Область техники, к которой относится изобретение
Настоящее изобретение относится к реверсорам тяги в турбореактивном двигателе с потоками первичного и вторичного воздуха. В более узком аспекте изобретение относится к электромеханическому реверсору тяги, содержащему, по меньшей мере, два перемещаемых элемента, которые в открытом положении реверсора взаимодействуют для создания тяги реверса. Реверсор тяги по изобретению может быть решетчатым, створчатым или ковшовым.
Уровень техники
Реверсоры тяги, которыми оснащаются турбореактивные двигатели, использующие потоки первичного и вторичного воздуха, хорошо известны в авиации. Они служат для повышения безопасности самолета путем создания силы торможения во время его приземления (см., например, патенты RU 2145387, F02K 1/56, 07.05.1995; RU 2150595, F02K 1/72, 01.09.1997; RU 2150596, F02K 1/76, 10.03.1996).
Реверсоры тяги обычно выполнены в виде, по меньшей мере, двух подвижных элементов, таких как скользящие створки. Створки могут перемещаться относительно капота турбореактивного двигателя посредством силовых цилиндров управления таким образом, чтобы при работе в режиме реверса тяги, то есть в открытом положении, образовывать препятствие для части потока газов, исходящих из турбореактивного двигателя, направляя его вперед таким образом, чтобы создавать для самолета отрицательную тягу реверса (см., например, патент США №6439504, F02K 3/02, 27.08.2002, в котором описан ближайший аналог настоящего изобретения).
Перемещение скользящих створок обычно обеспечивается гидравлической системой управления. Такая система управления содержит в качестве основных компонентов гидроцилиндры управления створками реверсора тяги, гидравлический блок управления для подачи гидравлической жидкости под давлением в полости гидроцилиндров управления и гидравлические линии связи. Гидравлическая мощность, необходимая для питания системы управления этого типа, отбирается непосредственно от гидравлической системы самолета.
В ходе открытия и закрытия реверсора тяги обязательным условием является синхронизированное перемещение створок. Действительно, несинхронное перемещение створок ведет к созданию повышенных динамических напряжений на уровне реверсора тяги, которые могут вызвать серьезные повреждения реверсора тяги и турбореактивного двигателя. Плохая синхронизация перемещения створок вызывает неравномерное распределение усилий, прикладываемых к створкам, что ведет к значительному расхождению между их положениями. Кроме того, возможна ситуация, когда на створки действуют различные силы. В этом случае возможен риск деформации и повреждения реверсора тяги.
Для обеспечения возможности обнаруживать такое изменение во времени сил, действующих на реверсор тяги с гидравлическим управлением, и появление расхождения между силами, действующими на каждую створку, известно оснащение гидроцилиндров управления датчиками, измеряющими давление гидравлической жидкости в полостях гидроцилиндров. При этом посредством сравнения значений давления, измеренных этими датчиками, можно обнаруживать временные изменения сил, действующих на реверсор тяги, и возможное расхождение между силами, действующими на каждую створку, для того, чтобы избежать любой деформации реверсора тяги, ведущей к расхождению между положениями створок.
Для реверсоров тяги, использующих технологию гидравлического управления, характерны неудобства, которые связаны со сложностью и громоздкостью выполнения различных гидравлических систем. Действительно, прокладка гидравлических связей системы является сложной и тонкой операцией в условиях ограниченного пространства, имеющегося на передней раме реверсора тяги. Другое неудобство этой технологии состоит в использовании гидравлической жидкости, опасной в отношении коррозионных свойств и воспламенения. Кроме того, использование датчиков давления для обнаружения и корректировки с целью устранения возможной блокировки или заклинивания створок не позволяет отслеживать эволюционные изменения реверсора тяги в процессе эксплуатации с тем, чтобы предвидеть любое ухудшение его характеристик и/или старение.
Раскрытие изобретения
Задача, на которой направлено настоящее изобретение, заключается в устранении указанных недостатков за счет создания менее громоздкого электромеханического реверсора тяги, который позволяет одновременно обнаруживать и выполнять корректировку в отношении возможного изменения сил, действующих на реверсор тяги, и возможного расхождения между силами, действующими на каждую створку, для достижения синхронизации их перемещения с высокой точность.
