Изобретение относится к электротехнике, а именно к системам электроснабжения (СЭС) геостационарных космических аппаратов (КА), с использованием в качестве первичных источников энергии солнечных батарей (СБ), а в качестве накопителей энергии - аккумуляторных батарей (АБ).
При эксплуатации аккумуляторных батарей в составе геостационарных КА основная работа приходится на период теневых орбит (2 раза в год по 45 суток, максимальная длительность «тени» - 70 минут). В остальное время аккумуляторная батарея, в основном, работает в режиме хранения с периодическими дозарядами для компенсации саморазряда.
Отличительной особенностью эксплуатации в таких условиях является сочетание интенсивных заряд-разрядных циклов в течение 45 суток (период «теневых» орбит) с последующим длительным, 4,5 месяца, хранением в заряженном состоянии на «солнечных» орбитах.
При этом, если в период «солнечных» орбит емкость аккумуляторных батарей практически не используется, то в период «теневых» орбит, особенно при максимальной длительности «тени», от аккумуляторной батареи, как правило, требуется максимальная емкость.
Известен способ управления автономной системой электроснабжения (патент РФ №2059988, H02J 7/35), содержащей солнечную батарею (СБ), стабилизатор напряжения, включенный между солнечной батареей и нагрузкой, «n» аккумуляторных батарей (n≥1) и по «n» (по числу АБ) зарядных и разрядных устройств, а также для каждой АБ - устройства контроля степени заряженности.
В известной СЭС осуществляется непрерывное управление стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от входного (напряжение СБ) и выходного напряжений СЭС. При этом зарядные устройства обеспечивают заряд АБ, а стабилизатор напряжения и разрядное устройство обеспечивают питание потребителей.
Цепи непрерывного управления (обратной связи) зарядного устройства подключены к шине СБ и шине нагрузки, а цепи непрерывного управления стабилизатора напряжения и разрядного устройства подключены к шине нагрузки.
В зависимости от степени заряженности или разряженности АБ производится запрет или разрешение работы зарядного устройства и разрядного устройства.
Такое управление обеспечивает длительную автономную работу СЭС. Однако оно не обеспечивает повышение эффективности использования аккумуляторных батарей в определенные промежутки времени.
Известен способ управления автономной системой электроснабжения (патент РФ №2168828, H01J 7/36), содержащей солнечную батарею и «n» аккумуляторных батарей, где n≥1, стабилизатор напряжения, включенный между солнечной батарей и нагрузкой, и по «n» зарядных и разрядных устройств, заключающийся в управлении стабилизатором напряжения и зарядно-разрядными устройствами в зависимости от входного и выходного напряжения системы, контроле степени заряженности и разряженности аккумуляторных батарей, запрете на работу соответствующего зарядного устройства при достижении предельного уровня заряженности данной аккумуляторной батареи, снятии этого запрета при достижении определенного уровня разряженности данной аккумуляторной батареи, запрете на работу соответствующего разрядного устройства при достижении предельного уровня разряженности данной аккумуляторной батареи, снятии этого запрета при достижении определенного уровня заряженности данной аккумуляторной батареи. Этот способ принят за прототип заявляемому изобретению.
Известный способ решает задачу управления работой аккумуляторной батареи с использованием определенного алгоритма (в данном изобретении - обеспечивающего живучесть системы электроснабжения), однако он не решает вопроса повышения эффективности использования аккумуляторной батареи при прохождении КА «теневых» участков орбиты.
Задачей заявляемого изобретения является повышение эффективности использования аккумуляторных батарей при прохождении геостационарного КА «теневых» участков орбиты.
