Изобретение относится к реверсорам тяги для гондол летательных аппаратов.
В частности, оно касается решетчатых реверсоров тяги, содержащих, по меньшей мере, один капот, выполненный с возможностью перемещения из так называемого «положения прямой тяги», соответствующего нормальной полетной ситуации, в так называемое «положение обратной тяги», которое соответствует приземлению. Это позволяет возвращать в переднюю зону летательного аппарата часть тяги двигателей и тем самым уменьшать тормозной путь.
Из предшествующего уровня техники известны средства электрического привода подобного капота с его перемещением между двумя указанными выше положениями. Они представляют собой, как правило, шариковые винты, приводимые в движение с помощью электродвигателей, управляемых от средств электронного контроля.
Традиционно предусматривают по несколько приводов для каждого подвижного капота (или, когда капот разделен на две половины, для каждого подвижного полукапота).
Работа этих электроприводов должна быть синхронизирована во избежание заклинивания, а в самых тяжелых ситуациях и последующего блокирования подвижного капота.
Из уровня техники известно, например, техническое решение, раскрытое в документе US 6771032.
В документе US 6771032 раскрыт реверсор тяги, содержащий два подвижных капота, причем каждый капот приводится в движение двумя приводами. Приводы первого капота приводятся в движение первым двигателем, а приводы второго капота приводятся в движение вторым двигателем. Каждый двигатель находится под управлением системы управления двигателями. Положение одного капота отслеживают с использованием системы ЛРДТ (Линейно регулируемый дифференциальный трансформатор), которая подает сигнал положения системе управления двигателями. Аналогично вторая система ЛРДТ направляет сообщение о положении второго капота системе управления двигателями. Имеется также блок синхронизации капотов, который получает сигналы положения капотов от каждой системы ЛРДТ, соответствующей своему капоту. Этот блок синхронизации капотов использует сигналы обратной связи относительно положения капотов для обнаружения расхождения между положениями двух капотов и изменяет сигнал позиционирования. Таким образом в документе US 6771032 раскрыто, каким образом синхронизировать капоты между собой, но не раскрыто, как синхронизировать между собой приводы одного и того же капота во избежание заклинивания.
Таким образом, одной из целей изобретения является разработка способа управления работой подобных приводов, который позволил бы предотвратить опасность рассинхронизации приводов.
Для достижения этой цели предложен способ управления рядом приводов подвижного капота реверсора тяги, отличающийся тем, что измеряют в реальном времени расхождения положений смежных приводов, и тем, что изменяют профиль скорости соответствующего(их) привода(ов) в зависимости от отклонения положения, превышающего некоторый заданный порог.
Благодаря предложенному способу, как только выявлено слишком большое расхождение положений между смежными приводами, можно ускорить или замедлить работу соответствующего(их) привода(ов), с тем чтобы компенсировать это расхождение и предотвратить деформацию и/или блокирование подвижного капота реверсора тяги.
В соответствии с другими необязательными признаками предлагаемого способа,
- когда указанное измерение показывает, что один из приводов запаздывает по отношению к другим приводам, выполняют ускорение этого привода. Благодаря этому запаздывающий привод может «догнать» другие;
- когда указанное измерение показывает, что один из приводов запаздывает по отношению к другим приводам, выполняют замедление этих других приводов. Эту возможность, благодаря которой удается согласовывать скорость других приводов с запаздывающим, можно использовать либо сразу, либо после того, как не удалось предыдущее действие (ускорение запаздывающего привода), либо одновременно с этим предыдущим действием;
- когда указанное измерение показывает, что один из приводов опережает другие приводы, выполняют замедление этого привода; благодаря этому удается согласовать скорость опережающего привода с другими;
- когда указанное измерение показывает, что один из приводов опережает другие приводы, выполняют ускорение этих других приводов. Эту возможность, благодаря которой другие приводы могут «догнать» опережающий, можно использовать либо сразу, либо после того, как не удалось предыдущее действие (замедление опережающего привода), либо одновременно с этим предыдущим действием;
- работой указанных других приводов управляют в шаговом режиме.
