Изобретение относится к физической культуре и спорту, а также к тренажерам, предназначенным для активных упражнений.
Из уровня техники известно «Устройство для тренировки» [1] состоящее из поручней, прикрепленных к рамному основанию на котором устанавливается вогнутая беговая дорожка, выполненная в виде секций, каждая из которых имеет собственный радиус кривизны, снабженных покрытием, и имеющими возможность изменять положение относительно средней секции посредством шарниров и фиксации этого положения посредством передвижных упоров.
Недостатком данного устройства является отсутствие возможности динамического изменения нагрузки, задаваемой посредством изменения угла наклона секций, относительно средней части тренажера, непосредственно в процессе тренировки.
Также, известен «Тренажер для бега и массажа» [2], представляющий собой закрепленную на рамном основании беговую дорожку, все беговое поле которой изогнуто по дуге окружности, в которой низшая точка находится на расстоянии 3/4 длины бегового поля от последнего ролика.
К недостаткам данного решения можно отнести также, как и в первом случае отсутствие возможности динамически изменять нагрузку, в процессе тренировки, а также отсутствием возможности осуществления беговых упражнений, используемых для тренировки бега по пересеченной местности.
Также, известна «Дорожка для бега галопом» [3], представляющая собой совокупность движущихся поверхностей, одна из которых выполняет роль полотна для отталкивания ногами, а две другие - поручней для отталкивания руками, при этом осуществляется тренировка многих групп мышц, а также ловкости и выносливости. Вместе с тем, данный тренажер не в полной мере позволяет воспроизводить условия напряжения и концентрации внимания тренирующегося, сопутствующие бегу по пересеченной местности, и, следовательно - не достаточно эффективен.
Наиболее близким по технической сути, является известное из уровня техники «Устройство для тренировки в спортивных локомоциях» [4], включающее барабаны, которые установлены на раме и охвачены транспортерной лентой, средство для изменения угла наклона транспортерной ленты относительно ее продольной и поперечной осей, которое включает электропривод барабанов, блок управления, средство для отображения вида профиля трассы, средство для фиксации положения спортсмена над лентой и создания тяговых усилий, датчик для регистрации кинематической характеристики ленты, оснащенное средством для создания микроклимата, и средством имитации препятствий.
К недостаткам аналога следует отнести то, что при имитации препятствий методом создания голограмм над лентой тредбана нет возможности полноценного взаимодействия с объектами пересеченной местности при тренировке (наскок на препятствия и т.п.), что снижает эффективность тренировки, равно как и при перемещении механических блоков над лентой тредбана, при котором дополнительно возникает опасность травмирования: в случаях зацепа за препятствие, неполного его преодоления. Кроме того, в последнем случае количество и тип неровностей местности, имитируемых тренажером ограничено количеством и конфигурацией применяемых средств имитации препятствий, что сужает возможности варьирования имитируемых типов тренировочных трасс.
Задачей настоящего изобретения является устранение недостатков присущих прототипу, повышение эффективности тренировок при выполнении беговых упражнений на беговых тренажерах, расширение спектра моделируемых тренировочных трасс и увеличения эффекта реалистичности при тренировке бега по пересеченной местности.
Техническими результатами заявленного устройства являются: повышение эффективности тренировок беговых упражнений при беге по пересеченной местности, повышение степени реалистичности условий их выполнения обеспечение возможности моделирования беговых трасс различных конфигураций, в том числе со сложным рельефом.
