Изобретение относится к космической технике, более конкретно к устройству для физических упражнений, в частности ходьбы и бега, с созданием продольной осевой нагрузки на космонавта, предназначенного для использования в космическом аппарате (КА) в условиях невесомости.
Известен бортовой тренажер для тренировки и поддержания физической формы космонавтов [Елисеев А.С. «Техника космических полетов». М., Машиностроение, 1983 г., с.154], предназначенный для установки на космические аппараты (КА). В состав тренажера входят "бегущая" дорожка и система нагружения. "Бегущая" дорожка представляет собой транспортер, который приводится в движение электроприводом. Замкнутая в кольцо лента транспортера надета на два шкива, установленных на металлическом основании. Ведущий шкив соединен с электроприводом и закреплен на основании жестко, а ведомый - связан с основанием через натяжной механизм. Под рабочей частью ленты имеются опорные ролики. Основание через амортизаторы неподвижно крепится к элементам конструкции КА.
Недостатками данного прототипа является то, что при имитации бега и прыжков на основании тренажера и через него на конструкцию КА передаются толчки и удары, которые создают нагружения и колебания конструкции станции. Во время использования экипажем данного тренажера с бегущей дорожкой невозможно проведение экспериментов в условиях микрогравитации на станции, вследствие чего исключается реализация ряда режимов работы аппаратуры, затрудняются точные наблюдения. Со своей стороны, опасность колебаний конструкции станции накладывает свои ограничения на режимы бега и ходьбы (частота колебаний тренажера при упражнениях не должна совпадать с собственной частотой конструкции станции).
Задачей, на решение которой направлено изобретение, является создание надежного, долговечного и удобного в работе тренажера.
Техническим результатом заявленного изобретения является исключение передачи действия динамических сил, возникающих при работе тренажера, в виде толчков, ударов, колебаний и, как следствие, нагружений на конструкцию КА при тренировках космонавтов на тренажере с "бегущей" дорожкой на борту космического аппарата (КА), возможность работы тренажера как в ручном, так и в автоматическом режимах (по запрограммированным протоколам), возможность формирования файла с данными тренировки с последующей передачей на Землю, наличие тензоизмерительной системы (измерение и регистрация силы опорной реакции, усилия системы притяга и натяжения полотна), а также сокращение времени технического обслуживания заявленного тренажера.
Для решения поставленной задачи и достижения при этом технического результата тренажер с «бегущей» дорожкой для космического аппарата содержит панель управления и блок полотна, прикрепленный к системе виброизоляции и состоящий из узла опорного и узла притяга, имеющих возможность поворачиваться друг относительно друга на угол до 90°, при этом узел опорный включает в себя полотно, приводной двигатель, связанный через ремень с ведущим барабаном, ведомый барабан, узел роликов, механизм натяжения ремня, тензосистему и блок управления, а узел притяга содержит двигатель, амортизационный шнур, на концах которого закреплены заделки, взаимодействующий с системой роликов, механизмом натяжения и выводными устройствами, размещенными на несущей плите, и выполнен с возможностью прикрепления к нему тренировочно-нагрузочного костюма космонавта.
Принцип действия тренажера состоит в создании равномерного перемещения полотна (в активном и пассивном режимах), выполненного в виде бесконечной замкнутой ленты, с заданной скоростью для обеспечения ходьбы и бега космонавта в условиях невесомости с созданием продольной осевой нагрузки на тело космонавта с помощью системы притяга и тренировочно-нагрузочного костюма (ТНК-У-1). Управление работой тренажера осуществляется с панели управления тренажера (ПУ).
Система виброизоляции предусматривается для сведения к минимуму действия динамических сил, создаваемых при эксплуатации тренажера, на конструкцию КА, в то же время для обеспечения стабильной поверхности для бега и ходьбы.
Внешний вид тренажера представлен на фиг.1.
Блок полотна с системой управления 1, показанный на фиг.1, предназначен:
- для создания равномерного перемещения полотна в одном направлении в заданных режимах, с заданными скоростями и параметрами;
- для обеспечения продольной осевой нагрузки на космонавта по средствам системы притяга;
- для обеспечения управления режимами работы и индикации параметров тренажера с помощью ПУ;
- для хранения и записи параметров тренировки на съемный носитель информации.
В блок полотна с системой управления 1 входят: узел опорный 2, узел притяга 3, панель управления 4, кабель ПУ и два кабеля питания.
Блок полотна с системой управления 1 крепится к системе виброизоляции 5 с помощью 16 винтов М8.
Панель управления 4 может быть прикреплена к любому из поручней КА с использованием универсальных кронштейнов.
Система виброизоляции 5, показанная на фиг.1, предназначена для обеспечения условий микрогравитации на борту КА при работе (ходьбе и беге) на тренажере, она представляет собой пассивную систему, принцип действия которой основан на эффекте сухого трения «металлорезины».
Блок полотна с системой управления тренажером состоит из двух основных частей - панели управления 4 и блока полотна 1 (БП).
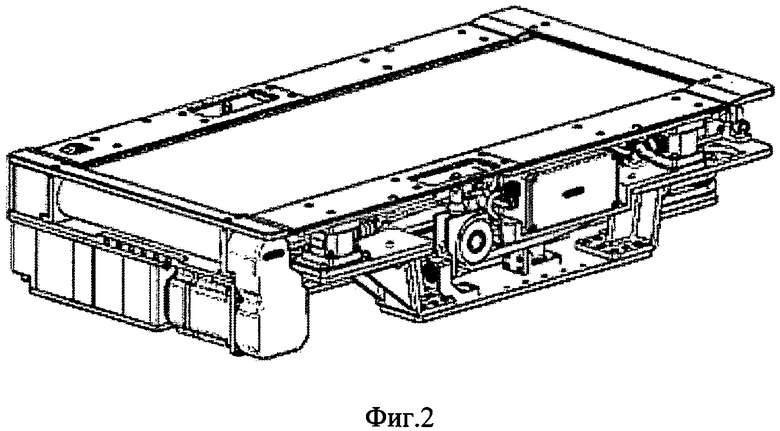
БП представляет собой электромеханическое изделие, которое обеспечивает равномерное перемещение полотна (в активном и пассивном режимах) с заданной скоростью с помощью электропривода, а также обеспечивает создание продольной осевой нагрузки на тело тренирующегося с помощью системы притяга.
Штатная эксплуатация БП осуществляется в рабочем положении. Внешний вид рабочего положения представлен на фиг.2.
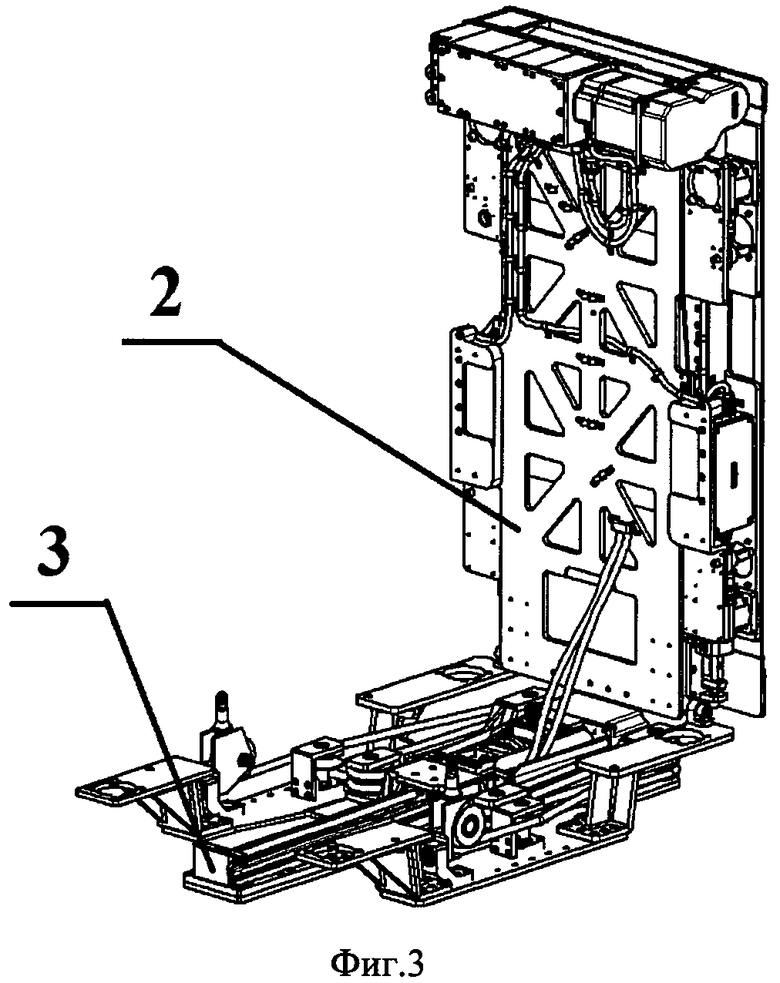
Конструкция БП состоит из двух основных узлов - узла опорного 2 и узла притяга 3, показанных на фиг.3. При штатной эксплуатации оба узла неподвижно соединены между собой четырьмя болтами. Для проведения обслуживания производится откручивание болтов. При этом опорный узел получает возможность поворачиваться относительно узла притяга на свободных (зазорных) петлях на угол до 90°, как показано на фиг.3. К системе электропитания КА БП подключается двумя кабелями питания.
Панель управления 4 (ПУ) является конструктивно самостоятельным узлом и содержит в себе промышленный защищенный планшетный компьютер «МТ-840» с сенсорным экраном, с помощью которого осуществляется управление работой тренажера и индикации параметров. Кроме этого, панель управления 4 обеспечивает хранение данных и функцию записи параметров физической тренировки на съемный носитель информации - USB-флеш-диск, поставляемый в укладке принадлежностей тренажера. Внешний вид панели управления 4 представлен на фиг.4.
Панель управления 4 крепится к конструкции КА с помощью специального кронштейна, показанного на фиг.1 (имеется на борту), и подключается к БП с помощью кабеля ПУ.