Поставленная задача решается тем, что при проведении управления автономной системой электроснабжения геостационарного космического аппарата, содержащей солнечную батарею и «n» аккумуляторных батарей, стабилизатор напряжения, включенный между солнечной батареей и нагрузкой, и «n» зарядных и разрядных устройств, заключающийся в контроле степени заряженности (разряженности) аккумуляторных батарей, управлении зарядными и разрядными устройствами в зависимости от входного и выходного напряжения системы электроснабжения и уровня заряженности аккумуляторных батарей, запрете на работу соответствующего зарядного устройства при достижении предельного уровня заряженности данной аккумуляторной батареи, снятии этого запрета при снижении уровня заряженности до определенного значения, запрете на работу соответствующего разрядного устройства при достижении минимального уровня заряженности данной аккумуляторной батареи, снятии этого запрета при достижении определенного уровня заряженности данной аккумуляторной батареи, при этом в составе космического аппарата установлена бортовая ЭВМ для контроля состояния и управления работой космического аппарата и командно-измерительная радиолиния, при снижении уровня заряженности до заранее определенного значения рассчитывают необходимое время для восстановления полной заряженности аккумуляторной батареи и соотносят его с периодом времени до очередного разряда аккумуляторной батареи, а снятие запрета на работу зарядного устройства проводят с учетом дополнительного условия: окончание заряда должно быть приближено к началу последующего разряда. Кроме того, заряд проводят в два этапа: заряд до определенного уровня ниже полного заряда и полный заряд с окончанием, приближенным к началу последующего разряда или включение заряда, проводят дважды: непосредственно после предшествующего разряда и за 2-3 часа до начала последующего разряда.
Действительно, при работе аккумуляторной батареи в составе геостационарного КА начало «теневого» участка, его длительность и время между «теневыми» участками орбиты строго определены, поэтому с использованием бортовой ЭВМ управление зарядом в период между тенями можно проводить по любому алгоритму исходя из технической целесообразности. При этом эффективное использование аккумуляторных батарей обеспечивается гибкостью контура управления зарядом. Время, необходимое для восполнения заряда аккумуляторной батареи, рассчитывается исходя из состояния ее определяющего параметра: для никель-водородной аккумуляторной батареи - это текущее давление в аккумуляторах (по отношению к давлению окончания заряда), а для литий-ионной аккумуляторной батареи - это текущее напряжение аккумуляторов (по отношению к напряжению окончания заряда). В обоих случаях зависимость емкости от определяющего параметра практически линейна.
В заявляемом изобретении предлагается снятие запрета на работу зарядного устройства проводить с учетом дополнительного условия: окончание заряда должно быть приближено к началу последующего разряда («теневого» участка орбиты). При этом заряд рекомендуется проводить в 2 этапа: заряд до определенного уровня заряженности (ниже полного заряда) и полный заряд с окончанием, приближенным к началу последующего разряда. Это позволит получить от аккумуляторной батареи на предстоящем «теневом» участке орбиты максимальную разрядную емкость за счет устранения влияния саморазряда аккумуляторов и вывода аккумуляторной батареи на более высокую температуру в сравнении с режимом ее хранения в заряженном состоянии.
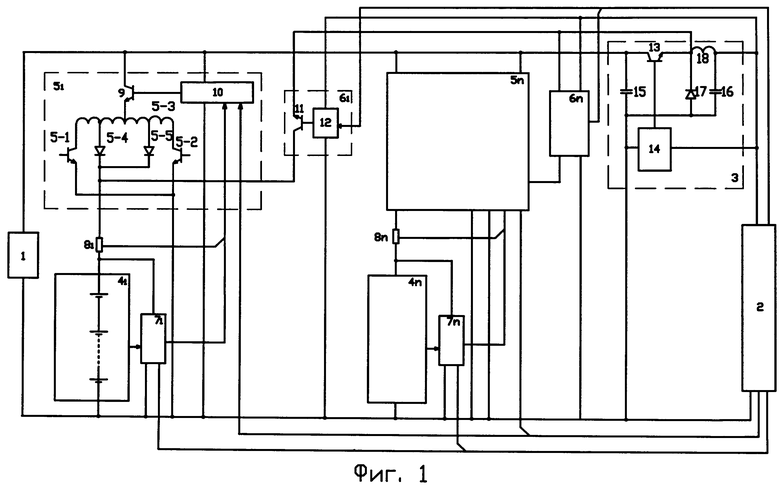
На чертеже приведена функциональная схема автономной системы электроснабжения КА для реализации заявляемого способа.
