Предпосылки изобретения
Изобретение относится к области тяговых двигателей, в которых ротор несет поворотные элементы.
Один тип тягового двигателя, который, в частности, используется в авиации, известен как двигатель с открытым ротором или двигатель с открытым вентилятором.
В таком типе двигателя ротор несет множество лопастей, которые могут быть повернуты для того, чтобы изменить их шаг относительно ротора. Таким образом, предоставляется один или несколько приводов для изменения шага лопастей. В зависимости от шага, который должен быть задан для лопастей, и в зависимости от аэродинамических нагрузок, которые оказывают влияние на лопасти, привод может иметь необходимость действовать либо как мотор, либо как тормоз.
В качестве примера привод может быть электрическим приводом. В соответствии с этими обстоятельствами он должен быть снабжен электропитанием, когда он работает в качестве мотора, при этом ему также необходимо возвращать мощность, которую он передает, когда работает в качестве тормоза.
Для этой цели известна для использования цепь электропитания, соединяющая источник электричества с приводом. Цепь электропитания содержит шину электропитания постоянного тока (DC) и выпрямитель/инвертор, соединяющий шину с приводом. Когда привод работает в качестве мотора, шина передает питание от источника к выпрямителю/инвертору, который затем работает в качестве инвертора и питает привод напряжением переменного тока (AC). Когда привод работает в качестве тормоза, напряжение переменного тока, переданное приводом, выпрямляется выпрямителем/инвертором и рассеивается в рассеивающем сопротивлении, соединенном с шиной электропитания.
Такое решение представляет несколько недостатков.
Прежде всего для источника электричества должны быть определены такие размеры, чтобы допускать передачу питания, необходимую приводу для выполнения работы мотора с большой амплитудой. Типично источник должен передавать пиковую мощность, например 3300 ватт (Вт). Такая мощность является значительно большей мощности, требуемой приводом для выполнения незначительных позиционирующих передвижений на длительной основе, где эта мощность типично имеет порядок 500 Вт. Такую высокую мощность необходимо передать от статора к ротору, что приводит к ограничениям в конструкции.
Более того, учитывая небольшую величину рассеивания, возникающую в результате передвижения лопастей, и высокий уровень эффективности привода, основная часть мощности, переданная источником, когда привод работает в качестве мотора, должна быть рассеяна в рассеивающем сопротивлении, в то время когда привод работает в качестве тормоза. Типично, используя вышеприведенные значения, сопротивление должно быть способным рассеивать пиковую мощность 2800 Вт и мощность при длительной работе 300 Вт.
В заключение, известно, что к тяговым двигателям применимы правила сертификации, которые требуют предоставления дублирования для любой электрической системы, которая влияет на тяговую силу. Таким образом, необходимо предоставить дублирование источника, шины электропитания, рассеивающего сопротивления и выпрямителя/инвертора. Следовательно, необходимо предоставить два рассеивающих сопротивления, даже когда установочные ограничения приводят к тому, что доступные объемы являются относительно небольшими, таким образом также оказывают влияние на размер теплообменных устройств и/или рассеивающих устройств.
В документе US 2008/0308685 описан питаемый солнечной энергией самолет типа "летающее крыло", имеющий винты с лопастями изменяемого шага. Тем не менее этот документ не описывает подробно моторы, использованные для управления этими винтами. В частности, этот документ не описывает электрический привод, несомый ротором винтов. Более того, маховики, описанные в этом документе, располагаются внутри конструкции самолета типа "летающее крыло". Таким образом, этот документ не предоставляет решение для задачи высокого пикового питания, которое должно быть передано от статора к ротору для того, чтобы питать электрический привод поворотной лопасти, несомой ротором.
Таким образом, в настоящее время существует необходимость в решении, которое даст возможность более эффективно осуществлять приведение в действие поворотного компонента ротора двигателя.
Задача и сущность изобретения
С этой целью изобретение предоставляет устройство привода для приведения в действие поворотного компонента, несомого ротором тягового двигателя, причем устройство привода содержит:
- по меньшей мере, один источник электричества;
- электрический привод для поворота упомянутого поворотного компонента; и
- цепь электропитания, соединяющую упомянутый источник электричества с упомянутым приводом;
причем устройство привода, отличается тем, что оно дополнительно содержит инерционное устройство, соединенное с упомянутой цепью электропитания, причем упомянутое инерционное устройство является подходящим для преобразования электрической энергии, поступающей от упомянутой цепи электропитания, в механическую энергию для сохранения упомянутой механической энергии и для преобразования упомянутой механической энергии в электрическую энергию для упомянутой цепи электропитания.
