Область техники
Изобретение относится к управлению электропитанием устройства, такого как двигатель, а именно - к управлению управляющим напряжением регулятора скорости двигателя.
Уровень техники
В соответствии с топологией устройств питания регулятора скорости, высокое напряжение обеспечивается соединением последовательно некоторого числа преобразователей низкого напряжения (которые называются тогда "элементами питания" или "power cell" на английском языке) в регуляторе. Управление этими элементами питания позволяет обеспечивать напряжение с несколькими уровнями, или многоуровневое напряжения, причем каждый элемент питания добавляет напряжение, позволяющее достигнуть последовательных уровней напряжений.
Под низким напряжением понимаются, в соответствии с европейскими нормами, напряжения, заключенные между 0 и 1000 вольтами в режиме переменного напряжения и между 0 и 1500 вольтами в режиме постоянного напряжения. Под высоким напряжением, понимаются напряжения выше 1000 вольт в режиме переменного напряжения и выше 1500 вольт в режиме постоянного напряжения.
Регулятор низкого напряжения может обладать подобной структурой, но с единственным элементом питания.
Торможение заключается в передаче энергии от механической системы (вал ротора двигателя и приводная нагрузка) в электрическую систему (емкости регулятора скорости). Сумма временных производных от электрических и механических энергий системы (таким образом, соответствующих мощностей) равна, таким образом, потерянной системой мощности с противоположным знаком.
Когда двигатель является приводом приводной или инерционной нагрузки, в фазе торможения, возникает одна из следующих ситуаций:
- подаваемая механическая мощность превышает общие электрические потери, и необходимо рассеивать излишек энергии. Электроэнергия может быть тогда возвращена в электросеть, на регулятор скорости, или, альтернативно, может быть использовано тормозное сопротивление для термического рассеивания электроэнергии. При низком напряжении, тормозное сопротивление может быть помещено последовательно снаружи регулятора скорости, между регулятором и двигателем. При среднем/высоком напряжении, такое сопротивление непригодно, потому что оно было бы слишком громоздким;
- подаваемая механическая мощность ниже общих электрических потерь (работа двигателя);
- подаваемая механическая мощность равна электрическим потерям (общие потери нулевые). Таким образом, двигатель обеспечивает мощность торможения, и нет никакой необходимости рассеивать энергию.
Для управления фазой торможения, существует несколько методик. В фазе торможения, двигатель может перейти в режим генератора и возвратить электроэнергию к регулятору. Напряжение на каждом элементе питания увеличивается, тем самым, и требует управления для избегания повреждения и даже разрушения емкостей элементов питания.
Большая часть методик основана, следовательно, на измерении напряжений шины постоянного тока, DC. Эти напряжения соответствуют выпрямленным напряжениям на входе каждого из элементов питания регулятора скорости. В соответствии с этими решениями, выпрямленные напряжения согласованы, и управляющая переменная регулятора скорости становится выходным крутящим моментом двигателя. Например, фиксируя максимальное напряжение шины DC в 800В, скорость двигателя снижается до приближения к такому значению, затем выпрямленное напряжение регулируется ниже этого значения посредством снижения крутящего момента.
Вместе с тем, оказывается затруднительным и дорогостоящим измерять такие выпрямленные напряжения на каждом из элементов питания. Решения предполагают тогда, не достигая этих напряжений, зафиксировать длительность торможения на очень высоком значении, так, чтобы не провоцировать перенапряжение на емкостях элементов питания, избегая, тем самым, их повреждения. Вместе с тем, торможение двигателя при этом крайне замедлено, что не приемлемо в рамках некоторых применений.
Таким образом, существует потребность быстрого торможения двигателя, без системы рассеяния энергии, и с защитой емкостей элементов питания регулятора скорости.
Настоящее изобретение решает упомянутые выше проблемы.
Сущность изобретения
Первый аспект изобретения относится к способу регулировки торможения двигателя, питаемого регулятором скорости, причем регулятор скорости содержит множество из по меньшей мере N элементов питания низкого напряжения, соединенных последовательно, причем N превышает или равно 1, причем способ содержит следующие операции во время периода торможения двигателя:
определение по меньшей мере одного среднего напряжения двигателя за заданный период в зависимости от значений напряжений двигателя, измеренных на клеммах двигателя за заданный период;
в зависимости от упомянутого определенного среднего напряжения двигателя, определение среднего значения выпрямленного напряжения, причем выпрямленное напряжение соответствует напряжению, полученному на выходе из выпрямителя каждого элемента питания;
регулировка торможения электрического устройства в зависимости от среднего значения выпрямленного напряжения.
Таким образом, изобретение позволяет обращаться с выпрямленному напряжению (среднее значение), не требуя датчиков на каждом элементе питания.
В соответствии со способом осуществления, определение среднего значения выпрямленного напряжения - это функция среднего напряжения двигателя, опорного напряжения двигателя и опорного выпрямленного напряжения, причем опорное напряжение двигателя получают из команды, принимаемой на входе регулятора скорости и опорное выпрямленное напряжение является значением по умолчанию.
Такой способ осуществления позволяет быстро получить среднее значение выпрямленного напряжения.
В качестве варианта, способ может содержать определение по меньшей мере одного опорного напряжения двигателя, причем опорное напряжение двигателя связано со средним напряжением двигателя, измеренным посредством генерирования корректирующего напряжения двигателя, управляющее напряжение двигателя получают из опорного напряжения двигателя и корректирующего напряжения, среднее выпрямленное напряжение может быть получено из среднего напряжения двигателя, управляющего напряжения двигателя и опорного выпрямленного напряжения, причем опорное выпрямленное напряжение является значением по умолчанию.
Этот вариант осуществления позволяет получить среднее значение выпрямленного напряжения при блокировке опорного напряжения двигателя.
В соответствии с вариантом осуществления, регулировка торможения содержит сравнение среднего выпрямленного напряжения по меньшей мере с одним заданным пороговым значением, и изменение крутящего момента, приложенного к двигателю, в зависимости от результата сравнения.
Таким образом, управление торможением двигателя оптимизируется.
Кроме того, пороговое значение может быть заданным в зависимости от максимального напряжения емкостей элементов питания регулятора скорости.
Таким образом, этот способ осуществления позволяет обеспечить защиту элементов питания.
В соответствии со способом осуществления, регулировка торможения может содержать замену, на последующий период, опорного выпрямленного напряжения средним выпрямленным напряжением для определения управляющих команд для элементов питания регулятора скорости, причем опорное выпрямленное напряжение является значением по умолчанию.
Таким образом, управление элементами питания оптимизировано в процессе реализации напряжений двигателя.
В соответствии с вариантом осуществления, заданный период может быть равным периоду дискретизации опорного напряжения двигателя на входе регулятора скорости.
