Изобретение относится к космической технике и может быть использовано при наблюдении и съемках Земли и других планет экипажами пилотируемых космических аппаратов (КА) с помощью ручной перемещаемой относительно КА аппаратуры наблюдения.
Изображения поверхности планеты содержат полезную целевую информацию о наблюдаемой поверхности, при этом необходимым условием использования этой информации является определение географических координат полученных изображений области наблюдения.
Известен способ определения координат (Злобин В.К., Еремеев В.В. Обработка аэрокосмических изображений. Изд. ФИЗМАТ ЛИТ. 2006), согласно которому для определения координат получаемых изображений фиксируют время съемки, используя модель движения КА, рассчитывают положение центра масс и ориентацию КА в момент съемки в некоторой инерциальной системе координат, известное пространственное положение оптической оси объектива камеры в системе координат КА пересчитывают в эту систему координат, после чего при известной геометрии объектива определяют пространственное положение множества лучей, проходящих через выбранные точки изображения и точку фокуса объектива, и искомые координаты точек изображения рассчитывают как координаты точек пересечения этих лучей с поверхностью планеты.
Система, реализующая данный способ определения координат (Злобин В.К., Еремеев В.В. Обработка аэрокосмических изображений. Изд. ФИЗМАТ ЛИТ. 2006), включает блок фиксации времени съемки, блоки определения движения и ориентации КА, блоки определения пространственного положения оптической оси объектива камеры и расчета координат изображения на поверхности планеты. К недостаткам данных способа и системы относится необходимость внешнего задания информации о положении объектива камеры в системе координат КА в моменты съемки.
Известно устройство размещения излучателя на аппаратуре наблюдения, выполненное в виде встроенного посадочного места и средств жесткого крепления фотовспышки (излучателя света) на фотоаппаратуре (например, ф/а Canon А480). Недостатком устройства является отсутствие возможности оперативной смены излучателя (например, для его ремонта).
Известен способ определения географических координат изображений объектов на поверхности планеты при съемке с пилотируемого КА (патент РФ №2353902 от 11.05.2007, МПК G01C 11/00 - прототип способа), основанный на фиксации момента съемки и определении пространственного положения съемочной камеры с учетом известного положения центра масс КА, согласно которому определяют базовое пространственное положение свободно перемещаемой съемочной камеры по значениям положения центра масс КА, известной ориентации КА в фиксированный момент времени и известному пространственному положению съемочной камеры относительно конструкции КА в этот момент, одновременно в процессе съемки проводят измерения угловых скоростей поворотов съемочной камеры в инерциальной системе координат, по которым рассчитывают текущее пространственное положение съемочной камеры относительно базового положения, на основании которого рассчитывают географические координаты исследуемого объекта на поверхности планеты.
В качестве системы-прототипа выбрана система, реализующая способ-прототип (патент РФ №2353902 от 11.05.2007, МПК G01C 11/00), которая включает фото-видеокамеру, на которой жестко закреплены блок датчиков угловых скоростей и устройство обеспечения фиксации моментов съемки, выходы которых соединены со входами устройства приема, выходы которого соединены с устройством обработки, которое содержит блок определения положения центра масс КА, блок определения ориентации КА и соединенный с ними блок определения географических координат области наблюдения. Устройство обработки решает задачу определения географических координат области наблюдения на основе определения положения центра масс и ориентации КА. При этом все элементы данной системы - блок датчиков угловых скоростей, устройство обеспечения фиксации моментов съемки, устройство приема и устройство обработки - размещены на КА и/или имеют проводную связь с КА.
К недостаткам прототипов способа и системы относятся:
- наличие механической (проводной) связи блоков датчиков угловых скоростей, жестко закрепленных на фото-видеокамере, с КА ограничивает свободное перемещение аппаратуры наблюдения относительно КА в условиях невесомости, в частности ограничивает свободу перемещения и действий космонавта при нацеливании и сопровождении наблюдения, при выборе ракурса и условий наблюдения и съемки;
- накопление погрешности определения координат изображения при увеличении времени от момента фиксации базового пространственного положения съемочной камеры до момента, для которого рассчитываются географические координаты объекта наблюдения; данная погрешность обусловлена как накоплением ошибки самой вычислительной схемы использования измерений угловых скоростей, при которой на каждом шаге обработки измерений используется результат, полученный на предыдущем шаге, так и наличием погрешности непосредственного измерения угловых скоростей датчиками угловых скоростей;
- необходимость размещения на фото-видеокамере сложного и на настоящее время громоздкого прибора, которым является блок датчиков угловых скоростей.
В качестве прототипа устройства выбрано устройство размещения излучателя на аппаратуре наблюдения, выполненное в виде разъемного соединение для крепления съемной фотовспышки (излучателя света) на фотоаппаратуре (фотовспышка Canon Speedlite 430ЕХ II для ф/а Canon EOS -прототип устройства). К недостаткам устройства-прототипа относится то, что оно не предусматривает установку нескольких излучателей, в том числе не обеспечивает учет требований и ограничений, обусловленных целевой задачей, для решения которой используется излучение излучателей.
Задачей, на решение которой направлено настоящее изобретение, является высокоточное определение географических координат области, наблюдаемой через аппаратуру наблюдения, свободно перемещаемую в условиях невесомости относительно КА и не имеющую с ним механической связи.
Технический результат, достигаемый при осуществлении настоящего изобретения, заключается в обеспечении определения с высокой точностью географических координат области, наблюдаемой через аппаратуру наблюдения, свободно перемещаемую в условиях невесомости относительно КА и не имеющую с ним механической связи, при обеспечении возможности использования различной сменной аппаратуры наблюдения.