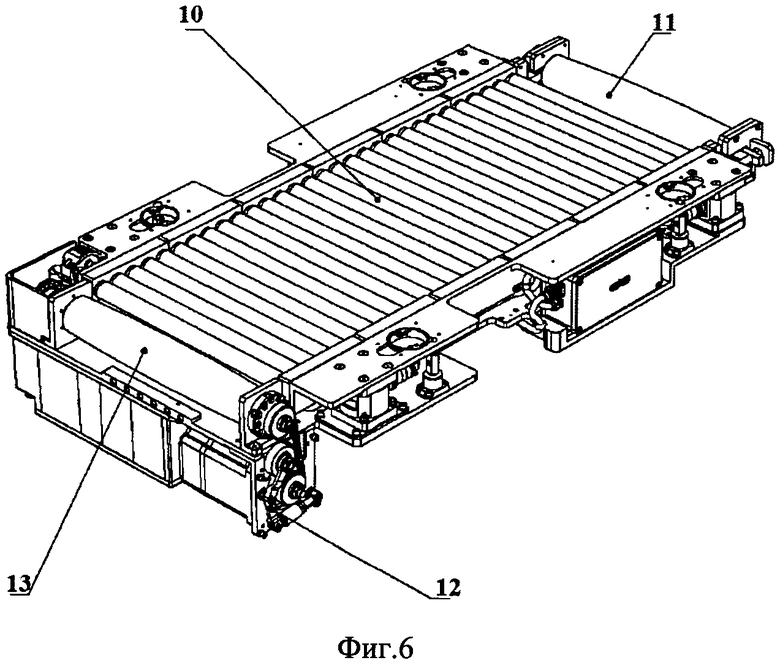
Узел опорный 2 предназначен для приведения в движение полотна в необходимом диапазоне скоростей. Натяжение полотна обеспечивается регулировкой барабана заднего.
При получении команды главным двигателем с блока управления, двигатель, посредством ременной передачи, обеспечивает вращение ведущего вала с необходимой скоростью, который приводит в движение полотно.
Узел опорный включает в себя:
- Полотно 6;
- Тензосистему 7;
- Главный (приводной) двигатель 8;
- Блок управления 9;
- Узел роликов 10;
- Барабан задний 11;
- Механизм натяжения ремня 12;
- Барабан ведущий 13.
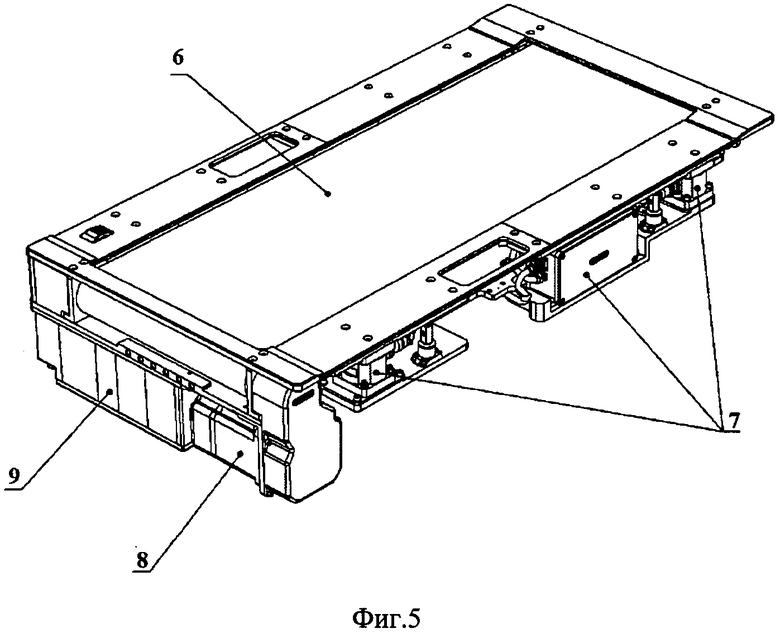
Устройство и внешний вид узла опорного представлен на фиг.5 и 6 (на фиг.6 полотно 6 условно снято).
Полотно 6 представляет собой ленту, выполненную из резины и предназначенную для передачи движения человеку с помощью непосредственного контакта.
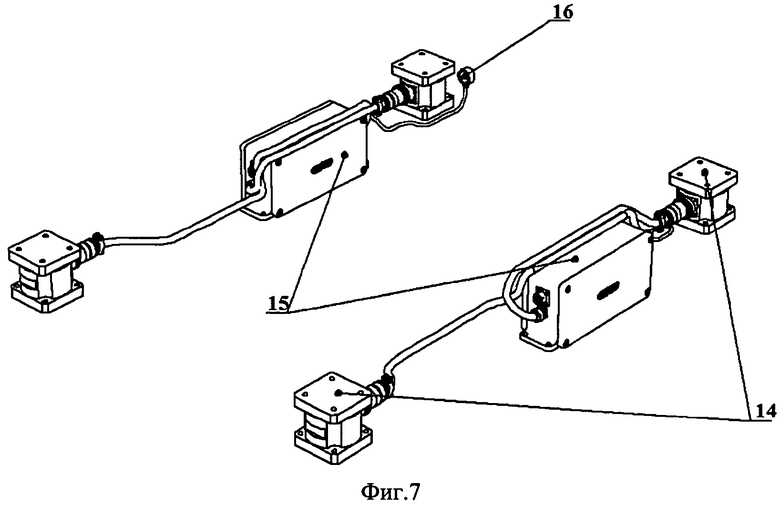
Тензосистема 7, представленная на фиг.7, предназначена для определения силы опорных реакций и измерения усилия системы притяга посредством четырех датчиков МС3А-6-1000, а также измерения усилия натяжения полотна посредством датчиков силы C9B.
Тензосистема включает в себя:
- Тензодатчик 14 МС3А-6-1000 (4 шт.);
- Блок тензоусилителей 15 (2 шт.);
- Датчик силы 16 C9B (2 шт.).
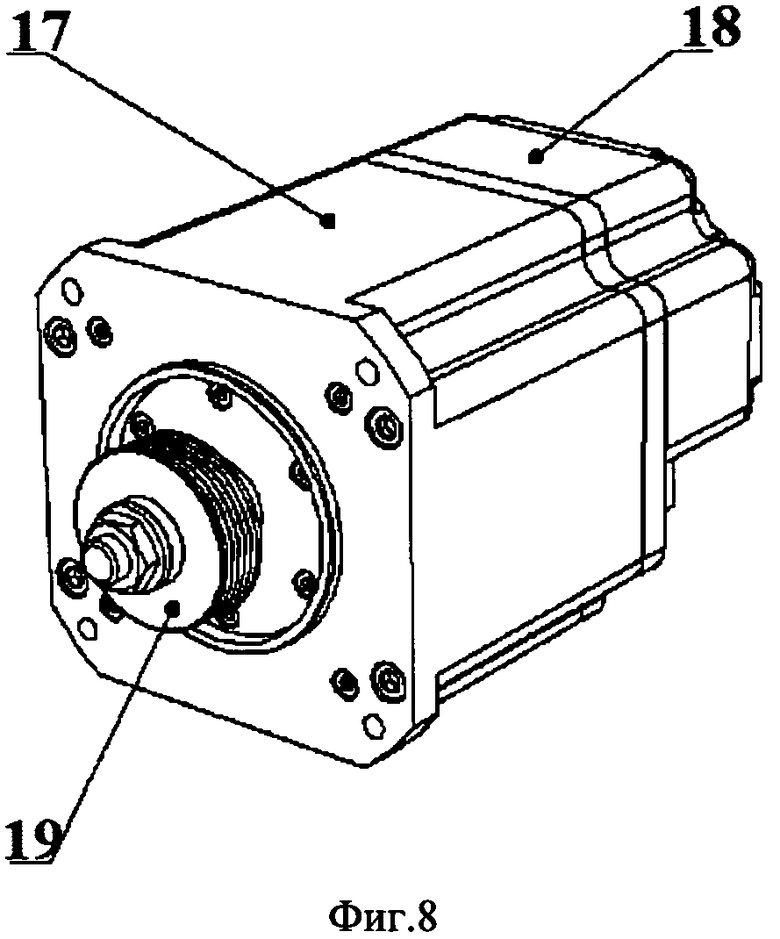
Главный (приводной) двигатель 8, показанный на фиг.8, содержит корпус (моторный отсек) 17, блок электроники 18 и выходной вал со шкивом 19.
Двигатель предназначен для передачи крутящего момента посредством ременной передачи на ведущий барабан.
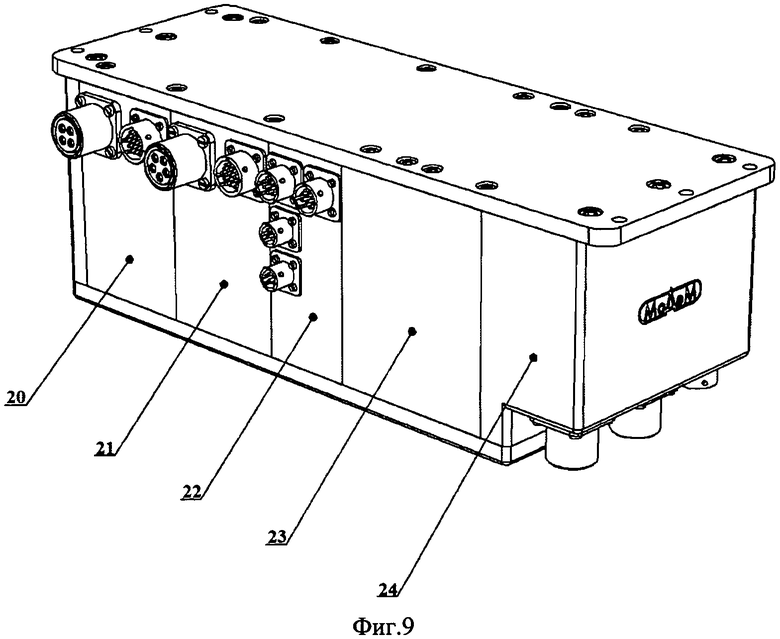
Блок управления 9, показанный на фиг.9, представляет собой блочно-модульную конструкцию, включающую в себя:
- Модуль управления главным двигателем 20;
- Модуль управления двигателем притяга 21;
- Модуль связного контроллера 22;
- Модуль источника питания 23;
- Модуль реле 24.