Такая синхронизация позволяет облегчить определение среднего выпрямленного напряжения.
В соответствии с вариантом осуществления, регулятор скорости может содержать 3*N элементов питания, с тремя фазами, каждая из которых содержит N элементов питания, соединенных последовательно, причем соответствующие выходы каждой фазы могут быть соединены звездой или треугольником с электродвигателем.
Кроме того, управляющие команды элементов питания могут быть определены из опорного напряжения двигателя и из добавочного напряжения методики, общей для трех фаз, причем добавочное напряжение методики определено так, чтобы минимизировать число коммутаций переключателей элементов питания.
Таким образом, число коммутаций переключателей элементов питания может быть минимизировано, не изменяя напряжений, приложенных к двигателю.
Второй аспект изобретения относится к компьютерной программе, исполняемой процессором и содержащей инструкции для осуществления этапов способа, когда она выполняется процессором, в соответствии с первым аспектом изобретения.
Третий аспект изобретения относится к устройству управления для регулировки торможения двигателя, питаемого регулятором скорости, причем регулятор скорости содержит N элементов питания низкого напряжения, соединенных последовательно, причем N превышает или равно 2. Устройство управления содержит:
блок, выполненный с возможностью определения, в течение периода торможения двигателя, по меньшей мере одного среднего напряжения двигателя за заданный период в зависимости от значений напряжений двигателя, измеренных на клеммах двигателя за заданный период;
блок, выполненный с возможностью определения, в зависимости от определенного среднего напряжения двигателя, среднего значения выпрямленного напряжения, причем выпрямленное напряжение соответствует напряжению, полученному на выходе из выпрямителя каждого элемента питания;
блок, выполненный с возможностью регулировки торможения электрического устройства в зависимости от среднего значения выпрямленного напряжения.
Краткое описание чертежей
Только в качестве примера варианты осуществления изобретения будут описаны в связи с чертежами, на которых:
[Фиг.1] – Фиг. 1 иллюстрирует систему управления питанием электродвигателя в соответствии с вариантом осуществления изобретения;
[Фиг.2] - Фиг. 2 иллюстрирует структуру устройства управления в соответствии с вариантами осуществления изобретения;
[Фиг.3] - Фиг. 3 иллюстрирует структуру блоков устройства управления в соответствии с вариантами осуществления изобретения;
[Фиг.4] - Фиг. 4 иллюстрирует синхронизацию между реализацией напряжений двигателя и вычислением среднего выпрямленного напряжения регулятора скорости в соответствии с вариантами осуществления изобретения;
[Фиг.5] - Фиг. 5 это диаграмма, иллюстрирующая этапы способа в соответствии с вариантами осуществления изобретения.
Подробное описание
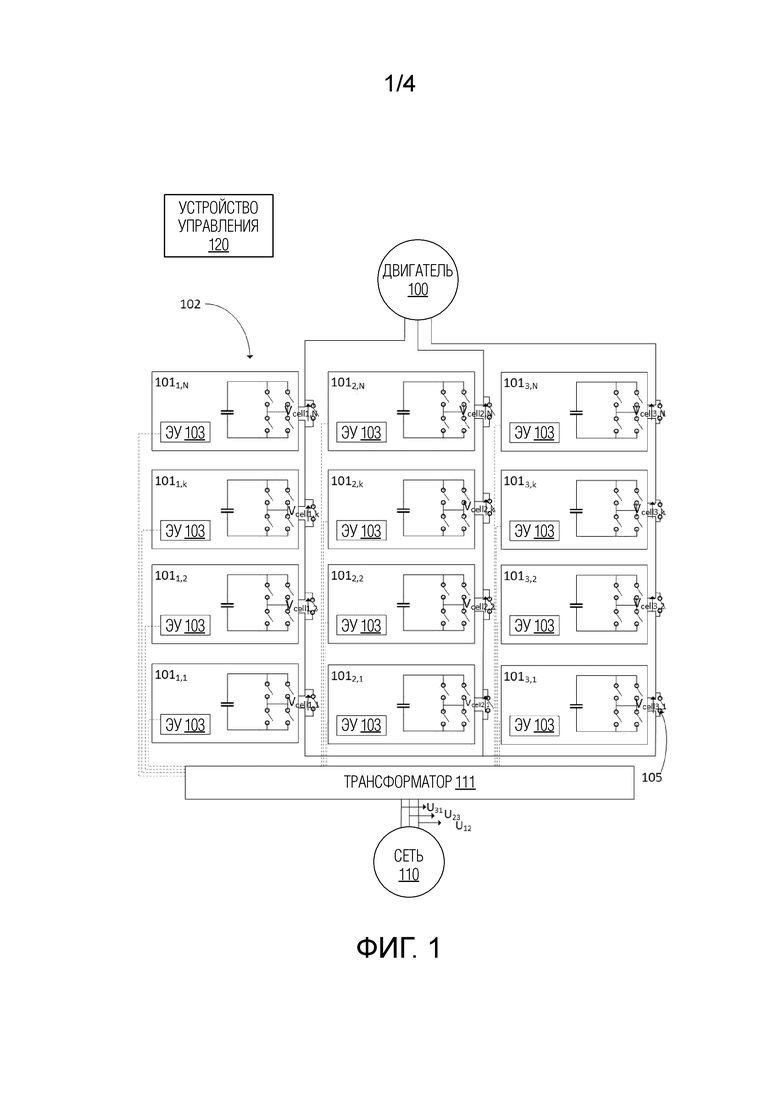
Фиг.1 представляет систему питания электродвигателя 100, такого как асинхронный двигатель, например, питаемый переменным трехфазным напряжением.
Регулятор 102 скорости содержит трансформатор 111, принимающий переменное трехфазное питание сети 110. Вторичная обмотка трансформатора 111 соединена с силовым каскадом регулятора 102 скорости. Трансформатор 111 может быть трансформатором со многими обмотками, так, чтобы подавать напряжения на несколько элементов питания, описанных ниже.
Силовой каскад регулятора 102 скорости может содержать один или несколько элементов питания 101 низкого напряжения. В случае, если двигатель принимает трехфазное питание, регулятор 102 скорости содержит 3*N элементов питания, с N элементами питания, предназначенными каждой фазе, причем N превышает или равно 1.
В случае, если N равно 1, регулятор 102 скорости - это регулятор низкого напряжения.
Каждый элемент 101 питания принимает на входе трехфазное питание, происходящее от вторичной обмотки трансформатора 111, и может содержать выпрямитель (не показан на Фиг.1) на входе, причем выпрямитель пригоден для выпрямления переменного трехфазного питания, принимаемого так, чтобы обеспечивать постоянное напряжение. Выпрямленное напряжение, полученное для каждого элемента 101 питания, называется также напряжением шины постоянного тока, DC, или напряжением шины. Выпрямитель может содержать диодный мост, тиристорный мост или в любую другую известную систему для выпрямления переменных трехфазных напряжений. Выпрямитель на входе, тем самым, является преобразователем AC/DC.