Технический результат достигается тем, что в способе определения географических координат области наблюдения перемещаемой относительно космического аппарата аппаратуры наблюдения, включающем определение положения центра масс и ориентации космического аппарата и определение пространственного положения аппаратуры наблюдения, дополнительно осуществляют формирование управляющих команд на излучение импульсных ультразвуковых сигналов не менее чем тремя ультразвуковыми излучателями, размещенными в разнесенных точках на свободно перемещаемой относительно космического аппарата аппаратуре наблюдения, осуществляют прием излученных импульсных ультразвуковых сигналов не менее чем тремя ультразвуковыми приемниками, размещенными в разнесенных точках на космическом аппарате, по излученным и принятым ультразвуковым сигналам измеряют время задержки ультразвуковых сигналов, при этом синхронизацию моментов излучения и приема импульсных ультразвуковых сигналов осуществляют по радиоканалу, осуществляют измерение температуры в местах размещения ультразвуковых излучателей и в местах размещения ультразвуковых приемников, по полученным временам задержки принятия ультразвуковых сигналов и измерениям температуры определяют расстояния от размещенных на аппаратуре наблюдения ультразвуковых излучателей до размещенных на космическом аппарате ультразвуковых приемников, и определяют географические координаты области наблюдения по положению центра масс космического аппарата относительно планеты, ориентации космического аппарата относительно планеты и пространственному положению аппаратуры наблюдения относительно космического аппарата, рассчитанному по упомянутым расстояниям от размещенных на аппаратуре наблюдения ультразвуковых излучателей до размещенных на космическом аппарате ультразвуковых приемников.
Технический результат достигается также тем, что система определения географических координат области наблюдения перемещаемой относительно космического аппарата аппаратуры наблюдения, включающая блок определения положения центра масс космического аппарата и блок определения ориентации космического аппарата, выходы которых соединены с, соответственно, первым и вторым входами блока определения географических координат области наблюдения, дополнительно содержит не менее чем три ультразвуковых излучателя и не менее чем один датчик температуры, установленные на аппаратуре наблюдения с помощью устройства размещения излучателей на аппаратуре наблюдения, не менее чем три ультразвуковых приемника и не менее чем один датчик температуры, установленные на космическом аппарате, блок формирования команд управления излучателями, контроллеры, радиотрансиверы, блок усиления сигналов, блок автоматической регулировки усиления, многоканальный аналого-цифровой преобразователь, блок измерения времени задержки сигналов, синхронизатор, блок определения пространственного положения аппаратуры наблюдения относительно космического аппарата, при этом входы ультразвуковых излучателей соединены с выходами блока формирования команд управления излучателями, вход которого соединен с первым выходом первого контроллера, второй выход и первый и второй входы которого соединены с, соответственно, входом и выходом первого радиотрансивера и выходом датчика температуры, установленного на аппаратуре наблюдения, причем выходы ультразвуковых приемников соединены с входами блока усиления сигналов, выходы которого соединены с входами блока автоматической регулировки усиления, выходы которого соединены с входами многоканального аналого-цифрового преобразователя, выход которого соединен с первым входом блока измерения времени задержки сигналов, второй вход которого соединен с выходом синхронизатора, который также соединен с первым входом второго контроллера, второй вход и первый и второй выходы которого соединены с, соответственно, выходом и входом второго радиотрансивера и первым входом блока определения пространственного положения аппаратуры наблюдения относительно космического аппарата, второй и третий входы и выход которого соединены с, соответственно, выходом блока измерения времени задержки сигналов, выходом датчика температуры, установленного на космическом аппарате, и третьим входом блока определения географических координат области наблюдения.
Технический результат достигается также тем, что устройство размещения излучателей на аппаратуре наблюдения, содержащее разъемное соединение, одна из разъемных частей которого жестко соединена с аппаратурой наблюдения, дополнительно содержит не менее чем три штанги, на каждой из которых размещены ультразвуковые излучатели, при этом штанги жестко соединены с другой из разъемных частей разъемного соединения, причем оси излучения ультразвуковых излучателей параллельны оси чувствительности аппаратуры наблюдения, а расстояния от каждого ультразвукового излучателя до оси чувствительности аппаратуры наблюдения выбираются не менее величины K, определяемой соотношением

где R - радиус объектива аппаратуры наблюдения;
L - длина объектива аппаратуры наблюдения, измеренная от проекции ультразвукового излучателя на ось чувствительности аппаратуры наблюдения;
P - максимальное из расстояний от центра иллюминатора космического аппарата, через который выполняется наблюдение, до расположенных на краю иллюминатора ультразвуковых приемников;
D - минимальное расстояние от объектива аппаратуры наблюдения до иллюминатора космического аппарата, через который выполняется наблюдение, в направлении оси чувствительности аппаратуры наблюдения.
