Изобретение относится к космической технике и может найти применение при съемках Земли и других планет с помощью фото- и видеокамер экипажами пилотируемых космических аппаратов (КА).
Изображения земной поверхности (в будущем и других планет), полученные экипажами пилотируемых КА с помощью ручных съемочных камер, содержат полезную информацию о состоянии природных ресурсов, сооружений, последствиях стихийных бедствий и т.п. Необходимым условием использования этой информации является определение географических координат зафиксированных на изображении объектов, позволяющее рассчитать их местоположение, протяженность, площадь и т.п.
В литературе описан способ определения координат (см. например, Злобин В.К., Еремеев В.В. Обработка аэрокосмических изображений. Изд. ФИЗМАТ ЛИТ. 2006), при котором съемочная камера жестко закреплена и ее пространственное положение относительно конструкции КА известно.
Для определения координат получаемых изображений фиксируется время съемки. С помощью модели движения КА рассчитывают положение центра масс КА и ориентацию КА (т.е. пространственное положение конструкции КА) в момент съемки в некоторой инерциальной системе координат. Известное пространственное положение оптической оси объектива (ООО) камеры в системе координат, связанной с конструкцией КА, пересчитывают для этой системы координат. После чего при известной геометрии объектива определяют пространственное положение множества лучей, проходящих через выбранные точки изображения и точку фокуса объектива. Искомые координаты точек изображения рассчитывают как координаты точек пересечения этих лучей с поверхностью планеты, например, как эллипсоида вращения.
Жестко закрепленная камера не позволяет космонавту выбирать объект съемки, находящийся вне поля зрения камеры, и ухудшает качество изображений из-за влияния вибраций корпуса КА через жесткую связь, в особенности при большом времени экспозиции.
Наиболее близким аналогом съемки ручной камерой следует считать съемку камерой, установленной на поворотной платформе, позволяющей менять пространственное положение ООО камеры относительно конструкции КА на известные или заданные углы. В этом случае при известном положении центра масс КА и известной ориентации КА в зафиксированный момент съемки определение координат изображений сводится к предыдущему случаю жестко закрепленной камеры с учетом углов поворота платформы при определении пространственного положения ООО камеры.
Недостатками способа являются:
- необходимость точного определения и выдерживания ориентации КА (эта сложность характерна для пилотируемых КА);
- ограничение свободы действий космонавта при нацеливании на объект съемки, в особенности при съемках не в надир;
- высокая стоимость и масса платформы с приводами и системой управления.
Задачей настоящего изобретения является способ, обеспечивающий определение координат при съемке камерой, не имеющей постоянной жесткой связи с конструкцией КА и свободно перемещающейся в условиях невесомости. Сохраняется свобода действий космонавта при нацеливании на объект. Положение центра масс КА в момент съемки должно быть известно. Ориентация КА не обязательно должна быть известна.
Технический результат достигается тем, что в способе определения географических координат изображений объектов на поверхности планеты при съемке с пилотируемого космического аппарата, основанном на фиксации момента съемки и определении пространственного положения съемочной камеры с учетом известного положения центра масс КА, по первому варианту определяют базовое пространственное положение свободно перемещаемой съемочной камеры по значениям положения центра масс КА и известным географическим координатам точек на одном из полученных в результате съемок изображений, одновременно в процессе съемки проводят измерения угловых скоростей поворотов съемочной камеры в инерциальной системе координат, по которым рассчитывают текущее пространственное положение съемочной камеры относительно базового положения.
В способе определения географических координат изображений объектов на поверхности планеты при съемке с пилотируемого космического аппарата, основанном на фиксации момента съемки и определении пространственного положения съемочной камеры с учетом известного положения центра масс КА, по второму варианту определяют базовое пространственное положение свободно перемещаемой съемочной камеры по значениям положения центра масс КА, известной ориентации КА в фиксированный момент времени и известному пространственному положению съемочной камеры относительно конструкции КА в этот момент, одновременно в процессе съемки проводят измерения угловых скоростей поворотов съемочной камеры в инерциальной системе координат, по которым рассчитывают текущее пространственное положение съемочной камеры относительно базового положения.
Сущность изобретения поясняется чертежом.
