Изобретение относится к области измерительной техники и может служить для бесконтактного автоматизированного контроля неровностей внутренней вертикальной цилиндрической поверхности, например ракетной шахты.
Известно устройство для контроля внутренней поверхности труб (РВП-457), содержащее кольцевой осветитель и систему визуального наблюдения [1].
Известно устройство для контроля внутренней поверхности тел, содержащее кольцевой осветитель с фоконом и систему визуального наблюдения с промышленной телевизионной установкой [2].
Известно устройство, содержащее установленные с двух сторон и внутри контролируемой поверхности оптически связанные между собой кольцевой источник света, отражатель и фотоприемник на основе многоэлементной двумерной матрицы, выходной сигнал которого обрабатывается в регистрирующем устройстве [3].
Известно устройство для контроля неровностей внутренней вертикальной цилиндрической поверхности, содержащее телекамеру с ПЗС-матрицей, кольцевой источник света и ряд других узлов [4].
Недостатком первых двух устройств является визуальный съем информации, что приводит к ошибкам оператора.
Недостатком третьего устройства является расположение узлов с двух торцов контролируемой поверхности, что не приемлемо, например, для измерений в ракетной шахте.
Недостатком четвертого устройства является очень сложная конструкция, содержащая много узлов.
Наиболее близким к заявленному изобретению по совокупности признаков (прототипом) является видеоустройство для контроля неровностей внутренней вертикальной цилиндрической поверхности [5], содержащее неподвижную телекамеру, закрепляемую в верхней части контролируемой поверхности, и корпус, перемещаемый внутри этой поверхности, на корпусе закреплены визирные марки, находящиеся в поле зрения неподвижной телекамеры, в корпусе за верхним и нижним кольцевыми окнами установлены соответственно вторая телекамера и кольцевой источник света, причем в поле зрения второй телекамеры находится контролируемая поверхность, освещенная узким светом кольцевого источника света.
Основным недостатком прототипа является зависимость точности измерений от высотного положения корпуса внутри контролируемой поверхности и от оптических искажений объектива телекамеры, установленной в корпусе.
Целью настоящего изобретения является повышение точности измерений путем устранения недостатков, присущих прототипу.
Сложность задачи состоит в том, что при перемещении корпуса внутри контролируемой поверхности он может смещаться и поворачиваться относительно начального положения и это необходимо учитывать, чтобы избежать соответствующих погрешностей измерений.
Предлагаемое видеоизмерительное устройство для контроля неровностей внутренней вертикальной цилиндрической поверхности, содержащее телекамеру и экран, неподвижно закрепляемые над контролируемой поверхностью, и перемещаемый внутри этой поверхности корпус с закрепленными на нем визирными марками, находящимися в поле зрения телекамеры, в отличие от прототипа и в соответствии с изобретением в корпусе установлена вертикальная полая ось и связанные с ней шаговый двигатель и датчик угла, внутри полой оси установлен лазерный дальномер, на полой оси закреплено вращаемое зеркало и параллельно с ним, когда оно находится в исходном положении, установлено неподвижное зеркало, при этом, когда вращаемое зеркало находится в исходном положении, луч лазерного дальномера отклоняется в горизонтальном направлении на неподвижное зеркало, отклоняющее его в вертикальном направлении на экран, а при других положениях вращаемого зеркала луч лазерного дальномера направляется в горизонтальной плоскости на контролируемую поверхность.
Указанная цель в заявленном видеоизмерительном устройстве достигается тем, что измерение высоты корпуса внутри контролируемой поверхности и измерение радиусов точек этой поверхности осуществляются с помощью лазерного дальномера, характеризуемого неизменной точностью.