Автономная система электроснабжения КА содержит солнечную батарею 1, подключенную к нагрузке 2 через стабилизатор напряжения 3, аккумуляторные батареи 41-4n, подключенные через зарядные устройства 51-5n к солнечной батарее 1, а через разрядные устройства 61-6n - к входу выходного фильтра стабилизатора напряжения 3.
При этом нагрузка 2 в своем составе содержит бортовую ЭВМ, систему телеметрии и командно-измерительную радиолинию.
Параллельно аккумуляторным батареям 41-4n подключены устройства контроля аккумуляторных батарей 71-7n, связанные входом с аккумуляторными батареями 41-4n для контроля состояния аккумуляторов (напряжения, давления - для никель-водородных аккумуляторов, температуры), а выходом - с нагрузкой 2. Кроме того, устройства контроля аккумуляторных батарей 71-7n содержат в своем составе схемы переключения с программного на аппаратный контур контроля и управления (на схеме не показано).
В цепи заряда-разряда аккумуляторных батарей установлены измерительные шунты 81-8n.
Зарядные устройства 51-5n состоят из регулирующего ключа 9, управляемого схемой управления 10, вольтодобавочного узла, выполненного на трансформаторе 5-3, транзисторах 5-1 и 5-2, и выпрямителя на диодах 5-4 и 5-5.
Разрядные устройства 61-6n состоят из регулирующего ключа 11, управляемого схемой управления 12.
Стабилизатор напряжения 3 состоит из регулирующего ключа 13, управляемого схемой управления 14, входного фильтра - конденсатор 15 и выходного фильтра на диоде 17, дросселе 18 и конденсаторе 16.
Схемы управления: 10 - зарядных устройств 51-5n, 12 - разрядных устройств 61-6n, 14 - стабилизатора напряжения 3, выполнены в виде широтно-импульсных модуляторов, входом подключенных к шинам стабилизируемого напряжения. Схемы управления 10 зарядных устройств 51-5n дополнительно связаны с измерительными шунтами 81-8n, устройствами контроля аккумуляторных батарей 71-7n и нагрузкой 2.
Устройство работает следующим образом. В процессе эксплуатации аккумуляторные батареи 41-4n работают в основном в режиме хранения в заряженном состоянии и периодических дозарядов от солнечной батареи 1 через зарядные устройства 51-5n. Такой режим работы позволяет содержать их в постоянной готовности на случай аварийных ситуаций (потеря ориентации ИСЗ на Солнце) или на прохождение штатных теневых участков орбиты.
Питание нагрузки 2 осуществляется при этом от солнечной батареи 1 через стабилизатор напряжения 3.
При прохождении теневых участков орбиты либо при нарушении ориентации нагрузка 2 питается от аккумуляторных батарей 41-4n через разрядные устройства 61-6n.
Устройства контроля аккумуляторных батарей 71-7n контролируют текущее состояние аккумуляторов (напряжение, давление - для никель-водородных аккумуляторов, температуру) аккумуляторных батарей 41-4n и передают информацию в нагрузку 2 (бортовую ЭВМ) для управления зарядом аккумуляторных батарей по программному контуру.
При этом (в бортовой ЭВМ по заранее заложенному алгоритму) при снижении уровня заряженности аккумуляторной батареи до определенного значения рассчитывают необходимое время для восстановления полной заряженности аккумуляторной батареи и соотносят его с периодом времени до очередного разряда аккумуляторной батареи, а снятие запрета на работу зарядного устройства проводят с учетом дополнительного условия: окончание заряда должно быть приближено к началу последующего разряда. Кроме того, заряд проводят в 2 этапа: заряд до определенного уровня ниже полного заряда и полный заряд с окончанием, приближенным к началу последующего разряда. Для упрощения процесса включение заряда проводят дважды: непосредственно после предшествующего разряда и за 2-3 часа до начала последующего разряда.
В процессе эксплуатации КА алгоритм управления зарядными устройствами может быть изменен с Земли через командно-измерительную радиолинию.