Благодаря такому шаговому управлению работой других приводов, то есть тех, которые функционируют нормально, удается снизить риск заклинивания;
- осуществляют пошаговые управляющие воздействия на указанные другие приводы в импульсном режиме. Благодаря этой возможности удается сообщать подвижному капоту моменты в разных направлениях, что может понадобиться, в частности, для перехода через точку блокировки одного из силовых цилиндров;
- указанный подвижный капот останавливают, если один из указанных приводов блокирован или если не удается компенсировать запаздывание и/или опережение указанного(ых) привода(ов) по отношению к другим приводам. Благодаря этому последнему этапу удается предотвратить блокирование, и/или деформацию, и/или поломку подвижного капота.
Другие признаки и преимущества изобретения явствуют из нижеследующего описания, приводимого со ссылками на приложенные чертежи, на которых:
фиг.1 представляет собой вид в поперечном разрезе реверсора тяги, к которому применим способ управления согласно изобретению;
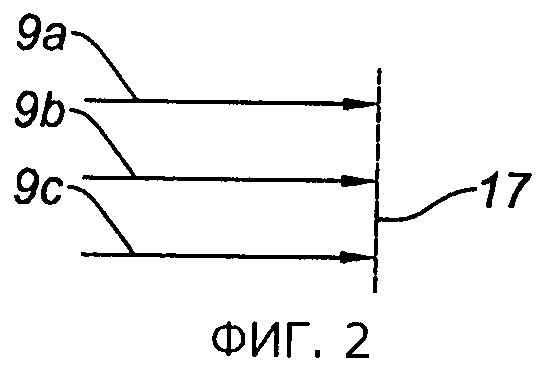
фиг.2 - схематическое изображение трех приводов подвижного капота данного реверсора тяги в ситуации, когда эти три привода синхронизированы;
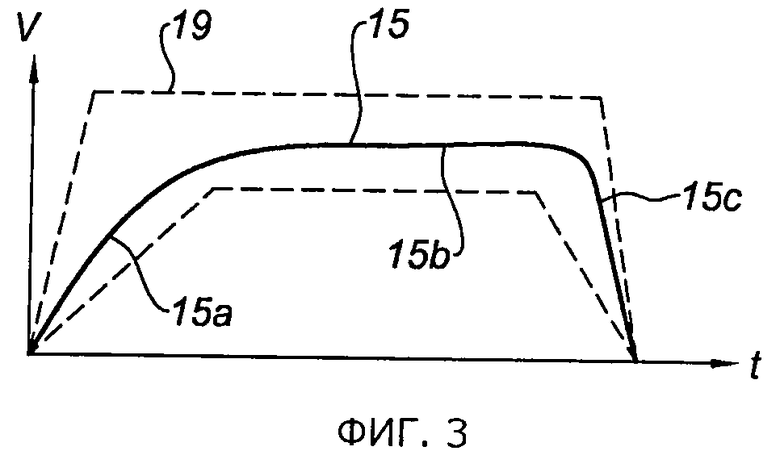
фиг.3 - типовые профили скорости для каждого из трех приводов, а также огибающая изменения профиля, предусмотренная в рамках настоящего изобретения;
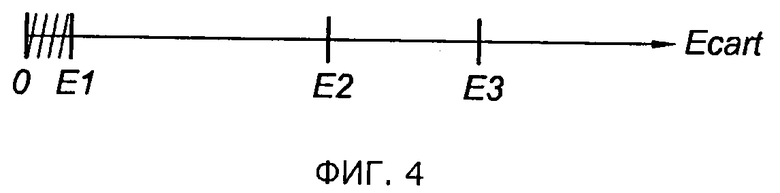
фиг.4 - схематическое изображение порогов расхождения положений между смежными приводами подвижного капота реверсора тяги по фиг.1, на основании каковых порогов включаются некоторые управляющие воздействия;
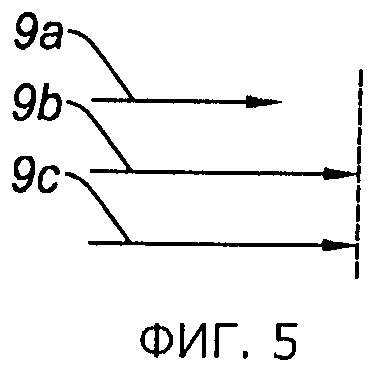