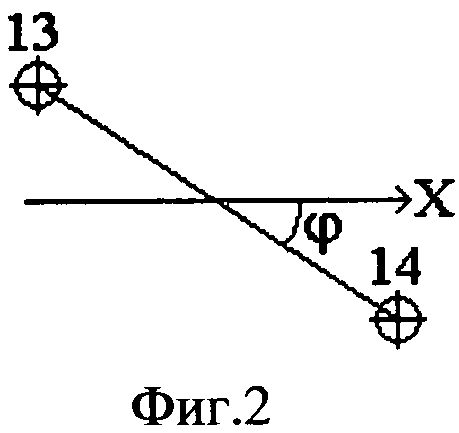
На фиг.1 показана схема предлагаемого видеоизмерительного устройства, содержащего телекамеру 1 и экран 2, закрепленные над контролируемой поверхностью 6, и корпус 5, перемещаемый внутри этой поверхности. На корпусе 5 установлены визирные марки 3 и 4, внутри корпуса установлены полая ось 11 с закрепленным на ней вращаемым зеркалом 7, неподвижное зеркало 8, лазерный дальномер 12 внутри полой оси 11, шаговый двигатель 9 и датчик угла 10, связанные с полой осью 11. В схеме также содержится компьютер, не показанный на фиг.1, в который поступают выходные сигналы телекамеры 1, датчика угла 10 и лазерного дальномера 12 и из которого передаются сигналы управления шаговым двигателем 9 и лазерным дальномером 12.
На фиг.2 показаны изображения 13 и 14 визирных марок 4 и 6 в видеокадре телекамеры 2, расположенные под углом φ к координатной оси X видеокадра.
Работа видеоизмерительного устройства состоит в следующем.
Корпус 5 устанавливается в верхнем фиксированном положении внутри контролируемой поверхности 6, в котором:
- на основе компьютерной обработки изображений 13 и 14 визирных марок 3 и 4 в видеокадре телекамеры 1 вычисляется верхний угол φB этих изображений;
- с помощью лазерного дальномера 12, вращаемого зеркала 7, находящегося в исходном положении, и неподвижного зеркала 8 луч лазерного дальномера 12 направляется на экран 2 и измеряется верхняя высота hB корпуса 5;
- на основе компьютерной обработки изображений 13 и 14 визирных марок 3 и 4 в видеокадре телекамеры 1 вычисляются координаты XB,YB общего центра этих изображений.
Корпус 5 устанавливается в нижнем фиксированном положении внутри контролируемой поверхности 6, в котором:
- на основе компьютерной обработки изображений 13 и 14 визирных марок 3 и 4 в видеокадре телекамеры 1 вычисляется нижний угол φH этих изображений и разность углов αH=φH-φB;
- с помощью лазерного дальномера 12, вращаемого зеркала 7, находящегося в исходном положении, и неподвижного зеркала 8 луч лазерного дальномера 12 направляется на экран 2 и измеряется нижняя высота hH корпуса 5;
- на основе компьютерной обработки изображений 13 и 14 визирных марок 3 и 4 в видеокадре телекамеры 1 и с учетом разности углов αH вычисляются координаты XH,YH общего центра этих изображений.
Корпус 5 устанавливается в заданном сечении контролируемой поверхности 6, в котором:
- на основе компьютерной обработки изображений 13 и 14 визирных марок 3 и 4 в видеокадре телекамеры 1 вычисляется текущий (на момент выполнения измерений) угол φ этих изображений и текущая разность углов α=φ-φB;
- с помощью лазерного дальномера 12, вращаемого зеркала 7, находящегося в исходном положении, и неподвижного зеркала 8 луч лазерного дальномера 12 направляется на экран 2 и измеряется текущая высота h корпуса 5;
- на основе компьютерной обработки изображений 13 и 14 визирных марок 3 и 4 в видеокадре телекамеры 1 и с учетом текущей разности углов α вычисляются текущие координаты X,Y общего центра этих изображений;
- решением уравнения прямой, соединяющей верхнюю с координатами hB,XB,YB и нижнюю с координатами hH,XH,YH точки, вычисляются текущие координаты Х0,Y0 точки этой прямой в видеокадре телекамеры 1;
- с учетом текущей разности углов α и текущими координатами X,Y вычисляются текущие смещения ΔX=X-Х0 и ΔY=Y-Y0 корпуса 5 в направлениях координатных осей видеокадра телекамеры 1;
- с помощью шагового двигателя 9 и датчика угла 10 вращаемое зеркало 7 поворачивается на фиксированный угол, при котором луч лазерного дальномера направляется на контролируемую поверхность 6, затем оно поворачивается с заданным угловым шагом и на каждом из n шагов измеряются текущие расстояния S1…Sn точек контролируемой поверхности 6;
- с учетом текущих расстояний S1…Sn, текущих смещений ΔX,ΔY и текущего угла поворота β вращаемого зеркала 7 вычисляются искомые радиусы точек контролируемой поверхности 6:

где S0 - константа («место нуля»), определяемая на основе калибровочных измерений.