Таким образом, заявляемый способ управления автономной системой электроснабжения космического аппарата обеспечивает повышение эффективности использования аккумуляторных батарей при прохождении геостационарного КА «теневых» участков орбиты.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2535301C2 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2577632C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2541512C2 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2010 |
|
RU2470440C2 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2634473C9 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2574922C2 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2012 |
|
RU2521538C2 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2015 |
|
RU2604206C1 |
| Способ управления автономной системой электроснабжения космического аппарата | 2018 |
|
RU2706762C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2576795C2 |
Изобретение относится к электротехнике, а именно к системам электроснабжения (СЭС) геостационарных космических аппаратов (КА), с использованием в качестве первичных источников энергии солнечных батарей (СБ), а в качестве накопителей энергии - аккумуляторных батарей (АБ). Техническим результатом заявляемого изобретения является повышение эффективности использования аккумуляторных батарей при прохождении геостационарного КА «теневых» участков орбиты. Предлагается Способ управления автономной системой электроснабжения геостационарного космического аппарата, содержащей солнечную батарею и «n» аккумуляторных батарей, стабилизатор напряжения, включенный между солнечной батареей и нагрузкой, и «n» зарядных и разрядных устройств, заключающийся в контроле степени заряженности (разряженности) аккумуляторных батарей, управлении зарядными и разрядными устройствами в зависимости от входного и выходного напряжения системы электроснабжения и уровня заряженности аккумуляторных батарей, запрете на работу соответствующего зарядного устройства при достижении предельного уровня заряженности данной аккумуляторной батареи, снятии этого запрета при снижении уровня заряженности до определенного значения, запрете на работу соответствующего разрядного устройства при достижении минимального уровня заряженности данной аккумуляторной батареи, снятии этого запрета при достижении определенного уровня заряженности данной аккумуляторной батареи, при этом в составе космического аппарата установлена бортовая ЭВМ для контроля состояния и управления работой космического аппарата и командно-измерительная радиолиния. 1 з.п. ф-лы, 1 ил.
1. Способ управления автономной системой электроснабжения геостационарного космического аппарата, содержащей солнечную батарею и «n» аккумуляторных батарей, стабилизатор напряжения, включенный между солнечной батареей и нагрузкой, и «n» зарядных и разрядных устройств, заключающийся в контроле степени заряженности (разряженности) аккумуляторных батарей, управлении зарядными и разрядными устройствами в зависимости от входного и выходного напряжения системы электроснабжения и уровня заряженности аккумуляторных батарей, запрете на работу соответствующего зарядного устройства при достижении предельного уровня заряженности данной аккумуляторной батареи, снятии этого запрета при снижении уровня заряженности до заранее установленного значения, запрете на работу соответствующего разрядного устройства при достижении минимального уровня заряженности данной аккумуляторной батареи, снятии этого запрета при достижении определенного уровня заряженности данной аккумуляторной батареи, при этом в составе космического аппарата установлена бортовая ЭВМ для контроля состояния и управления работой космического аппарата и командно-измерительная радиолиния, отличающийся тем, что при снижении уровня заряженности до определенного значения рассчитывают необходимое время для восстановления полной заряженности аккумуляторной батареи и соотносят его с периодом времени до очередного разряда аккумуляторной батареи, а снятие запрета на работу зарядного устройства и заряд аккумуляторных батарей проводят в два этапа: заряд до заранее установленного уровня ниже полного заряда и полный заряд окончанием, приближенным к началу последующего разряда.
2. Способ управления автономной системой электроснабжения космического аппарата по п.1, отличающийся тем, что включение заряда проводят дважды: непосредственно после предшествующего разряда и за 2-3 часа до начала последующего разряда.
| RU 2059988 C1, 10.05.1996 | |||
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2010 |
|
RU2470440C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПОТРЕБЛЕНИЕМ ОРБИТАЛЬНОЙ ГРУППИРОВКИ КОСМИЧЕСКИХ АППАРАТОВ С ЭЛЕКТРОРЕАКТИВНЫМИ ДВИГАТЕЛЯМИ | 2005 |
|
RU2304070C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭНЕРГООБЕСПЕЧЕНИЕМ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2411163C1 |
| АВТОНОМНАЯ СИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ | 2001 |
|
RU2229191C2 |
| Устройство для кантования слитков | 1982 |
|
SU1133213A1 |
| US4707979 A, 24.11.1987 | |||