фиг.5 - вид, аналогичный представленному на фиг.2, который иллюстрирует случай, когда один из трех приводов подвижного капота запаздывает по отношению к двум другим приводам;
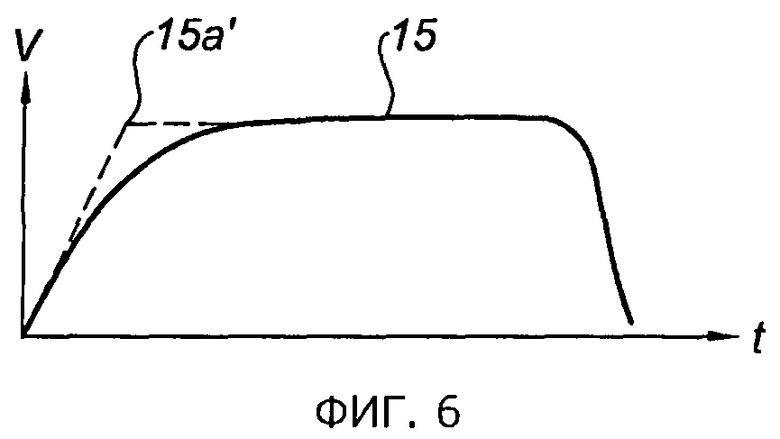
фиг.6 - вид, аналогичный представленному на фиг.3, который иллюстрирует коррекцию профиля скорости применительно к запаздывающему приводу по фиг.5;
фиг.7 - профили скорости, которые могут быть применены к двум исправным приводам, когда третий неисправен или даже заблокирован;
фиг.8 - вид, аналогичный представленным на фиг.2 и 5, который схематически иллюстрирует случай, когда один из трех приводов опережает два остальных;
фиг.9 - вид, аналогичный представленным на фиг.3 и 6, на котором показано изменение, внесенное в профиль скорости опережающего привода;
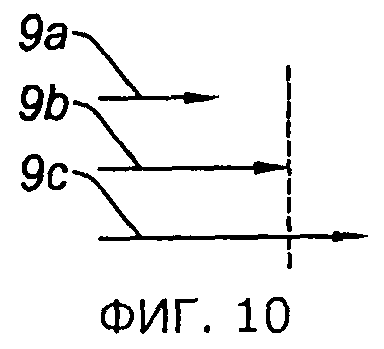
фиг.10 - иллюстрация комбинированного случая, когда один из приводов оказывается запаздывающим, а другой опережающим по отношению к стандартному профилю скорости.
В ходе нижеследующего описания акцент будет сделан на частный случай с реверсором тяги, подвижный капот которого проходит практически вокруг всей окружности гондолы и приводится в движение с помощью трех электроприводов.
Должно быть совершенно очевидно, что изобретение никоим образом не ограничивается этим частным случаем и применимо также к подвижному капоту, приводимому в движение двумя электроприводами или электроприводами в количестве больше трех, а также к подвижному капоту, состоящему из двух подвижных полукапотов, которые могут при необходимости перемещаться независимо один от другого.
Перейдем к рассмотрению фиг.1, где схематично показан подвижный капот реверсора тяги, смонтированный с возможностью скольжения по стойке из положения, соответствующего режиму «прямой тяги», в положение «обратной тяги».
