Изобретение относится к области измерительной техники и может служить для бесконтактного автоматизированного контроля неровностей внутренней вертикальной цилиндрической поверхности, например, ракетной шахты.
Известно устройство для контроля внутренней поверхности труб (РВП-457), содержащее полый цилиндрический корпус, в котором соосно установлены кольцевой осветитель и система визуального наблюдения [1].
Известно устройство для контроля внутренней поверхности тел, содержащее полый цилиндрический корпус, в котором установлены кольцевой осветитель с фоконом и система визуального наблюдения с промышленной телевизионной установкой [2].
Известно устройство, содержащее установленные с двух сторон и внутри контролируемой поверхности оптически связанные между собой кольцевой источник света, отражатель и фотоприемник на основе многоэлементной двумерной матрицы, выходной сигнал которого обрабатывается в регистрирующем устройстве [3].
Недостатком первых двух устройств является визуальный съем информации, связанный с ошибками оператора. Недостатком третьего устройства является расположение узлов с двух торцов контролируемой поверхности и выполнение измерений путем перемещения контролируемой поверхности между этими узлами, что не всегда приемлемо (например, для измерений в ракетной шахте).
Наиболее близким к заявленному изобретению по совокупности признаков (прототипом) является устройство для контроля неровностей внутренней вертикальной цилиндрической поверхности, выполненное в виде цилиндрического корпуса с верхним и нижним кольцевыми окнами, за которыми установлены соответственно телекамера с ПЗС-матрицей и кольцевой источник света, снабженное устройством для перемещения внутри контролируемой поверхности, кроме того, содержащее ряд других узлов [4].
Основным недостатком прототипа является сложность конструкции, содержащей много различных узлов.
Целью настоящего изобретения является устранение указанного недостатка путем создания более простого устройства, содержащего небольшое число, по возможности, однотипных узлов.
Предлагаемое видеоустройство для контроля неровностей внутренней вертикальной цилиндрической поверхности, содержащее цилиндрический корпус с верхним и нижним кольцевыми окнами, телекамеру с ПЗС-матрицей, установленную за верхним кольцевым окном, кольцевой источник света, установленный за нижним кольцевым окном, и устройство перемещения корпуса внутри контролируемой поверхности, в отличие от прототипа и в соответствии с изобретением телекамера установлена с возможностью перемещения вдоль продольной оси корпуса и фиксации, в верхней части корпуса закреплены две визирные марки, а в нижней - балансир с возможностью перемещения перпендикулярно продольной оси корпуса и фиксации для приведения оптической оси объектива в вертикальное положение, кроме того, видеоустройство снабжено второй телекамерой с ПЗС-матрицей, закрепляемой на контролируемой поверхности так, чтобы визирные марки находились в ее поле зрения.
Заявленное видеоустройство, содержащее две однотипные телекамеры и две однотипные визирные марки, позволяет с высокой точностью контролировать неровности контролируемой поверхности на основе компьютерной обработки выходных видеосигналов этих телекамер.
На фиг.1 показана схема предлагаемого видеоустройства, выполненного в виде цилиндрического корпуса 1 с верхним и нижним кольцевыми окнами 2 и 3. Корпус снабжен устройством перемещения в виде троса 4 для перемещения внутри контролируемой поверхности 5. За верхним кольцевым окном 2 установлена телекамера 6 с ПЗС-матрицей с возможностью перемещения вдоль продольной оси корпуса 1 и фиксации. За нижним кольцевым окном 3 установлен кольцевой источник света 7. В верхней части корпуса 1 закреплены визирные марки 8 и 9, находящиеся в поле зрения второй телекамеры 10 с ПЗС-матрицей, закрепляемой на контролируемой поверхности 5. В нижней части корпуса 1 закреплен балансир 11 с возможностью перемещения перпендикулярно продольной оси корпуса 1 и фиксации для приведения оптической оси объектива телекамеры 6 в вертикальное положение.
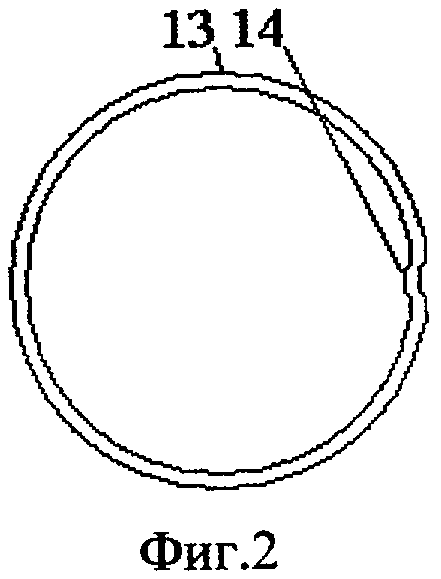
На фиг.2 показано кольцевое изображение 13 с изображением неровности 14 в выходном видеосигнале телекамеры 6.