Блок управления обеспечивает сбор информации и управление системами тренажера и взаимодействие их с панелью управления.
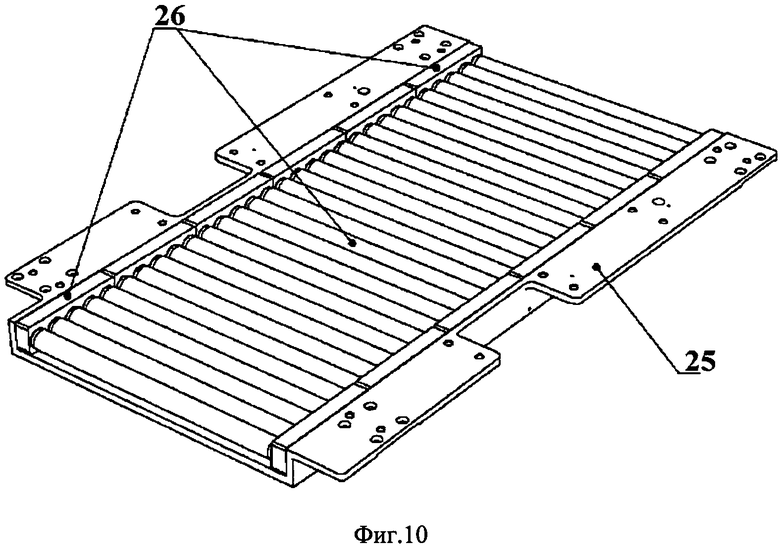
Узел роликов 10, представленный на фиг.10, представляет собой основание 25 с размещенными в нем блоками роликов 26 (6 шт. по 5 роликов в каждом) и служит опорой для полотна.
Узел роликов воспринимает усилия опорных реакций человека и передает их на чувствительную часть тензосистемы (тензодатчики МС3А-6-1000).
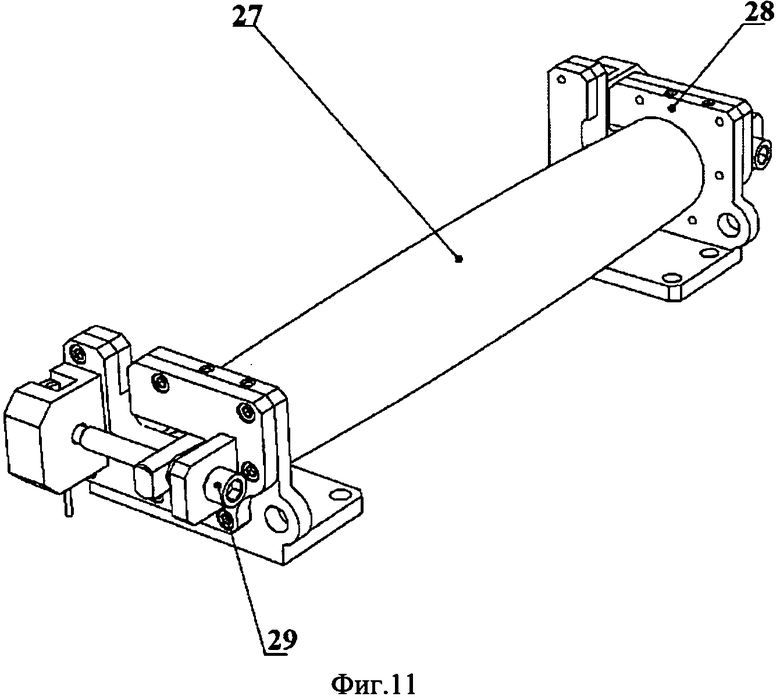
Барабан задний 11, представленный на фиг.11 и 12, представляет собой бочкообразный вал 27, закрепленный в двух опорах 28, и предназначен для поддержки и натяжения полотна. Бочкообразная форма вала обусловлена необходимостью центровки полотна. Регулировка натяжения полотна осуществляется вращением регулировочных винтов 29, которые перемещают вал и, соответственно, натягивают или ослабляют полотно 6. Вращение винтов 29 необходимо осуществлять согласованно, для исключения перекоса. Упор регулировочных винтов 29 осуществляется на датчики силы 30, таким образом обеспечивается измерение усилия натяжения.
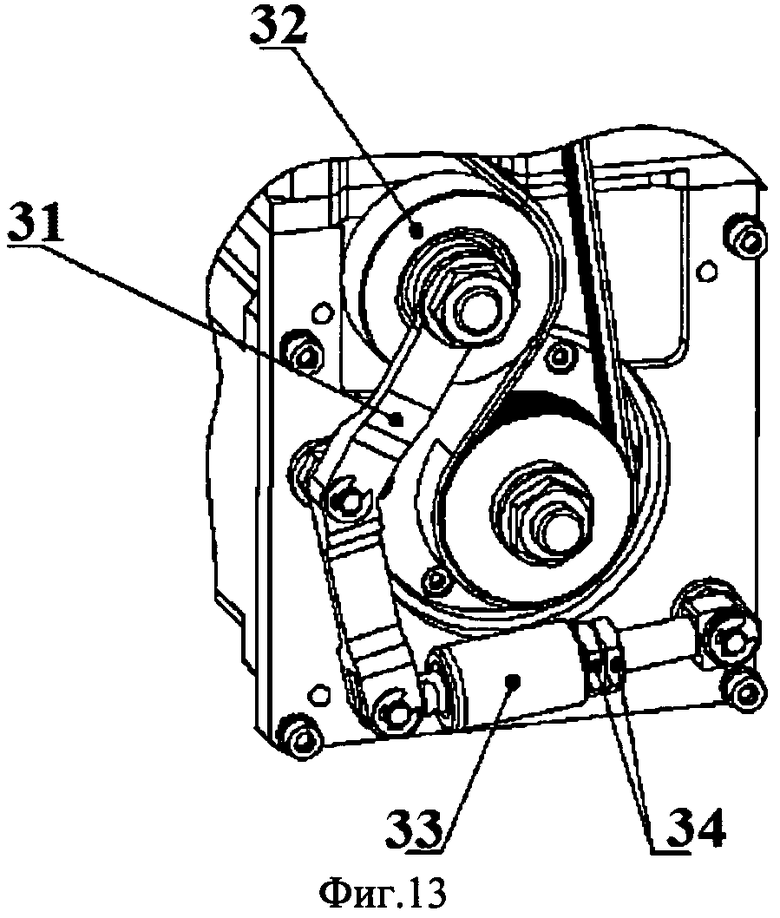
Механизм натяжения ремня 12, изображенный на фиг.13 и 14, включает в себя кронштейн натяжителя 31, ролик натяжителя 32, шток 33 с расположенной внутри него пружиной и гайку 34. Функционирует механизм следующим образом: пружина, расположенная внутри штока, через кронштейн натяжителя посредством ролика оказывает давление на ремень, таким образом натягивая его.
При растяжении ремня под действием пружины выдвигается шток и становится видна красная полоса, как показано на фиг.14. В этом случае необходимо подтянуть гайки 34 до исчезновения полосы.
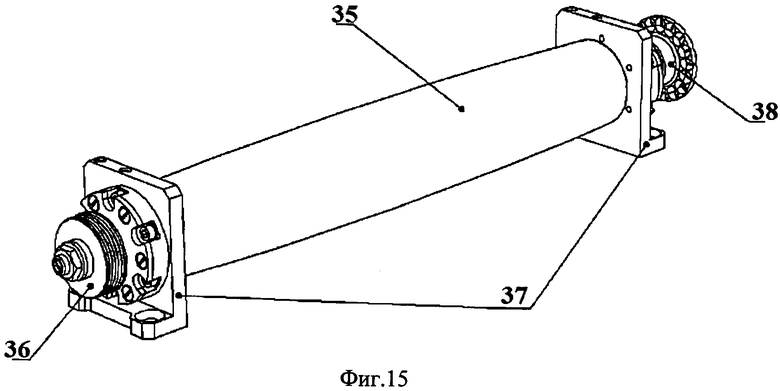
Барабан ведущий 13, показанный на фиг.15, представляет собой бочкообразный вал 35, закрепленный в двух опорах 37. На одной стороне вала находится шкив для поликлинового ремня 36, посредством которого осуществляется передача крутящего момента на вал. На другой стороне - диск механизма стопорения 38.
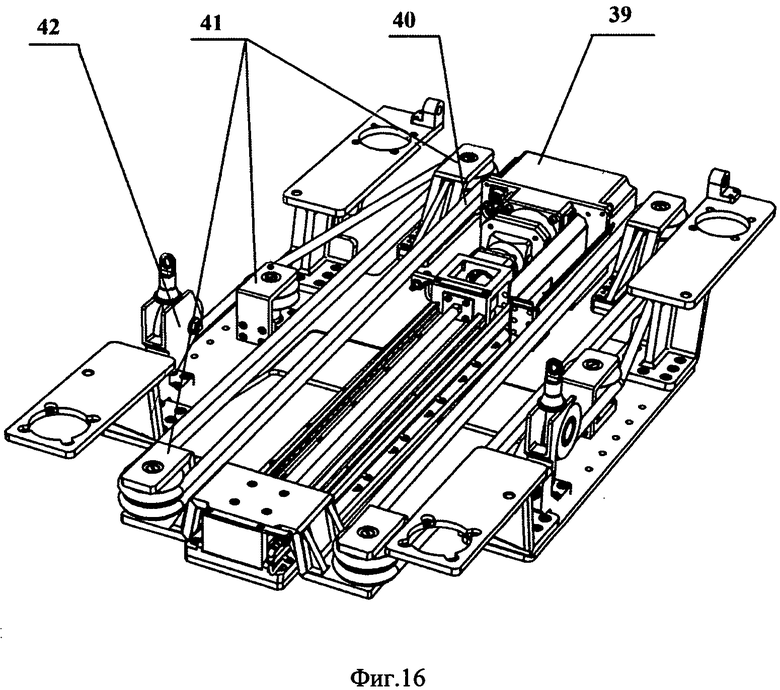
Узел притяга 3, изображенный на фиг.16, входящий в состав БП, предназначен для создания и поддержания при ходьбе и беге продольную осевую нагрузку на космонавта в пределах от 40 кгс до 70 кгс.