Посредством этих характеристик, когда привод работает в качестве мотора, по меньшей мере, часть энергии может быть передана инерционным устройством. Таким образом, источнику электричества не требуется определять такие размеры, чтобы допускать передачу максимальной мощности, которая может быть необходима приводу. Более того, когда привод работает в качестве тормоза, по меньшей мере, часть энергии, которую он передает, может быть сохранена инерционным устройством. Таким образом, рассеивание энергии может быть ограничено. Нет необходимости в том, чтобы предоставлять рассеивающее сопротивление.
Устройство привода может содержать второй источник электричества и вторую цепь электропитания, причем упомянутое инерционное устройство соединено с упомянутой второй цепью электропитания, упомянутое инерционное устройство является подходящим для преобразования электрической энергии, поступающей от упомянутой второй цепи электропитания, в механическую энергию и для преобразования упомянутой механической энергии в электрическую энергию для упомянутой второй цепи электропитания. Это дает возможность предоставить дублирование цепи электропитания, причем инерционное устройство является общим для обеих цепей электропитания.
В этом варианте осуществления цепь электропитания содержит:
- шину электропитания постоянного тока, соединенную с источником электричества;
- первый выпрямитель/инвертор, соединенный, во-первых, с шиной электропитания и, во-вторых, с упомянутым электрическим приводом; и
- второй выпрямитель/инвертор, соединенный, во-первых, с упомянутой шиной электропитания и, во-вторых, с упомянутым инерционным устройством.
В таких обстоятельствах устройство привода может содержать устройство управления, подходящее для управления упомянутым инерционным устройством в зависимости от разности между напряжением, переданным источником электричества, и напряжением шины электропитания.
В варианте осуществления инерционное устройство содержит вращающийся компонент, причем устройство управления является подходящим для управления упомянутым инерционным устройством в зависимости от разности между скоростью вращения упомянутого вращающегося компонента и заданной скоростью.
Устройство управления может быть подходящим для определения заданной величины крутящего момента, причем упомянутое устройство управления включает в себя ограничитель крутящего момента.
Инерционное устройство может включать в себя электрический мотор, имеющий внутренний или внешний ротор. Электрический мотор может представлять маховик.
Изобретение также предоставляет тяговый двигатель, имеющий ротор, переносящий, по меньшей мере, одну поворотную лопасть, причем упомянутый тяговый двигатель включает в себя устройство привода вышеупомянутого изобретения, при этом привод устройства привода соединен с упомянутой лопастью.
В таких обстоятельствах цепь электропитания и инерционное устройство могут переноситься упомянутым ротором.
Краткое описание чертежей
Другие характеристики и преимущества настоящего изобретения следуют из выполненного ниже описания, со ссылкой на прилагаемые чертежи, которые показывают вариант осуществления, не обладающий ограничивающим характером. На фигурах:
- фиг. 1 представляет собой схему устройства привода в варианте осуществления изобретения; и
- фиг. 2 показывает участок фиг. 1 устройства привода.
Подробное описание варианта осуществления
Фиг. 1 представляет собой схему устройства 1 привода в варианте осуществления изобретения. Устройство 1 привода предназначено для поворота поворотного компонента, несомого ротором тягового двигателя (не показан). Например, устройство привода служит для изменения шага лопастей типа двигателя с открытым ротором или двигателя с отрытым вентилятором.
Устройство 1 привода имеет два источника 2, 2' электричества, привод 3, две цепи 4, 4' электропитания и инерционное устройство 5.
Каждый из источников 2, 2' электричества служит для подачи энергии к каждой из цепей 4, 4' электропитания. Источники 2, 2' электричества имеют характерный признак, заключающийся в необходимости иметь возможность пропускать энергию от неподвижной системы отсчета к вращающейся системе отсчета (к ротору двигателя), вращающейся со скоростью, которая может быть равной, например, 900 оборотов в минуту (об/мин). Это ограничение влияет на требуемые размеры, что является чрезвычайно критичным в терминах мощности, которая должна быть передана. Однако, как разъяснено ниже, устройство 1 привода не требует чрезвычайно высокой мощности. Таким образом, для источников 2, 2' электричества могут быть определены размеры для ограниченной мощности.
Привод 3 содержит электрический мотор 6, механическую трансмиссию 7 и датчики 8, 8', 9 и 9'.