Изобретение поясняется на фиг.1÷3, на которых представлены:
на фиг.1 - блок-схема предлагаемой системы, реализующей предлагаемый способ;
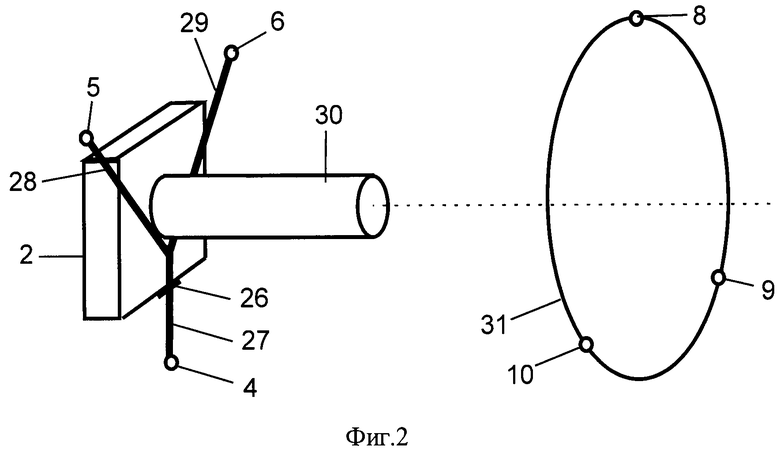
на фиг.2 - схема предлагаемого устройства размещения излучателей на аппаратуре наблюдения в его рабочем положении относительно ультразвуковых приемников, размещенных на иллюминаторе КА;
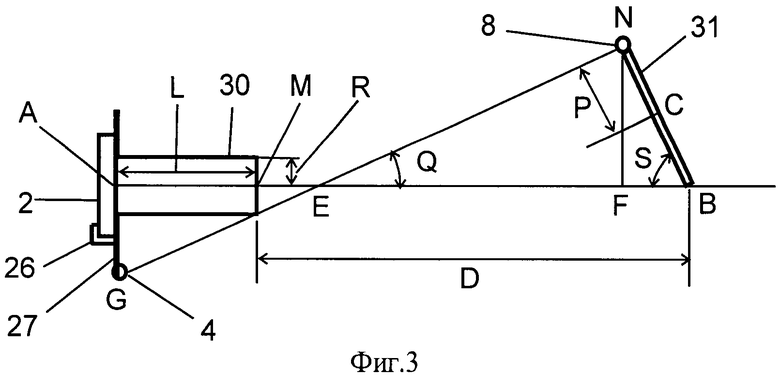
на фиг.3 - схема, поясняющая расчет расстояния от ультразвуковых излучателей до оси чувствительности аппаратуры наблюдения.
На фиг.1 введены следующие обозначения:
1 - КА;
2 - аппаратура наблюдения;
3 - устройство размещения излучателей на аппаратуре наблюдения;
4, 5, 6 - ультразвуковые излучатели;
7 - датчик температуры, установленный на аппаратуре наблюдения;
8, 9, 10 - ультразвуковые приемники;
11 - датчик температуры, установленный на КА;
12 - блок формирования команд управления излучателями;
13, 14 - первый и второй контроллеры;
15, 16 - первый и второй радиотрансиверы;
17 - блок усиления сигналов;
18 - блок автоматической регулировки усиления;
19 - многоканальный аналого-цифровой преобразователь;
20 - блок измерения времени задержки сигналов;
21 - синхронизатор;
22 - блок определения пространственного положения аппаратуры наблюдения относительно КА;
23 - блок определения географических координат области наблюдения;
24 - блок определения положения центра масс КА;
25 - блок определения ориентации КА.
На фиг.2 дополнительно введены обозначения:
26 - разъемное соединение;
27, 28, 29 - штанги;
30 - объектив аппаратуры наблюдения;
31 - иллюминатор КА.
На фиг.3 дополнительно введены обозначения:
А - проекция ультразвукового излучателя на ось чувствительности аппаратуры наблюдения;
АВ - ось чувствительности аппаратуры наблюдения;
C - центр иллюминатора;
S - угол между осью чувствительности аппаратуры наблюдения и плоскостью иллюминатора;
Q - угол между осью чувствительности аппаратуры наблюдения и направлением от ультразвукового излучателя на ультразвуковой приемник.
Для измерения шести координат пространственного положения аппаратуры наблюдения - трех линейных и трех угловых параметров - необходимо использовать не менее трех ультразвуковых излучателей, размещенных на аппаратуре наблюдения, и не менее трех ультразвуковых приемников, размещенных на КА. Датчики температуры, измерения которых используются для определения текущей скорости распространения ультразвуковых сигналов между излучателями и приемниками, могут быть размещены как непосредственно рядом с каждым излучателем и каждым приемником, так и по одному на аппаратуре наблюдения и на КА.
Описание способа совместим с описанием системы для его осуществления при использовании трех ультразвуковых излучателей и одного датчика температуры, установленных на аппаратуре наблюдения, и трех ультразвуковых приемников и одного датчика температуры, установленных на КА.
В таком исполнении система определения географических координат области наблюдения перемещаемой относительно КА аппаратуры наблюдения содержит: КА 1, аппаратуру наблюдения 2, устройство размещения излучателей на аппаратуре наблюдения 3, три ультразвуковых излучателя 4, 5, 6 и датчик температуры 7, установленные на аппаратуре наблюдения 2 с помощью устройства размещения излучателей на аппаратуре наблюдения 3, три ультразвуковых приемника 8, 9, 10 и датчик температуры 11, установленные на КА 1, блок формирования команд управления излучателями 12, два контроллера 13, 14, два радиотрансивера 15, 16, блок усиления сигналов 17, блок автоматической регулировки усиления 18, многоканальный аналого-цифровой преобразователь 19, блок измерения времени задержки сигналов 20, синхронизатор 21, блок определения пространственного положения аппаратуры наблюдения относительно КА 22, блок определения географических координат области наблюдения 23, блок определения положения центра масс КА 24, блок определения ориентации КА 25.
Первый радиотрансивер 15 установлен на аппаратуре наблюдения 2.
Второй радиотрансивер 16 установлен на КА 1.
Ультразвуковые излучатели 4, 5, 6 размещены на устройстве размещения излучателей на аппаратуре наблюдения 3, которое закреплено на аппаратуре наблюдения 2. Такая установка ультразвуковых излучателей соответствует тому, что ультразвуковые излучатели 4, 5, 6 размещены в точках с известными координатами в связанной с аппаратурой наблюдения 2 системе координат. Входы ультразвуковых излучателей 4, 5, 6 соединены с выходами блока формирования команд управления излучателями 12, вход которого соединен с первым выходом первого контроллера 13, второй выход и первый и второй входы которого соединены с, соответственно, входом и выходом первого радиотрансивера 15 и выходом датчика температуры 7, установленного на аппаратуре наблюдения 2.