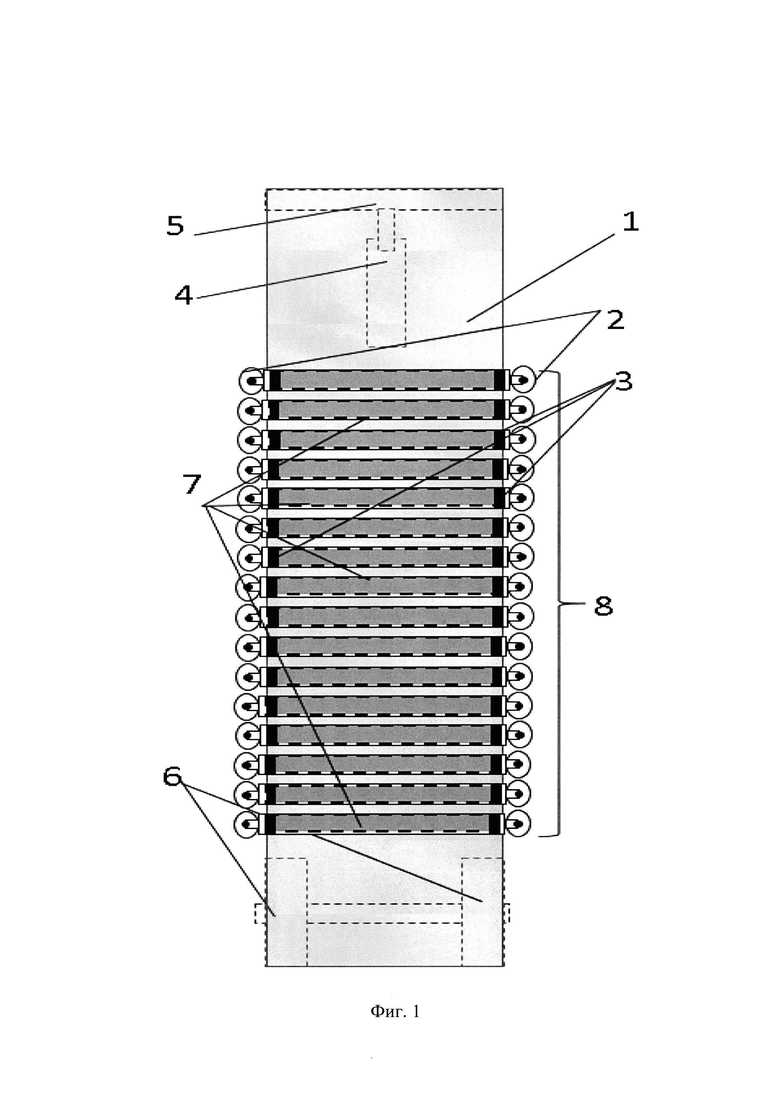
Технический результат достигается за счет того, что устройство содержит беговое полотно 1, которое вдоль всей рабочей поверхности 8 опирается на находящиеся под ним опорно-соединительные ролики 2, оси вращения 10 которых соединяют между собой симметрично расположенные относительно продольной оси бегового полотна 1 пары рабочих штоков 11 возвратно-поступательных механизмов 2, которые обеспечивают возможность за счет последовательного перемещения в вертикальной плоскости имитации неровностей местности при движении бегового полотна, и соединенные с расположенными со стороны рабочей зоны 8 бегового полотна 1 прижимные ролики-фиксаторы бегового полотна 3.
Таким образом, появляется возможность имитации условий, сопутствующих бегу по местности со сложным рельефом, который моделируется за счет того, что поверхность беговой дорожки опирается на систему опорно-соединительных роликов, имеющих возможность перемещения в вертикальной плоскости за счет устанавливаемых на их торцах возвратно-поступательных механизмов, при этом скорость, очередность и величина последовательного перемещения в вертикальной плоскости опорно-соединительных роликов соответствует скорости движения бегового полотна, создавая, таким образом, для тренирующегося эффект надвигающихся со скоростью его движения препятствий (неровностей рельефа местности), обеспечивая за счет этого имитацию бега по местности со сложным рельефом, что требует от занимающегося дополнительных контроля координации, регуляции дыхания, концентрацию внимания и т.д., реализуя тем самым заявленную задачу изобретения и расширяя спектр возможностей тренировки сложных беговых упражнений на тренажерных системах.