Знак перед корнем определяется в зависимости от величины текущего угла β поворота вращаемого зеркала 7 и знаков текущих смещений ΔХ и ΔY.
Аналогично определяются радиусы точек в других сечениях контролируемой поверхности 6.
Измерения выполняются под управлением компьютерной программы в автоматическом режиме. Результаты измерений в виде цифрового образа контролируемой поверхности записываются в памяти компьютера.
Неровности контролируемой поверхности определяются на основе обработки цифрового массива данных, записанного в памяти компьютера.
Источники информации
1. Прибор смотровой РВП-457, техническое описание и инструкция по эксплуатации.
2. Патент SU №1793210 от 03.06.1991. Устройство для контроля внутренней поверхности тел.
3. Патент RU №2245516 от 15.04.2003. Устройство для контроля отверстий деталей.
4. Патент US №4899277 А от 06.02.1996. Bore hole scanner with position detecting device and light polarizers.
5. Патент RU №2425327 от 27.07.2011. Видеоустройство для контроля неровностей внутренней вертикальной цилиндрической поверхности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ОПТИЧЕСКОЙ ЛОКАЦИИ | 2014 |
|
RU2562391C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ ЛОКАТОР | 2014 |
|
RU2562750C1 |
| СПОСОБ ОПТИЧЕСКОЙ ЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2554108C1 |
| ВИДЕОСТВОРОФИКСАТОР | 2004 |
|
RU2275600C2 |
| ЛОКАЦИОННЫЙ ОПТИКО-ЭЛЕКТРОННЫЙ МОДУЛЬ | 2017 |
|
RU2653158C1 |
| Устройство для передачи направления подземных горных выработок с горизонта на горизонт через соединительный канал | 1983 |
|
SU1138496A1 |
| ТЕЛЕВИЗИОННО-ЛАЗЕРНЫЙ ВИЗИР-ДАЛЬНОМЕР | 2012 |
|
RU2515766C2 |
| ДАЛЬНОМЕРНО-ВИЗИРНЫЙ ПРИБОРНЫЙ КОМПЛЕКС | 2010 |
|
RU2437051C1 |
| ЛАЗЕРНЫЙ ЦЕНТРАТОР ДЛЯ РЕНТГЕНОВСКОГО ИЗЛУЧАТЕЛЯ | 2004 |
|
RU2261538C1 |
| ЛАЗЕРНЫЙ ЦЕНТРАТОР ДЛЯ РЕНТГЕНОВСКОГО ИЗЛУЧАТЕЛЯ | 2001 |
|
RU2204820C1 |
Изобретение относится к области измерительной техники и может служить для бесконтактного автоматизированного контроля неровностей внутренней вертикальной цилиндрической поверхности, например ракетной шахты. Видеоизмерительное устройство для контроля неровностей внутренней вертикальной цилиндрической поверхности содержит телекамеру и экран, неподвижно закрепляемые над контролируемой поверхностью, и перемещаемый внутри