Ультразвуковые приемники 8, 9, 10 размещены в разнесенных точках с известными координатами в связанной с КА 1 системе координат. Выходы ультразвуковых приемников 8, 9, 10 соединены с входами блока усиления сигналов 17, выходы которого соединены с входами блока автоматической регулировки усиления 18, выходы которого соединены с входами многоканального аналого-цифрового преобразователя 19, выход которого соединен с первым входом блока измерения времени задержки сигналов 20, второй вход которого соединен с выходом синхронизатора 21, который также соединен с первым входом второго контроллера 14, второй вход и первый и второй выходы которого соединены с, соответственно, выходом и входом второго радиотрансивера 16 и первым входом блока определения пространственного положения аппаратуры наблюдения относительно КА 22, второй и третий входы и выход которого соединены с, соответственно, выходом блока измерения времени задержки сигналов 20, выходом датчика температуры 11, установленного на КА 1, и входом блока определения географических координат области наблюдения 23, другие входы которого соединены с выходами блока определения положения центра масс КА 24 и блока определения ориентации КА 25.
В начале каждого кадра измерения синхронизатор 21 вырабатывает синхронизирующий импульс запуска, поступающий на блок измерения времени задержки сигналов 20 и одновременно через второй контроллер 14, второй и первый радиотрансиверы 16, 15 и первый контроллер 13 на блок формирования команд управления излучателями 12.
При получении вышеупомянутого сигнала блок формирования команд управления излучателями 12 последовательно формирует на своих выходах импульсы с фиксированной временной задержкой τ между ними. Данные импульсы поступают на ультразвуковые излучатели 4, 5, 6, которые поочередно вырабатывают импульсные ультразвуковые сигналы.
Излученные ультразвуковые сигналы принимают с помощью размещенных на КА ультразвуковых приемников 8, 9, 10. Упомянутая временная задержка между импульсными ультразвуковыми сигналами τ определяется рабочей зоной расположения аппаратуры наблюдения относительно КА, которая определяется максимально возможным расстоянием от аппаратуры наблюдения до каждого из размещенных на КА ультразвуковых приемников. При этом периодичность выработки синхронизатором 21 синхронизирующих импульсов запуска определяется данной временной задержкой τ и общим количеством ультразвуковых излучателей.
Принятые ультразвуковые сигналы через блок усиления сигналов 17 и блок автоматической регулировки усиления 18 поступают на многоканальный аналого-цифровой преобразователь 19, с выхода которого оцифрованные значения поступают на вход блока измерения времени задержки сигналов 20.
Блок измерения времени задержки сигналов 20 проводит анализ оцифрованных значений сигналов приемников 8, 9, 10, отделяет рабочие сигналы, полученные от излучателей 4, 5, 6, от помех и вычисляет временные задержки между импульсом запуска и принятыми рабочими сигналами. При этом, поскольку излученные импульсные ультразвуковые сигналы разнесены по времени, то в каждом из приемников принятые рабочие сигналы также разнесены по времени.
С выхода блока измерения времени задержки сигналов 20 измеренные времена задержки сигналов поступают на блок определения пространственного положения аппаратуры наблюдения относительно КА 22.
Сигнал от датчика температуры 7, установленного на аппаратуре наблюдения 2, через первый контроллер 13, первый и второй радиотрансиверы 15, 16 и второй контроллер 14 поступает на блок определения пространственного положения аппаратуры наблюдения относительно КА 22.
Сигнал от датчика температуры 11, установленного на КА 1, также поступает на блок определения пространственного положения аппаратуры наблюдения относительно КА 22.
В блоке определения пространственного положения аппаратуры наблюдения относительно КА 22 по полученным временам задержки рассчитываются расстояния между ультразвуковыми излучателями 4, 5, 6 и ультразвуковыми приемниками 8, 9, 10, причем скорость звука вычисляется с учетом средней температуры, полученной с датчиков температуры 7, 11. По полученным расстояниям рассчитывается пространственное положение аппаратуры наблюдения относительно КА, а именно линейные и угловые координаты аппаратуры наблюдения в связанной с КА системе координат, которые передаются в блок определения географических координат области наблюдения 23.
В блоке определения положения центра масс КА 24 и блоке определения ориентации КА 25, которые могут быть выполнены на основе средств навигационных измерений движения КА, определяются положение центра масс и ориентация КА относительно планеты, которые также передаются в блок определения географических координат области наблюдения 23.
В блоке определения географических координат области наблюдения 23 по положению центра масс и ориентации КА относительно планеты и пространственному положению аппаратуры наблюдения относительно КА определяются географические координаты области наблюдения.
Устройство размещения излучателей на аппаратуре наблюдения 3, используемое в описанной системе определения географических координат области наблюдения перемещаемой относительно КА аппаратуры наблюдения, содержит разъемное соединение 26, одна из разъемных частей которого жестко соединена с аппаратурой наблюдения 2, и три штанги 27, 28, 29 с размещенными на них ультразвуковыми излучателями 4, 5, 6. Штанги 27, 28, 29 жестко соединены с другой из разъемных частей разъемного соединения 26. Оси излучения ультразвуковых излучателей 4, 5, 6 параллельны оси чувствительности аппаратуры наблюдения. Расстояния от каждого ультразвукового излучателя до оси чувствительности аппаратуры наблюдения выбираются не менее величины К, определяемой соотношением

где R - радиус объектива аппаратуры наблюдения;
L - длина объектива аппаратуры наблюдения, измеренная от проекции ультразвукового излучателя на ось чувствительности аппаратуры наблюдения;
P - максимальное из расстояний от центра иллюминатора космического аппарата, через который выполняется наблюдение, до расположенных на краю иллюминатора ультразвуковых приемников;
D - минимальное расстояние от объектива аппаратуры наблюдения до иллюминатора космического аппарата, через который выполняется наблюдение, в направлении оси чувствительности аппаратуры наблюдения.
