.
Другие примеры вариантов осуществления систем подвески катушки, подходящих для использования в узле катушки приемника 112, описаны, например, в патентных заявках РСТ/СА 2009/000607 и U.S. 12/118,194, соответственные содержания которых включены в настоящий документ путем ссылки.
Использование прямоугольной рамы с открытым центром, такой как буксируемый узел катушки приемника 112, может по меньшей мере в некоторых конфигурациях поддерживать относительно большую катушку приемника 116 легко и с хорошей аэродинамикой по сравнению, например, с гондолами, которые в прошлом буксировали воздушные суда с неподвижным крылом.
Хотя буксируемый узел катушки приемника был описан как имеющий конфигурации прямоугольного контура с центральным опорным элементом, альтернативно могут быть использованы другие типы рам с открытым центром, включая, например, треугольные конфигурации, пятисторонние или многосторонние простые многоугольные конфигурации, круглые, овальные, эллиптические конфигурации, помимо прочих.
В некоторых примерах вариантов осуществления система 100 буксируемого узла для геофизической электромагнитной (ЭМ) съемки конфигурирована для использования в системе геофизической разведки типа АФМАГ, которая зависит от измерений угла наклона, как сказано, например, в вышеупомянутом патенте США №6,876,202, включенном в настоящий документ путем ссылки. При таком применении датчики пространственного положения могут быть расположены на узле катушки приемника 112, чтобы можно было обнаруживать ориентацию такого узла и использовать информацию по ориентации в вычислениях данных по углам наклона, которые получают из сигналов, принимаемых с узла катушки приемника. Например, один или несколько акселерометров могут быть прикреплены к узлу катушки 112, чтобы определять данные по пространственному положению. Альтернативно, GPS-приемники могут быть размещены в разнесенных местах на узле катушки приемника, чтобы отслеживать ее пространственное положение.
В этом отношении на Фиг.5 показана система съемки АФМАГ 200 согласно одному примеру варианта осуществления, который включает систему 100 буксируемого узла для геофизической электромагнитной (ЭМ) съемки. Как сказано выше, системы АФМАГ измеряют ЭМ-поля, исходящие от встречающихся в естественных условиях первичных источников сигнала. Система АФМАГ 200 включает систему 100 буксируемого узла для геофизической электромагнитной (ЭМ) съемки и наземный узел 14. Система 100 буксируемого узла для геофизической электромагнитной (ЭМ) съемки прикреплена к воздушному судну с неподвижным крылом для буксировки над областью съемки и включает катушку приемника 116 и малошумящий усилитель 18. В одном примере варианта осуществления катушка приемника 116 имеет ориентацию вертикального диполя во время полета, чтобы обеспечивать измерения электромагнитных полей по Z-оси. Система буксируемого узла 100 соединена с оборудованием для обработки сигнала, которое обычно расположено в воздушном судне, например, с компьютером 22, которое включает аналого-цифровой преобразователь (АЦП) 24, соединенный с выходом малошумящего усилителя 18. Бортовой компьютер 22 оснащен одним или несколькими элементами памяти, которые могут включать оперативную память, флэш-память, жесткий диск или другие типы электронных устройств памяти, и может быть конфигурирован для выполнения функций обработки данных по сигналам, принимаемым отдатчика 16.
В одном примере варианта осуществления система буксируемого узла 100 также включает устройство обнаружения пространственного положения 28, чтобы компенсировать крен, угол тангажа или угол рыскания в воздухе узла 12 и, в частности, катушки 116 в полете, которые могут вызывать аномалии при измерении углов наклона из-за электромагнитных полей, создаваемых катушкой 116 электромагнитного датчика. Устройство обнаружения пространственного положения 28 включает инклинометры для измерения крена, угла тангажа и угла рыскания узла катушки 112 и, в частности, катушки датчика 116 во время полета в любой момент времени. В дополнение к измерениям угла рыскани, устройство обнаружения пространственного положения 28 может включать устройство для отслеживания пути полета, такое как компас, использующее направление вектора геомагнитного поля. В примерах вариантов осуществления узел катушки 112 или буксирующее воздушное судно 104 может включать устройство Глобальной системы позиционирования ("GPS"), так что данные, полученные от катушки датчика 116 и устройства обнаружения пространственного положения 28, могут быть соотнесены с географическим положением и временем GPS и в конечном итоге использованы или в компьютере 22, или в удаленном компьютере для обработки данных 26 для коррекции измерений углов наклона электромагнитных полей, чтобы отражать перемещения узла катушки 112 и, в частности, катушки датчика 116 и соотносить данные по электромагнитным полям, полученные от датчика 116, с данными по пространственному положению узла катушки 112. Это позволяет получать данные съемки, которые могут быть скорректированы на основании изменений пространственного положения катушки датчика 116 во время полета.