В соответствии с изобретением для решения поставленной задачи предлагается реверсор тяги для турбореактивного двигателя, содержащий две створки, выполненные с возможностью перемещения между положениями, соответствующими открытому и закрытому положениям реверсора тяги, посредством, по меньшей мере, одного силового цилиндра управления. Реверсор по изобретению характеризуется тем, что дополнительно содержит два электродвигателя, каждый из которых взаимодействует, по меньшей мере, с одним силовым цилиндром управления каждой створкой и управляется электронным блоком управления, связанным с электронным вычислительным устройством управления с полной ответственностью. Реверсор содержит также два средства автоматического регулирования перемещения каждой створки по командам задания положения, обеспечивающие синхронизированное перемещение указанных створок с учетом возможного изменения сил, действующих на реверсор тяги, и возможного расхождения между силами, действующими на каждую створку.
Средства автоматического регулирования предпочтительно содержат средства вычисления изменения сил, действующих на реверсор тяги, и средства компенсации этого изменения сил. Предпочтительно средства вычисления изменения сил содержат средства вычисления производных по времени скоростей вращения каждого из электродвигателей, средства вычисления производных по времени токов возбуждения, питающих каждый из электродвигателей, и средство вычисления изменения сил, действующих на реверсор тяги, исходя из результатов вычисления производных скоростей вращения и токов возбуждения для каждого из указанных электродвигателей.
Таким образом, средства автоматического регулирования по изобретению позволяют обнаруживать возможные изменения сил, действующих на реверсор тяги, и компенсировать эти изменения. Когда такое изменение обнаружено, изобретение позволяет компенсировать его для того, чтобы произвести регулирование скорости перемещения створок. Эта компенсация осуществляется посредством воздействия на ток возбуждения каждого из электродвигателей с учетом результата расчета изменения сил. Для этой цели средства компенсации изменения сил, действующих на реверсор тяги, содержат средство для воздействия на ток возбуждения каждого из электродвигателей.
В то же время средства автоматического регулирования предпочтительно содержат средства вычисления расхождения между силами, действующими на каждую створку, и средства корректировки указанного расхождения между силами. Вычисление расхождения между силами осуществляется на основе сравнения производных по времени токов возбуждения каждого из электродвигателей.
Таким образом, средства автоматического регулирования по изобретению позволяют также обнаруживать возможное расхождение между силами, действующими на каждую створку реверсора тяги для синхронизации перемещения шторок. Действительно, расхождение между указанными силами может вызывать риск деформации, а следовательно, и повреждения реверсора тяги. Средства автоматического регулирования позволяют корректировать такое расхождение путем воздействия либо на ток возбуждения, либо на скорость вращения каждого из электродвигателей.
Средства вычисления расхождения между силами, действующими на каждую створку, предпочтительно содержат средства вычисления производных по времени токов возбуждения, питающих каждый из электродвигателей, средство сравнения производных по времени токов возбуждения указанных электродвигателей и средство вычисления указанного расхождения сил на основе сравнения производных по времени токов возбуждения каждого электродвигателя.
В предпочтительном варианте средства корректировки расхождения сил содержат средство для воздействия на ток возбуждения или на скорость вращения каждого из указанных электродвигателей.
В еще одном варианте средства автоматического регулирования содержат средства измерения скорости вращения каждого из электродвигателей и средства измерения тока возбуждения, питающего каждый из указанных электродвигателей.
В дальнейшем предпочтительном варианте средства автоматического регулирования дополнительно содержат средства для выработки команды задания скорости вращения и команды задания тока возбуждения для каждого из указанных электродвигателей в зависимости от рассогласования между действительным положением створок и положением, заданным вычислительным устройством управления с полной ответственностью.
В наиболее предпочтительном варианте средства автоматического регулирования дополнительно содержат средства измерения действительного положения створок.