Для измерений угловых скоростей поворотов камеры в процессе съемки на фото- видеокамеру (1) или на ее объектив жестко крепится блок датчиков угловых скоростей (2) вместе с устройством (3), обеспечивающим фиксацию моментов съемки. Датчиков в блоке должно быть не менее трех для измерений в трех взаимно перпендикулярных плоскостях. Для удобства работы может быть предусмотрено устройство фиксации начала отсчета (6). Вся информация поступает в устройство приема (4), связанное с устройством обработки (5). Устройство обработки (5) получает от устройства приема (4) сигналы, пропорциональные угловым скоростям поворотов съемочной камеры (7), сигналы моментов съемки (8) и сигналы начала отсчета (9).
В качестве устройства приема и обработки может быть использован, например, портативный компьютер, соединенный с датчиками через стандартный интерфейс. В качестве устройства фиксации моментов съемки может быть использован в простейшем случае двухпроводный кабель, соединяющий «сухие» контакты разъема внешней фотовспышки камеры с тем же приемным устройством через стандартный интерфейс. В этом случае момент получения изображения определяется фактом замыкания «сухих» контактов разъема внешней фотовспышки при спуске затвора камеры. Устройство начала отсчета может быть реализовано, например, в виде кнопки (двух замыкающихся контактов), также соединенное с приемным устройством через стандартный интерфейс.
Если ориентация КА неизвестна (первый вариант), процесс съемки начинается с произвольного положения съемочной камеры (1) и устройство фиксации начала отсчета (6) не используется. При этом координаты хотя бы одного из изображений данной серии съемок (базового изображения) должны быть определены, например найдены на карте без использования данных от датчиков (2).
Если ориентация КА известна (второй вариант), процесс съемки может начинаться с временного перевода съемочной камеры в базовое положение, т.е. некоторое произвольное, но всегда одинаковое относительно конструкции КА положение (например, камера прижата к полу и поручню около иллюминатора). Фиксация момента, когда камера находится в базовом положении, производится или вручную с помощью устройства фиксации начала отсчета (6), или фиктивной съемкой (изображение неважно), момент которого обнаружит приемное устройство (4).
Определение координат изображений всегда проводится относительно предварительно рассчитанного базового изображения или базового положения с использованием данных от блока датчиков.
Если используется базовое изображение, пространственное положение ООО камеры в момент получения этого изображения определяется положением центра масс КА и координатами центральной точки изображения, определяемой, например, по карте.
Если используется базовое положение, пространственное положение ООО камеры определяется известным пространственным положением относительно конструкции КА как в способе-прототипе. Само базовое положение может быть однократно определено по базовому изображению, так как его можно рассматривать как изображение, полученное в момент начала измерений (при нулевых показаниях датчиков).
Исходными данными в случае съемки с базовым изображением являются:
- время базового изображения T1;
- географические координаты центра и одной из крайних точек базового изображения;
- орбитальные данные КА в момент T1;
- значения углов, рассчитанных по данным от датчиков в момент съемки T1. Например, это могут быть углы Крылова, которые в случае использования дискретных датчиков, выдающих импульсы со скоростью пропорциональной угловой скорости, определяются путем многократного умножения на матрицы элементарных разворотов (соответствующих одному импульсу) в порядке поступления импульсов.
По имеющимся орбитальным данным определяется RKA(T1) - радиус-вектор до центра масс КА в инерциальной системе координат X0Y0Z0 с началом в центре Земли и двумя осями в экваториальной плоскости для момента времени снимка T1.
Определяются два радиуса-вектора Rцентр, Rкрай в той же системе координат X0Y0Z0 от центра Земли до точек земной поверхности с заданными географическими координатами (координаты центра и одной из крайних точек базового изображения). Географические координаты преобразуются в геодезические. В качестве второй точки выбирается, например, центр левого края изображения.
Вычисляются единичные векторы (результат нормируется), определяющие положение съемочной камеры в момент снимка T1.
R11=Rцентр-RKA(T1)
R12=Rкрай-RKA(T1),
где
R11 - вектор от КА в момент T1 до центра снимка;
R12 - вектор от КА в момент T1 до края снимка.
