Изобретение относится к области измерительной техники и может служить для измерения высоты самолета при посадке, парковки автомобиля у стены, стыковки космических аппаратов и др.
Известны самолетные барометрические высотомеры, основанные на измерении атмосферного давления [1]. Их основными недостатками являются невысокая точность и измерение не абсолютной, а относительной высоты полета, например, относительно уровня моря.
Прототипом предлагаемого видеовысотомера служит известный радиовысотомер малых высот РВ-5, содержащий передатчик излучения, приемник излучения и цифровой индикатор [2]. Основными недостатками прототипа являются невысокая точность, характеризуемая погрешностью измерения высоты ±0,8 м в диапазоне 0-10 м и ±0,8% в диапазоне 10-750 м, а также напряженное внимание, требуемое от пилота для восприятия быстро меняющейся цифровой информации на индикаторе при посадке самолета.
Целью настоящего изобретения является устранение недостатков, присущих прототипу, путем повышения точности измерения высоты, снижения степени напряженности пилота для восприятия визуальной информации и предоставления дополнительной информации о параметрах полета, что в совокупности повышает ее безопасность.
Предлагаемый видеовысотомер, содержащий передатчик излучения, приемник излучения и индикатор, в отличие от прототипа и в соответствии с изобретением передатчик излучения выполнен в виде двух параллельных линейных источников света, создающих на поверхности, до которой измеряется высота, две параллельные световые полосы, между источниками света установлен приемник излучения, выполненный в виде телекамеры с объективом и позиционно-чувствительной матрицей приемников света, в поле зрения которой находится поверхность с двумя параллельными световыми полосами, а индикатор выполнен в виде видеомонитора, на краях экрана которого нанесены две неподвижные параллельные линии, между которыми располагаются две подвижные параллельные им линии, являющиеся изображениями двух параллельных световых полос на поверхности, до которой измеряется высота.
Изобретение поясняется фиг.1, на которой изображены видеомонитор 1, подключенный к телекамере 2, содержащей позиционно-чувствительную матрицу приемников света 3 (ПЗС-матрицу) и объектив 5, линейные источники света 4 и 6, создающие на поверхности 7, до которой измеряется высота, две параллельные световые полосы 8 и 9.
На экране видеомонитора 1 нанесены две неподвижные параллельные линии 10 и 13, между которыми располагаются две подвижные, параллельные им линии 11 и 12, являющиеся изображениями двух световых полос 8 и 9 в видеокадре.
Источники света 4 и 6 и телекамера 2 уставлены под днищем самолета так, что в поле зрения телекамеры 2 находится поверхность 7 с двумя параллельными световыми полосами 8 и 9, созданными двумя источниками света 4 и 6, расстояние между которыми рассчитывается по формуле:
где М - эффективный размер позиционно-чувствительной матрицы приемников света, f - фокусное расстояние объектива телекамеры, Н0 - «нулевая» высота. Работа видеовысотомера состоит в следующем.
На больших высотах подвижные линии 11 и 12 располагаются в середине экрана видеомонитора 1.
С уменьшением высоты полета самолета подвижные линии 11 и 12 перемещаются к краям экрана видеомонитора и в момент посадки самолета при горизонтальном полете над горизонтальной поверхностью совмещаются с неподвижными линиями 10 и 13. При посадке с креном подвижные линии 11 и 12 смещаются в сторону крена, что служит дополнительной информацией для пилота. Кроме того, пилот на экране видеомонитора наблюдает поверхность, на которую совершает посадку.
Текущая (на момент измерения) высота вычисляется по формуле:
где С - константа, определяемая на основе калибровочных измерений, S - расстояние между подвижными линиями на экране видеомонитора.
Согласно формуле погрешность видеовысотомера непостоянна и уменьшается с уменьшением высоты, что наилучшим образом способствует решению задачи повышения точности измерений при посадке самолета без необходимости переключения диапазонов измерений, как это сделано в прототипе.
Если принять расстояние между линейными источниками света L=250 мм, фокусное расстояние объектива телекамеры f=50 мм, то при эффективном размере позиционно-чувствительной матрицы приемников света М=6,4 мм (матрица 1/2 дюйма) «нулевая» высота (высота в момент посадки самолета) составит Н0≈2000 мм. При ширине экрана видеомонитора 200 мм и погрешности совмещения подвижных линий 11 и 12 с неподвижными 10 и 13 в пределах 1 мм, что легко визуально фиксируется, относительная погрешность видеовысотомера составляет 1/100. При этом абсолютная погрешность измерения «нулевой» высоты в момент посадки самолета составляет 20 мм.
Изменением расстояния между линейными источниками света, фокусного расстояния объектива телекамеры и эффективного размера позиционно-чувствительной матрицы приемников света можно устанавливать любую необходимую «нулевую» высоту, что позволяет использовать видеовысотомер на различных типах самолетов и других летательных средств.
Таким образом, в предлагаемом видеовысотомере в сравнении с прототипом существенно повышается точность измерения высоты при посадке самолета, снижается степень напряжения пилота для восприятия визуальной информации с экрана видеомонитора и создаются дополнительные возможности для определения крена самолета и наблюдения поверхности, на которую совершается посадка, что в совокупности повышает безопасность полета.