Перечень чертежей
Другие свойства и достоинства настоящего изобретения станут ясны из нижеследующего описания, содержащего ссылки на прилагаемые чертежи, которые иллюстрируют пример осуществления изобретения, не вносящий каких-либо ограничений. На чертежах:
фиг.1 представляет собой схему, иллюстрирующую пример выполнения реверсора тяги по изобретению,
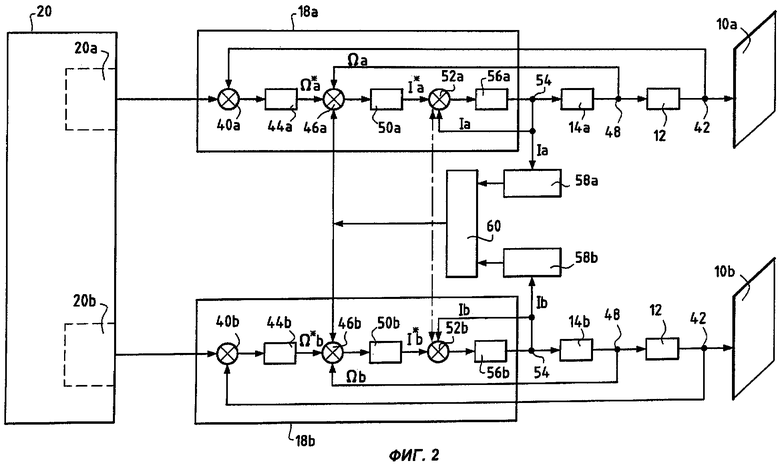
фиг.2 представляет собой частичную функциональную схему реверсора тяги в примере выполнения по фиг.1.
Осуществление изобретения
Пример выполнения реверсора тяги в соответствии с изобретением показан на фиг.1.
Реверсор тяги содержит две створки 10а, 10b, каждая их которых может перемещаться между открытым и закрытым положениями посредством, по меньшей мере, одного силового цилиндра 12 управления (на фиг.1 представлен вариант с тремя силовыми цилиндрами управления - один центральный силовой цилиндр и два силовых цилиндра, расположенных на двух боковых краях каждой створки).
Кроме того, реверсор тяги содержит два электродвигателя 14а, 14b, каждый из которых управляет перемещением одной створки. Эти электродвигатели связаны с силовыми цилиндрами 12 управления каждой створкой 10а, 10b с помощью передаточных валов 16, связывающих между собой силовые цилиндры управления каждой створкой.
Каждый электродвигатель 14а, 14b установлен непосредственно на электронном блоке 18а, 18b управления, который управляет всей последовательностью перемещения двух створок и регулирует скорость вращения электродвигателя. Каждый электронный блок 18а, 18b управления имеет электрическую связь с одним из двух каналов 20а, 20b связи электронного вычислительного устройства 20 управления с полной ответственностью, известного под названием FADEC (Full Authority Digital Engine Control). Порядок выдвижения или втягивания реверсора тяги передается вычислительным устройством FADEC электронным блокам 18а, 18b управления. Возможен также вариант, когда электронные блоки 18а, 18b управления встроены в вычислительное устройство FADEC.
Электропитание электронных блоков 18а, 18b управления осуществляется по электрической шине 22, подсоединенной к электрической сети 24 самолета, на котором установлен турбореактивный двигатель. Электронные блоки управления преобразуют электрический сигнал, адаптируя его для питания электродвигателей 14а, 14b.
Силовые цилиндры 12 управления створками реверсора тяги являются силовыми цилиндрами электромеханического типа. Они приводятся коробками 26 передач, установленными на каждом силовом цилиндре. Закон управления (по скорости или в двоичном режиме "включено-выключено") створками 10а, 10b реверсора тяги передается от электронных блоков управления на каждый силовой цилиндр 12 управления через посредство электродвигателей 14а, 14b, передаточных валов 16 и коробок 26 передач (называемых также приводными коробками).
Для обеспечения возможности ручного управления створкой, связанной с силовым цилиндром управления, в частности во время операций по техническому обслуживанию реверсора тяги, на уровне одного из силовых цилиндров 12 управления может быть предусмотрено приводное устройство 28. В показанном на фиг.1 примере выполнения центральный силовой цилиндр 12 управления оснащен таким приводным устройством 28 на уровне своей приводной коробки 26. Поскольку коробки передач (приводные коробки) каждой створки связаны между собой, это приводное устройство позволяет оператору по обслуживанию производить управление открытием и/или закрытием створок реверсора тяги, например, с помощью одной рукоятки. Доступ к приводному устройству 28 каждой створки может быть электрически связан с электронным блоком 18а, 18b управления таким образом, чтобы прерывать электропитание во время операций по обслуживанию с тем, чтобы избежать всякого риска несвоевременного выдвижения реверсора тяги.