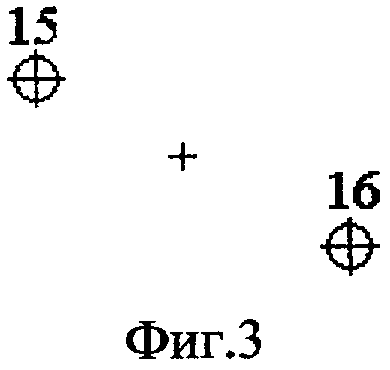
На фиг.3 показаны изображения 15 и 16 соответственно визирных марок 8 и 9 в выходном видеосигнале телекамеры 10.
Работа видеоустройства, основанная на компьютерной обработке выходных видеосигналов телекамер 6 и 10, состоит в следующем.
Телекамера 6 установлена над кольцевым источником света 7 так, что в ее выходном видеосигнале наблюдается часть контролируемой поверхности 5, освещенная узкой круговой полосой света. При этом в выходном видеосигнале телекамеры 6 наблюдается кольцевое изображение 13 с изображением неровности 14 (фиг.2).
Если контролируемая поверхность имеет цилиндрическую форму, то изображение 13 будет иметь круговую форму. Если контролируемая поверхность имеет, например, овальную форму, то и изображение 13 будет иметь овальную форму. Если контролируемая поверхность содержит неровность, то она проявится в виде изображения 14 (фиг.2), и при этом его геометрические характеристики (ширина, высота) будут пропорциональны геометрическим характеристикам исследуемой неровности, что и служит основанием для выполнения измерений.
Фокусное расстояние объектива и высота телекамеры 6 над кольцевым источником света 7 должны быть такими, чтобы обеспечить максимальный масштаб кольцевого изображения в видеосигнале. При этом точность измерений будет максимальной. Для этого телекамера 6 при фиксированном фокусном расстояния объектива установлена с возможностью перемещения вдоль продольной оси корпуса 1 и фиксации. Оптимальной является высота телекамеры 6 над кольцевым источником света 7, рассчитываемая по формуле:

где D - диаметр контролируемой поверхности.
При этом фокусное расстояние телекамеры 6 рассчитывается по формуле:

где М - эффективный размер ПЗС-матрицы телекамеры 6.
Угловое положение неровности 14 в кольцевом изображении 13, отсчитанное от некоторого наперед заданного направления, соответствует угловому положению неровности в сечении контролируемой поверхности 5.
При выполнении измерений необходимо, чтобы оптическая ось телекамеры 6, совмещенная с продольной осью корпуса 1, была вертикальной, что достигается перемещением балансира 11 перпендикулярно продольной оси корпуса 1.
Фокусное расстояние объектива второй телекамеры 10 устанавливается таким, чтобы в верхнем положении корпуса 1 масштаб изображений визирных целей 8 и 9 в видеосигнале также был максимальным, ввиду чего фокусное расстояние этой телекамеры рассчитывается по формуле:

где М - эффективный размер ПЗС-матрицы телекамеры 10, L - расстояние между визирными марками 8 и 9, Hmin - минимальная высота телекамеры 10 над визирными марками 8 и 9.
При перемещении корпуса 1 внутри контролируемой поверхности 5 оно может смещаться и поворачиваться, что должно учитываться в результатах измерений, что осуществляется следующим образом.
При смещении корпуса 1 изображения 15 и 16 (фиг.3) синхронно смещаются, а при поворотах - поворачиваются вокруг общего центра, что и служит основанием для выполнения измерений.
Источники информации
1. Прибор смотровой РВП-457, техническое описание и инструкция по эксплуатации.
2. Патент SU №1793210 от 03.06.1991. Устройство для контроля внутренней поверхности тел.
3. Патент RU №2245516 от 15.04.2003. Устройство для контроля отверстий деталей.