Выполнение соотношения (1) обеспечивает наличие прямой видимости между ультразвуковыми излучателями, установленными на аппаратуре наблюдения, и приемниками излучения, установленными по периметру используемого для наблюдения иллюминатора КА, при любом расположении аппаратуры наблюдения относительно иллюминатора КА в моменты выполнения наблюдений, а именно при любых возможных значениях углов между осью чувствительности аппаратуры наблюдения и направлениями от ультразвуковых излучателей на ультразвуковые приемники и между осью чувствительности аппаратуры наблюдения и плоскостью иллюминатора, принимаемых ими в моменты наблюдения (в данные моменты ось чувствительности аппаратуры наблюдения проходит через иллюминатор, через который выполняется наблюдение).
Соотношение (1) может быть получено из следующих формул, графически проиллюстрированных на фиг.3. Из прямоугольного треугольника AEG имеем:



Из прямоугольного треугольника NEB имеем:


Приравнивая правые части (3) и (6) получаем:

откуда с учетом (2) следует (1). Вычисление значения К по соотношению (1) может быть осуществлено, например, итерационным методом последовательных приближений, согласно которому вычисления начинаются с некоторого начального приближения K0 и каждое следующее приближение Ki рассчитывается по формуле:

где Fun(K) - правая часть соотношения (1). Вычисления заканчиваются, когда отличие между Ki и Ki-1 становится меньше требуемой точности вычисления значения K.
Ультразвуковые излучатели могут быть размещены в одной плоскости, перпендикулярной оси чувствительности аппаратуры наблюдения. Также каждый ультразвуковой излучатель может быть размещен на одинаковых расстояниях от двух ближайших к нему ультразвуковых излучателей и на одинаковых расстояниях от оси чувствительности аппаратуры наблюдения. При этом ультразвуковые приемники также могут быть размещены в одной плоскости, которая параллельна плоскости иллюминатора КА, через который выполняется наблюдение, на одинаковых расстояниях от двух ближайших к каждому приемнику ультразвуковых приемников и на одинаковых расстояниях от центра упомянутого иллюминатора.
Такое расположение излучателей, с одной стороны, позволит уменьшить внешние габариты устройства размещения излучателей на аппаратуре наблюдения, а с другой стороны, позволит максимально разнести в пространстве точки размещения излучателей, обеспечив этим максимизацию точности определения пространственного положения аппаратуры наблюдения относительно КА.
В предлагаемом изобретении частотный диапазон работы радиотрансиверов выбирается исходя из требований безопасности, отсутствия помех и взаимовлияний на работу другого штатного радиооборудования внутри пилотируемого КА. Номинально данные радиотрансиверы могут работать, например, в диапазоне Wi-Fi (частота 2,4 гГц) по протоколу SimpliciTI.
В качестве ультразвуковых излучателей и приемников могут быть использованы, например, ультразвуковые датчики фирмы Murata Manufacturing Co., Ltd. (www.murata.com): MA40E8-2 - ультразвуковой приемопередатчик, MA40E7R - ультразвуковой приемник, MA40E7S - ультразвуковой излучатель, при этом вес датчика не превышает 5 грамм при габаритах, составляющих несколько миллиметров. Частотный диапазон работы ультразвуковых излучателей также выбирается исходя из требований безопасности, отсутствия помех и взаимовлияний на работу другого штатного радиооборудования внутри пилотируемого КА. Номинальная рабочая частота ультразвуковых излучателей может составлять, например, 40 кГц.
В качестве датчиков температуры могут быть использованы, например, прецизионные температурные сенсоры ТМР35, ТМР36, ТМР37 фирмы Analog Devices или температурные сенсоры, встроенные в современные микроконтроллеры.
В предлагаемом изобретении на приборе наведения требуется разместить ограниченное число элементов, главными из которых являются ультразвуковые излучатели, датчик температуры и радиотрансивер. Малый вес и габариты современных ультразвуковых излучателей, датчика температуры, радиотрансивера обеспечивают минимизацию массы и габаритов элементов, которые необходимо разместить на приборе наведения.
Опишем технический эффект предлагаемого изобретения.
Предложные способ и система определения географических координат области наблюдения перемещаемой относительно КА аппаратуры наблюдения обеспечивают высокоточное определение географических координат области, наблюдаемой через аппаратуру наблюдения, свободно перемещаемую в условиях невесомости относительно КА и не имеющую с ним механической связи, при обеспечении возможности использования различной сменной аппаратуры наблюдения, в том числе обеспечивают возможность любого перемещения оператора КА, требуемого в процессе выполнения наблюдений с помощью ручной аппаратуры наблюдения.