Кроме того, электронные блоки 18а, 18b управления могут обмениваться данными между собой по линии 30 электрической связи типа шины. Этот обмен данными между двумя электронными блоками управления позволяет, в частности, обеспечить сравнение информации о текущих положениях двух створок. Для облегчения синхронизации перемещения двух створок могут быть предусмотрены механическая связь 32 между двумя створками 10а, 10b и гибкий вал 34 синхронизации, соединяющий между собой силовые цилиндры каждой створки.
Реверсор тяги содержит три уровня фиксации, что позволяет обеспечивать независимое удерживание реверсора тяги.
Первый уровень фиксации выполняется механическим фиксирующим устройством 36, называемым первичным фиксатором, который связан с каждой створкой реверсора тяги. Каждый первичный фиксатор установлен непосредственно на электродвигателе 14а, 14b. Эти первичные фиксаторы 36 позволяют обеспечивать независимую фиксацию створок, с которыми они связаны. В качестве примера они могут быть выполнены в виде дискового тормоза или блокирующего устройства, препятствующего движению передаточного вала.
С учетом того, что две створки связаны механически посредством связей 32 и 34, первичный фиксатор 36 одной из створок соответствует второму уровню фиксации для другой створки, для которой он соответственно образует вторичный фиксатор. Вторичный фиксатор предназначен для обслуживания соответствующей створки в случае отказа первичного фиксатора. Таким образом, если фиксатор одной из створок рассматривать как первичный фиксатор, фиксатор другой створки может рассматриваться как вторичный фиксатор, и наоборот.
Третий уровень фиксации обеспечивается упорным фиксатором 38 (см. фиг.1), называемым третичным фиксатором, который расположен на боковом краю каждой створки 10а, 10b или одной створки. Эти третичные фиксаторы могут быть связаны с электронными блоками 18а, 18b управления, с вычислительным устройством FADEC и/или непосредственно с кабиной самолета, с тем чтобы обеспечивать достаточную безопасность функционирования в различных типовых ситуациях. Действительно, будучи связанными с устройством FADEC или с кабиной самолета, третичные фиксаторы остаются действующими даже в случае отказа электронных блоков 18а, 18b управления. Они позволяют осуществить управление створками реверсора тяги в случае отказа первичного и вторичного фиксаторов.
Кроме того, реверсор тяги по изобретению содержит средства автоматического регулирования перемещения каждой из створок 10а, 10b по командам задания предварительно определенных положений. Эти средства автоматического регулирования позволяют обеспечивать синхронизированное перемещение створок с учетом как возможного колебания или изменения во времени сил, которые действуют на реверсор тяги и воспринимаются индивидуально на уровне каждой створки, так и возможного расхождения между этими силами, которое может существовать между двумя створками.
Силы, действующие на реверсор тяги, изменяются на всем протяжении процесса выдвижения или втягивания его створок, так что крутящий момент, развиваемый каждым электродвигателем для преодоления этих сил, не является постоянным в ходе перемещения створок. Эти действующие на реверсор тяги силы включают в себя, в частности, аэродинамические силы, силы трения и силы, обусловленные возможным постепенным ухудшением характеристик реверсора тяги. Средства автоматического регулирования по изобретению позволяют обнаруживать возможное колебание этих сил и при наличии такого колебания компенсировать его. С учетом того, что крутящий момент, развиваемый каждым электродвигателем, пропорционален его току возбуждения, средства автоматического регулирования воздействуют на ток возбуждения в цепи автоматического регулирования (как это будет описано подробно далее со ссылкой на фиг.2) для преодоления сил, действующих на реверсор тяги.
Электронное вычислительное устройство 20 управления с полной ответственностью подает команду открытия или закрытия реверсора тяги по цепи автоматического регулирования. Когда эта команда (т.е. команда задания положения) получена, первый компаратор 40а, 40b, которым оснащен каждый электронный блок 18а, 18b управления, анализирует рассогласование между положением, заданным устройством 20 FADEC, и текущим (действительным) положением каждой створки. Действительное положение каждой створки измеряется, например, датчиком 42 положения, расположенным на выходе одного из двух силовых цилиндров 12 привода створки.
Каждый электронный блок 18а, 18b управления содержит первый корректирующий блок 44а, 44b, функционирующий в качестве средств для выработки команды задания скорости вращения, который подает команду задания скорости Ω*a, Ω*b вращения для каждого электродвигателя 14а, 14b, если существует рассогласование между заданным положением и измеренным положением каждой створки реверсора тяги.