В качестве примера электрический мотор 6 имеет бесщеточный трехфазный синхронный тип и обладает постоянными магнитами. Он может работать в качестве генератора электричества, когда он приводится в движение механически. Электрические участки электрического мотора 6 предоставляются с дублированием, как представлено на фиг. 1, линией, подразделяющей электрический мотор на два участка. Дублирование для мотора может быть полным (два ротора и два статора друг за другом), или это может быть мотор, имеющий два паза статора.
Механическая трансмиссия 7 соединяет привод 3 с поворотным компонентом ротора двигателя. С этой целью и в качестве примера механическая трансмиссия 7 может либо преобразовывать вращательное движение в другое вращательное движение, но с отличной скоростью, либо иначе она может преобразовывать вращательное движение в поступательное движение.
Датчики 8, 8' измеряют угловое положение вала электрического мотора 6. Они соединены с соответствующими устройствами 13, 13' управления для управления электрическим мотором 6. Датчики 9, 9' измеряют местоположение на выходе из механической трансмиссии 7 (положение при вращении или перемещении). Они также соединены с соответствующими устройствами 13, 13' управления, посредством чего делают возможным добиться точного следящего управления положением. Более подробно работа устройств 13, 13' управления описана ниже. Привод 3 также может включать в себя другие датчики (не показаны), например, для измерения температуры с тем, чтобы осуществить подходящий мониторинг.
Цепь 4 электропитания содержит шину 10 электропитания постоянного тока, первый выпрямитель/инвертор 11, второй выпрямитель/инвертор 12 и два интерфейса 15. Подобным образом цепь 4' электропитания содержит шину 10' электропитания, первый выпрямитель/инвертор 11', второй выпрямитель/инвертор 12' и два интерфейса 15'. Ниже более подробно описана цепь 4 электропитания, причем цепь 4' электропитания предоставлена с дублированием.
Как показано на фиг. 1, интерфейсы 15 служат для соединения шины 10 электропитания либо с источником 2 электричества, либо с источником 2' электричества. Таким образом, в случае, когда выходит из строя один из источников 2, 2' электричества, или в случае, когда выходит из строя одна из цепей 4, 4' электропитания, устройство 1 привода может остаться работоспособным. Как более подробно показано на фиг. 2, интерфейс 15 содержит переключатель 16, ограничитель 17 тока и однонаправленный элемент 18.
Шина 10 электропитания соединяет интерфейсы 15 с выпрямителем/инвертором 11 и с выпрямителем/инвертором 12.
Выпрямитель/инвертор 11 соединен с приводом 3. Известным образом он подходит для работы в качестве инвертора, т.е. для преобразования напряжения постоянного тока шины 10 электропитания в трехфазное напряжение для питания привода 3, а также подходит для работы в качестве выпрямителя, т.е. для преобразования трехфазного напряжения, переданного приводом 3, в напряжение постоянного тока шины 10 электропитания. Режим работы зависит от управления продолжительностями включения.
Выпрямитель/инвертор 12 соединен с инерционным устройством 5. Он подходит для работы в качестве инвертора, т.е. для преобразования напряжения постоянного тока от шины 10 электропитания в трехфазное напряжение для питания инерционного устройства 5. Он также подходит для работы в качестве выпрямителя, т.е. для преобразования трехфазного напряжения, переданного инерционным устройством 5 в напряжение постоянного тока шины 10 электропитания.
Инерционное устройство 5 содержит вращающийся компонент типа маховика, подходящий для накопления кинетической энергии. Таким образом, инерционное устройство 5 может содержать бесщеточный синхронный электрический мотор. Например, инерционное устройство 5 содержит электрический мотор, имеющий внутренний ротор, который включает в себя маховик. В одном варианте инерционное устройство 5 содержит электрический мотор, имеющий внешний ротор. В таких обстоятельствах ротор может иметь достаточную инерцию для того, чтобы не было необходимости в маховике. Электрический мотор инерционного устройства 5 предпочтительно предоставляется с дублированием, при этом один участок соединен с выпрямителем/инвертором 12, а другой участок соединен с выпрямителем/инвертором 12'.
Инерционное устройство 5 предпочтительно размещено соосно вокруг центра вращения ротора для того, чтобы ограничить механические напряжения, связанные с центробежным ускорением.