Каждый элемент питания содержит также емкость, пригодную для осуществления промежуточного емкостного фильтрования.
На выходе выпрямителя, каждый элемент 101 питания может содержать инвертор для создания сигнала широтно-импульсной модуляции PWM (для "Pulse Width Modulation" на английском языке). Такой инвертор может содержать H-мост, содержащий четыре переключателя, управляемых по парам. Электронная система питания, использующая такой принцип прерывистого напряжения, прикладывает к двигателю 120, на каждую фазу, напряжение, которое пропорционально одному или нескольким выпрямленным напряжениям. В среднем, приложенная пропорция соответствует отношению между управляющим напряжением и опорным выпрямленным напряжением (определяемым ниже). Функционирование H-моста хорошо известно и не описывается подробно в настоящей заявке.
Переключатели элемента 101 питания управляются управляющим элементом 103 элемента 101 питания.
Кроме того, система содержит устройство 120 управления, пригодное для управления электропитанием двигателя 100. Для этой цели, устройство 120 управления может управлять элементами 103 управления элементов 101 питания. Кроме того, устройство 120 управления может управлять переключателями 105, позволяя последовательно подключить подмножество из N элементов питания для каждой фазы. В качестве варианта, эти переключатели управляются устройством 120 управления при помощи элементов 103 управления.
Элементы 103 управления могут принять управляющие команды из устройства 120 управления, на основании которых элементы 103 управления могут применить пропорцию, или коэффициент заполнения, к выпрямленному напряжению, управляя переключателями H-моста. Переключатели H-моста могут быть биполярными транзисторами с изолированным затвором IGBT ("Insulated Gate Bipolar Transistor" на английском языке). Преимущество транзисторов типа IGBT заключается в том, что они имеют повышенную скорость переключения.
Трехфазные напряжения, питающие двигатель 100, получаются, тем самым, суммированием выходных напряжений PWM элементов 101 питания, для которых переключатели 105 закрыты.
Другие функции управляющего устройства будут детализированы в связи с Фиг.2-4.
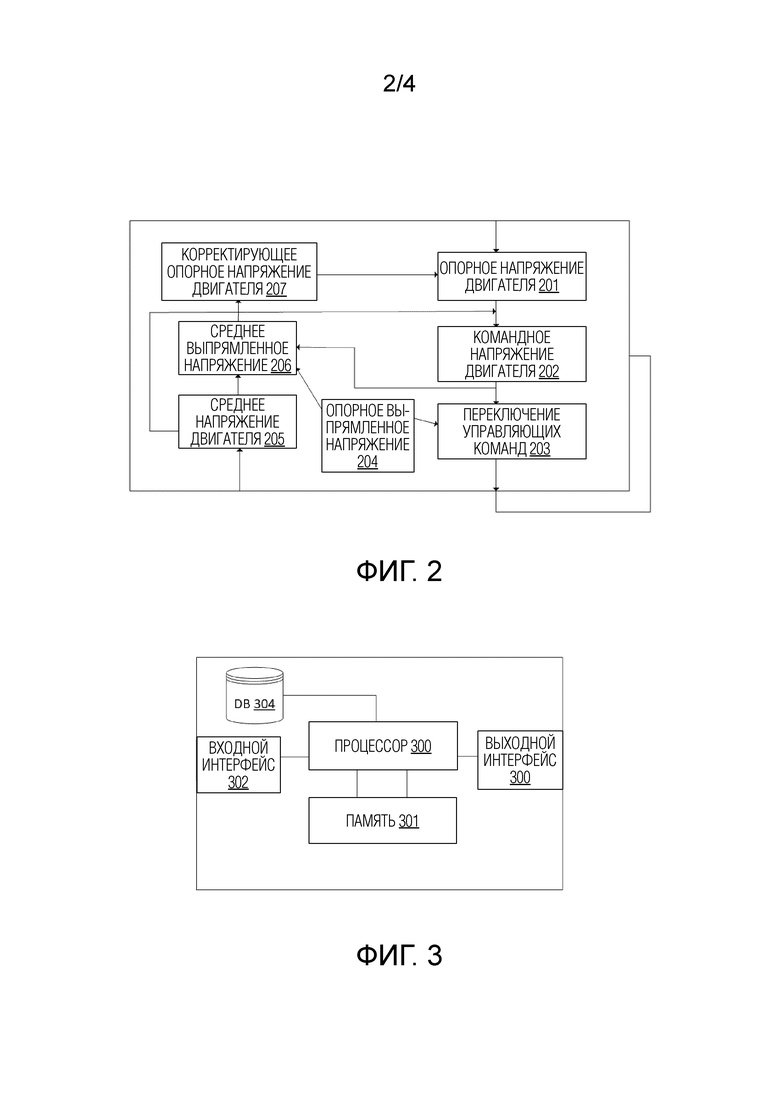
На Фиг.2 представлено устройство 120 управления в соответствии с некоторыми вариантами осуществления изобретения.
Устройство 120 управления содержит с этой целью множество блоков, предназначенных для дополнительных функций в соответствии с изобретением. Каждый блок может быть реализован программным образом, предполагая, как минимум, процессор и память, или как монолитная сборка электронных компонентов, запрограммированных для данной функции, такой как микропроцессор или ASIC, например. В качестве варианта, единственный процессор или единственная монолитная сборка выполнены с возможностью осуществления всех дополнительных функций устройства 120 управления в соответствии с изобретением.
Устройство 120 управления принимает на входе команду скорости (в частности, команду торможения, в контексте изобретения), которая обрабатывается блоком 201 вычисления опорных напряжений двигателя, выполненным с возможностью вычисления опорного напряжения двигателя на основании команды скорости. Опорные напряжения двигателя могут быть представлены вектором V123REF трех напряжений, обозначаемых как V1REF, V2REF и V3REF (одно для каждой фазы).
Исходя из опорных напряжений двигателя V123REF, блок 202 вычисления управляющих напряжений двигателя выполнен с возможностью вычисления управляющих напряжений двигателя. Управляющие напряжения двигателя могут быть представлены вектором V123CONTROL трех напряжений, обозначаемых как V1CONTROL, V2CONTROL и V3CONTROL.
Кроме того, в соответствии с изобретением, блок 202 пригоден для приема средних напряжений двигателя из блока 205, описанного ниже. Средние напряжения двигателя могут быть представлены вектором V123MEAS трех напряжений, обозначаемых как V1MEAS, V2MEAS и V3MEAS.