В одном примере варианта осуществления бортовое оборудование также включает устройство 36 для измерения географического рельефа, соединенное с бортовым компьютером 22, чтобы компенсировать географический рельеф, который в ином случае мог бы искажать горизонтальные магнитные поля, создавая ложные аномалии углов наклона, где существуют очень однородные скальные породы под земной поверхностью. Устройство 36 для измерения географического рельефа собирает данные для пост-полетных (или, в некоторых случаях, оперативных) вычислений углов наклона географического рельефа в области съемки. В одном примере варианта осуществления устройство 36 для измерения географического рельефа включает первым альтиметр, который предоставляет данные относительно абсолютной высоты бортового датчика 16 над фиксированной опорной точкой (например, над уровнем моря), и второй альтиметр, который предоставляет данные по относительной высоте бортового датчика 16 над фактическим рельефом съемки. Сравнение данных по относительной высоте и данных по абсолютной высоте в локальной системе координат области съемки позволяет оценивать географический рельеф области съемки, который можно использовать для вычислений углов наклона географического рельефа области съемки.
Наземный узел 14 конфигурирован для размещения в стационарной базовой точке и включает пару электромагнитных датчиков 17, соединенных через малошумящий усилитель 19 с компьютером 23 наземного узла. Водном примере варианта осуществления электромагнитными датчиками 17 являются катушки приемников, конфигурированные для осуществления измерений магнитных полей по осям Х и Y. Компьютер 23 включает аналого-цифровой преобразователь (АЦП) 25, соединенный с выходом малошумящего усилителя 19, и оснащен одним или несколькими элементами памяти, которые могут включать ОЗУ, флэш-память, жесткий диск или другие типы электронных средств памяти, и может быть конфигурирован для выполнения функций обработки данных по сигналам, принимаемым отдатчиков 17. Наземный узел также может включать GPS-приемник, чтобы данные по осям Х и Y, полученные от датчиков 17, могли быть помечены временем часов GPS для соотнесения с данными по оси Z, которые зарегистрированы бортовым компьютером 22 (Z-ось является вертикальной осью, и оси Х и Y являются ортогональными горизонтальными осями).
В одном примере варианта осуществления, данные, собранные бортовым компьютером 22, и данные, собранные наземным компьютером 23, в конечном итоге передаются по соответственным каналам связи 30, 32 (которые могут быть проводными или беспроводными, или могут включать физический перенос среды памяти) в компьютер 26 для обработки данных, в котором могут быть обработаны данные по электромагнитным полям, полученные от датчиков 16 и 17, данные по положению от устройства 28 обнаружения пространственного положения, данные от устройства 36 измерения географического рельефа и данные GPS от GPS-датчиков, связанные с каждым из воздушного узла 12 и наземного узла 14, чтобы определить характеристики наклона для места съемки с использованием способов, описанных, например, в патенте США №6,876,202. Такую информацию затем можно использовать для определения моделей электропроводности для места съемки, чтобы идентифицировать аномалии для дальнейших исследований.
Соответственно, в одном примере варианта осуществления узел катушки приемника 112 (также именуемый "гондола") теперь будет описан как неограничивающий пример. В таком примере гондола 112 вмещает многовитковый прямоугольный контур или катушку 116 вместе с ее системой подвески и электроникой. При буксировке в полете ось катушки 116 номинально вертикальная. Размер контура ограничен пространством, доступным под буксирующим воздушным судном для размещения контура во время взлета и посадки. В случае буксирующего воздушного судна Cessna 208B размеры контура могут составлять, как не ограничивающий пример, 3 м от центра до центра в поперечном направлении и 4 м от центра до центра в продольном направлении. В случае более крупного буксирующего воздушного судна можно использовать более крупный контур, например, до 8 м в поперечнике и в длину, чтобы добиться улучшенного отношения "сигнал-шум". Меньшие контуры, например, по 3 м в поперечнике и в длину, могут давать подходящие результаты при использовании с меньшим воздушным судном. Центральная открытая область 122 имеет размеры лишь немного меньшие, чем размеры катушки 116. Масса контура, системы подвески и электроники может составлять приблизительно 60 кг, при приблизительно равномерном распределении вокруг опорной рамы катушки приемника, тогда как в некоторых вариантах осуществления гондола может иметь совокупную массу 150 кг, больше или меньше. В одном примере гондола 112 имеет закрытый чистый канал 224 с круглым поперечным сечением по меньшей мере 0,22 м внутреннего диаметра для установки контура. На внутренней поверхности канала 224 предусмотрено несколько точек крепления для подвешивания катушки 116. Гондола 112 может быть разделена по горизонтальной плоскости, чтобы открыть канал для установки или сервисного обслуживания контура 116 и подвески без разборки контура.