За первым корректирующим блоком в цепи автоматического регулирования расположен второй компаратор 46а, 46b, который позволяет сравнить для каждого электродвигателя 14а, 14b заданную скорость Ω*a, Ω*b вращения, выработанную первым корректирующим блоком 44а, 44b, и действительную скорость Ωa, Ωb вращения, измеренную на уровне оси вращения электродвигателя 14а, 14b. Измерение скорости Ωa, Ωb вращения каждого электродвигателя 14а, 14b производится датчиком типа «резольвера» (resolver) (датчиком вращения) 48, служащим в качестве средств измерения скорости вращения каждого электродвигателя, или, например, акустическим датчиком.
Когда имеется рассогласование между заданной скоростью Ω*a, Ω*b вращения и измеренной скоростью Ωa, Ωb вращения каждого электродвигателя, второй корректирующий блок 50а, 50b, функционирующий в качестве средств вычисления производных по времени скоростей вращения каждого электродвигателя, позволяет вычислить производную по времени измеренной скорости вращения для каждого двигателя. Эта производная скорости вращения будет использована для вычисления возможного колебания момента сил, действующих на реверсор тяги.
Кроме того, каждый второй корректирующий блок 50а, 50b, служащий также в качестве средств для выработки команды задания тока возбуждения, вырабатывает команду задания тока I*a, I*b возбуждения питания каждого электродвигателя 14а, 14b, когда существует рассогласование между заданным положением, полученным от устройства 20 FADEC, и измеренным положением каждой створки реверсора тяги.
За вторым корректирующим блоком 50а, 50b в цепи автоматического регулирования установлен третий компаратор 52а, 52b, который позволяет сравнить для каждого электродвигателя 14а, 14b заданный ток I*a, I*b возбуждения, определенный описанным образом, и измеренный ток Ia, Ib возбуждения, который питает электродвигатели. Ток Ia, Ib возбуждения измеряется на входе каждого электродвигателя. В качестве примера средств измерения тока могут служить электроизмерительные клещи 54, служащие в качестве средств измерения тока возбуждения, питающего каждый электродвигатель.
Когда существует рассогласование между заданным током I*а, I*b возбуждения и измеренным током Ia, Ib возбуждения, третий корректирующий блок 56а, 56b, функционирующий в качестве средств вычисления производных по времени токов возбуждения, позволяет вычислить для каждого электродвигателя производную по времени измеренного тока возбуждения.
На основе изменения или колебания тока возбуждения можно вычислить возможное изменение или колебание момента сил, действующих на реверсор тяги.
Действительно, известно, что:

где γmoteur - крутящий момент, развиваемый каждым электродвигателем;
J - константа, соответствующая механической инерции реверсора тяги в целом;
d Ω/dt - производная по времени скорости вращения для каждого электродвигателя,
γresist - момент сил, действующих на реверсор тяги.
Таким образом, путем вычисления производной по времени членов уравнения (1) с помощью вычислительного устройства 58а, 58b, можно вычислить возможное изменение или колебание момента сил, действующих на реверсор тяги (этот момент сил соответствует dγresist/dt). Получение производных по времени в уравнении (1) записывается следующим образом:

где
производная (dγmoteur/dt) крутящего момента, развиваемого каждым электродвигателем 14а, 14b, пропорциональна производной измеренного тока Ia, Ib возбуждения, который питает соответствующий электродвигатель (вычисление производной этих токов производится третьим корректирующим блоком 56а, 56b);
механическая инерция J реверсора тяги является предварительно определенной константой,
ускорение d Ω/dt электродвигателей получено путем вычисления производной скорости вращения, выполняемого вторым корректирующим блоком 50а, 50b.
После вычисления указанным образом момента сил, действующих на реверсор тяги, необходимо обеспечить, чтобы электродвигатель 14а, 14b каждой створки развил крутящий момент для преодоления этих сил. Поскольку крутящий момент электродвигателя пропорционален питающему его току возбуждения, развитие двигателем крутящего момента для преодоления этих сил осуществляется простым корректирующим воздействием на ток возбуждения. Это воздействие, интенсивность которого вычисляется вычислительным устройством 58а, 58b, передается на уровень третьего компаратора 52а, 52b каждого электронного блока 18а, 18b управления.