На основании сравнения между опорными напряжениями V123REF двигателя и средними напряжениями V123MEAS двигателя, блок 202 может определить корректирующие напряжения двигателя, представленные вектором V123CORRECTION трех корректирующих значений V1CORRECTION, V2CORRECTION и V3CORRECTION.
Устройство 120 управления содержит, кроме того, блок 203 вычисления управляющих команд для топологии импульсного управления.
Блок 203 определяет вначале командные напряжения, представленные вектором V123COMMAND трех напряжений V1COMMAND, V2COMMAND и V3COMMAND на основе управляющих напряжений V123CONTROL.
Относительно определения управляющих напряжений, блок 203 может учесть, кроме того, напряжение методики VSTRATEGY двигателя, которое является значением напряжения, соответствующего электрической нейтральной точке двигателя, позволяя использование различных методик PWM коммутации.
Добавление того же самого значения VSTRATEGY во все фазы регулятора скорости не влияет на напряжения, приложенные к двигателю. Действительно, каждая фаза регулятора 102 скорости подает потенциал Vi, i - индекс фазы, и напряжения, приложенные к двигателю, составляются в зависимости от потенциалов Vi.
В случае конфигурации звезды (архитектура которой известна и подробно не описывается), обозначая как Ui одно из напряжений, приложенных к двигателю, получаем:
Ui=Vi-(V1+V2+V3)/3;
Таким образом, значение Ui инвариантно относительно значения VSTRATEGY, которое может быть добавлено к трем выходным значениям V1, V2 и V3.
В случае конфигурации треугольника, обозначая как Ui одно из напряжений, приложенных к двигателю, получаем:
Ui=Vi-Vj, j - индекс фазы, отличной от i;
И опять, значение Ui инвариантно относительно значения VSTRATEGY, которое может быть добавлено к трем выходным значениям V1, V2 и V3.
Таким образом, в обоих случаях конфигураций звезды и треугольника добавление значения VSTRATEGY дает степень свободы для применения методики, служащей различным целям, например, максимизации амплитуды напряжения на обмотке (напряжение, составленное на выходе из регулятора), минимизации переключений, и т.д.
Блок 203 вычисляет затем управляющие команды на основании выпрямленного напряжения каждого элемента 101 питания, которое является напряжением, прерываемым затем H-мостом элемента 101 питания. Однако, как указано раньше, такое выпрямленное напряжение не измеряется непосредственно в рамках изобретения, и опорное выпрямленное напряжение VBUSDRIVE, полученное из блока 204 определения опорного напряжения используется изначально для вычисления управляющих команд.
Например, на основании командных напряжений V123COMMAND и опорного выпрямленного напряжения VBUSDRIVE, которое является значением по умолчанию, блок 203 определяет коэффициенты модуляции, представленные в виде вектора m123, содержащего значения m1, m2 и m3. Такие коэффициенты модуляции сравниваются с напряжением треугольной формы несущей частоты для последующего определения команды переключения. Каждый коэффициент модуляции m1, m2 и m3 может менять N раз значения за период несущей частоты.
Кроме того, на основании коэффициентов модуляции, блок 203 определяет команды переключения переключателей H-мостов элементов 101 питания, причем команды переключения представляются вектором T123, содержащим команды T1, T2 и T3, соответственно для каждой из трех фаз. Команды Ti являются векторами коммутации, причем каждая составляющая вектора соответствует элементу питания ветви i.
Каждая из N составляющих вектора коммутации Ti может быть получена сравнением вектора коммутации mi с напряжением треугольной формы несущей частоты, соответствующим фазе i.
Управляющие команды могут также содержать команды активации/дезактивации переключателей 105 элементов питания.
Кроме того, блок 203 выполнен с возможностью передачи управляющих команд, используемых для управления переключателями 105, для активации или дезактивации некоторых из ранее деактивированных/активированных элементов питания, и/или для управления элементами 103 управления активных элементов 101 питания для реализации PWM выходных напряжений элементов питания.
Напряжения затем практически реализуются активными элементами 101 питания регулятора 102 скорости, и реализованные напряжения представляются вектором V123REALIZED, содержащим напряжения V1REALIZED, V2REALIZED и V3REALIZED, соответствующие трем соответственным фазам.
Кроме того, устройство 120 управления содержит блок 205 вычисления средних напряжений двигателя. Блок 205 пригоден для приема непрерывных измерений, или дискретных на заданной частоте, напряжений, приложенных к двигателю. На основании измерений напряжений двигателя, принятых за заданный период, блок 205 определяет средние напряжения двигателя за заданный период, представляемые вектором V123MEAS, содержащим напряжения V1MEAS, V2MEAS и V3MEAS для трех соответственных фаз. Такой период может быть фиксированным или варьирующимся. Например, период, используемый для усреднения напряжений двигателя, может быть вычислен на основании периода дискретизации опорных напряжений V123REF двигателя, что технологически реализовать легче, чем измерение дискретизированных напряжений двигателя, в зависимости от характерных времен силового каскада (вычисление опорных напряжений двигателя и реализация напряжений для каждого силового каскада синхронизированы).
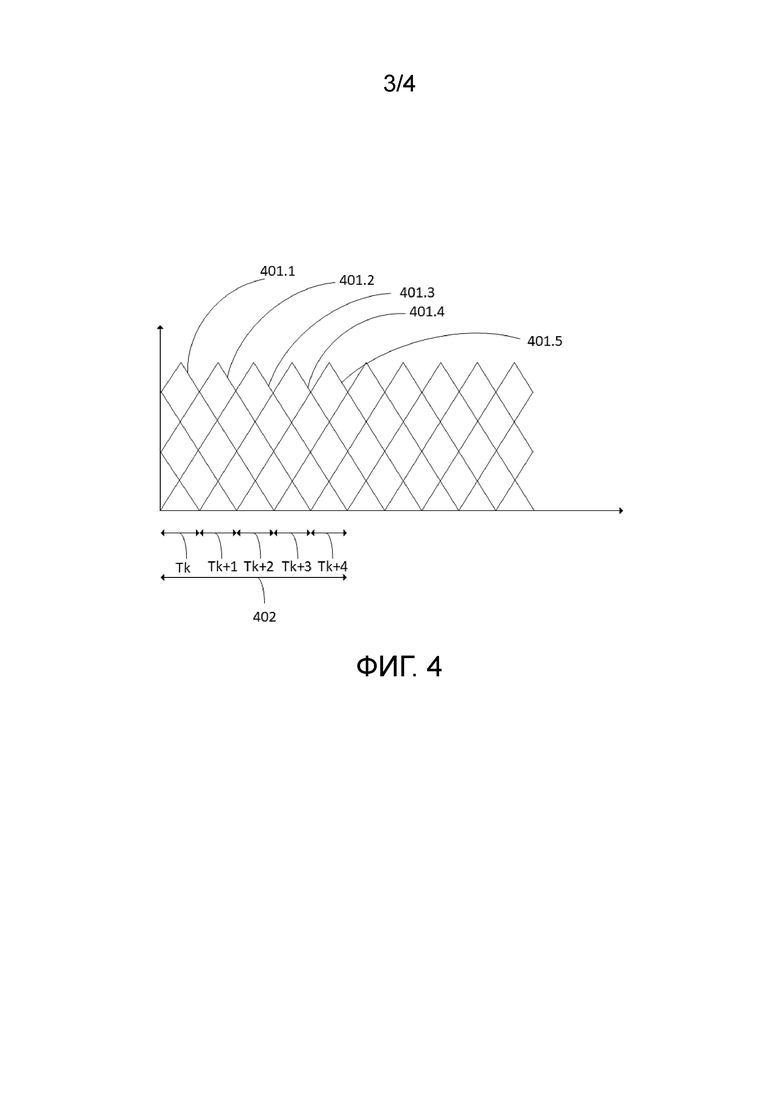
С этой целью, чертеж на Фиг.4 иллюстрирует синхронизацию между вычислением средних напряжений двигателя и реализацией напряжений силовым каскадом.