Видеовысотомер может успешно использоваться в атмосфере, в водной или иной оптически прозрачной среде, а также в космосе.
Важным фактором для производства видеовысотомера является то, что он комплектуется из типовых узлов (полупроводниковый лазер, модульная телекамера, видеомонитор), которые производятся в массовом количестве, характеризуются высокой надежностью и широко представлены на современном рынке товаров и услуг.
Источники информации
1 Волкоедов А.П., Паленый Э.Г. Оборудование самолета. М.: Машиностроение, 1980 г., стр.126-128.
2 Волкоедов А.П., Паленый Э.Г. Оборудование самолета. М.: Машиностроение, 1980 г., стр.128-131.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИДЕОАВТОКОЛЛИМАЦИОННЫЙ УГЛОМЕР | 2014 |
|
RU2583126C1 |
| ВИДЕОНАКЛОНОМЕР | 2009 |
|
RU2419071C1 |
| ВИДЕОУСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ЗАДАННОГО НАПРАВЛЕНИЯ С ОДНОГО ГОРИЗОНТА НА ДРУГОЙ | 2014 |
|
RU2583059C1 |
| ВИДЕОУСТРОЙСТВО ДЛЯ КОНТРОЛЯ НЕРОВНОСТЕЙ ВНУТРЕННЕЙ ВЕРТИКАЛЬНОЙ ЦИЛИНДРИЧЕСКОЙ ПОВЕРХНОСТИ | 2009 |
|
RU2425327C1 |
| ВИДЕОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ НЕРОВНОСТЕЙ ВНУТРЕННЕЙ ВЕРТИКАЛЬНОЙ ЦИЛИНДРИЧЕСКОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2584370C2 |
| КООРДИНАТОМЕР СТРУНЫ ОБРАТНОГО ОТВЕСА | 2009 |
|
RU2398187C1 |
| ДАТЧИК ДАВЛЕНИЯ ЖИДКОСТИ В РЕЗЕРВУАРЕ | 2005 |
|
RU2301412C2 |
| ВИДЕОАВТОКОЛЛИМАТОР | 2010 |
|
RU2455668C2 |
| ВИДЕОРЕФРАКТОМЕТР | 2006 |
|
RU2315286C1 |
| ВИДЕОДАТЧИК ДЛЯ ИЗМЕРЕНИЯ УРОВНЯ ЖИДКОСТИ В СОСУДАХ ГИДРОСТАТИЧЕСКОГО НИВЕЛИРА | 2019 |
|
RU2730382C1 |
Изобретение относится к измерительной технике и самолетной авионике. Видеовысотомер содержит передатчик излучения, выполненный в виде двух параллельных линейных источников света, приемник излучения, выполненный в виде телекамеры с объективом и позиционно-чувствительной матрицей приемников света, а также видеовысотомер содержит индикатор, выполненный в виде видеомонитора. Технический результат - повышение точности измерения высоты полета. 1 ил.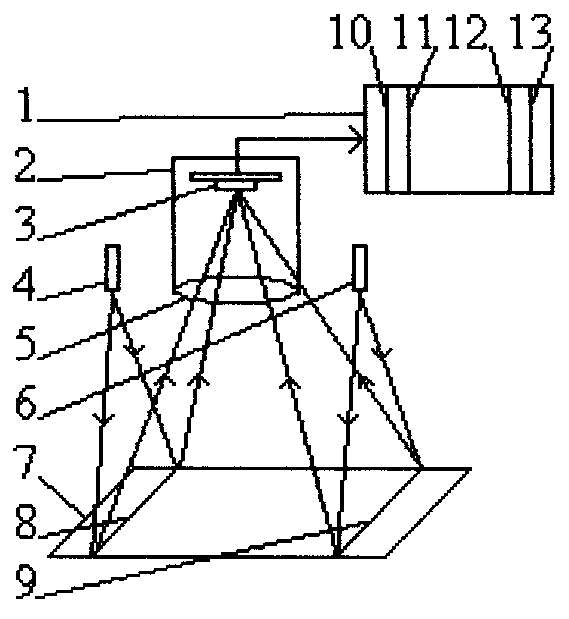
Видеовысотомер, содержащий передатчик излучения, приемник излучения и индикатор, отличающийся тем, что передатчик излучения выполнен в виде двух параллельных линейных источников света, создающих на поверхности, до которой измеряется высота, две параллельные световые полосы, между источниками света установлен приемник излучения, выполненный в виде телекамеры с объективом и позиционно-чувствительной матрицей приемников света, в поле зрения которой находится поверхность с двумя параллельными световыми полосами, а индикатор выполнен в виде видеомонитора, на краях экрана которого нанесены две неподвижные параллельные линии, между которыми располагаются две подвижные параллельные им линии, являющиеся изображениями двух параллельных световых полос на поверхности, до которой измеряется высота, при этом расстояние между линейными источниками света рассчитывается по формуле:
 ,
,
где М - эффективный размер позиционно-чувствительной матрицы приемников света, f - фокусное расстояние объектива телекамеры, Н0 - «нулевая» высота.
| RU 2058556 C1, 20.04.1996 | |||
| 1972 |
|
SU415489A1 | |
| Многозаходная червячная передача | 1951 |
|
SU95124A1 |
| US 20090093959, 09.04.2009 | |||