Достижение технического результата в предложенных способе и системе обеспечивается:
- в части обеспечения возможности свободного перемещения аппаратуры наблюдения в условиях невесомости относительно КА и исключения механической (в том числе проводной) связи аппаратуры наблюдения с КА - использованием импульсных ультразвуковых сигналов, излучаемых не менее чем тремя ультразвуковыми излучателями, размещенными на аппаратуре наблюдения, принимаемых не менее чем тремя ультразвуковыми приемниками, размещенными на КА, а также выполнением синхронизации моментов излучения и приема импульсных ультразвуковых сигналов по радиоканалу между радиотрансивером, размещенным на КА, и радиотрансивером, размещенным на аппаратуре наблюдения;
- в части исключения зависимости точности определения географических координат области наблюдения от изменения скорости распространения ультразвуковых сигналов - измерением температуры в местах размещения ультразвуковых излучателей и в местах размещения ультразвуковых приемников и учетом данных измерений температуры при определении текущей скорости распространения ультразвуковых сигналов между излучателями и приемниками;
- в части обеспечения идентификации сигналов, излучаемого разными излучателями - использованием временного метода разделения, при котором ультразвуковые излучатели посылают импульсные сигналы поочередно с задержкой по времени;
- в части исключения накопления погрешности определения координат области наблюдения - определением координат области наблюдения по измерениям времени задержки ультразвуковых сигналов и пространственному положению КА, взятым непосредственно на текущий момент времени;
- в части уменьшения габаритов элементов, размещаемых на аппаратуре наблюдения - использованием в качестве элементов, которые необходимо разместить на аппаратуре наблюдения, ультразвуковых излучателей и датчиков температуры, которые имеют ничтожную, по отношению к аппаратуре наблюдения, массу и габариты.
В том числе достижение технического результата в предложенной системе обеспечивается введением предложенных датчиков температуры, радиотрансиверов, блока определения пространственного положения аппаратуры наблюдения относительно КА и функциональных блоков, реализующих излучение, прием и описанную обработку ультразвуковых сигналов, а также введением предложенных функциональных связей между блоками и предложенным исполнением уже известных блоков.
Предложенное устройство размещения излучателей на аппаратуре наблюдения обеспечивает синхронизацию перемещения аппаратуры наблюдения и ультразвуковых излучателей при обеспечении требуемых для высокоточного определения географических координат области наблюдения геометрических параметров расположения ультразвуковых излучателей относительно аппаратуры наблюдения и обеспечении возможности использования различной сменной аппаратуры наблюдения.
Достижение технического результата в предложенном устройстве размещения излучателей на аппаратуре наблюдения обеспечивается предложенным размещением излучателей на данном устройстве посредством предложенных штанг, которые предложенным образом соединены с аппаратурой наблюдения, а также предложенным размещением излучателей относительно аппаратуры наблюдения, в том числе размещением их на предложенном расстоянии до оси чувствительности аппаратуры наблюдения при обеспечении возможности использования различной сменной аппаратуры наблюдения.
Выполненная оценка эффективности применения предлагаемого изобретения на международной космической станции (МКС) показала, что его использование качественно повысит эффективность выполнения картографической «привязки» результатов геофизических наблюдений, выполняемых через иллюминаторы МКС, обеспечивая при этом уникальную оперативность выполнения целевой интерпретации любого количества изображений, получаемых с помощью находящейся на МКС разнообразной аппаратуры наблюдения.
Промышленное исполнение существенных признаков, характеризующих изобретение, не является сложным и может быть выполнено по известным технологиям.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОРИЕНТИРОВАНИЯ ПЕРЕМЕЩАЕМОГО В ПИЛОТИРУЕМОМ АППАРАТЕ ПРИБОРА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2531781C2 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ ПЕРЕМЕЩАЕМОЙ НА БОРТУ ПИЛОТИРУЕМОГО КОРАБЛЯ АППАРАТУРЫ НАБЛЮДЕНИЯ | 2018 |
|
RU2692205C1 |
| СИСТЕМА ОРИЕНТИРОВАНИЯ ПЕРЕМЕЩАЕМОЙ НА БОРТУ ПИЛОТИРУЕМОГО КОРАБЛЯ АППАРАТУРЫ | 2018 |
|
RU2692284C1 |
| СИСТЕМА УПРАВЛЕНИЯ РАЗМЕЩЕННОЙ НА КОСМИЧЕСКОМ КОРАБЛЕ ПЕРЕНОСНОЙ АППАРАТУРОЙ НАБЛЮДЕНИЯ | 2019 |
|
RU2725009C1 |
| СПОСОБ ОРИЕНТИРОВАНИЯ ПЕРЕМЕЩАЕМОЙ НА БОРТУ ПИЛОТИРУЕМОГО КОРАБЛЯ АППАРАТУРЫ | 2018 |
|
RU2693634C1 |
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕМЕЩАЕМОЙ НА БОРТУ ПИЛОТИРУЕМОГО КОРАБЛЯ АППАРАТУРОЙ НАБЛЮДЕНИЯ | 2021 |
|
RU2780900C1 |
| СИСТЕМА УПРАВЛЕНИЯ РАЗМЕЩЕННОЙ НА КОСМИЧЕСКОМ КОРАБЛЕ ПЕРЕНОСНОЙ АППАРАТУРОЙ НАБЛЮДЕНИЯ | 2019 |
|
RU2725012C1 |
| СПОСОБ ОРИЕНТИРОВАНИЯ ПЕРЕМЕЩАЕМОЙ НА БОРТУ ПИЛОТИРУЕМОГО КОРАБЛЯ АППАРАТУРЫ | 2018 |
|
RU2695739C1 |
| СПОСОБ УПРАВЛЕНИЯ РАЗМЕЩЕННОЙ НА КОСМИЧЕСКОМ КОРАБЛЕ ПЕРЕНОСНОЙ АППАРАТУРОЙ НАБЛЮДЕНИЯ | 2019 |
|
RU2717614C1 |
| СПОСОБ ОРИЕНТИРОВАНИЯ ПЕРЕМЕЩАЕМОЙ НА БОРТУ ПИЛОТИРУЕМОГО КОРАБЛЯ АППАРАТУРЫ | 2018 |
|
RU2695041C1 |