С другой стороны, средства автоматического регулирования перемещения створок реверсора тяги в соответствии с изобретением позволяют выявить и скорректировать возможное расхождение между силами, действующими на каждую створку. Такое расхождение может реально существовать на практике. В этом случае силы, действующие на две створки, различны, что связано с риском деформации, а, следовательно, и повреждения реверсора тяги. Вследствие этого важно сравнить токи Ia, Ib возбуждения, питающие каждый электродвигатель 14а, 14b, для того, чтобы модифицировать команду задания скорости Ω*a, Ω*b вращения или команду задания тока I*a, I*b возбуждения, подаваемую на один из этих двигателей для его замедления (или ускорения). В результате этого действия расхождение между положениями двух створок будет уменьшено; тем самым будет облегчена синхронизация перемещения створок и снижен риск деформации реверсора тяги.
Исходя из уравнения (2) и зная, что крутящий момент (γmoteur), развиваемый каждым электродвигателем, пропорционален току возбуждения (т.е. I=k×γmoteur), можно показать, что производная по времени тока возбуждения для каждого электродвигателя записывается уравнением:

Кроме того, при условии, что для обеспечения синхронизации перемещения створок реверсора тяги два электродвигателя 14а, 14b вращаются, по существу, с одинаковой скоростью, можно вывести следующее соотношение:

Следовательно, при сравнении производных тока возбуждения для каждого электродвигателя из уравнений (3) и (4) получаем:

где через (dγresist/dt)a и (dγresist/dt)b обозначены изменения сил, действующих на каждую створку реверсора тяги.
Подобным же образом посредством сравнения производных тока возбуждения для каждого электродвигателя определяют возможное расхождение между силами, действующими на каждую створку реверсора тяги. Таким образом, появляется возможность выявить ситуацию, когда на створки действуют различные силы. Вычисление каждой производной тока возбуждения выполняется третьим корректирующим блоком 56а, 56b каждого электронного блока 18а, 18b управления, а их сравнение производится на уровне компаратора 60, служащего в качестве средств сравнения производных по времени токов возбуждения электродвигателей и вычисления указанного расхождения сил на основе сравнения производных по времени токов возбуждения каждого электродвигателя.
После обнаружения указанным образом расхождения между силами, действующими на каждую створку, необходимо произвести желаемое корректирующее воздействие в отношении одной или двух створок. Так, например, корректирующее воздействие может выражаться либо в полной остановке системы реверсора тяги, либо в возврате створок назад, либо в обратном отводе створок на несколько сантиметров и затем повторном их перемещении в первоначально желаемом направлении. Выбор конкретного корректирующего воздействия предоставляется специалисту по конструкции капотов. Может быть также продолжено перемещение створок в прерывистом режиме.
Корректирующее воздействие может быть реализовано на уровне контура автоматического регулирования скоростью вращения электродвигателей с помощью второго компаратора 46а, 46b каждого электронного блока управления. Оно может быть также реализовано на уровне контура автоматического регулирования тока возбуждения электродвигателей с помощью третьего компаратора 52а, 52b (как показано штриховой линией на фиг.2).
Таким образом, каждый электронный блок 18а, 18b управления обеспечивает автоматическое следящее регулирование положения створок 10а, 10b. Это позволяет добиться синхронизации перемещения створок с высокой точностью в соответствии с командой задания положения, исходящей от вычислительного устройства 20 управления с полной ответственностью, с учетом как возможных изменений или колебаний сил, действующих на реверсор тяги, так и возможного расхождения между силами, действующими на каждую створку.
В описанном выше варианте изобретения средства автоматического регулирования перемещения каждой из створок, различные компараторы (40а, 40b, 46а, 46b и 52а, 52b) и корректирующие блоки (44а, 44b, 50а, 50b и 56а, 56b) выполнены в виде программируемых средств известного типа, а данные, обрабатываемые этими программируемыми средствами (скорость вращения и ток возбуждения), имеют форму цифровых данных. Аналогичным образом вычислительное устройство 58а, 58b и компаратор 60 производных тока возбуждения также представляют собой программируемые средства. Использование программируемых средств для осуществления автоматического регулирования перемещения створок в соответствии с настоящим изобретением обеспечивает очень большую гибкость выполнения контуров автоматического регулирования скорости вращения и тока возбуждения.