Как объяснено выше, устройство 1 привода также имеет устройства 13, 13' управления. Более точно, устройство 13 управления имеет первый участок, который, в частности, соединен с датчиками 8 и 9, а также с цепью для управления выпрямителем/инвертором 11 и приводом 6, и второй участок, который соединен с цепью для управления выпрямителем/инвертором 12. Первый участок устройства управления, таким образом, служит для управления приводом 6, а второй участок служит для управления инерционным устройством 5. Устройство 13 управления, несомое ротором двигателя, также соединено с цепью 14 передачи, предоставляющей связь с неподвижным участком. Устройство 13' управления предоставляет дублирование для устройства 13 управления. Таким образом, оно имеет первый участок, который соединен, в частности, с датчиками 8' и 9', с цепями управления для выпрямителя/инвертора 11' и с приводом 6, и второй участок, который соединен с цепью управления для выпрямителя/инвертора 12'. Устройство 13' управления также соединено с цепью 14' передачи.
Устройства 13 и 13' управления показаны на фиг. 1 в качестве модульных устройств. Однако каждый из участков устройств 13 и 13' управления может быть образован из отдельных объектов, например в форме цифровых цепей на основе принципа программируемой логики (программируемой вентильной матрицы (FPGA),...) или на принципе одного или нескольких процессоров, включающих в себя управляющие программы. В одном варианте устройства 13 управления могут быть реализованы в форме специальных интегральных схем.
Работа устройства 1 привода описана ниже со ссылкой на цепь 4 электропитания. Конечно, эта работа предоставлена с дублированием при помощи цепи 4' электропитания.
Когда привод 3 должен действовать в качестве мотора для того, чтобы повернуть лопасти за счет движения, которое требует мощность, устройство 13 управления управляет выпрямителем/инвертором 11 для передачи требуемого напряжения переменного тока. Энергия поступает через шину 10 электропитания от источника 2 или 2' электричества и/или от инерционного устройства 5. Устройство 13 управления может работать параллельно для того, чтобы принудить вращающийся компонент инерционного устройства 5 замедлиться и чтобы преобразовать генерируемое напряжение переменного тока в напряжение постоянного тока для выпрямителя/инвертора 12.
Когда привод 3 должен работать в качестве тормоза для того, чтобы принудить лопасти повернуться с перемещением, которое генерирует питание, устройство 13 управления управляет выпрямителем/инвертором 11 для преобразования напряжения переменного тока, переданного приводом 3, в напряжение постоянного тока. Параллельно устройство 13 управления управляет выпрямителем/инвертором 12 для приема питания, передаваемого к шине 10 электропитания и для преобразования его в напряжение переменного тока для того, чтобы ускорить вращающийся компонент инерционного устройства 5.
Таким образом, когда привод 3 работает в качестве мотора, необходимое питание не полностью передается источниками 2 или 2' электричества, и в результате их размеры могут быть определены ограничительным образом. Более того, во время работы привода 3 в качестве тормоза, мощность, которую он генерирует, не должна быть рассеяна в рассеивающем сопротивлении. В таком случае оно может быть преобразовано и сохранено для последующего повторного использования.
Следовательно, источникам 2 и 2' электричества требуется подавать лишь среднюю мощность, соответствующую потерям цепей управления и инерционного устройства 5. Типично в одном примере определения размеров, мощность, которую необходимо передавать источникам 2, 2', может составлять 275 Вт вместо пиковых 3300 Вт и непрерывных 500 Вт для решений предшествующего уровня техники.
Более того, рассеяние энергии соответствует по существу потреблению цепей управления и рабочим потерям выпрямителя/инвертора 11, 11', 12, 12'. Типично рассеивание энергии составляет 75 Вт, например, по сравнению с 350 Вт в решениях предшествующего уровня техники.
Далее следует описание примера определения размеров для инерционного устройства 5. Оценка дается для приведения в действие лопастей при большой амплитуде, типично требующей около 1 килоджоуля (кДж). Если выбирается рабочий диапазон от 5000 об/мин до 7000 об/мин для скорости вращения вращающегося компонента инерционного устройства 5, тогда является достаточным момент инерции 0,010 килограмм на квадратный метр (кг·м2). Такой момент инерции легко получить при помощи электрического мотора, имеющего внутренний ротор и маховик, или с помощью электрического мотора, имеющего внешний ротор. Крутящий момент, производимый на этом диапазоне скоростей, ограничен 7 ньютон-метрами (Нм) - 8 Нм. Работа с низкой скоростью также служит для ограничения магнитных потерь и вентиляционных потерь воздушного зазора.