Фиг.4 представляет случай с пятью элементами питания для одной фазы регулятора скорости.
Кривые 401.1-401.5 представляют собой управляющие сигналы треугольной формы, используемые блоком 203 для генерирования команд коммутаций T123 посредством сравнения между коэффициентами модуляции mi (m1, m2 или m3) и треугольными сигналами. Каждый треугольный сигнал соответствует одному из элементов питания фазы. Такое сравнение для определения команд переключения T123 H-моста элемента питания хорошо известно и далее не описывается. Треугольные сигналы - это значения напряжений, изменяющиеся во времени (по абсциссе).
Представлены последовательные периоды от Tk до Tk+5, соответствующему пятому для периода 402 треугольных сигналов. Такой период может соответствовать длительности, для которой, в среднем, та же активная мощность выводится из каждой из трех ветвей регулятора скорости. В течение периода Tk+1:
- опорные напряжения, V123REF, управляющие напряжения V123CONTROL и командные напряжения V123COMMAND и управляющие команды T123 вычисляются на основании средних напряжений двигателя и среднего выпрямленного напряжения, полученных из периода Tk;
- управляющие команды T123, вычисленные на предыдущем этапе Tk, прикладываются к элементам питания для реализации напряжений;
- средние напряжения двигателя и среднее выпрямленное напряжение вычисляются на всем этапе Tk+1 для их использования на следующем этапе Tk+2.
Таким образом, частота дискретизации опорных напряжений V123REF двигателя может соответствовать частоте реализации PWM напряжений (частота треугольных сигналов, позволяющая реализовать модуляцию PWM в элементах 101 питания). Такая частота может быть фиксированной или может варьироваться. Например, факторы, влияющие на частоту дискретизации, могут быть:
- термическая защита силового каскада в зависимости от термического состояния регулятора 102 скорости;
- защита H-мостов элементов 101 питания, содержащих переключатели IGBT, при этом частота PWM регулируется в зависимости от температур соединения переключателей IGBT;
- момент перехода от трехфазного управления к двухфазному управлению; и/или
- применение случайной составляющей к частоте PWM для сокращения шума.
Устройство 120 управления содержит дополнительно блок 206 вычисления среднего выпрямленного напряжения, адаптированный для вычисления среднего значения выпрямленного напряжения VBUS на основании средних напряжений двигателя. Два варианта осуществления вычисления среднего выпрямленного напряжения приводятся далее, в качестве примера.
Первый вариант осуществления:
В соответствии с первым вариантом осуществления, опорные напряжения V123REF двигателя прикладываются без коррекций, связанных со средними измеренными напряжениями V123MEAS. Таким образом, корректирующие напряжения V123CORRECTION не учитываются. В соответствии с этим первым вариантом осуществления, среднее выпрямленное напряжение VBUS вычисляется дополнительно на основании опорных напряжений двигателя и опорного выпрямленного напряжения, что видно из нижеприведенных подробных расчетов.
Соотношения баланса между различными напряжениями системы в соответствии с первым вариантом осуществления имеют вид:
V123CONTROL=V123REF (корректирующие напряжения V123CORRECTION не применены);
V123CORRECTION=V123REF-V123MEAS (такой расчет опционален, поскольку корректирующие напряжения V123CORRECTION не используются);
V123COMMAND=V123CONTROL+(V123COMPENSATION+VSTRATEGY);
V123COMPENSATION - это вектор компенсации, содержащий три составляющих V1COMPENSATION, V2COMPENSATION и V3COMPENSATION; такой вектор позволяет компенсировать внутренние падения на силовых компонентах, обозначаемые далее как VDROP. Такие падения напряжения возникают в переключателях IGBT, в диодах, а также вследствие простоев, вводимых для избегания коротких замыканий в инверторе. Альтернативно, значениями компенсации, являющимися малыми величинами, можно пренебречь при среднем и большом напряжении (при средней и большой скорости).
V123COMMAND/VBUSDRIVE=m123;
m123*VBUS-V123DROP=V123REALIZED;
(VBUS - определяемое среднее выпрямленное напряжение, и V123DROP - вектор трех составляющих V1DROP, V2DROP и V3DROP, представляющих падение напряжения в силовом каскаде для каждой из трех фаз);
V123MEAS=V123REALIZED-VNO;
VNO - значение напряжения, соответствующее нейтральной точке измерительного блока. Такое значение может быть известным заранее, например, калибровкой.
На основании предшествующих соотношений баланса, получаются следующие соотношения:
V123CORRECTION=V123REF-V123MEAS;
V123COMMAND=V123REF+(V123COMPENSATION+VSTRATEGY);
m123=V123REF/VBUSDRIVE+(V123COMPENSATION+VSTRATEGY)/VBUSDRIVE;
V123REALIZED=V123REF*gV+(V123COMPENSATION+VSTRATEGY)*gV-V123DROP;
V123MEAS=V123REF*gV+(V123COMPENSATION+VSTRATEGY)*gV-V123DROP-VNO;
(gV - отношение VBUS/VBUSDRIVE, определяемое из способа в соответствии с изобретением).
Введением величины oV=(V123COMPENSATION+VSTRATEGY)*gV-V123DROP-VNO, вышеупомянутые соотношения упрощаются и принимают вид:
V123MEAS=V123REF*gV+oV;
V123CONTROL=V123REF (функционирование блока 202 в соответствии с первым вариантом осуществления);
V123CORRECTION=(1-gV)*V123REF-oV.