Изобретение относится к космической технике. Способ определения географических координат области наблюдения перемещаемой относительно КА аппаратуры наблюдения включает навигационные измерения движения КА, определение положения центра масс и ориентации КА, определение пространственного положения аппаратуры наблюдения. Дополнительно осуществляют формирование управляющих команд на излучение импульсных ультразвуковых сигналов не менее чем тремя ультразвуковыми излучателями, размещенными в разнесенных точках на свободно перемещаемой относительно КА аппаратуре наблюдения, осуществляют прием излученных импульсных ультразвуковых сигналов не менее чем тремя ультразвуковыми приемниками, размещенными в разнесенных точках на КА. По излученным и принятым ультразвуковым сигналам измеряют время задержки ультразвуковых сигналов. Синхронизацию моментов излучения и приема импульсных ультразвуковых сигналов осуществляют по радиоканалу. Осуществляют измерение температуры в местах размещения ультразвуковых излучателей и в местах размещения ультразвуковых приемников. По полученным временам задержки принятия ультразвуковых сигналов и измерениям температуры определяют расстояния от ультразвуковых излучателей до ультразвуковых приемников. Определяют географические координаты области наблюдения по положению центра масс КА относительно планеты, ориентации КА относительно планеты и пространственному положению аппаратуры наблюдения относительно КА, рассчитанному по расстояниям от ультразвуковых излучателей до ультразвуковых приемников. Система определения географических координат области наблюдения перемещаемой относительно КА аппаратуры наблюдения включает блок определения положения центра масс КА, блок определения ориентации КА, блок определения географических координат области наблюдения. Дополнительно введены не менее чем три ультразвуковых излучателя и не менее чем один датчик температуры, установленные на аппаратуре наблюдения, не менее чем три ультразвуковых приемника и не менее чем один датчик температуры, установленные на КА, блок формирования команд управления излучателями, контроллеры, радио-трансиверы, блок усиления сигналов, блок автоматической регулировки усиления, многоканальный аналого-цифровой преобразователь, блок измерения времени задержки сигналов, синхронизатор, блок определения пространственного положения аппаратуры наблюдения относительно КА. Устройство размещения излучателей на аппаратуре наблюдения содержит разъемное соединение, одна из разъемных частей которого жестко соединена с аппаратурой наблюдения. Дополнительно введены не менее чем три штанги, на каждой из которых размещены ультразвуковые излучатели. Штанги жестко соединены с другой из разъемных частей разъемного соединения. Оси излучения ультразвуковых излучателей параллельны оси чувствительности аппаратуры наблюдения. Расстояния от ультразвуковых излучателей до оси чувствительности аппаратуры наблюдения выбираются по предложенной формуле в зависимости от размеров объектива аппаратуры наблюдения и иллюминатора КА, через который выполняется наблюдение, и минимального расстояния от аппаратуры наблюдения до иллюминатора. Технический результат - в обеспечении определения с высокой точностью географических координат области, наблюдаемой через аппаратуру наблюдения, свободно перемещаемую в условиях невесомости относительно КА и не имеющую с ним механической связи, при обеспечении возможности использования различной сменной аппаратуры наблюдения. 3 н.п. ф-лы, 3 ил.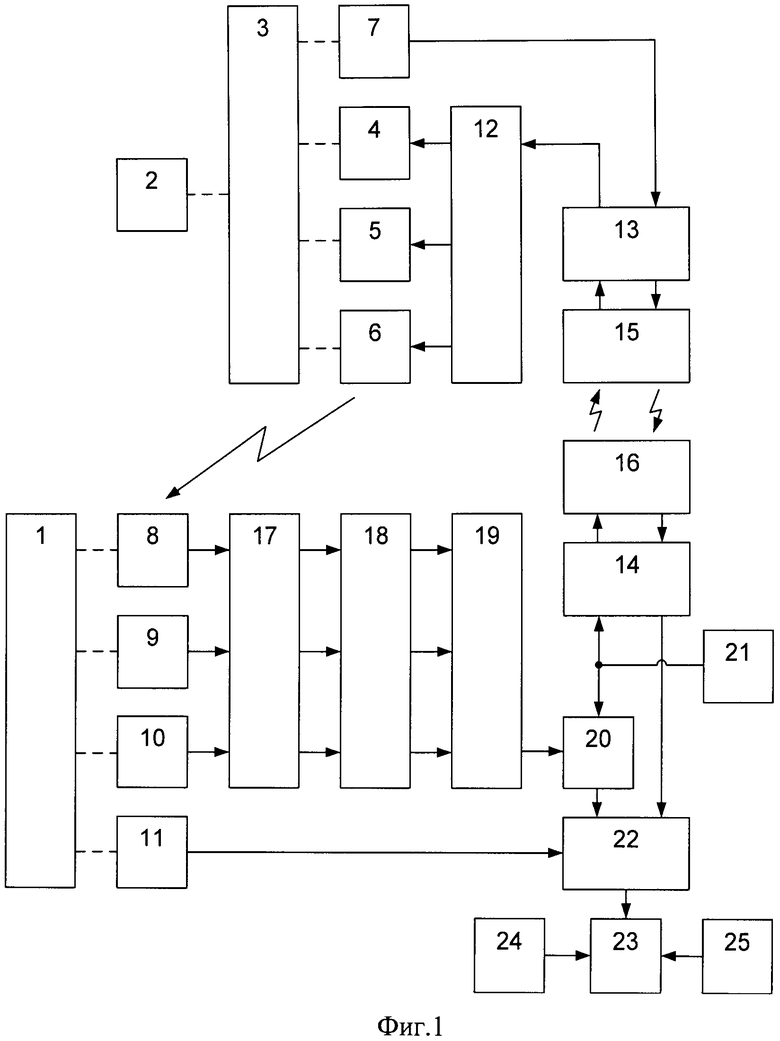
1. Способ определения географических координат области наблюдения перемещаемой относительно космического аппарата аппаратуры наблюдения, включающий определение положения центра масс и ориентации космического аппарата и определение пространственного положения аппаратуры наблюдения, отличающийся тем, что осуществляют формирование управляющих команд на излучение импульсных ультразвуковых сигналов не менее чем тремя ультразвуковыми излучателями, размещенными в разнесенных точках на свободно перемещаемой относительно космического аппарата аппаратуре наблюдения, осуществляют прием излученных импульсных ультразвуковых сигналов не менее чем тремя ультразвуковыми приемниками, размещенными в разнесенных точках на космическом аппарате, по излученным и принятым ультразвуковым сигналам измеряют время задержки ультразвуковых сигналов, при этом синхронизацию моментов излучения и приема импульсных ультразвуковых сигналов осуществляют по радиоканалу, осуществляют измерение температуры в местах размещения ультразвуковых излучателей и в местах размещения ультразвуковых приемников, по полученным временам задержки принятия ультразвуковых сигналов и измерениям температуры определяют расстояния от размещенных на аппаратуре наблюдения ультразвуковых излучателей до размещенных на космическом аппарате ультразвуковых приемников и определяют географические координаты области наблюдения по положению центра масс космического аппарата относительно планеты, ориентации космического аппарата относительно планеты и пространственному положению аппаратуры наблюдения относительно космического аппарата, рассчитанному по упомянутым расстояниям от размещенных на аппаратуре наблюдения ультразвуковых излучателей до размещенных на космическом аппарате ультразвуковых приемников.