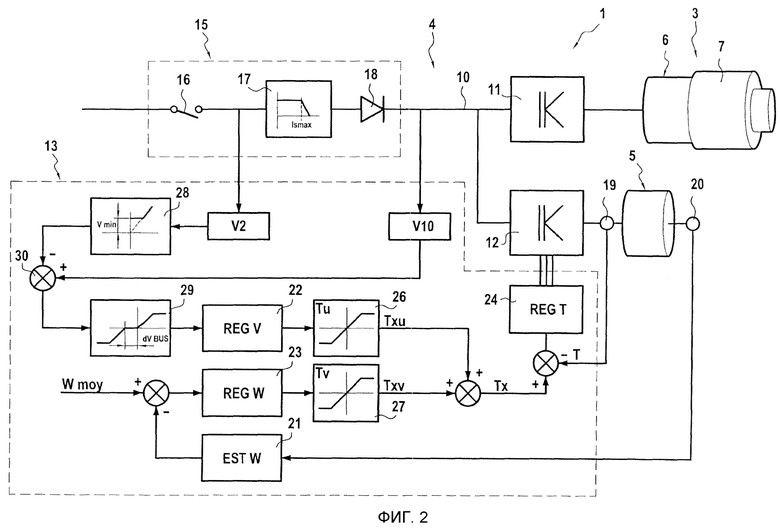
На фиг. 2 показаны некоторые элементы фиг. 1. Более того, в устройстве 13 управления на схеме показан пример способа управления, который может быть реализован вторым участком устройства 13 управления, т.е. участком, который управляет выпрямителем/инвертором 12 для инерционного устройства 5. Этот пример описывается ниже. Первый участок устройства 13 управления сам может традиционным образом реализовывать контур регулирования крутящего момента, который действует под влиянием контура регулирования скорости, который сам действует под влиянием контура регулирования положения.
Дополнительно к упомянутым выше датчикам устройство 13 управления соединено с датчиком (не показан), который измеряет напряжение V2, передаваемое источником 2 или 2' электричества, и с датчиком (не показан), измеряющим напряжение V10 шины 10 электропитания. Напряжение V10 может отличаться от напряжения V2, если напряжение V10 падает из-за того, что выпрямитель/инвертор 11 потребляет ток, больший, чем предел Ismax ограничителя 17 тока. Таким образом, максимальная мощность, которую может передать источник, равна V2·Ismax.
Устройство 13 управления также соединено с датчиком 19, измеряющим электрические токи в инерционном устройстве 5, посредством чего возможно определить крутящий момент Т инерционного устройства 5, а также с датчиком 20, измеряющим скорость вращения W инерционного устройства 5. В одном варианте вместо датчика 20 устройство 13 управления может оценивать скорость вращения W посредством устройства 21 оценки, подходящего для вычисления скорости вращения W в зависимости от переменных, сохраненной устройством управления 13.
Устройство 13 управления реализует контур регулирования, который, в частности, использует регулятор 22 напряжения, регулятор 23 скорости и регулятор 24 крутящего момента или тока.
Регулятор 23 скорости в качестве его входных данных имеет разность между заданной скоростью Wmoy и скоростью вращения W инерционного устройства 5, которая измерена датчиком 20, или которая оценена устройством 21 оценки. Выходные данные от регулятора 23 скорости представляют собой первый заданный крутящий момент Txv, ограниченный ограничителем 27 крутящего момента к диапазону значений от -Tv до +Tv. Пороговое значение Tv выбирается таким образом, что:
Wmoy·Tv<(V2·Ismax - потери цепи управления)
Таким образом, благодаря питанию, переданному источниками 2, 2' электричества, всегда возможно передать максимальный крутящий момент, который может потребовать регулятор 23 скорости.
Входные данные для регулятора 22 напряжения зависят от разности между напряжением V2 и напряжением V10. Таким образом, регулятор 22 напряжения передает второй заданный крутящий момент Txu, который ограничен ограничителем 26 крутящего момента к диапазону значений от -Tu до +Tu. Такое заданное значение стремится уменьшить разность между напряжениями V2 и V10 за счет задания направления и амплитуды при передаче мощности между шиной 10 электропитания и инерционным устройством 5. Эта мощность находится близко к результату умножения скорости W вращения на крутящий момент Т. Таким образом, максимальная переданная мощность равна Wmax·Tu, где Wmax представляет собой максимальную скорость вращения инерционного устройства 5. Регулятор 22 напряжения представляет собой пропорционально интегральный (ПИ) или пропорционально интегрально дифференциальный (ПИД) тип.
Входные данные для регулятора 22 напряжения не обязательно равны разности между напряжением V2 и напряжением V10.