Узел притяга 3 состоит из механизма натяжения шнура 39, притяга 40, системы роликов 41 и выводных устройств 42, размещенных на несущей плите.
Узел притяга 3 имеет два крайних положения, одно из которых показано на фиг.16. В процессе эксплуатации положение системы роликов определяется усилием, которое необходимо обеспечить при конкретном режиме тренировок космонавта.
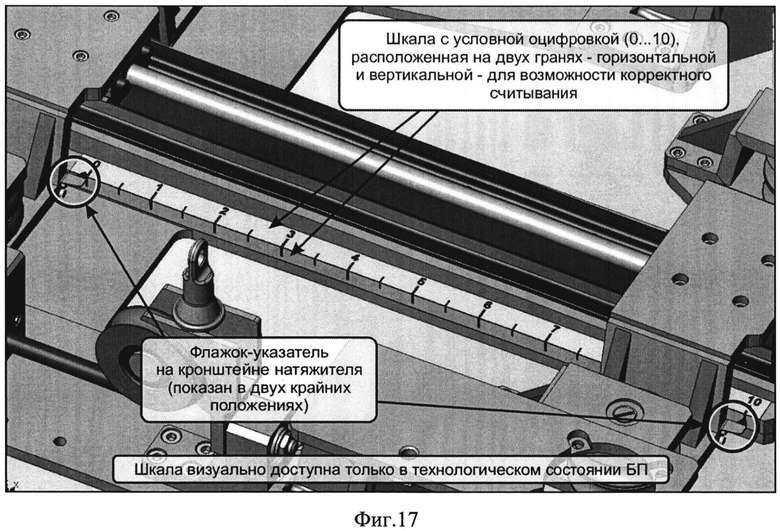
На конструкции узла притяга имеется цифровая шкала, показанная на фиг.17, предназначенная для установки необходимого усилия притяга в случае нештатной работы, когда привод притяга вышел из строя.
Механизм натяжения амортизационного шнура 39, показанный на фиг.18, состоит из линейного модуля 43, приводного модуля 44, электронного модуля 45, концевых датчиков 46 и ручного доводчика 47.
Данный механизм предназначен для перемещения системы роликов и натяжения восьми ветвей амортизационного шнура на величину, необходимую для создания тарированной осевой нагрузки на космонавта во время бега или ходьбы.
Также механизм позволяет производить ручную регулировку необходимой нагрузки при помощи ручного доводчика 47 (фиг.18) и ключа-трещетки с головкой на 10, ориентируясь на положение флажка-указателя кронштейна натяжителя на цифровой шкале, представленной на фиг.17. Данная функция может использоваться во время нештатной ситуации, когда использование автоматического режима невозможно по тем или иным причинам, при этом положение флажка-указателя устанавливается по указаниям с Земли.
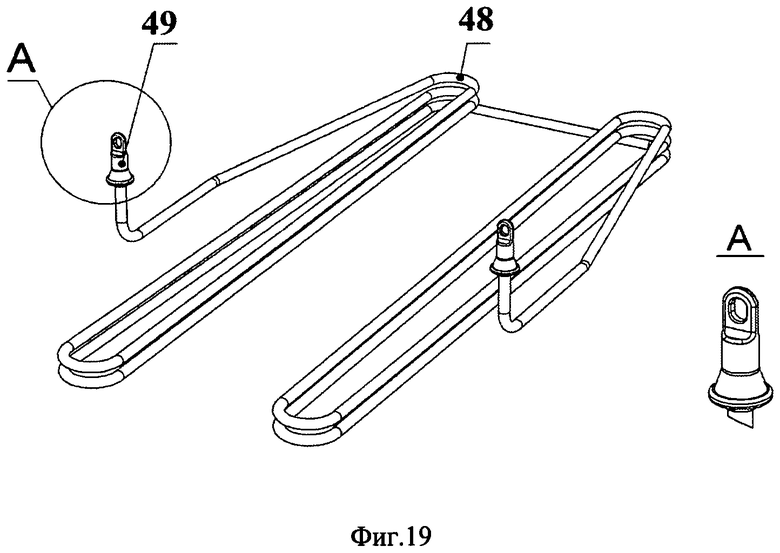
Притяг 40, показанный на фиг.19, представляет собой шнур амортизационный самолетный 48 диаметром 14 мм с закрепленными на своих концах заделками 49.
Притяг предназначен для пристегивания ТНК космонавта к БП и передачи осевой нагрузки непосредственно на космонавта.
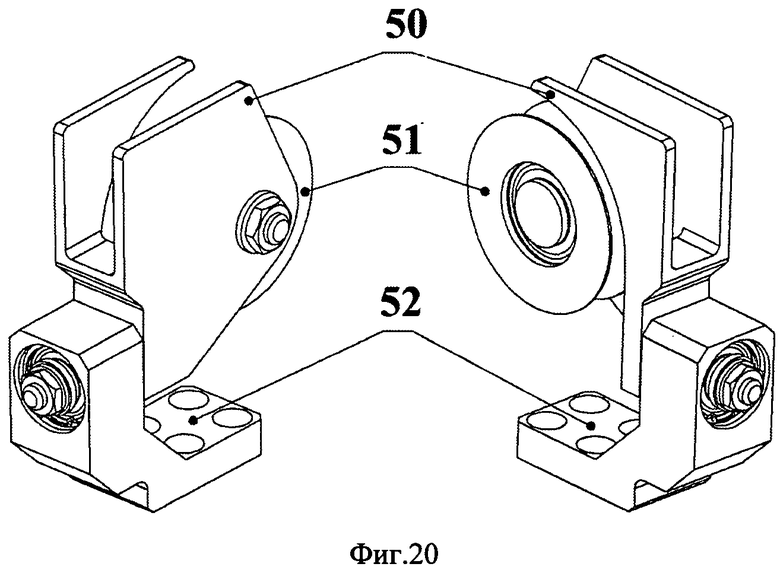
Выводные устройства 42 узла притяга, показанные на фиг.20, состоят из направляющего кронштейна 50, поворотного ролика 51 и корпуса 52.
Выводные устройства узла притяга предназначены для обеспечения возможности поворота амортизационного шнура (при вытяжке) в продольном направлении на угол ±50° и в поперечном - на угол ±20°.
В направляющем кронштейне имеется зазор для монтажа и демонтажа притяга.
Панель управления предназначена для управления тренажером. Управление осуществляется касанием сенсорного экрана по соответствующим кнопкам на нем, в соответствии с интерфейсом управляющей программы.
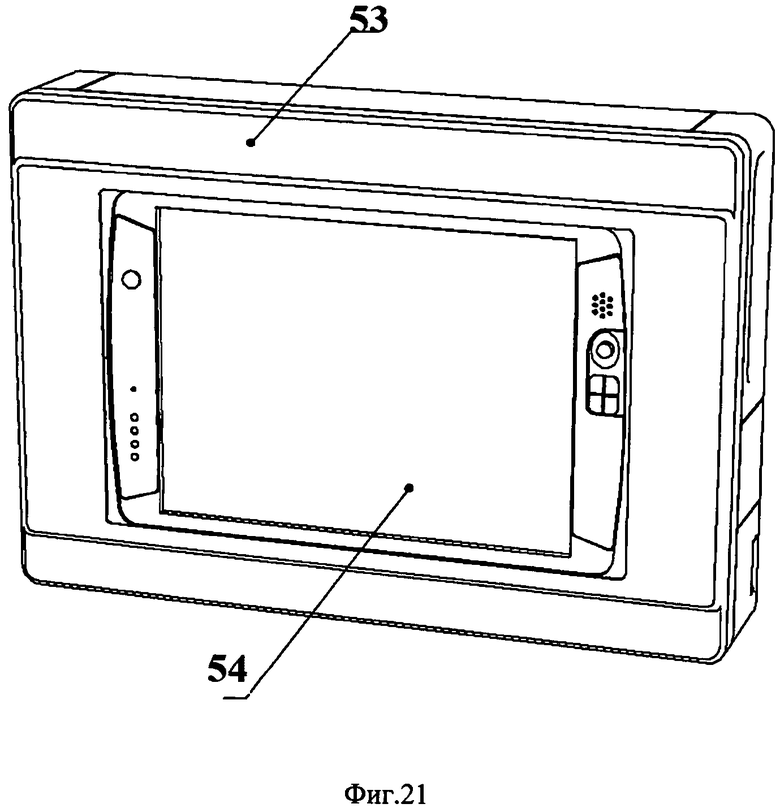
Общий вид панели управления представлен на фиг.21.
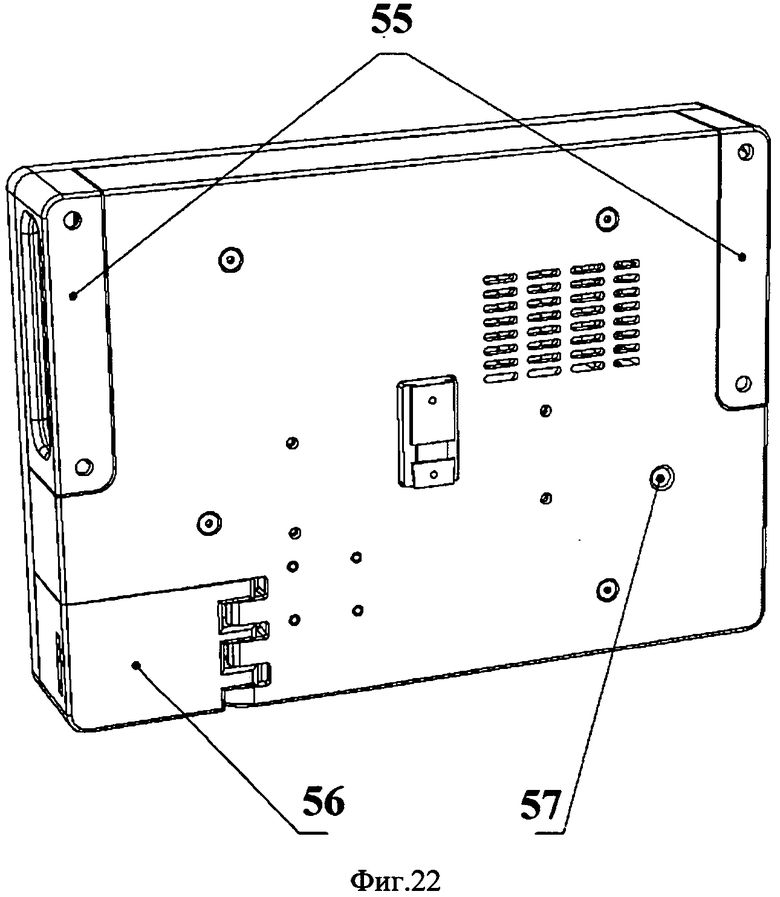
Панель управления 4 представляет собой планшетный компьютер с сенсорным экраном 54, заключенным в корпус 53 (фиг.22).