Величина oV может быть рассмотрена как смещение, или "offset", отображающее погрешности силового каскада. Если погрешности скомпенсированы, то величина oV, приближается к 0.
В этом случае, gV=V123MEAS/V123REF, и значение VBUS может быть определено, таким образом.
Отношение, представленное выше и позволяющее достигнуть gV, соответствует отношению амплитуды вектора V123MEAS к амплитуде вектора V123REF.
Например, можно рассмотреть преобразования типа Clarke, позволяющее преобразовать трехфазный вектор в двухфазный вектор (часто обозначаемые как (альфа, бета)).
Можно, таким образом, преобразовать трехфазный вектор со следующими составляющими:
V1=Vcos(wt-phi)+VN;
V2=Vcos(wt-phi-2pi/3)+VN;
V3=Vcos(wt-phi-4pi/3)+VN.
В двухфазную систему:
Valpha=Vcos(wt-phi);
Vbeta=Vsin(wt-phi).
Из этой двухфазной системы могут быть выведены полярные координаты:
V_amplitude=V (что соответствует амплитуде, которая относится к отношению gV);
V_phase=wt-phi.
Второй вариант осуществления:
В соответствии со вторым вариантом осуществления, блок 202 регулирует измеренные напряжения двигателя V123MEAS до опорных напряжений двигателя V123REF, вычисляя корректирующие напряжения двигателя V123CORRECTION, при этом блок 203 прикладывает корректирующие напряжения двигателя V123CORRECTION в течение определения управляющих напряжений V123CONTROL.
В соответствии со вторым вариантом осуществления, среднее выпрямленное напряжение VBUS вычисляется как и для первого варианта (таким образом, на основании измеренных напряжений двигателя V123MEAS и опорных напряжений двигателя V123REF), или заменяя средние напряжения двигателя V123MEAS или опорные напряжения двигателя V123REF корректирующими напряжениями двигателя V123CORRECTION или командными напряжениями V123COMMAND, как это детализировано в нижеприведенных вычислениях.
Соотношения баланса записываются в виде:
V123REF=V123MEAS;
V123CONTROL=V123REF+V123CORRECTION;
V123COMMAND=V123CONTROL+V123COMPENSATION+VSTRATEGY;
V123COMMAND/VBUSDRIVE=m123;
m123*VBUS-V123DROP=V123REALIZED;
V123MEAS=V123REALIZED-VNO.
Или:
V123MEAS=V123REF;
V123CONTROL=V123REF+V123CORRECTION;
V123COMMAND=V123REF+V123CORRECTION+V123COMPENSATION+VSTRATEGY;
m123=V123REF/VBUSDRIVE+(V123CORRECTION+V123COMPENSATION+VSTRATEGY)/VBUSDRIVE;
V123REALIZED=V123REF*gV+(V123CORRECTION+V123COMPENSATION+VSTRATEGY)*gV-V123DROP-VNO
Определяя oV таким же образом, что и для первого варианта осуществления, соотношения упрощаются:
V123CORRECTION=(V123REF*(1-gV)-oV)/gV;
V123MEAS=V123REF;
V123CONTROL=V123REF/GV-oV/gV.
В случае если смещение oV нулевое, то есть, погрешности силового каскада вполне скомпенсированы, получаем:
gV=V123MEAS/V123CONTROL, и значение VBUS может быть определено таким образом.
Как только среднее выпрямленное напряжение VBUS определено, в соответствии с одним из вариантов осуществления изобретения, среднее выпрямленное напряжение VBUS может быть использовано блоком 204 взамен опорного выпрямленного напряжения VBUSDRIVE на последующий период. Например, напряжение VBUS может заменить опорное выпрямленное напряжение VBUSDRIVE в памяти блока 204.
В зависимости от среднего значения выпрямленного напряжения VBUS можно управлять крутящим моментом для управления торможением. Например, опорными напряжениями двигателя V123REF может управлять блок 207. Например, если среднее выпрямленное напряжение VBUS ниже первого порогового значения th1, торможение двигателя может быть увеличено. Если среднее выпрямленное напряжение заключено между первым пороговым значением th1 и вторым пороговым значением th2, при этом второе пороговое значение th2 является приемлемым ограниченным напряжением для емкостей элементов 101 питания, торможение может быть прогрессивно снижено для того, чтобы повторно не вводить энергию, которая не может более сохраняться или рассеиваться. Если среднее выпрямленное напряжение превышает th2, то регулятор 102 скорости перестает управлять двигателем для защиты регулятора 102 скорости.
Значения th1 и th2 могут быть заданными. Как вариант, или дополнительно, сравнение среднего значения выпрямленного напряжения VBUS может быть сопоставлено с пороговыми значениями th1 и th2 для управления частотой питания электрического устройства.
Фиг.3 иллюстрирует структуру блоков управляющего устройства в соответствии со способом осуществления изобретения.
Каждый из блоков, представленных выше в связи с Фиг.2, может содержать структуру, показанную на Фиг.3. Альтернативно, каждый из этих блоков, или некоторые из них, могут быть в виде электронной схемы, предназначенной для реализации присущей ей функции. Такая специальная электронная схема может быть микроконтроллером или монолитной ASIC, выполненной с возможностью осуществления присущей ей функции.
Блок содержит процессор 300, пригодный для двунаправленной коммуникации, через шины, с памятью 301, такой как оперативная память RAM, постоянная память ROM, флэш-память, жесткий диск и/или любого типа среда хранения. Процессор 300 пригоден для выполнения инструкций для реализации присущей ему функции. Блок содержит дополнительно входной интерфейс 302 и выходной интерфейс 303 для сообщения с другими единицами управляющего устройства, для приема измерений напряжения, для передачи/приема команд.
Блок может содержать дополнительно базу данных для хранения данных, используемых для осуществления функции, присущей блоку.
В соответствии с вариантом, процессор 300 может осуществить функции всех блоков 201-207, описанных выше в связи с Фиг.2.