Модуль 29 обнуляет выходные данные к регулятору 22 мощности, когда разность между напряжениями V10 и V2 является меньшей, чем пороговое значение dVbus. До тех пор, пока требуемая мощность на шине 10 электропитания меньше, чем мощность V2·Imax, ограничитель 17 тока не действует, а напряжение V10 лишь немного меньше, чем V2. В таких обстоятельствах регулятор 22 мощности не управляет крутящим моментом. Таким образом, модуль 29 обеспечивает возможность того, чтобы можно было избежать представления энергии от инерционного устройства 5 до тех пор, пока источник 2 или 2' электричества способен передавать мощность, требуемую от шины 10 электропитания. В ином случае, как только ток, требуемый от шины 10 электропитания, превышает Ismax, ограничитель 17 тока начинает действовать и разность между напряжениями V2 и V10 превышает dVbus. В таких обстоятельствах регулятор 22 напряжения требует крутящий момент Txu от инерционного устройства 5, стремясь уменьшить эту разность.
Более того, модуль 28 расположен перед элементом 30, который определяет разность между напряжениями V2 и V10. Модуль 28 предоставляет постоянное напряжение Vmin, когда напряжение V2 меньше, чем Vmin, например в случае выхода из строя источников 2, 2' электричества. Таким образом, в этих обстоятельствах, даже если напряжения V2 и V10 представляют собой ноль или практически ноль, входные данные к регулятору 22 скорости равны Vmin-dVbus, и регулятор 22 скорости требует тормозного момента Txv, имеющего эффект, заключающийся в снабжении энергией шины 10 электропитания от инерционного устройства 5. Таким образом, до тех пор, пока это возможно, энергия, сохраненная в инерционном устройстве, шина 10 электропитания может снабжаться электропитанием.
Заданные значения Txv и Txu для крутящего значения для регулятора 23 скорости и регулятора 22 напряжения складываются для определения общего заданного значения крутящего момента Tx. Входные данные для регулятора 24 крутящего момента соответствуют разности между общим заданным значением Tx крутящего момента и крутящим моментом T, измеренным датчиком 19. Регулятор 24 крутящего момента работает в двух квадрантах, т.е. только в одном направлении вращения с двумя направлениями крутящего момента.
Динамический отклик регулятора 22 напряжения является более быстрым, чем отклик регулятора 23 скорости. Кроме того, величина Tu является значительно большей, чем величина Tv. Таким образом, регулятор 22 напряжения имеет приоритет над регулятором 23 скорости. Другими словами, крутящий момент от инерционного устройства 5 главным образом определяется в зависимости от разности между напряжениями V2 и V10.
Устройство 1 привода при управлении устройством 13 управления способом, описанным выше, работает, как следует ниже.
В течение этапов, на которых привод 3 работает при нулевой мощности или при низком уровне мощности мотора, т.е. когда мощность, потребляется элементами, соединенными с шиной электропитания 10, меньше, чем V2·Ismax:
- Если скорость вращения W равна заданной скорости Wmoy, регулятор 22 напряжения не запрашивает какого-либо крутящего момента, поскольку V10-V2<dVbus. Источник 2 или 2' электричества предоставляет всю энергию, которая потребляется. Потребителями энергии являются: цепи управления для выпрямителей/инверторов 11 и 12, а также для привода 3, привод 3 и инерционное устройство 5, которое под действием регулятора 23 скорости требует мощности для того, чтобы поддерживать скорость Wmoy (компенсируя потери из-за, например, подшипников, воздушного трения, магнитных потерь и потерь от джоулевого тепла).
- Если скорость W вращения меньше, чем заданное значение Wmoy, регулятор 22 напряжения не требует какого-либо крутящего момента, поскольку V10-V2<dVbus. Источник 2 или 2' электричества передают всю энергию для потребления. Потребителями энергии являются: цепи управления для выпрямителей/инверторов 11 и 12, а также для привода 3, привод 3 и инерционное устройство 5, которое под воздействием регулятора 23 скорости требует мощность для того, чтобы ускорить скорость Wmoy. Из-за ограничителя 27 крутящего момента мощность, требуемая для ускорения, меньше чем или равна Wmoy·Tv. Пороговое значение Tv выбирается таким образом, что эта мощность меньше, чем доступная мощность (V2·Ismax - потери цепи управления).
- Если скорость вращения W больше, чем заданная скорость Wmoy, вся энергия подается инерционным устройством 5. Регулятор 23 скорости прикладывает тормозящий момент Txv к инерционному устройству 5, имеющему собственное значение, ограниченное до Tv.