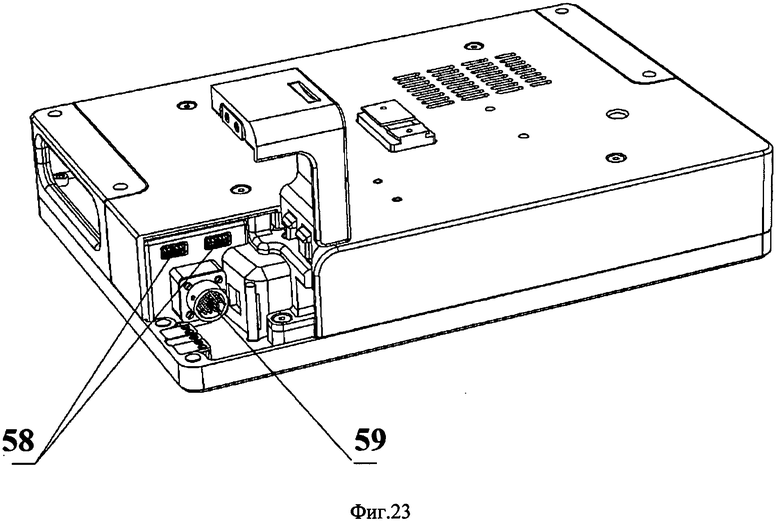
По бокам находятся ручки 55 для удержания и переноса ПУ. На задней стороне расположена откидывающаяся крышка 56, в закрытом положении удерживающаяся магнитами. Под крышкой расположены 2 USB разъема 58 для флэш-накопителя и ЧСС-приемника, а также разъем 59 для кабеля ПУ (фиг.23).
Также на задней стороне расположено отверстие 57, в глубине которого находится кнопка перезагрузки системы («reset»), используемая для аварийного перезапуска системы.
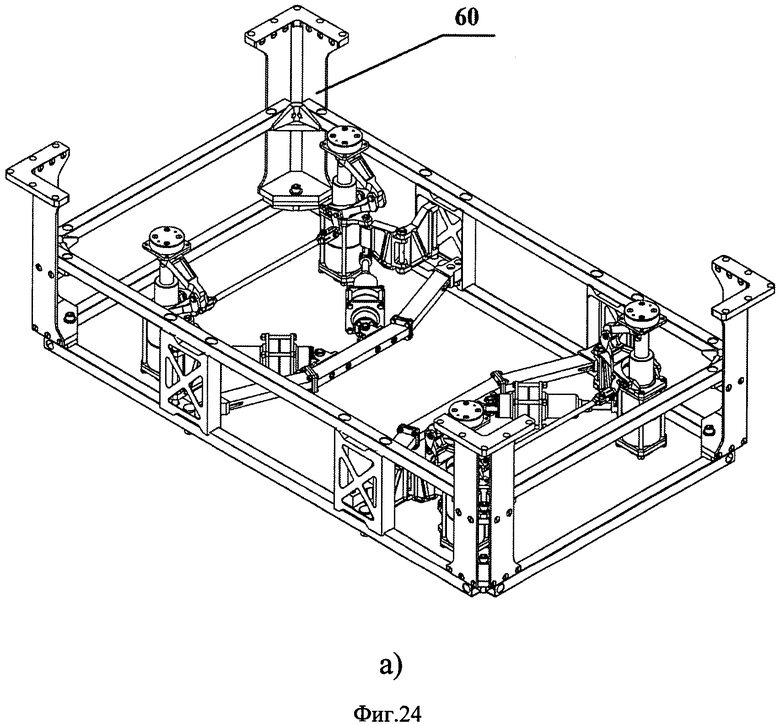
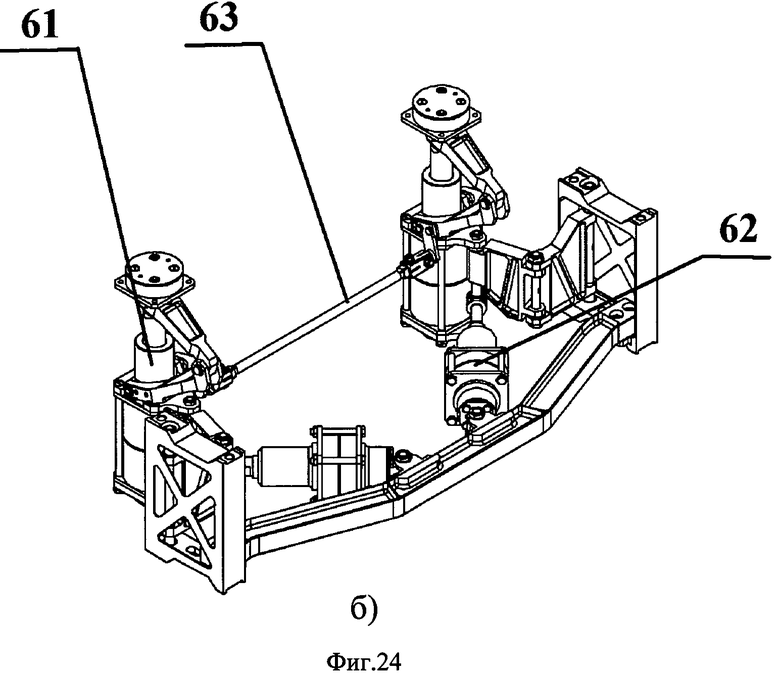
Система виброизоляции 5, представленная на фиг.24, представляет собой пространственную конструкцию (под габариты ниши на борту КА), имеющей узлы крепления к блоку полотна с системой управления и к конструкции КА.
В состав системы виброизоляции 5 входят: рама 60 (1 шт.), виброизолятор основной 61 (4 шт.), виброизолятор боковой 62 (4 шт.) и торсион 63 (2 шт.).
Принцип действия системы виброизоляции основан на ослаблении связей между тренажером и КА, при этом уменьшаются динамические воздействия, передаваемые КА.
Увеличение амплитуды относительных колебаний, связанное с ослаблением связей между тренажером и КА, ограничивается за счет применения тормозных элементов, представляющих из себя подпружиненный упор с сухим трением.
Уменьшение амплитуд угловых колебаний осуществляется за счет элемента стабилизации поперечной устойчивости - торсиона 63.
Основные виброизоляторы 61 обеспечивают уменьшение динамического воздействия на КА в направлении оси Y.
Для уменьшения динамического воздействия в направлениях Х и Z предназначены боковые виброизоляторы 62.
Основные виброизоляторы 61 присоединяются к раме посредством рычагов, обеспечивающих перемещение в направлении осей X и Z.
Система виброизоляции крепится в специальную нишу борта КА при помощи 20 винтов М8.
Тренажер с «бегущей» дорожкой крепится к верхней части системы виброизоляции с помощью 16 винтов М8.
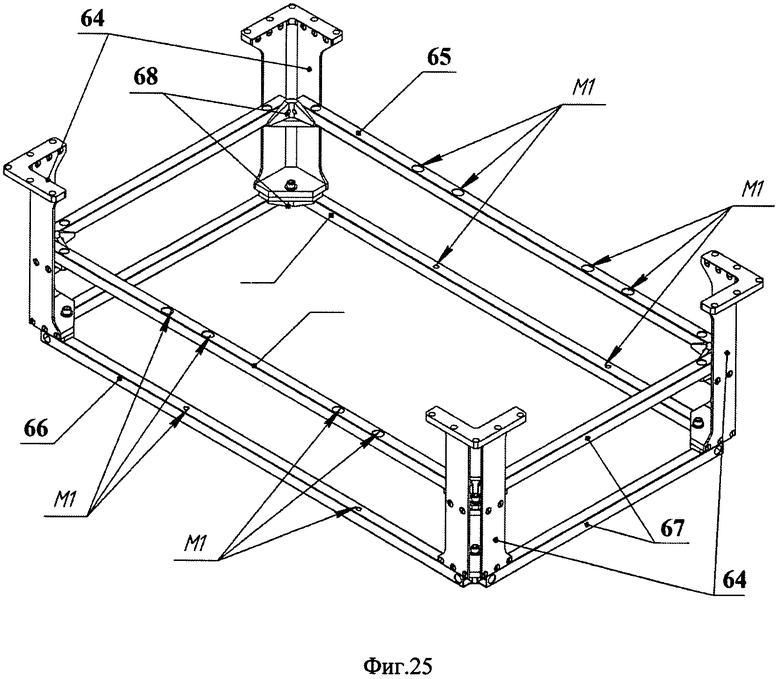
Рама 60 является основным несущим элементом системы виброизоляции, обеспечивающим крепление элементов системы виброизоляции и тренажера.
Конструкция рамы 60 представлена на фиг.25.
Рама 60 состоит из четырех силовых уголков 64, расположенных по углам конструкции, продольных 65, 66 и поперечных 67 балок.
К уголкам 64 рамы через углы 68 с помощью болтового соединения M12 крепятся балки 65, 66 и 67.
Уголки 64 совместно с углами 68, продольными 65, 66 и поперечными 67 балками образуют силовой каркас, обеспечивающий общую конструкционную жесткость, и предназначены для крепления системы виброизоляции совместно с тренажером с «бегущей» дорожкой к КА.
Сборка виброизоляторов присоединяется к раме в местах M1 с помощью винтов с внутренним шестигранником M12.