Скольжение подвижного капота 1 по стойке 3 возможно благодаря известной системе 5, состоящей из направляющего рельса и ползуна, и позволяет на этапе приземления отклонять, по меньшей мере, часть циркулирующего по тракту 7 воздушного потока в сторону передней зоны гондолы, снабженной таким реверсором тяги.
Как было разъяснено во вводной части описания, благодаря этому удается значительно уменьшить тормозной путь летательного аппарата при посадке. Приведение подвижного капота 1 в движение из положения «прямой тяги» в положение «обратной тяги» осуществляется с помощью электроприводов 9а, 9b, 9с, которые в данном примере размещены с интервалами порядка 120°.
Как и во всех традиционных системах, каждый из подобных электроприводов может включать в себя, как правило, один электродвигатель, взаимодействующий с шариковым винтом через посредство специального редуктора скорости.
Для указанных трех электроприводов предусмотрено электронное управление от блока контроля 11, снабженного запоминающим устройством 13, в котором хранятся профили скорости этих приводов.
Здесь под профилем скорости мы понимаем кривую 15 изменения скорости (см. фиг.3) для каждого привода в зависимости от времени.
Как видно на фиг.3, эта типовая кривая 15 имеет, как правило, первый участок 15а, соответствующий ускорению привода, за которым следует горизонтальный участок 15b, соответствующий практически постоянной скорости, а после этого участка идет этап 15с резкого замедления.
Для достижения оптимального функционирования реверсора тяги важно, чтобы все три привода 9а, 9b, 9с были синхронизированы, то есть чтобы в каждый данный момент их положения были практически одинаковыми.
Такая ситуация схематически показана на фиг.2, где направление перемещения трех силовых цилиндров 9а, 9b, 9с обозначено тремя стрелками, - тот факт, что концы всех расположены на одной линии, говорит о том, что обеспечена идеальная синхронизация положений всех трех приводов.
В каждый данный момент блок контроля 11 измеряет расхождения положений двух смежных приводов, то есть в нашем случае 9а и 9b, 9b и 9с, 9с и 9а.
Это расхождение положений смежных приводов каждой пары схематически показано на фиг.4 - первое заданное значение расхождения - Е1 - характеризует неточности измерения и обработки; второе - Е2 - обозначает максимально допустимое расхождение положений двух смежных приводов.
Это максимальное расхождение определяется, исходя из механических допусков различных компонентов реверсора тяги.
Когда расхождение положений двух смежных приводов превышает Е2, запускается соответствующее корректирующее действие, которое определяется характером расхождения (его мы рассмотрим позже).
Когда расхождение положений двух смежных приводов превышает третье заданное значение расхождения, Е3, которое больше, чем Е2, все приводы останавливают во избежание деформации и/или поломки каких-нибудь компонентов реверсора тяги.
Способ согласно изобретению состоит, по сути дела, в том, чтобы в случае, когда, по меньшей мере, одно из измеренных расхождений между смежными приводами находится в пределах от Е2 до Е3, было запущено корректирующее действие, заключающееся в изменении профиля скорости силового(ых) цилиндра(ов), функционирующего с нарушениями, и/или силового(ых) цилиндра(ов), функционирующего(их) нормально.
Указанное изменение профиля скорости схематически показано на фиг.3 в виде пунктирной огибающей.
Как видно по этой огибающей, изменение профиля скорости может представлять собой, в частности, увеличение ускорения в начале хода привода (участок 15а кривой), и/или увеличение скорости на горизонтальном участке (15b), и/или уменьшение замедления в конце хода привода (участок 15с).
Теперь рассмотрим изложенные выше общие принципы применительно к различным ситуациям, взятым в качестве примеров.
На фиг.5 представлен случай, когда один из приводов, 9а, запаздывает по отношению к двум другим приводам 9b, 9с.
Это запаздывание может быть связано, в частности, с неисправностью данного привода, которое может иметь либо электрическую природу (потеря контроля за приводом со стороны блока контроля 11, отказ электродвигателя), либо механическую (внутренний износ, усиление трения, ухудшение рабочих характеристик шарикоподшипников, вибрации, колебания температуры, дифференциальное расширение и пр.).