Этот тормозящий момент приводит к распределению мощности между инерционным устройством 5 и шиной 10 электропитания со значением, которое близко к Txv·W. В результате напряжение V10 будет иметь тенденцию к увеличению. Такое увеличение напряжения имеет два эффекта: первый представляет собой предотвращение поступления какого-либо тока от источников 2, 2' электричества (однонаправленный элемент 18), а второй представляет собой использование регулятора 22 напряжения (V10>V2). Регулятор 22 напряжения стремится приложить крутящий момент Txu в направлении, противоположном крутящему моменту величиной Txv регулятора скорости с тем, чтобы ограничить увеличение напряжения V10. Равновесие находится в окрестности рабочей точки (Txv-Txu)·W = мощность потребления на шине 10 электропитания. Потребителями энергии являются цепи управления и привод 3.
В течение этапов, на которых привод 3 работает при высоких уровнях мощности мотора, т.е. когда мощность, потребляемая элементами, соединенными с шиной 10 электропитания, больше, чем V2·Ismax: в случае когда заданный ток поступает от шины 10 электропитания, напряжение V10 падает до значения V2-dVbus, посредством чего применяется регулятор 22 напряжения, который запрашивает тормозящий момент Txu от инерционного устройства 5 с тем, чтобы использовать сохраненную кинетическую энергию. Регулятор 23 скорости стремится поддерживать скорость за счет попытки прикладывания крутящего момента Txv противоположного моменту регулятора 22 напряжения. Однако крутящий момент Txv покрывается при Tv, который значительно меньше, чем Tu. Равновесие находится в окрестности рабочей точки: (Txu-Tv)·W+V2·Ismax = потери от цепи управления плюс мощность, потребленная приводом 3.
В течение этапов, на которых привод 3 работает в качестве генератора, а также при высокой мощности, т.е. когда мощность, переданная от привода 6 к шине электропитания, больше, чем мощность, потребленная цепью управления: в этой ситуации из-за тока, передаваемого к шине 10 электропитания, напряжение V10 становится большим, чем V2, посредством чего действует эффект блокирования любой мощности, поступающей от источника 2 или 2' электричества, и задействуется регулятор 22 напряжения. Регулятор 22 напряжения затребует крутящий момент для инерционного устройства 5 с тем, чтобы отобрать избыточную мощность, доступную от шины 10 электропитания, и сохранить энергию в форме кинетической энергии. Регулятор 23 скорости стремится поддерживать скорость за счет попытки прикладывания крутящего момента Txv против крутящего момента от регулятора 22 напряжения. При всем этом крутящий момент Txv покрывается при Tv, который значительно меньше, чем Tu. Равновесие находится в окрестности рабочей точки: (Txu-Tv)·W + потери от цепей управления = мощность, переданная приводом 3.
Конечно, в любом случае могут быть использованы другие способы для управления инерционном устройством 5 для того, чтобы преобразовать электрическую энергию, поступающую от цепи электропитания, в механическую энергию для того, чтобы запасти механическую энергию, а также для того, чтобы преобразовать механическую энергию в электрическую энергию для цепи электропитания в зависимости от работы привода 3.
Изобретение относится к области авиации, в частности к устройствам регулирования шага винта. Тяговый двигатель имеет ротор, несущий, по меньшей мере, одну поворотную лопасть и устройство привода, соединенное с лопастью для того, чтобы поворачивать лопасть. Устройство (1) привода содержит, по меньшей мере, один источник (2, 2') электричества, электрический привод (3) для поворота упомянутой лопасти и цепь (4, 4') электропитания, соединяющую источник (2, 2') электричества с упомянутым приводом (3). Устройство привода дополнительно содержит инерционное устройство, соединенное с упомянутой цепью (4, 4') электропитания, причем упомянутое инерционное устройство (5) является подходящим для преобразования электрической энергии, поступающей от упомянутой цепи (4, 4') электропитания, в механическую энергию для сохранения упомянутой механической энергии и для преобразования упомянутой механической энергии в электрическую энергию для упомянутой цепи (4, 4') электропитания. Повышается эффективность поворотного механизма лопасти двигателя. 8 з.п. ф-лы, 2 ил.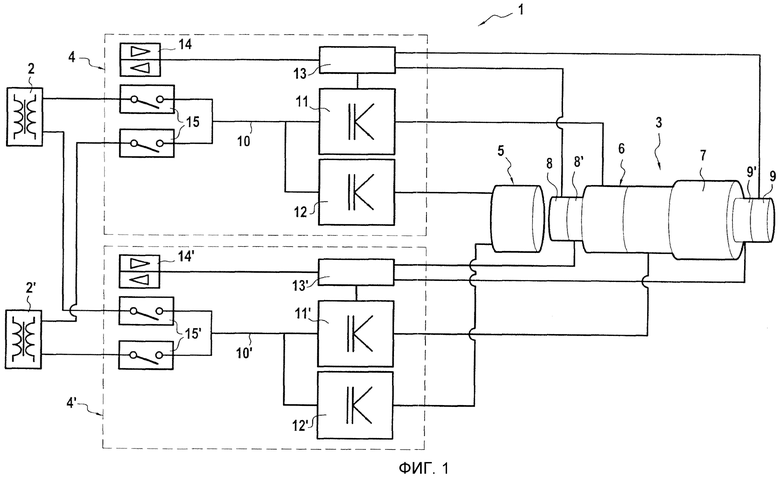