2. Система определения географических координат области наблюдения перемещаемой относительно космического аппарата аппаратуры наблюдения, включающая блок определения положения центра масс космического аппарата и блок определения ориентации космического аппарата, выходы которых соединены с, соответственно, первым и вторым входами блока определения географических координат области наблюдения, отличающаяся тем, что дополнительно введены не менее чем три ультразвуковых излучателя и не менее чем один датчик температуры, установленные на аппаратуре наблюдения с помощью устройства размещения излучателей на аппаратуре наблюдения, не менее чем три ультразвуковых приемника и не менее чем один датчик температуры, установленные на космическом аппарате, блок формирования команд управления излучателями, контроллеры, радиотрансиверы, блок усиления сигналов, блок автоматической регулировки усиления, многоканальный аналого-цифровой преобразователь, блок измерения времени задержки сигналов, синхронизатор, блок определения пространственного положения аппаратуры наблюдения относительно космического аппарата, при этом входы ультразвуковых излучателей соединены с выходами блока формирования команд управления излучателями, вход которого соединен с первым выходом первого контроллера, второй выход и первый и второй входы которого соединены с, соответственно, входом и выходом первого радиотрансивера и выходом датчика температуры, установленного на аппаратуре наблюдения, причем выходы ультразвуковых приемников соединены с входами блока усиления сигналов, выходы которого соединены с входами блока автоматической регулировки усиления, выходы которого соединены с входами многоканального аналого-цифрового преобразователя, выход которого соединен с первым входом блока измерения времени задержки сигналов, второй вход которого соединен с выходом синхронизатора, который также соединен с первым входом второго контроллера, второй вход и первый и второй выходы которого соединены с, соответственно, выходом и входом второго радиотрансивера и первым входом блока определения пространственного положения аппаратуры наблюдения относительно космического аппарата, второй и третий входы и выход которого соединены с, соответственно, выходом блока измерения времени задержки сигналов, выходом датчика температуры, установленного на космическом аппарате, и третьим входом блока определения географических координат области наблюдения.
3. Устройство размещения излучателей на аппаратуре наблюдения, содержащее разъемное соединение, одна из разъемных частей которого жестко соединена с аппаратурой наблюдения, отличающееся тем, что дополнительно введены не менее чем три штанги, на каждой из которых размещены ультразвуковые излучатели, при этом штанги жестко соединены с другой из разъемных частей разъемного соединения, причем оси излучения ультразвуковых излучателей параллельны оси чувствительности аппаратуры наблюдения, а расстояния от каждого ультразвукового излучателя до оси чувствительности аппаратуры наблюдения выбираются не менее величины K, определяемой соотношением
 ,
,
где R - радиус объектива аппаратуры наблюдения;
L - длина объектива аппаратуры наблюдения, измеренная от проекции ультразвукового излучателя на ось чувствительности аппаратуры наблюдения;
P - максимальное из расстояний от центра иллюминатора космического аппарата, через который выполняется наблюдение, до расположенных на краю иллюминатора ультразвуковых приемников;
D - минимальное расстояние от объектива аппаратуры наблюдения до иллюминатора космического аппарата, через который выполняется наблюдение, в направлении оси чувствительности аппаратуры наблюдения.
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОГРАФИЧЕСКИХ КООРДИНАТ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ НА ПОВЕРХНОСТИ ПЛАНЕТЫ ПРИ СЪЕМКЕ С ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО АППАРАТА | 2007 |
|
RU2353902C2 |
| ЗЛОБИН В.К | |||
| ЕРЕМЕЕВ В.В | |||
| Обработка аэрокосмических изображений | |||
| Изд | |||
| ФИЗМАТ ЛИТ | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Устройство для счета груженых вагонеток | 1933 |
|
SU35448A1 |
| СПОСОБ ОПЕРАТИВНОГО ИССЛЕДОВАНИЯ АТМОСФЕРЫ, ЗЕМНОЙ ПОВЕРХНОСТИ И ОКЕАНА | 2010 |
|
RU2436134C1 |
| НАВИГАЦИОННО-ТОПОГРАФИЧЕСКИЙ ВНУТРИТРУБНЫЙ ИНСПЕКТИРУЮЩИЙ СНАРЯД | 2007 |
|
RU2321828C1 |