этой поверхности корпус с закрепленными на нем визирными марками, находящимися в поле зрения телекамеры. При этом в корпусе устройства установлена вертикальная полая ось и связанные с ней шаговый двигатель и датчик угла. Внутри полой оси установлен лазерный дальномер, на полой оси закреплено вращаемое зеркало и параллельно с ним, когда оно находится в исходном угловом положении, установлено неподвижное зеркало. Кроме того, когда вращаемое зеркало находится в исходном положении, луч лазерного дальномера отклоняется в горизонтальном направлении на неподвижное зеркало, отклоняющее его в вертикальном направлении на экран, а при других положениях вращаемого зеркала луч лазерного дальномера направляется в горизонтальной плоскости на контролируемую поверхность. Технический результат - повышение точности измерений. 2 ил.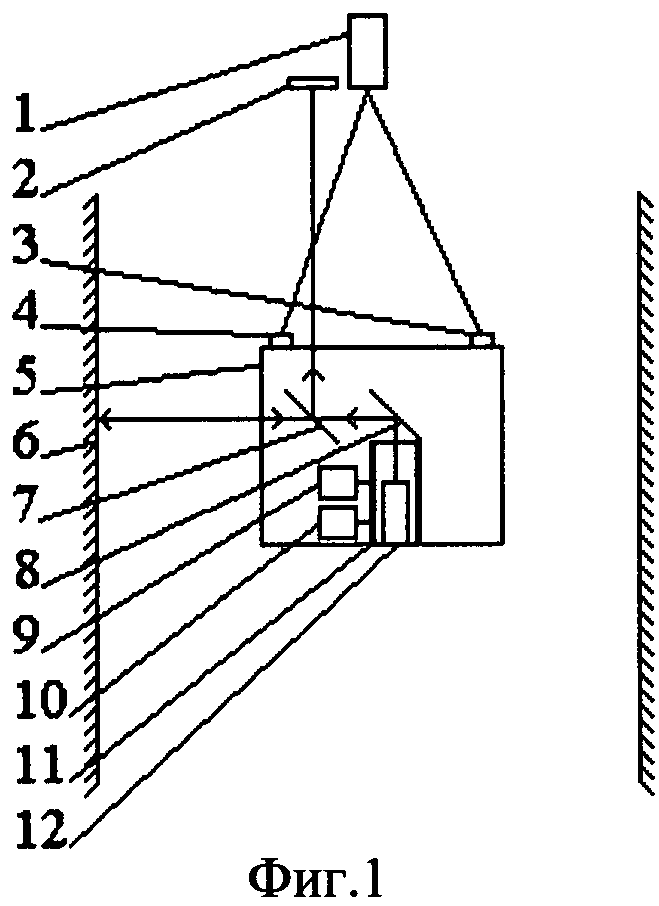
Видеоизмерительное устройство для контроля неровностей внутренней вертикальной цилиндрической поверхности, содержащее телекамеру и экран, неподвижно закрепляемые над контролируемой поверхностью, и перемещаемый внутри этой поверхности корпус с закрепленными на нем визирными марками, находящимися в поле зрения телекамеры, отличающееся тем, что в корпусе установлена вертикальная полая ось и связанные с ней шаговый двигатель и датчик угла, внутри полой оси установлен лазерный дальномер, на полой оси закреплено вращаемое зеркало и параллельно с ним, когда оно находится в исходном угловом положении, установлено неподвижное зеркало, при этом, когда вращаемое зеркало находится в исходном положении, луч лазерного дальномера отклоняется в горизонтальном направлении на неподвижное зеркало, отклоняющее его в вертикальном направлении на экран, а при других положениях вращаемого зеркала луч лазерного дальномера направляется в горизонтальной плоскости на контролируемую поверхность.
| ОПТИЧЕСКИЙ ДЕФЕКТОСКОП ДЛЯ КОНТРОЛЯ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ЖИДКОСТНЫХ ТРУБОПРОВОДОВ | 1998 |
|
RU2150690C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПРОФИЛЯ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ОБЪЕКТА | 2003 |
|
RU2270979C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ТОПОЛОГИИ ПОВЕРХНОСТИ МУАРОВЫМ МЕТОДОМ | 2004 |
|
RU2267087C1 |
| US 4300836 A, 17.11.1981. | |||