1. Тяговый двигатель, имеющий ротор, несущий, по меньшей мере, одну поворотную лопасть и устройство (1) привода, соединенное с упомянутой лопастью, причем упомянутое устройство (1) привода содержит:
- по меньшей мере, один источник (2, 2') электричества, подходящий для передачи электрической энергии от неподвижной системы отсчета к ротору;
- электрический привод (3), несомый ротором для того, чтобы направлять упомянутую лопасть; и
- цепь (4, 4') электропитания, несомую ротором и соединяющую упомянутый источник (2, 2') электричества с упомянутым приводом (3);
при этом двигатель отличается тем, что устройство привода дополнительно содержит инерционное устройство (5), несомое ротором и соединенное с упомянутой цепью (4, 4') электропитания, причем упомянутое инерционное устройство (5) является подходящим для преобразования электрической энергии, поступающей от упомянутой цепи (4, 4') электропитания, в механическую энергию для сохранения упомянутой механической энергии и для преобразования упомянутой механической энергии в электрическую энергию для упомянутой цепи (4, 4') электропитания.
2. Двигатель по п.1, в котором устройство привода дополнительно содержит второй источник (2, 2') электричества и вторую цепь (4, 4') электропитания, причем упомянутое инерционное устройство (5) соединено с упомянутой второй цепью (4, 4') электропитания, при этом упомянутое инерционное устройство (5) является подходящим для преобразования электрической энергии, поступающей от упомянутой второй цепи (4, 4') электропитания, в механическую энергию и для преобразования упомянутой механической энергии в электрическую энергию для упомянутой второй цепи (4, 4') электропитания.
3. Двигатель по п.1 или 2, в котором упомянутая цепь (4, 4') электропитания содержит:
- шину (10, 10') электропитания постоянного тока, соединенную с упомянутым источником электричества;
- первый выпрямитель/инвертор (11, 11'), соединенный, во-первых, с упомянутой шиной (10, 10') электропитания и, во-вторых, с упомянутым электрическим приводом (3); и
- второй выпрямитель/инвертор (12, 12'), соединенный, во-первых, с упомянутой шиной (10, 10') электропитания и, во-вторых, с упомянутым инерционным устройством (5).
4. Двигатель по п.3, в котором устройство привода дополнительно включает в себя устройство (13, 13') управления, подходящее для управления упомянутым инерционным устройством (5) в зависимости от разности между напряжением (V2), переданным источником электричества, и напряжением (V10) шины электропитания.
5. Двигатель по п.4, в котором упомянутое инерционное устройство (5) включает в себя вращающийся компонент, причем упомянутое устройство управления является подходящим для управления упомянутым инерционным устройством в зависимости от разности между скоростью (W) вращения упомянутого вращающегося компонента и заданной скоростью (Wmoy).
6. Двигатель по п.4 или 5, в котором устройство (13, 13') управления является подходящим для определения заданного значения (T) крутящего момента, причем устройство управления включает в себя ограничитель (26, 27) крутящего момента.
7. Двигатель по п.1, в котором упомянутое инерционное устройство (5) включает в себя электрический мотор, имеющий внутренний ротор.
8. Двигатель по п.1, в котором упомянутое инерционное устройство (5) включает в себя электрический мотор, имеющий внешний ротор.
9. Двигатель по п.7 или 8, в котором электрический мотор включает в себя маховик.
| US 5284418 A, 08.02.1994 | |||
| Способ изготовления литейныхфОРМ | 1979 |
|
SU799899A1 |
| Устройство для автоматического торможения винта самолета | 1940 |
|
SU63209A1 |
| FR 2913935 B1, 15.05.2009 | |||