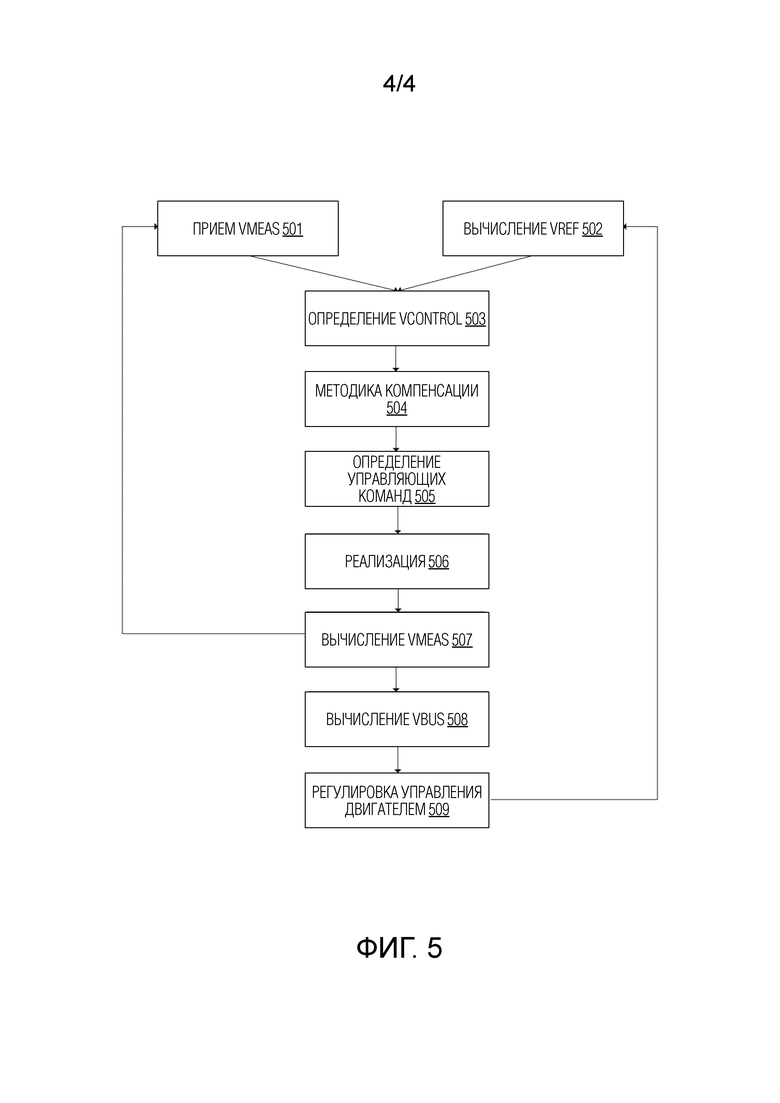
Фиг.5 - это диаграмма, иллюстрирующая этапы способа в соответствии с некоторыми вариантами осуществления изобретения.
Этапы 501-509 осуществляются в течение текущего периода, следующего за предыдущим периодом.
На этапе 501, блок 201 принимает измерения среднего напряжения двигателя, осуществленные на предыдущем период, как детализируется в связи с Фиг.2.
Параллельно, на этапе 502, блок 201 может вычислить опорные напряжения двигателя V123REF, как детализируется в связи с Фиг.2.
На этапе 503, блок 202 определяет напряжения контроля V123CONTROL, в соответствии с первым вариантом осуществления (копируя опорное напряжение двигателя V123REF) или в соответствии со вторым вариантом осуществления изобретения (учитывая корректирующие напряжения V123CORRECTION).
На этапе 504, блок 203 может использовать напряжения VSTRATEGY и V123COMPENSATION для определения командного напряжения V123COMMAND на основании управляющих напряжений V123CONTROL, при этом такой этап опционален, командные напряжения V123COMMAND могут быть выведены непосредственно из управляющих напряжений V123CONTROL.
На этапе 505, блок 203 определяет управляющие команды силового каскада T123, как детализируется выше.
Управляющие команды T123 передаются затем на три ветви силового каскада для реализации напряжений двигателя V123REALIZED на этапе 506.
На этапе 507, при приеме измерений напряжений двигателя, средние напряжения V123MEAS двигателя определяются блоком 205, как подробно рассмотрено выше. Определенные средние напряжения V123MEAS двигателя могут быть использованы в течение этапа 501 последующего периода, вслед за текущей фазой.
На этапе 508, среднее выпрямленное напряжение VBUS может быть определено блоком 206, как подробно рассмотрено выше. Среднее выпрямленное напряжение VBUS может заменить опорное выпрямленное напряжение VBUSDRIVE в блоке 204.
На этапе 509, управление двигателем адаптируется в зависимости от среднего выпрямленного напряжения VBUS. Например, такое управление может содержать замену опорного выпрямленного напряжения VBUSDRIVE средним выпрямленным напряжением VBUS, и/или изменение частоты двигателя, или опорных напряжений V123REF двигателя блоком 207 (возвращение на этап 502 в последующий период), то есть, изменяя крутящий момент двигателя.
Хотя настоящее изобретение было описано выше в связи с конкретными вариантами осуществления, изобретение никак не ограничивается описанными формами. Изобретение ограничено только тем, что определено в пунктах формулы и другие варианты осуществления, отличные от описанных выше, могут входить в объем притязаний формулы.
Кроме того, хотя варианты осуществления были описаны выше как комбинация компонентов и/или функций, должно быть ясно, что альтернативные способы осуществления могут быть получены другими комбинациями компонентов и/или функций, не отступая от объема притязаний изобретения.