Когда блок контроля 11 обнаруживает запаздывание привода 9а, он может дать команду, например, на увеличение ускорения этого привода в начале его хода - это схематически показано пунктирным участком 15а', добавленным к стандартному профилю скорости 15 на фиг.6.
После того, как привод 9а дойдет до положения двух других приводов 9b, 9с, к этому приводу 9а снова будет применен стандартный профиль скорости 15.
Если окажется, что проведенной коррекции недостаточно, можно предусмотреть одновременную или последующую коррекцию стандартных профилей скорости двух других приводов 9b, 9с, с тем чтобы добиться их замедления с согласованием их скорости с более медленным приводом 9а.
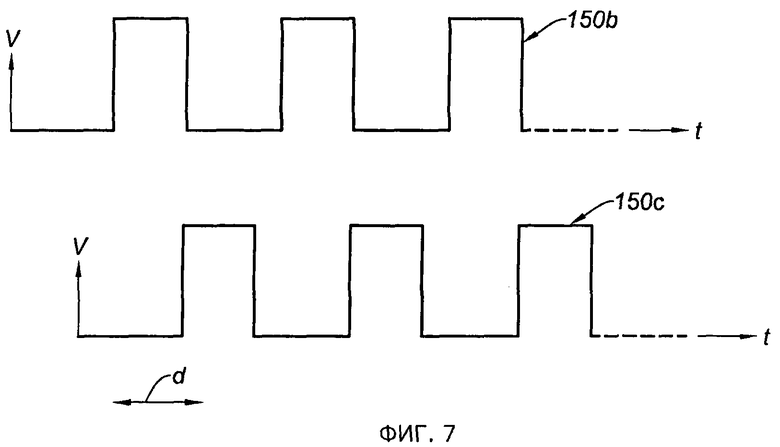
Следует иметь в виду, что указанное замедление двух приводов 9b, 9с можно выполнить с использованием особых профилей скорости 150b (применительно к приводу 9b) и 150с (для привода 9с), которые приведены на фиг.7.
Как можно здесь видеть, речь идет о профилях скорости «шагового» типа (их называют также «импульсными»).
Такие особые профили скорости рекомендуются, в частности, в тех случаях, когда в работе запаздывающего привода 9а возникает какая-либо помеха (заедание).
По сути дела оказывается, что в этом частном случае рассматриваемые профили скорости двух исправных приводов 9b, 9с позволяют минимизировать риск заклинивания подвижного капота 1.
Если говорить конкретнее, шаговые профили скорости, заданные для двух исправных приводов 9b, 9с, можно сместить на некоторый временной период d (см. фиг.7).
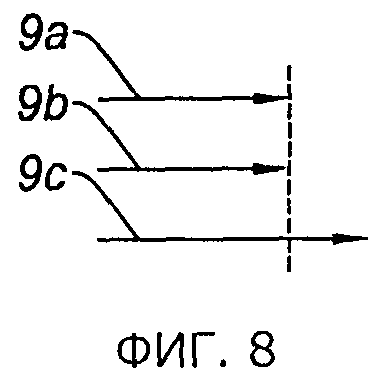
В случае, проиллюстрированном на фиг.8, один из приводов, 9с, опережает два других, 9а и 9b.
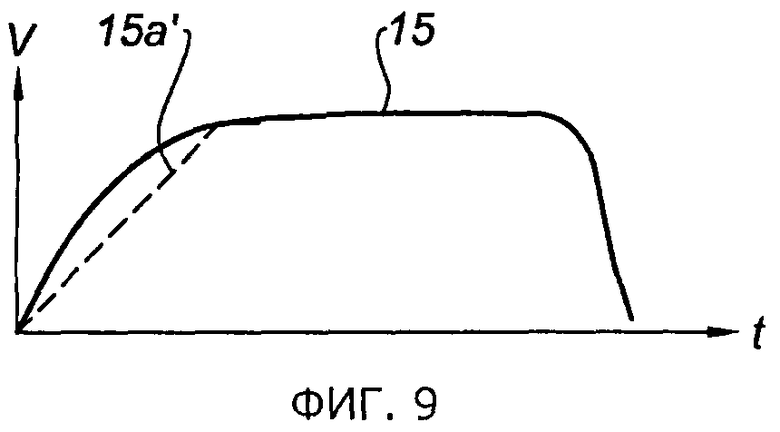
В этой ситуации блок контроля 11 может, в частности, дать команду на уменьшение замедления этого привода вначале его хода, как показано на фиг.9 пунктирной линией 15а'.