Таким образом, изобретение дает множество преимуществ, в частности, в отношении способности обнаруживать и корректировать возможные отклонения сил, действующих на реверсор тяги, для того, чтобы избежать любой деформации последнего. Эта функция позволяет также защитить реверсор тяги для сохранения его целостности, в особенности в проблемной ситуации. Изобретение позволяет также выявлять, благодаря вычислению момента сил, потенциальную возможность блокировки или заклинивания реверсора тяги. Кроме того, вычисление момента сил позволяет определить изменения реверсора тяги в процессе срока службы, чтобы предвидеть любое ухудшение его эксплуатационных характеристик и/или старение. В более общем плане изобретение позволяет повысить надежность и безопасность реверсора тяги.
Изобретение относится к турбореактивным двигателям. Реверсор тяги для турбореактивного двигателя, содержащий две створки (10а, 10b), выполненные с возможностью перемещения между положениями, соответствующими открытому и закрытому положениям реверсора, посредством, по меньшей мере, одного силового цилиндра (12) управления, два электродвигателя (14а, 14b), каждый из которых связан, по меньшей мере, с одним силовым цилиндром управления каждой створкой. Каждый электродвигатель управляется электронным блоком (18а, 18b) управления, связанным с электронным вычислительным устройством (20) управления с полной ответственностью, при этом предусмотрены два средства автоматического регулирования перемещения каждой створки по командам задания их положений. Эти средства автоматического регулирования позволяют обеспечивать синхронизированное перемещение створок с учетом возможного изменения сил, действующих на реверсор тяги, и возможного расхождения между силами, действующими на каждую створку. Изобретение обеспечивает повышение надежности и безопасности реверса тяги. 9 з.п. ф-лы, 2 ил.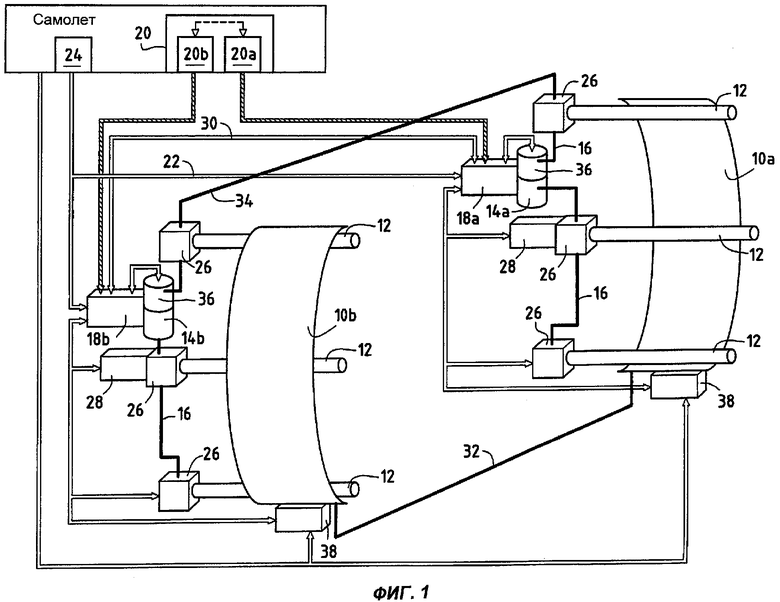
| US 6439504 А, 27.08.2002 | |||
| РЕВЕРСОР ТЯГИ С РЕШЕТКАМИ И РАБОЧИМ ЦИЛИНДРОМ ОПТИМИЗИРОВАННОГО УПРАВЛЕНИЯ | 1998 |
|
RU2150595C1 |
| СПОСОБ И УСТРОЙСТВО ЗАКРЫВАНИЯ ЗАСЛОНКИ РЕВЕРСОРА ТЯГИ | 1997 |
|
RU2150596C1 |
| Устройство для электрохимического хонингования отверстий | 1984 |
|
SU1284750A1 |
| СПОСОБ ПОСЛЕДОВАТЕЛЬНОЙ ДЕЗАКТИВАЦИИ РАДИОАКТИВНЫХ РАСТВОРОВ | 2021 |
|
RU2769953C1 |
| Способ определения прочностных и деформативных характеристик горной породы и установка для его осуществления | 1984 |
|
SU1236344A1 |