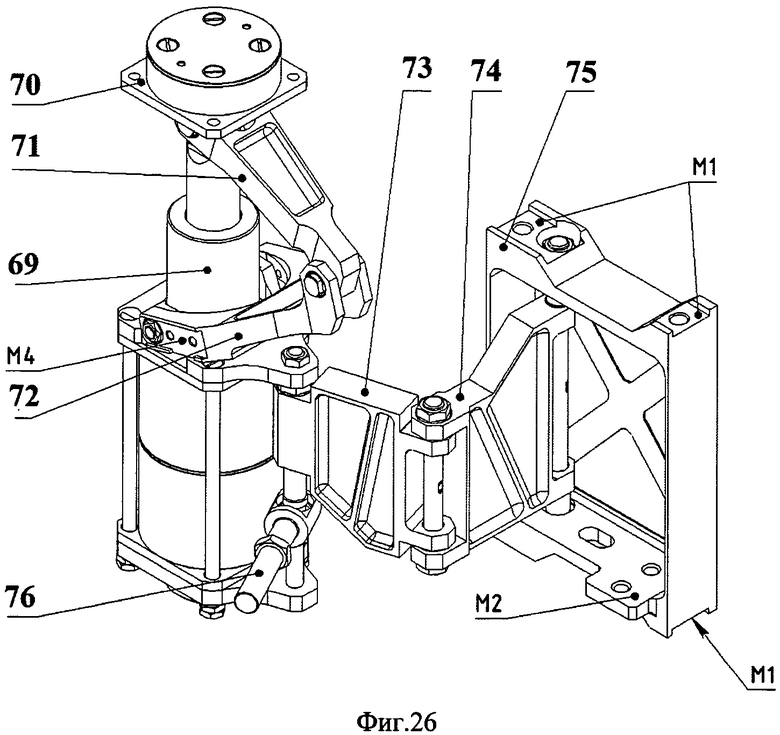
Основной виброизолятор 61 обеспечивает условия микрогравитации в направлении оси Y.
Центральной частью виброизолятора основного 61 является виброизолирующий блок 69 (фиг.26). В верхней части виброизолятора основного 61 расположена упругая муфта 70, обеспечивающая упругое сопряжение блока полотна тренажера и штока виброизолирующего блока. Непосредственно к упругой муфте 70 крепится блок полотна 1 тренажера.
Шлиц-шарнир состоит из двух рычагов: верхнего 71 и нижнего 72. Нижний рычаг шлиц-шаринира соединен с неподвижным в направлении оси Y виброизолирующим блоком 69 и верхним рычагом 71.
Верхний рычаг 71 соединен со штоком виброизолирующего блока 69 и нижним рычагом 72. Для уменьшения трения в сочленениях используются подшипниковые узлы.
Шлиц-шарнир имеет место М4, предназначенное для крепления торсиона.
Вместе с торсионом, шлиц-шарнир образует устройство, предназначенное для поперечной стабилизации углового положения блока полотна тренажера.
Для обеспечения перемещений в направлении осей Х и Z предназначены рычаги 73, 74 и корпус 75. Корпус 75 имеет место для крепления к раме 60. Крепежные отверстия выполнены таким образом, что имеется возможность регулирования положения виброизолятора.
Штырь 76 предназначен для крепления штока виброизолятора бокового 62.
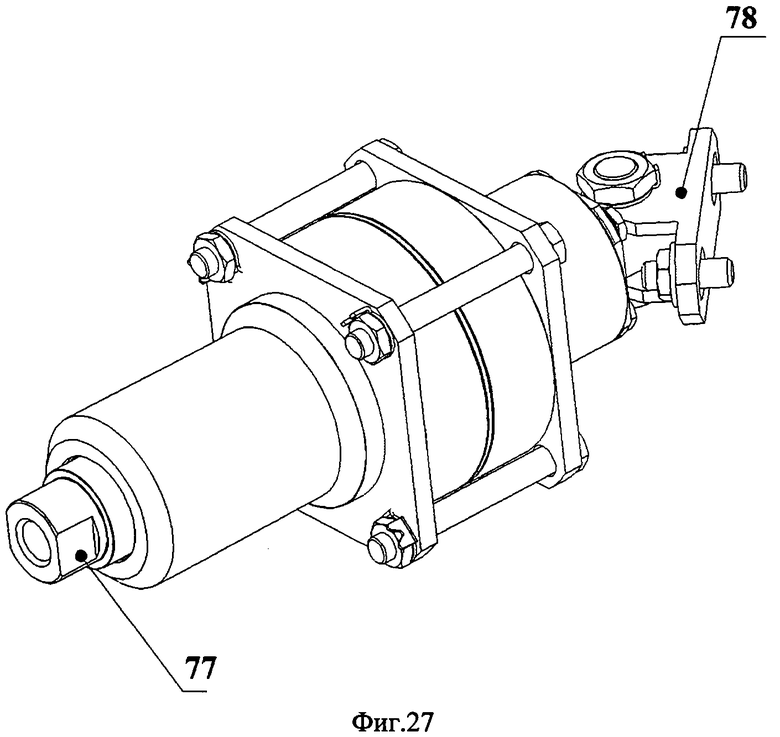
Внешний вид виброизолятора бокового показан на фиг.27.
Виброизолятор боковой предназначен для обеспечения условия микрогравитации в направлении осей Х и Z.
Виброизолятор боковой 62 с помощью специального отверстия в штоке 77 присоединяется к основному виброизолятору 61. Местом 78 виброизолятор боковой крепится к поперечной балке.
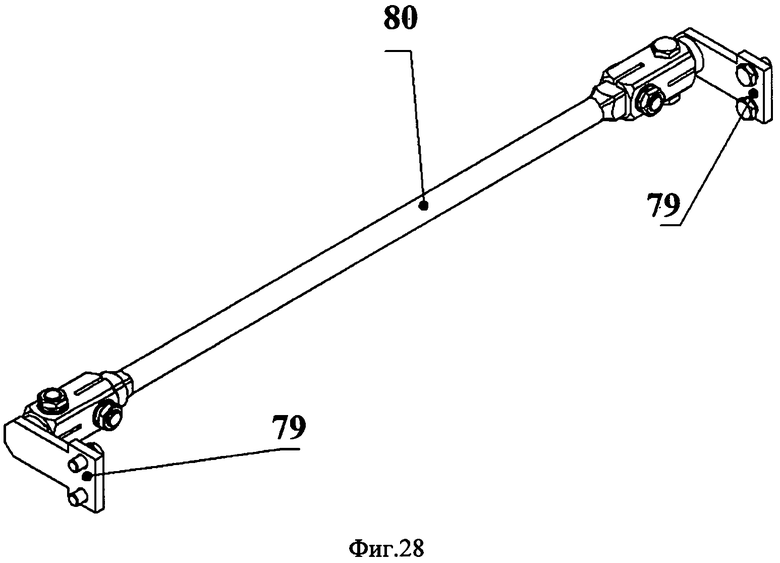
Конструкция торсиона показана на фиг.28, в его состав входят два кронштейна 79 и поперечина 80.
Торсион предназначен для поперечной стабилизации углового положения блока полотна тренажера.
Торсион соединяет нижние рычаги шлиц-шарниров, тем самым выравнивая амплитуду колебаний двух противоположных основных виброизоляторов.
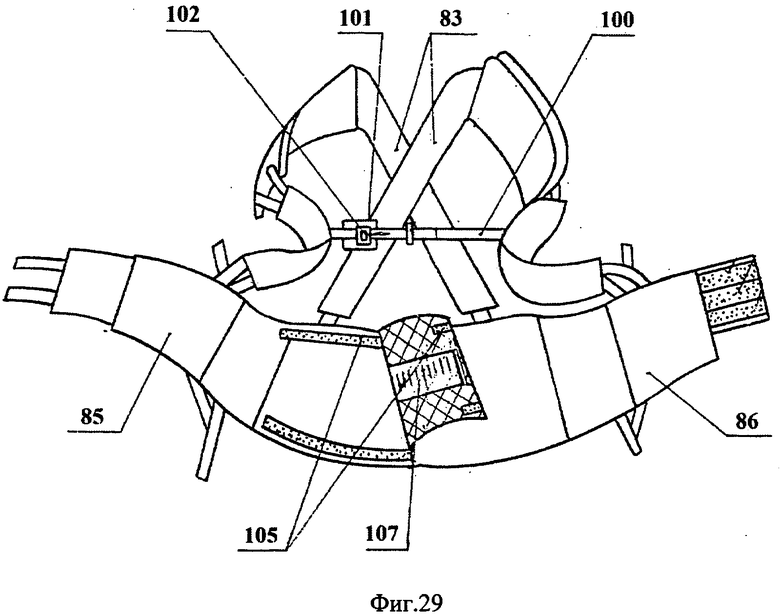
Тренировочно-нагрузочный костюм (ТНК-У-1) предназначен для подсоединения тренирующегося к узлу притяга тренажера «Бегущая дорожка» с целью распределения усилий системы притяга на его тело при ходьбе и беге в условиях невесомости на борту КА. Тренировочно-нагрузочный костюм (ТНК-У-1) является индивидуальным и поставляется для каждого члена экипажа отдельно, при этом хранится на борту КА в специальной сумке в отведенном для него месте.
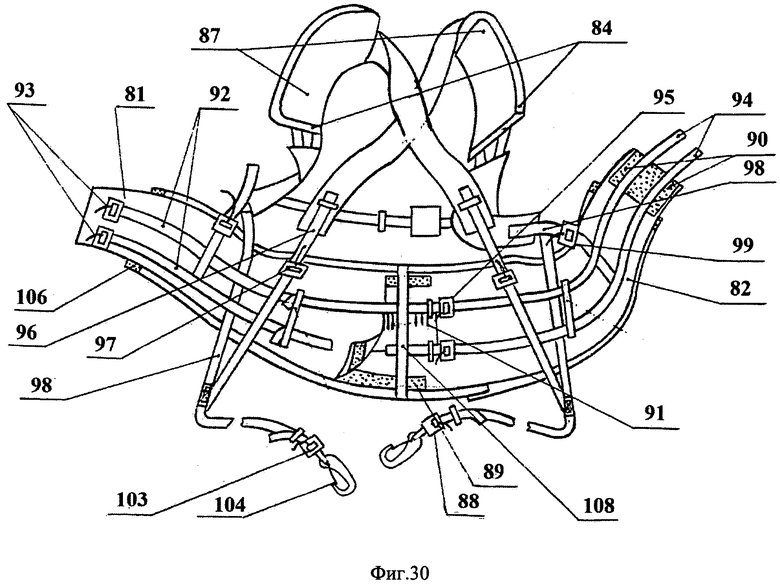
Тренировочно-нагрузочный костюм (ТНК-У-1), показанный на фиг.29, состоит из следующих составных частей: корсета - левой части 81 и правой 82; лямок - 83, 84; подушки корсета - правой 85 и левой 86; чехлов наплечников - 87 (4 пары); поводка - 88.