Изобретение относится к электротехнике, а именно к управлению электропитанием устройства, такого как двигатель. Технический результат заявленного изобретения заключается в ускорении торможения двигателя, без системы рассеяния энергии и с защитой емкостей элементов питания регулятора скорости. Технический результат достигается за счет способа регулировки торможения двигателя, питаемого регулятором скорости. Регулятор скорости содержит множество из по меньшей мере N элементов питания низкого напряжения, соединенных последовательно, причем N превышает или равно 1. Способ регулировки торможения двигателя содержит следующие операции в течение периода торможения двигателя: определение (507) по меньшей мере одного среднего напряжения двигателя за заданный период в зависимости от значений напряжений двигателя, измеренных на клеммах двигателя на заданный период; в зависимости от определенного среднего напряжения двигателя, определение (508) среднего значения выпрямленного напряжения, в котором выпрямленное напряжение соответствует напряжению, полученному на выходе из выпрямителя каждого элемента питания; регулировка (509) торможения электрического устройства в зависимости от среднего значения выпрямленного напряжения. 3 н. и 6 з.п. ф-ы, 5 ил.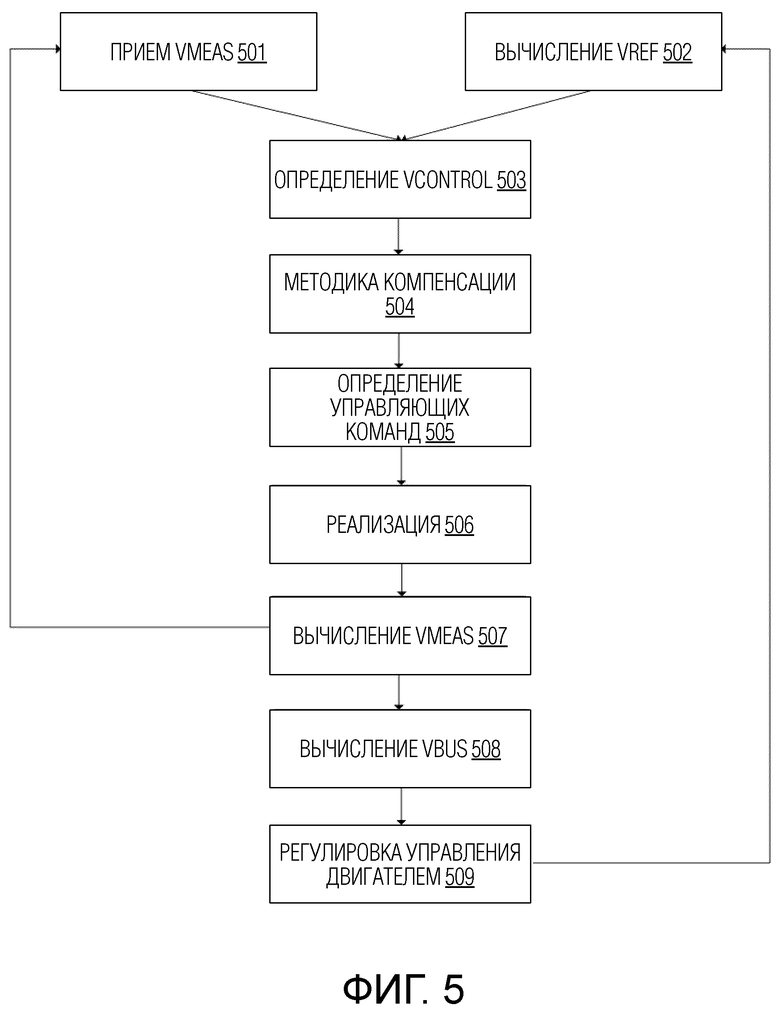
1. Способ регулировки торможения двигателя (100), питаемого регулятором (102) скорости, причем регулятор скорости содержит множество из по меньшей мере N элементов питания (101) низкого напряжения, соединенных последовательно, причем N превышает или равно 1, причем способ содержит следующие операции в течение периода торможения двигателя:
- определение (507) по меньшей мере одного среднего напряжения двигателя за заданный период в зависимости от значений напряжений двигателя, измеренных на клеммах двигателя за заданный период;
- в зависимости от упомянутого определенного среднего напряжения двигателя, определение (508) среднего значения выпрямленного напряжения, причем выпрямленное напряжение соответствует напряжению, полученному на выходе выпрямителя каждого элемента питания;
- регулировку (509) торможения электрического устройства в зависимости от среднего значения выпрямленного напряжения,
причем регулировка (509) торможения содержит сравнение среднего выпрямленного напряжения по меньшей мере с одним заданным пороговым значением, и изменение крутящего момента, приложенного к двигателю, в зависимости от результата сравнения, и
пороговое значение задается в зависимости от максимального напряжения емкостей элементов питания регулятора (102) скорости.
2. Способ по п.1, в котором определение (508) среднего значения выпрямленного напряжения является функцией среднего напряжения двигателя, опорного напряжения двигателя и опорного выпрямленного напряжения, причем опорное напряжение двигателя получают из команды, принимаемой на входе регулятора (102) скорости и опорное выпрямленное напряжение является значением по умолчанию.
3. Способ по п.1, в котором способ содержит определение (502) по меньшей мере одного опорного напряжения двигателя, причем опорное напряжение двигателя связано со средним напряжением двигателя, измеренным посредством генерирования корректирующего напряжения двигателя, причем управляющее напряжение двигателя получается на основании опорного напряжения двигателя и корректирующего напряжения,
в котором среднее выпрямленное напряжение получено из среднего напряжения двигателя, управляющего напряжения двигателя и опорного выпрямленного напряжения, причем опорное выпрямленное напряжение является значением по умолчанию.
4. Способ по одному из предыдущих пунктов, в котором регулировка торможения содержит замену, на последующий период, опорного выпрямленного напряжения средним выпрямленным напряжением для определения управляющих команд для элементов питания (101) регулятора (102) скорости,
причем опорное выпрямленное напряжение является значением по умолчанию.
5. Способ по одному из предыдущих пунктов, в котором заданный период равен периоду дискретизации опорного напряжения двигателя на входе регулятора (102) скорости.
6. Способ по одному из предыдущих пунктов, в котором регулятор скорости содержит 3*N элементов питания, с тремя фазами, каждая из которых содержит N элементов питания, соединенных последовательно, причем соответствующие выходы каждой фазы соединены звездой или треугольником с электродвигателем.
7. Способ по п.6, в которой управляющие команды элементов питания определяются на основании опорного напряжения двигателя и на основании добавочного напряжения методики, общей для трех фаз, причем добавочное напряжение методики определено так, чтобы минимизировать число коммутаций переключателей элементов питания.
8. Компьютерно-читаемый носитель данных, содержащий компьютерную программу, исполняемую процессором (300) и содержащую инструкции для осуществления этапов способа в соответствии с одним из пп.1-7, когда она выполняется процессором.
9. Устройство управления для регулировки торможения двигателя (100), питаемого регулятором (102) скорости, причем регулятор скорости содержит N элементов питания (101) низкого напряжения, соединенных последовательно, причем N превышает или равно 2, отличающееся тем, что устройство управления содержит:
- блок (205), выполненный с возможностью, в течение периода торможения двигателя, определять по меньшей мере одно среднее напряжение двигателя за заданный период в зависимости от значений напряжений двигателя, измеренных на клеммах двигателя за заданный период;
- блок (206), выполненный с возможностью определять, в зависимости от упомянутого определенного среднего напряжения двигателя, среднее значение выпрямленного напряжения, причем выпрямленное напряжение соответствует напряжению, полученному на выходе из выпрямителя каждого элемента питания;
- блок (204; 207), выполненный с возможностью регулировать торможение электрического устройства в зависимости от среднего значения выпрямленного напряжения,
причем регулировка торможения содержит сравнение среднего выпрямленного напряжения по меньшей мере с одним заданным пороговым значением, и изменение крутящего момента, приложенного к двигателю, в зависимости от результата сравнения, и
пороговое значение задается в зависимости от максимального напряжения емкостей элементов питания регулятора (102) скорости.
| US 10008937 B1, 26.06.2018 | |||
| US 2002085398 A1, 04.07.2002 | |||
| Устройство постоянной блокировки дифференциала колесного трактора | 1960 |
|
SU144730A1 |
| РЕКУПЕРИРУЮЩИЙ ЭЛЕКТРОПРИВОД С ИНВЕРТОРОМ НАПРЯЖЕНИЯ | 2003 |
|
RU2262794C2 |
| US 2017244325 A1, 24.08.2017. | |||