Если этой коррекции достаточно для синхронизации всех трех приводов, то блок контроля 11 снова задаст приводу 9с стандартный профиль скорости.
В случае необходимости можно либо одновременно, либо позже выполнить ускорение двух приводов 9а, 9b, с тем чтобы они могли «догнать» опережающий привод 9с.
Сразу после того, как такое выравнивание скоростей достигнуто, приводам 9а, 9b снова задается стандартная кривая скорости.
В ситуации, представленной на фиг.10, мы имеем, с одной стороны, запаздывающий привод 9а, а с другой - опережающий привод 9с.
В этом частном случае производят одновременное или последовательное комбинирование сценариев, описанных выше при рассмотрении фиг.5 и 8.
Если говорить точнее, можно сначала выполнить ускорение привода 9а, затем замедление привода 9с, а после этого, если сохраняется сдвиг скоростей двух приводов относительно третьего, замедлить или ускорить эти два привода в зависимости от данной конкретной ситуации.
Итак, как можно понять из вышесказанного, благодаря предлагаемому способу появляется исключительно эффективное средство диагностики расхождения положения двух пар смежных приводов, а также коррекции этих расхождений в реальном масштабе времени.
Указанная коррекция позволяет минимизировать риски рассинхронизации различных приводов и, более того, разблокировать один или несколько неисправных приводов, в результате чего уменьшается опасность блокирования, деформации, а в более серьезных ситуациях - и поломки подвижного капота реверсора тяги.
Если оказывается, что предпринятые коррекции профилей скорости недостаточны, то есть, несмотря на эти коррекции, расхождения положений силовых цилиндров продолжают увеличиваться вплоть до перехода через пороговое значение Е3, то всю систему останавливают во избежание деформации или даже поломки подвижного капота реверсора тяги.
Потребность в реализации способа согласно изобретению тем более велика, что величины времени приведения в движение подвижного капота очень малы, так что система не в состоянии прийти в состояние квазиестественного равновесия.
Разумеется, изобретение никоим образом не ограничивается приведенным выше и продемонстрированным на чертежах вариантом осуществления и может быть, в частности, применено к подвижному капоту реверсора тяги, снабженному двумя или большим количеством приводов и состоящему при необходимости из двух подвижных полукапотов.