Корсет выполнен в виде полужесткого широкого пояса, состоящего из двух частей, выстроченного зигзагообразной строчкой.
Левая 81 и правая 82 части соединяются с помощью текстильных застежек 89, 90, которые одновременно служат и для регулирования корсета по бедрам оператора.
Регулирование корсета осуществляется по рискам 91, обозначенным числами (размерами) 44, 46. 48, 50, 52, 54, соответствующими обхватам груди оператора от 88 до 108 см (с 44 по 54 размер).
Риски нанесены на правой части корсета.
На левую часть корсета 81 настрочены ремни 92, заканчивающиеся пряжками 93, а на правой части корсета 82 - ремни 94, заканчивающиеся пряжками 95.
К верхнему краю корсета присоединены лямки 83, 84.
Внутри лямок размещены силовые элементы, служащие для создания нагрузки на плечи оператора.
Каждый силовой элемент состоит из двух эспандеров, заправленных в чехлы, и заканчивается сзади лентой 96, а спереди полукольцом эспандера.
Лента 96 силового элемента присоединена сзади к корсету при помощи пряжки 97.
Противоположный конец лямок 83 и 84 соединяется с корсетом (спереди) держателем поводка 98, который проходит через полукольцо эспандера, затягивается на пряжку корсета 99 и служит для регулирования натяжения силового элемента.
Лямки соединены на груди при помощи ленты 100 и нагрудной подушки 101.
Нагрудная подушка 101, расположенная под пряжкой 102, служит для предохранения от болевых ощущений (наминов).
Подгонка костюма по росту оператора осуществляется при помощи пряжек 99 и 97.
Для равномерного распределения продольных нагрузок лямки 83 и 84 должны быть установлены в удобном для оператора положении при помощи пряжек 99 и 97.
Чехлы наплечников 87 крепятся к лямке 83 и 84 при помощи текстильной застежки и служат для предохранения наплечников от намокания.
По боковым сторонам корсета имеются держатели поводка 98, заправленные в пряжку 103 поводка, заканчивающегося карабином 104.
Держатели поводков в зависимости от роста человека могут регулироваться.
Подушки корсета (правая 85 и левая 86) соединяются при помощи текстильной застежки 105 и служат для предохранения от болевых ощущений (наминов).
Подушки корсета 85 и 86 крепятся к внутренней стороне корсета при помощи текстильной застежки 106.
На левой подушке нанесены риски 107, обозначенные числами (размерами) 44, 46, 48, 50, 52, 54, соответствующими обхватам груди от 88 до 108 см (с 44 по 54 размер), которые при регулировании корсета по бедрам должны соответствовать рискам 91, нанесенным на правой части корсета.
Подушки, прикрепленные к корсету, дополнительно фиксируются на корсете при помощи текстильной застежки держателя подушки 108.
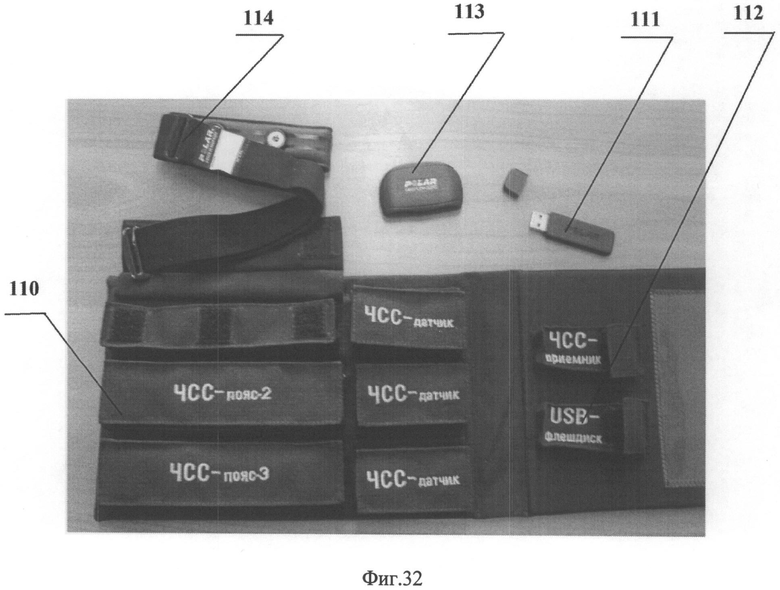
Укладка принадлежностей предназначена для размещения и хранения на борту КА ЧСС-монитора, в который входят ЧСС-приемник, ЧСС-датчик, ЧСС-пояс, и USB-флеш-диска, необходимых для использования с тренажером во время тренировок (ЧСС-частота сердечных сокращений).
Укладка принадлежностей 109, представленная на фиг.30 и 31, представляет собой складной чехол, сшитый из текстильного материала («Номекс») с внутренними карманами (для размещения принадлежностей), оснащенными крючково-петельными застежками «Велькро», предотвращающими самопроизвольное открывание. Состоит укладка из чехла 110 (1 шт.), ЧСС-приемника 111 (1 шт.), USB-флеш-диска 112 (1 шт.), ЧСС-датчиков 113 (3 шт.) и ЧСС-поясов 114 (3 шт.).
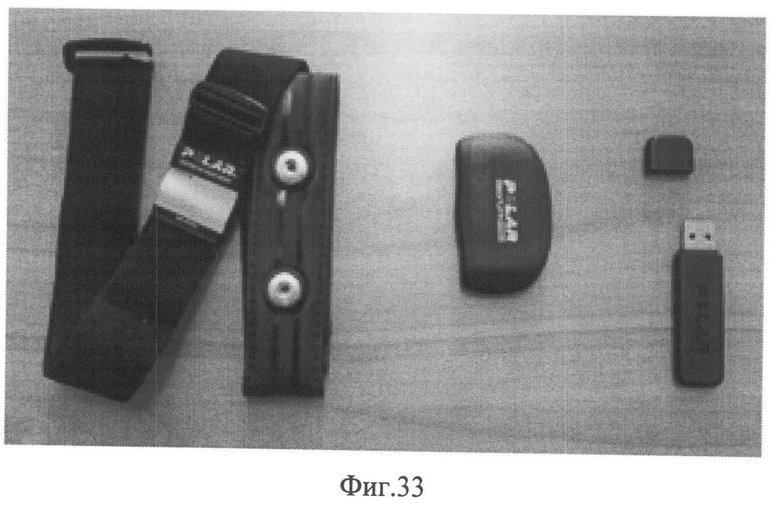
ЧСС-монитор фирмы «POLAR» (Финляндия), показанный на фиг.32, состоящий из ЧСС-приемника 111, ЧСС-датчика 113 и ЧСС-пояса 114, предназначен для регистрации частоты сердечных сокращений тренирующегося в реальном масштабе времени и передачи ЧСС-сигнала на ПУ тренажера с целью его индикации и записи в файл данных текущей тренировки (фиг.33).
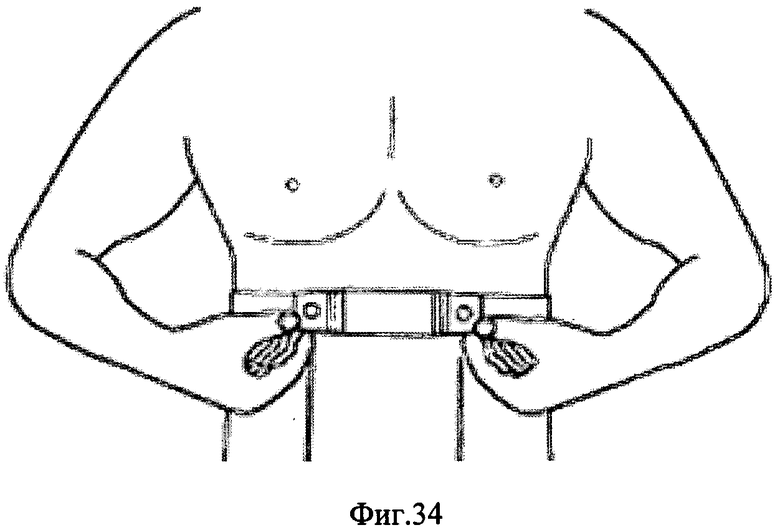
Съем ЧСС-сигнала с тела тренирующегося осуществляется по средствам ЧСС-датчика, закрепленного на груди тренирующегося при помощи ЧСС-пояса. Датчик к поясу крепится при помощи быстроразъемных контактов, в соответствии с маркировкой его контактов: «R» - правая сторона, «L» - левая сторона.
ЧСС-пояс имеет регулировку размера и снабжен эластичным ремешком, обеспечивающим комфортное использование в процессе тренировки. Одевается ЧСС-пояс с прикрепленным ЧСС-датчиком на тело тренирующегося, как показано на фиг.34.
ЧСС-приемник обеспечивает беспроводной прием ЧСС-сигнала тренирующегося в реальном масштабе времени и передает его на ПУ тренажера, для чего подключается в один из USB-разъемов ПУ, указанных на фиг.23. Прием и передача ЧСС-сигнала осуществляется в автоматическом режиме.
USB-флеш-диск, показанный на фиг.31, фирмы Transcend (модель JetFlash V70 4GB) предназначен для переноса файлов данных тренировок, записанных в памяти ПУ, на бортовой компьютер для последующего сброса на Землю по каналам телеметрии.