4. Патент US №4899277 А от 06.02.1996. Bore hole scanner with position detecting device and light polarizers.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИДЕОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ НЕРОВНОСТЕЙ ВНУТРЕННЕЙ ВЕРТИКАЛЬНОЙ ЦИЛИНДРИЧЕСКОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2584370C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРУБОПРОВОДОВ | 2023 |
|
RU2818406C1 |
| ЛАЗЕРНЫЙ ЦЕНТРАТОР ДЛЯ РЕНТГЕНОВСКОГО ИЗЛУЧАТЕЛЯ | 2003 |
|
RU2250576C2 |
| ВИДЕОАВТОКОЛЛИМАТОР | 2010 |
|
RU2455668C2 |
| СПОСОБ КОНТРОЛЯ И УСТАНОВКИ ОСИ ДЛИННОМЕРНОГО ИЗДЕЛИЯ ОТНОСИТЕЛЬНО БАЗОВОЙ ОСИ И ПРИБОР ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2143097C1 |
| ЛАЗЕРНЫЙ ЦЕНТРАТОР ДЛЯ РЕНТГЕНОВСКОГО ИЗЛУЧАТЕЛЯ | 2004 |
|
RU2261538C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ НАПРАВЛЕНИЯ С ОДНОГО ГОРИЗОНТА НА ДРУГОЙ | 2002 |
|
RU2219494C2 |
| КОМБИНИРОВАННЫЙ ПРИЦЕЛ С ЛАЗЕРНЫМ ДАЛЬНОМЕРОМ | 2006 |
|
RU2313116C1 |
| Цифровое устройство двухкамерной телевизионной системы с юстировкой направления визирной оси и с повышенной чувствительностью до одинакового уровня для каждого из каналов "свет-сигнал" | 2020 |
|
RU2733415C1 |
| ЛАЗЕРНЫЙ ПРОФИЛОМЕТР | 2006 |
|
RU2361175C2 |
Изобретение относится к области измерительной техники и может быть использовано для бесконтактного автоматизированного контроля внутренней вертикальной цилиндрической поверхности. Сущность: видеоустройство содержит цилиндрический корпус 1 с верхним и нижним кольцевыми окнами 2 и 3. За верхним кольцевым окном 2 установлена телекамера 6 с ПЗС-матрицей, которая имеет возможность для перемещения вдоль продольной оси корпуса 1 и фиксации в зависимости от диаметра контролируемой поверхности. За нижним кольцевым окном 3 установлен кольцевой источник света 7. Корпус снабжен устройством перемещения 4 внутри контролируемой поверхности 5. В верхней части корпуса 1 закреплены визирные марки 8 и 9, которые находятся в поле зрения второй телекамеры 10 с ПЗС-матрицей, закрепляемой на контролируемой поверхности 5. В нижней части корпуса 1 установлен балансир 11 с возможностью перемещения перпендикулярно продольной оси корпуса 1 и фиксации для приведения оптической оси телекамеры 6 в вертикальное положение. Технический результат: предлагаемое видеоустройство позволяет выполнять измерения неровностей внутренней вертикальной цилиндрической поверхности в автоматизированном режиме под управлением специальной прикладной компьютерной программы. 3 ил.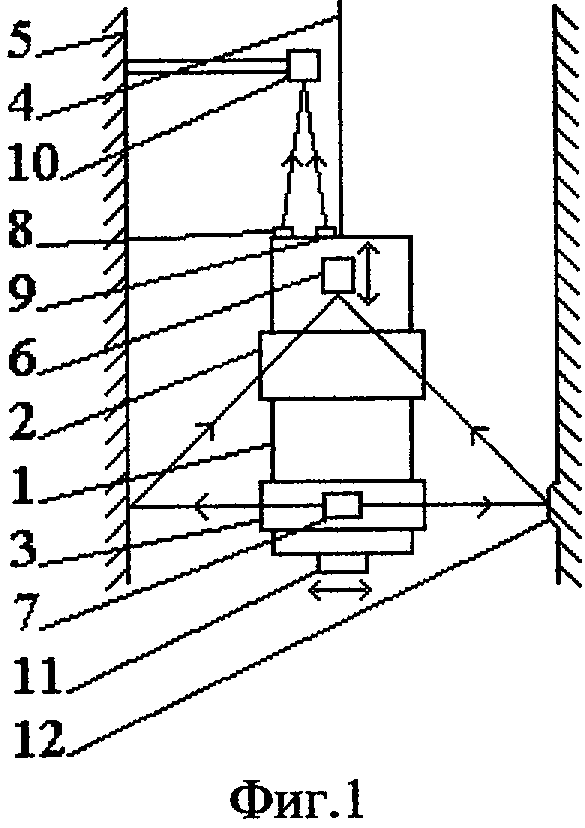
Видеоустройство для контроля неровностей внутренней вертикальной цилиндрической поверхности, содержащее цилиндрический корпус с верхним и нижним кольцевыми окнами, телекамеру с ПЗС-матрицей, установленную за верхним кольцевым окном, кольцевой источник света, установленный за нижним кольцевым окном, и устройство перемещения корпуса внутри контролируемой поверхности, отличающееся тем, что телекамера установлена с возможностью перемещения вдоль продольной оси корпуса и фиксации, в верхней части корпуса закреплены две визирные марки, а в нижней - балансир с возможностью перемещения перпендикулярно продольной оси корпуса и фиксации для приведения оптической оси объектива в вертикальное положение, кроме того, видеоустройство снабжено второй телекамерой с ПЗС-матрицей, закрепляемой на контролируемой поверхности так, чтобы визирные марки находились в ее поле зрения.
| US 4899277 А, 06.02.1990 | |||
| US 3637314 А, 25.01.1972 | |||
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ОТВЕРСТИЙ ДЕТАЛЕЙ | 2003 |
|
RU2245516C2 |
| US 4967092 A, 30.10.1990 | |||
| US 4317632 A, 02.03.1982 | |||
| Устройство для контроля внутренней поверхности тел | 1991 |
|
SU1793210A1 |