В некоторых примерах вариантов осуществления гондола 112 изготовлена из материалов, которые являются электропроводящими и немагнитными, за исключением того, что крепежные элементы могут быть выполнены из латуни, алюминия или нержавеющей стали 316. Компоненты гондолы 112 выполнены аэродинамическими, чтобы минимизировать вибрацию, вызываемую потоком воздуха, обтекающим гондолу 112. В одном примере полета для съемки гондолу 112 буксирует воздушное судно с неподвижным крылом, такое как, например, Cessna 208В Caravan, на скорости 80-120 узлов при тросе 100 м. При взлете, крейсерской скорости и посадке гондола 112 крепится в люльке (система защелок 150), прикрепленной к дну фюзеляжа воздушного судна. В некоторых примерах вариантов осуществления буксирный трос 110 может быть электромеханическим кабелем, включающим несущий кабель с проводником, эквивалентный коаксиальному кабелю RG58A/U или лучше, или, альтернативно, он может включать по меньшей мере четыре витых пары по меньшей мере AWG 20. Несущий кабель буксирного троса 110 изготовлен, в сущности, из немагнитных материалов.
Буксирно-запорный узел включает систему гидравлической лебедки 105, установленную на воздушное судно 104, которую используют для развертывания гондолы 112 и возвращения ее в люльку в полете под управлением оператора в воздушном судне. В одном примере при полете с буксировкой гондола 112 аэродинамически стабильна, и угол тангажа и пространственный крен канала 224 для контура 116 составляет ±5° от горизонтали. В некоторых примерах вариантов осуществления буксирная точка на гондоле может быть вручную изменена вперед и назад на земле путем регулировки положения фиксатора 144 буксирного троса, чтобы достигнуть горизонтального пространственного положения в полете. Альтернативой электромеханическому буксирному тросу является использование неэлектрического буксирного троса и использование работающей от аккумулятора радиотелеметрической системы для передачи данных на воздушное судно.
Специалистам в данной области техники будет понятно, что на практике могут быть осуществлены другие варианты осуществления, отличные от описанных в настоящем документе, но без нарушения объема изобретения. Поэтому возможны другие модификации.





Изобретение относится к системам и способам электромагнитной съемки местности. Система бортовой геофизической электромагнитной съемки включает воздушное судно с неподвижным крылом, узел катушки приемника, систему лебедки, имеющую буксирный трос, прикрепленный к узлу катушки приемника для перевода узла катушки приемника в положение для съемки и систему защелок для установки на нижнюю сторону воздушного судна, имеющую раскрываемые запорные элементы для зацепления узла катушки приемника, когда узел катушки приемника находится во втянутом положении. Узел катушки приемника состоит из трубчатой рамы, формирующей непрерывный внутренний канал, который проходит вокруг центральной открытой области, при этом катушка приемника расположена во внутреннем канале. Система геофизической съемки также включает оборудование для обработки сигналов от катушки приемника, представляющих электромагнитные поля, созданные местностью, на которой ведется съемка, как реакция на электрические события, встречающиеся в естественных условиях. Повышается эффективность геофизической электромагнитной съемки местности с самолета. 3 н. и 17 з.п. ф-лы, 10 ил.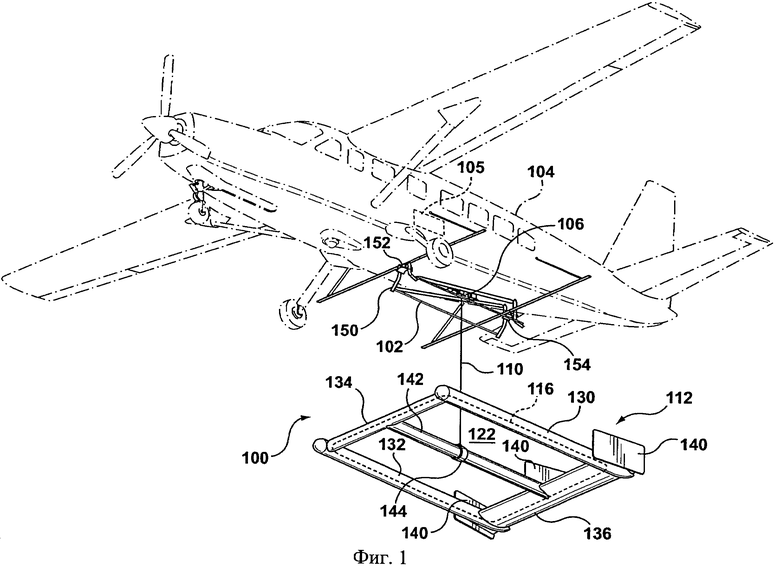
1. Система буксируемого узла для бортовой геофизической электромагнитной (ЭМ) съемки для использования с воздушным судном с неподвижным крылом, включающая:
узел катушки приемника, включающий в сущности жесткую трубчатую раму катушки приемника, формирующую непрерывный внутренний канал, который проходит вокруг центральной открытой области, и при этом катушка приемника расположена во внутреннем канале;
систему лебедки для прикрепления к воздушному судну с неподвижным крылом, причем система лебедки имеет буксирный трос, прикрепленный к узлу катушки приемника, и выполнена так, чтобы разматывать буксирный трос для подвешивания узла катушки приемника с воздушного судна с неподвижным крылом с катушкой приемника в номинально горизонтальной ориентации во время съемки и чтобы наматывать буксирный трос для перевода узла катушки приемника во втянутое положение на нижней стороне воздушного судна с неподвижным крылом при взлете и посадке; и
систему защелок для установки на нижнюю сторону воздушного судна, имеющую раскрываемые запорные элементы, входящие в зацепление с узлом катушки приемника, когда узел катушки приемника находится во втянутом положении.
2. Система по п.1, отличающаяся тем, что рама катушки приемника сформирована парой разнесенных параллельных боковых элементов трубчатой рамы, соединенных между собой на ее переднем конце передним элементом трубчатой рамы и соединенных между собой на ее заднем конце задним элементом трубчатой рамы.
3. Система по п.2, включающая удлиненный опорный элемент, проходящий через центральную открытую область от переднего элемента трубчатой рамы до заднего элемента трубчатой рамы, отличающаяся тем, что буксирный трос прикреплен к удлиненному опорному элементу.
4. Система по п.3, отличающаяся тем, что запорные элементы включают первую пару и вторую пару противоположных запорных рычагов для запирания с возможностью освобождения удлиненного опорного элемента, входящих в зацепление с узлом катушки приемника, когда узел катушки приемника находится во втянутом положении.
5. Система по п.3, отличающаяся тем, что буксирный трос прикреплен к удлиненному опорному элементу фиксатором буксирного троса, который может перемещаться вперед и назад на удлиненном опорном элементе, чтобы регулировать пространственное положение узла катушки приемника в полете.
6. Система по любому из пп.2-5, отличающаяся тем, что боковые элементы трубчатой рамы имеют большую длину, чем передний и задний элементы трубчатой рамы, и вертикальные стабилизаторы рамы катушки приемника расположены рядом с задним концом относительно направления полета, чтобы помогать удерживать узел катушки приемника ориентированным в постоянном направлении во время полета с катушкой приемника, подвешенной в номинально горизонтальной ориентации, с вертикально ориентированной ее осью, причем задний элемент трубчатой рамы имеет плоскую крыловидную конфигурацию.
7. Система по любому из пп. 2-5, отличающаяся тем, что боковые элементы трубчатой рамы и передние и задние элементы трубчатой рамы каждый сформированы из верхней и нижней частей, которые могут быть отделены друг от друга, чтобы открыть внутренний канал.
8. Система по любому из пп.1-5, включающая оборудование для обработки сигнала для приема от катушки приемника сигналов, которые представляют ЭМ-поля, генерируемые как реакция на электрические события, встречающиеся в естественных условиях.
9. Система по любому из пп. 1-5, отличающаяся тем, что катушка приемника упруго подвешена во внутреннем канале.
10. Система по п.9, отличающаяся тем, что катушка приемника поддерживается в секции внутренней рамы, которая упруго подвешена во внутреннем канале.
11. Система по п.10, отличающаяся тем, что упругие элементы проходят от внутренней стенки трубчатой рамы катушки приемника до секции внутренней рамы.