При управлении приводами подвижного капота реверсора тяги измеряют в реальном времени расхождение положений смежных приводов и изменяют профиль скорости соответствующего привода или приводов в зависимости от того, превышает ли расхождение положений некоторый заданный порог. Когда измерение показывает, что один из приводов запаздывает по отношению к другим, то выполняют ускорение этого привода или замедление других приводов. Когда измерение показывает, что один из приводов опережает другие приводы, выполняют замедление этого привода или ускорение других приводов. Изобретение позволяет исключить заклинивание или повреждение подвижного капота реверсора тяги за счет исключения рассинхронизации смежных приводов, осуществляющих его перемещение. 7 з.п. ф-лы, 10 ил.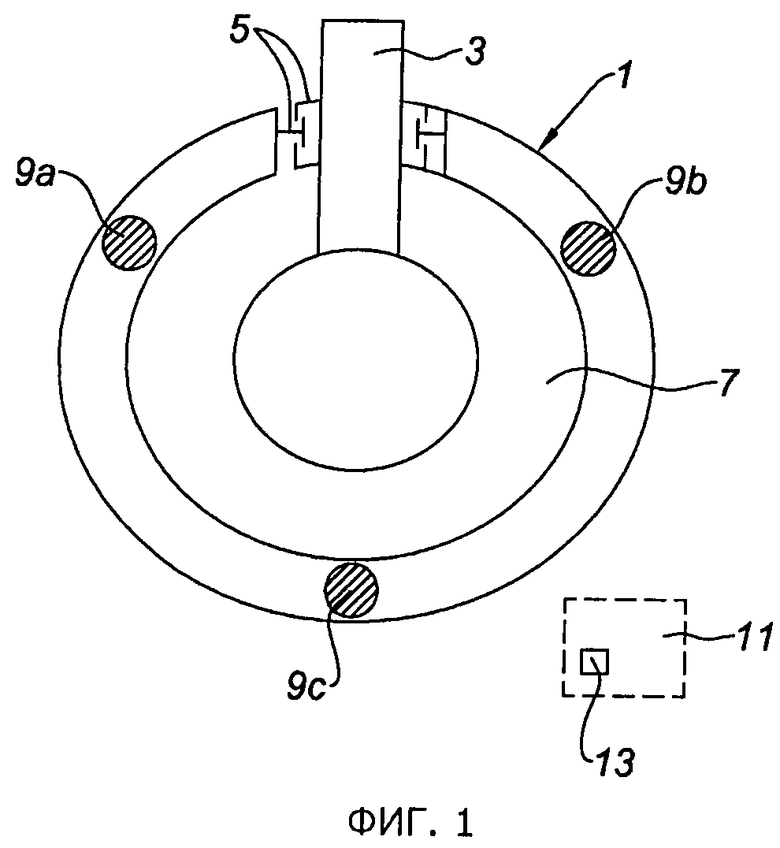
1. Способ управления несколькими приводами (9а, 9b, 9c) подвижного капота (1) реверсора тяги, отличающийся тем, что в реальном времени измеряют расхождение положений смежных приводов и изменяют профиль скорости (15) соответствующего привода или приводов в зависимости от того, превышает ли расхождение положений некоторый заданный порог (Е2).
2. Способ по п.1, отличающийся тем, что, когда указанное измерение показывает, что один из приводов (9а) запаздывает по отношению к другим приводам (9b, 9c), то выполняют ускорение этого привода (9а).
3. Способ по любому из пп.1 или 2, отличающийся тем, что, когда указанное измерение показывает, что один из приводов (9а) запаздывает по отношению к другим приводам (9b, 9c), выполняют замедление этих других приводов (9b, 9c).
4. Способ по любому из пп.1 или 2, отличающийся тем, что, когда указанное измерение показывает, что один из приводов (9c) опережает другие приводы (9а, 9b), выполняют замедление этого привода (9c).
5. Способ по п.1, отличающийся тем, что когда указанное измерение показывает, что один из приводов (9c) опережает другие приводы (9а, 9b), выполняют ускорение этих других приводов (9а, 9b).
6. Способ по любому из пп.2 или 5, отличающийся тем, что работой указанных других приводов управляют в шаговом режиме (15ab, 150c).
7. Способ по п.6, отличающийся тем, что пошаговые управляющие воздействия (150b, 150c) на указанные другие приводы выполняют в импульсном режиме.
8. Способ по любому из пп.1, 2, 5 или 7, отличающийся тем, что указанный подвижный капот (1) останавливают, если один из указанных приводов (9а, 9b, 9c) блокирован или если не удалось компенсировать запаздывание и/или опережение указанного привода или приводов по отношению к другим приводам.
| US 6771032 B2, 03.08.2004 | |||
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ РЕВЕРСОР ТЯГИ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ С СИСТЕМОЙ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СТВОРОК | 2003 |
|
RU2323360C2 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Способ управления переключателем направлений в АТС | 1952 |
|
SU96880A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| US 6439504 B1, 27.08.2002 | |||