Находятся синус и косинус угла между ними
cosα=R11*R12
sinα=sqrt(1-cosα*cosα)
Из рассчитанных углов составляется матрица разворота М0 (углы считаются углами Крылова).
Вычисляются единичные векторы
r11=М0*R01
r12=M0*R02,
где
R01 - единичный вектор оси объектива в момент обнуления измерений Т0 (вектор 0, 1, 0).
R02 - единичный вектор крайней точки (вектор 0, cos α, sin α).
r11, r12 - это те же векторы R11, R12, но в другой системе координат - инерциальной системе координат X1Y1Z1, совпадающей со строительными осями съемочной камеры в момент фиксации начала измерений Т0.
Имея координаты одних и тех же векторов в двух системах координат с помощью ортов составляется матрица M1 преобразования из системы координат X1Y1Z1 в X0Y0Z0.
Исходными данными при определении координат остальных изображений относительно базового изображения являются:
- время очередной съемки Т2;
- орбитальные данные КА в момент Т2;
- рассчитанные углы в момент съемки Т2.
Из рассчитанных углов составляется матрица разворота М2 (углы считаются углами Крылова).
Определяется единичный вектор ООО камеры в момент Т2 в инерциальной системе координат X0Y0Z0
r=M1*M2*R01
По имеющимся орбитальным данным определяется RKA(Т2) - радиус-вектор до центра масс КА в инерциальной системе координат X0Y0Z0 для момента времени снимка Т2.
Определяется радиус-вектор до центральной точки снимка
rцентр=RKA(T2)-r
С учетом модели планеты как эллипсоида вращения определяются географические координаты центра снимка, т.е. определяются полярные координаты
радиуса-вектора rцентр.
При определении пространственного положения ООО камеры с использованием базового положения исходными данными являются:
- время фиксации начала измерений Т0;
- орбитальные данные КА в момент Т0;
- ориентация КА в момент Т0 как матрица М3 разворотов из инерциальной системы координат в систему, связанную с осями КА.
Расчет базового положения проводится однократно как расчет съемки, выполненной в момент Т0 при нулевых углах Крылова (при нулевых показаниях датчиков) по приведенным ранее формулам.
Определяются единичные векторы из КА до центра изображения и до одной из крайних точек изображения
R21=M1*M2*R01
R22=M1*M2*R02
Определяются единичные векторы-константы для данного базового положения, определяющие положение камеры относительно конструкции КА
K1=М3*R21
К2=M3*R22
При определении координат остальных изображений относительно базового положения исходными данными являются:
- единичные векторы-константы К0, K1, рассчитанные выше;
- время фиксации начала измерений Т2;
- время съемки Т3;
- орбитальные данные КА в момент Т3;
- рассчитанные углы в момент съемки Т3;
- ориентация КА в момент Т2 как матрица М4 разворотов из инерциальной системы координат в систему, связанную с осями КА.
Рассчитываются единичные векторы V1, V2 начального положения камеры в инерциальной системе координат Х0Y0Z0 для момента времени Т2
V1=M4*K1
V2=М4*К2
Зная координаты этих же векторов как R01R02 (0, 1, 0 и 0, cos α, sin α) в системе координат X2Y2Z2, совпадающей со строительными осями съемочной камеры, в момент Т2 с помощью направляющих ортов составляется матрица M5 преобразования из системы координат X2Y2Z2 в X0Y0Z0.
Из измеренных углов составляется матрица разворота М6 (углы считаются углами Крылова).
Вычисляется вектор R03 положения ООО в момент времени снимка Т3 и в системе координат X2Y2Z
R03=М6*R01
Вычисляется единичный вектор R04 положения ООО в момент времени Т3 в инерциальной системе X0Y0Z0
R04=M1*R03
По имеющимся орбитальным данным определяется RKA(Т3) - радиус-вектор до центра масс КА в инерциальной системе координат X0Y0Z0 для момента времени съемки Т3.
Определяется радус-вектор до центральной точки изображения
rцентр=RKA(Т3)-R04
С учетом модели планеты как эллипсоида вращения определяются географические координаты центра изображения, т.е. определяются полярные координаты радиуса-вектора rцентр.