12. Система по п.11, отличающаяся тем, что упругие элементы расположены так, чтобы прилагать противоположно направленные силы на секцию внутренней рамы, чтобы смещать к центру секцию внутренней рамы во внутреннем канале.
13. Система по любому из пп.1-5, 10-12, отличающаяся тем, что катушка приемника имеет минимальный диаметр от 3 до 8 метров.
14. Система для бортовой геофизической электромагнитной (ЭМ) съемки, включающая:
воздушное судно с неподвижным крылом;
узел катушки приемника, включающий в сущности жесткую трубчатую раму катушки приемника, формирующую непрерывный внутренний канал, который проходит вокруг центральной открытой области, в которой воздух может проходить через раму катушки приемника, при этом катушка приемника расположена во внутреннем канале, и удлиненный опорный элемент, проходящий через центральную открытую область между разнесенными частями рамы катушки приемника;
систему лебедки, установленную на воздушном судне с неподвижным крылом, причем система лебедки имеет буксирный трос, прикрепленный к узлу катушки приемника, и выполнена так, чтобы разматывать буксирный трос для подвешивания узла катушки приемника с воздушного судна с неподвижным крылом с катушкой приемника в номинально горизонтальной ориентации во время съемки и чтобы наматывать буксирный трос для перевода узла катушки приемника во втянутое положение на нижней стороне воздушного судна с неподвижным крылом при взлете и посадке;
систему защелок для установки на нижнюю сторону воздушного судна, имеющую раскрываемые запорные элементы для зацепления удлиненного опорного элемента, когда узел катушки приемника находится во втянутом положении; и
оборудование для обработки сигнала в связи с катушкой приемника для приема от нее сигналов, представляющих ЭМ-поля, созданные местностью, на которой ведется съемка как реакция на электрические события, встречающиеся в естественных условиях.
15. Система по п.14, отличающаяся тем, что рама катушки приемника сформирована парой разнесенных параллельных боковых элементов трубчатой рамы, соединенных между собой на ее переднем конце передним элементом трубчатой рамы и соединенных между собой на ее заднем конце задним элементом трубчатой рамы.
16. Система по п.15, отличающаяся тем, что удлиненный опорный элемент проходит через центральную открытую область от переднего элемента трубчатой рамы до заднего элемента трубчатой рамы, при этом буксирный трос прикреплен к удлиненному опорному элементу.
17. Система по п.16, отличающаяся тем, что запорные элементы включают первую пару и вторую пару противоположных запорных рычагов для запирания с возможностью освобождения удлиненного опорного элемента и входят в зацепление с узлом катушки приемника, когда узел катушки приемника находится во втянутом положении.
18. Система по любому из пп.14-17, отличающаяся тем, что катушка приемника имеет минимальный диаметр 3 метра.
19. Способ выполнения бортовой геофизической съемки с использованием воздушного судна с неподвижным крылом, включающий:
предоставление узла катушки приемника, включающего в сущности жесткую трубчатую раму катушки приемника, формирующую непрерывный внутренний канал, который проходит вокруг центральной открытой области, в которой воздух может проходить через раму катушки приемника, и при этом катушка приемника расположена во внутреннем канале;
установку на воздушное судно с неподвижным крылом системы лебедки, имеющей буксирный трос, прикрепленный к узлу катушки приемника, и выполненной так, чтобы разматывать буксирный трос для подвешивания узла катушки приемника с воздушного судна с неподвижным крылом и чтобы наматывать буксирный трос для перевода узла катушки приемника во втянутое положение на нижней стороне воздушного судна с неподвижным крылом при взлете и посадке;
установку на нижнюю сторону воздушного судна с неподвижным крылом системы защелок, имеющей раскрываемые запорные элементы, чтобы входить в зацепление с удлиненным опорным элементом, когда узел катушки приемника находится во втянутом положении; и
разматывание буксирного троса во время полета воздушного судна с неподвижным крылом для подвешивания рамы катушки приемника в номинально горизонтальном положении и приема сигналов с катушки приемника.
20. Способ по п.19, отличающийся тем, что сигналы представляют магнитные поля, созданные местностью, на которой ведется съемка как реакция на электрические события, встречающиеся в естественных условиях.
| US 3872375 A1, 28.03.1975 | |||
| WO 2009105873 A1, 03.09.2009 | |||
| УСТРОЙСТВО ДЛЯ АЭРОГЕОФИЗИЧЕСКОЙ РАЗВЕДКИ (ВАРИАНТЫ) | 2002 |
|
RU2201603C1 |
| CA 1132659 A1, 28.09.1982 | |||