USB-флеш-диск JetFlash V70, с объемом памяти 4 Гб (объем памяти может отличаться от указанного), выполнен в ударопрочном, влагопыленепроницаемом корпусе, обеспечивающем надежное функционирование в условиях космического полета.
Таким образом, раскрытое выше конструктивное выполнение заявленного тренажера позволяет обеспечить достижение указанного технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЕР С "БЕГУЩЕЙ" ДОРОЖКОЙ | 2005 |
|
RU2309783C2 |
| КОМПЛЕКС СРЕДСТВ ЗАЩИТЫ КОСМОНАВТОВ ОТ НЕГАТИВНОГО ВОЗДЕЙСТВИЯ НЕВЕСОМОСТИ | 2014 |
|
RU2571888C1 |
| ПРОТИВОПЕРЕГРУЗОЧНЫЙ КОСТЮМ БЕСКАМЕРНОГО ТИПА | 2003 |
|
RU2254272C2 |
| Устройство для тренировки бега по пересеченной местности | 2021 |
|
RU2775444C1 |
| ИМИТАТОР БЕГА И ХОДЬБЫ КОСМОНАВТА НА БОРТУ КОСМИЧЕСКОГО ОБЪЕКТА | 2000 |
|
RU2196086C2 |
| ИМИТАТОР БЕГА И ХОДЬБЫ КОСМОНАВТА НА БОРТУ КОСМИЧЕСКОГО ОБЪЕКТА | 2000 |
|
RU2196085C2 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ ХОДЬБЫ С СИСТЕМОЙ ОБРАТНОЙ СВЯЗИ | 2012 |
|
RU2506069C2 |
| ТРЕНАЖЁРНЫЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ ЭКИПАЖЕЙ КОСМИЧЕСКИХ КОРАБЛЕЙ К ДЕЙСТВИЯМ ПОСЛЕ ПОСАДКИ ПИЛОТИРУЕМОЙ КАПСУЛЫ НА МОРЕ С ВОЛНЕНИЕМ | 2020 |
|
RU2734659C1 |
| ТРЕНАЖЕР КОСМОНАВТА | 2012 |
|
RU2490182C1 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ ОТ КОЛЕБАНИЙ УПРУГОЙ КОНСТРУКЦИИ КОСМИЧЕСКОЙ ТРАНСФОРМИРУЕМОЙ АНТЕННЫ В ПРОЦЕССЕ ЭКСПЛУАТАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2161109C1 |



Изобретение относится к космической технике, более конкретно к устройству для физических упражнений, в частности ходьбы и бега с созданием продольной осевой нагрузки на космонавта, предназначенного для использования в космическом аппарате (КА) в условиях невесомости. Техническим результатом заявленного изобретения является исключение передачи действия динамических сил, возникающих при работе тренажера, в виде толчков, ударов, колебаний и, как следствие, нагружений на конструкцию КА при тренировках космонавтов на тренажере с "бегущей" дорожкой на борту космического аппарата (КА), возможность работы тренажера как в ручном, так и в автоматическом режимах (по запрограммированным протоколам), возможность формирования файла с данными тренировки с последующей передачей на Землю, наличие тензоизмерительной системы (измерение и регистрация силы опорной реакции, усилия системы притяга и натяжения полотна), а также сокращение времени технического обслуживания заявленного тренажера. 19 з.п. ф-лы, 34 ил.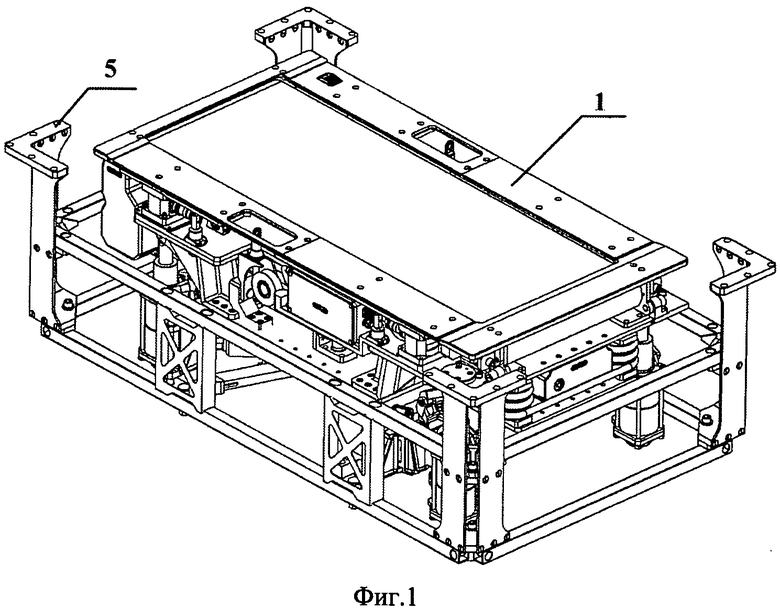
1. Тренажер с «бегущей» дорожкой для космического аппарата, содержащий панель управления и блок полотна, прикрепленный к системе виброизоляции и состоящий из узла опорного и узла притяга, имеющих возможность поворачиваться относительно друг друга на угол до 90°, при этом узел опорный включает в себя полотно, приводной двигатель, связанный через ремень с ведущим барабаном, ведомый барабан, узел роликов, механизм натяжения ремня, тензосистему и блок управления, а узел притяга содержит двигатель, амортизационный шнур, на концах которого закреплены заделки, взаимодействующий с системой роликов, механизмом натяжения и выводными устройствами, размещенными на несущей плите, и выполнен с возможностью прикрепления к нему тренировочно-нагрузочного костюма космонавта.
2. Тренажер по п.1, отличающийся тем, что панель управления содержит в себе планшетный компьютер с сенсорным экраном, заключенным в корпус.
3. Тренажер по п.1, отличающийся тем, что полотно представляет собой ленту, выполненную из резины и предназначенную для передачи движения человеку с помощью непосредственного контакта.
4. Тренажер по п.1, отличающийся тем, что тензосистема включает в себя четыре тензодатчика, два блока тензоусилителей и два датчика силы.
5. Тренажер по п.1, отличающийся тем, что приводной двигатель содержит корпус, блок электроники и выходной вал со шкивом.
6. Тренажер по п.1, отличающийся тем, что блок управления представляет собой блочно-модульную конструкцию, включающую в себя модуль управления приводным двигателем, модуль управления двигателем узла притяга, модуль связного контроллера, модуль источника питания, модуль реле.
7. Тренажер по п.1, отличающийся тем, что узел роликов представляет собой основание с размещенными в нем блоками роликов и служит опорой для полотна.
8. Тренажер по п.1, отличающийся тем, что ведомый барабан представляет собой бочкообразный вал, закрепленный в двух опорах, и предназначен для поддержки и натяжения полотна.
9. Тренажер по п.1, отличающийся тем, что механизм натяжения ремня включает в себя кронштейн натяжителя, ролик натяжителя, шток с расположенной внутри него пружиной и гайку.
10. Тренажер по п.1, отличающийся тем, что ведущий барабан представляет собой бочкообразный вал, закрепленный в двух опорах, на одной стороне которого находится шкив для поликлинового ремня, осуществляющего передачу крутящего момента на вал, а на другой стороне - диск механизма стопорения.
11. Тренажер по п.1, отличающийся тем, что механизм натяжения амортизационного шнура состоит из линейного модуля, приводного модуля, электронного модуля, концевых датчиков и ручного доводчика.
12. Тренажер по п.1, отличающийся тем, что амортизационный шнур является амортизационным шнуром самолетным диаметром 14 мм.
13. Тренажер по п.1, отличающийся тем, что выводные устройства узла притяга состоят из направляющего кронштейна, поворотного ролика и корпуса.
14. Тренажер по п.2, отличающийся тем, что по бокам корпуса находятся ручки для удержания и переноса панели управления (ПУ), при этом на задней стороне корпуса расположена откидывающаяся крышка, в закрытом положении удерживающаяся магнитами, под крышкой расположены два USB разъема для флэш-накопителя и ЧСС-приемника, а также разъем для кабеля ПУ.
15. Тренажер по п.1, отличающийся тем, что система виброизоляции представляет собой пространственную конструкцию, имеющую узлы крепления к блоку полотна с системой управления и к конструкции космического аппарата и содержащую раму, четыре виброизолятора основных, четыре виброизолятора боковых и два торсиона.
16. Тренажер по п.15, отличающийся тем, что рама состоит из четырех силовых уголков, расположенных по углам конструкции, продольных и поперечных балок, при этом к уголкам рамы через углы с помощью болтового соединения крепятся балки, уголки совместно с углами, продольными и поперечными балками образуют силовой каркас, обеспечивающий общую конструкционную жесткость.
17. Тренажер по п.15, отличающийся тем, что виброизолятор основной содержит виброизолирующий блок, упругую муфту, расположенную в верхней части виброизолятора основного и обеспечивающую упругое сопряжение блока полотна тренажера и штока виброизолирующего блока, шлиц-шарнир, состоящий из верхнего и нижнего рычагов, при этом нижний рычаг соединен с неподвижным в направлении оси Y виброизолирующим блоком и верхним рычагом, а верхний рычаг соединен со штоком виброизолирующего блока и нижним рычагом, шлиц-шарнир имеет место, предназначенное для крепления торсиона, вместе с торсионом шлиц-шарнир образует устройство, предназначенное для поперечной стабилизации углового положения блока полотна тренажера, для обеспечения перемещений в направлении осей Х и Z предназначены рычаги и корпус, имеющий место для крепления к раме, а также штырь, предназначенный для крепления штока бокового виброизолятора.
18. Тренажер по п.15, отличающийся тем, что в состав торсиона входят два кронштейна и поперечина.
19. Тренажер по п.1, отличающийся тем, что тренировочно-нагрузочный костюм состоит из корсета - левой и правой частей, лямок, правой и левой подушек корсета, чехлов наплечников и поводка.
20. Тренажер по п.1, отличающийся тем, что дополнительно включает укладку принадлежностей для размещения и хранения ЧСС-монитора, в который входят ЧСС-приемник, ЧСС-датчик, ЧСС-пояс, и USB-флеш-диска.