Изобретение относится к космической технике. Целью изобретения является съемка Земли и других планет с помощью ручных фото- и видеокамер экипажами пилотируемых космических аппаратов (КА). Задачей изобретения является определение координат при съемке камерой, не имеющей жесткой связи с конструкцией КА и свободно перемещающейся в условиях невесомости. Суть изобретения в измерении угловых скоростей поворотов камеры в процессе съемки с помощью блока датчиков, устанавливаемых на камере, и расчете пространственного положения камеры относительно базового положения. Рассматривается вариант расчета базового положения по известным координатам одного из изображений и известному положению центра масс аппарата и вариант расчета базового положения по известному положению центра масс и известной ориентации аппарата. 2 н.п. ф-лы, 1 ил.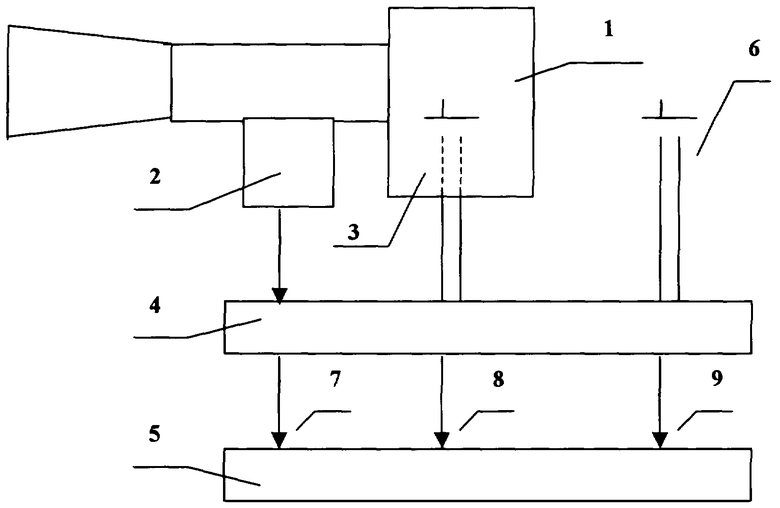
1. Способ определения географических координат изображений объектов на поверхности планеты при съемке с пилотируемого космического аппарата (КА), основанный на фиксации момента съемки и определении пространственного положения съемочной камеры, включая углы поворота, известного положения центра масс КА, отличающийся тем, что определяют базовое пространственное положение свободно перемещаемой съемочной камеры по значениям положения центра масс КА и известным географическим координатам точек на одном из полученных в результате съемок изображений, одновременно в процессе съемки проводят измерения угловых скоростей поворотов съемочной камеры в инерциальной системе координат, по которым рассчитывают текущее пространственное положение съемочной камеры, включая углы поворота, относительно базового положения, на основании которого рассчитывают географические координаты исследуемого объекта на поверхности планеты.
2. Способ определения географических координат изображений объектов на поверхности планеты при съемке с пилотируемого космического аппарата, основанный на фиксации момента съемки и определении пространственного положения съемочной камеры, включая углы поворота, известного положения центра масс КА, отличающийся тем, что определяют базовое пространственное положение свободно перемещаемой съемочной камеры по значениям положения центра масс КА, известной ориентации КА в фиксированный момент времени и известному пространственному положению съемочной камеры относительно конструкции КА в этот момент, одновременно в процессе съемки проводят измерения угловых скоростей поворотов съемочной камеры в инерциальной системе координат, по которым рассчитывают текущее пространственное положение съемочной камеры, включая углы поворота, относительно базового положения, на основании которого рассчитывают географические координаты исследуемого объекта на поверхности планеты.
| СИСТЕМА УПРАВЛЕНИЯ ТЕЛЕВИЗИОННЫМ ВИДЕОСПЕКТРАЛЬНЫМ КОМПЛЕКСОМ КОСМИЧЕСКОГО АППАРАТА | 1992 |
|
RU2068801C1 |
| СПОСОБ ОПЕРАТИВНОГО ИССЛЕДОВАНИЯ АТМОСФЕРЫ, ЗЕМНОЙ ПОВЕРХНОСТИ И ОКЕАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2254600C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ОБЪЕКТА | 2000 |
|
RU2182713C2 |
| АСТРОНОМИЧЕСКИЙ КОРРЕКТОР КООРДИНАТ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2000 |
|
RU2207305C2 |