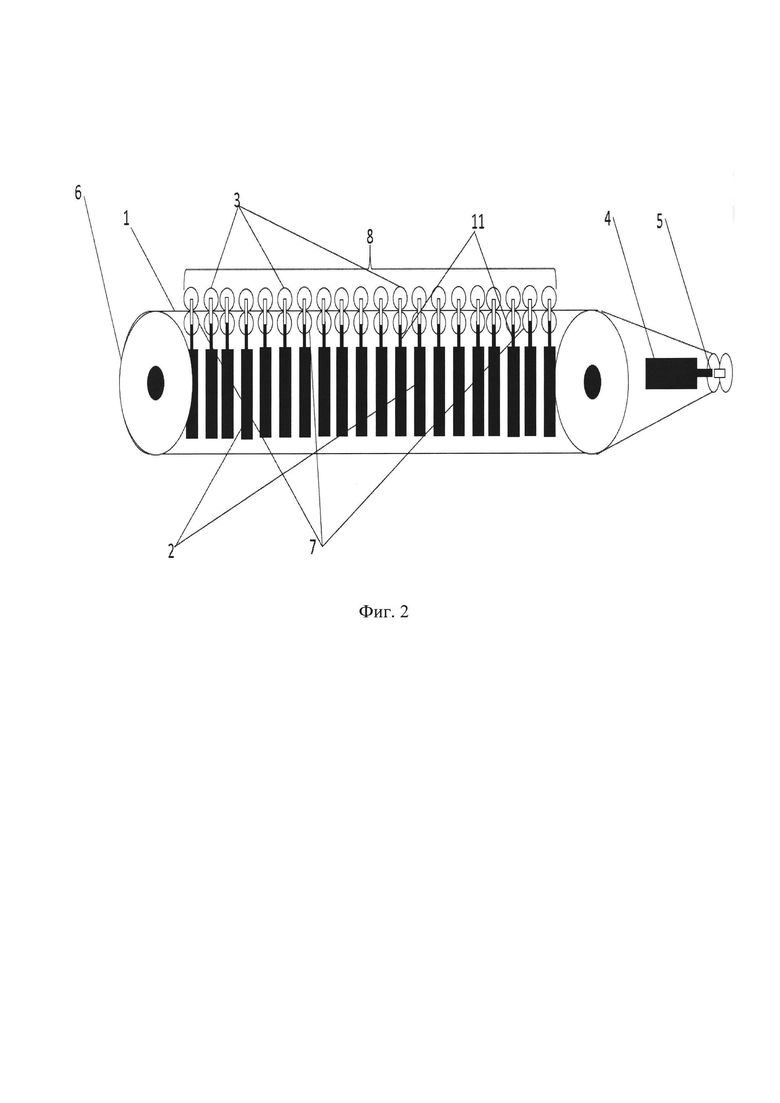
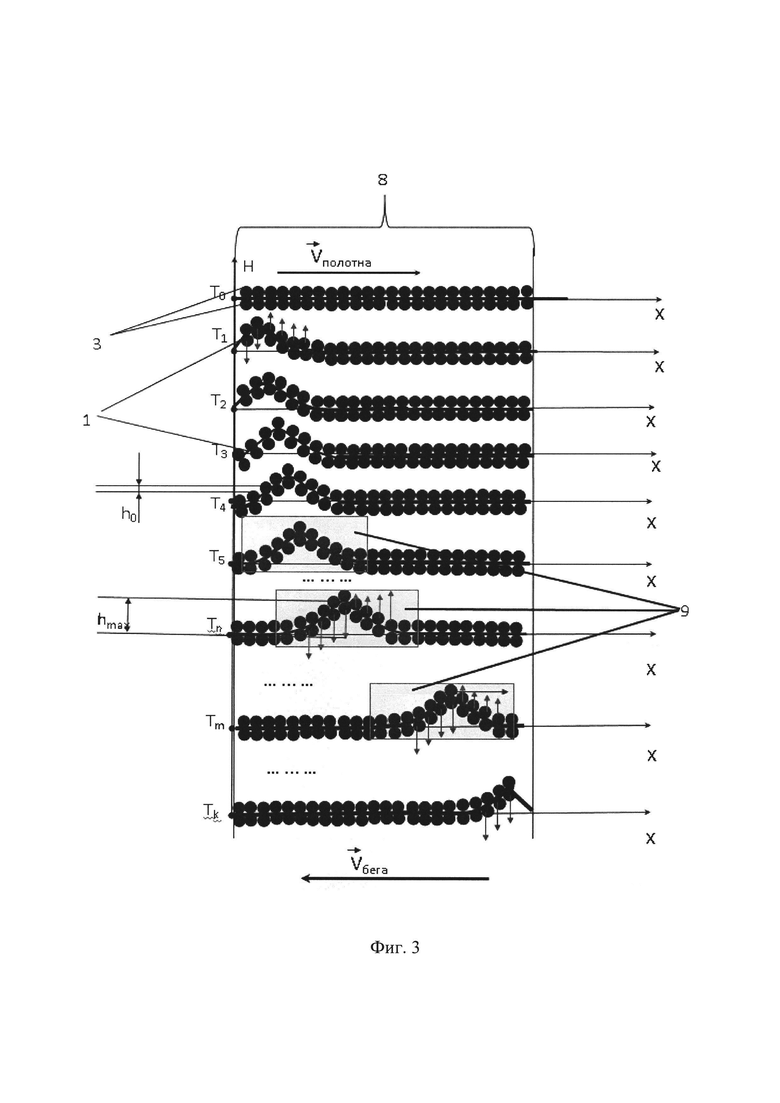
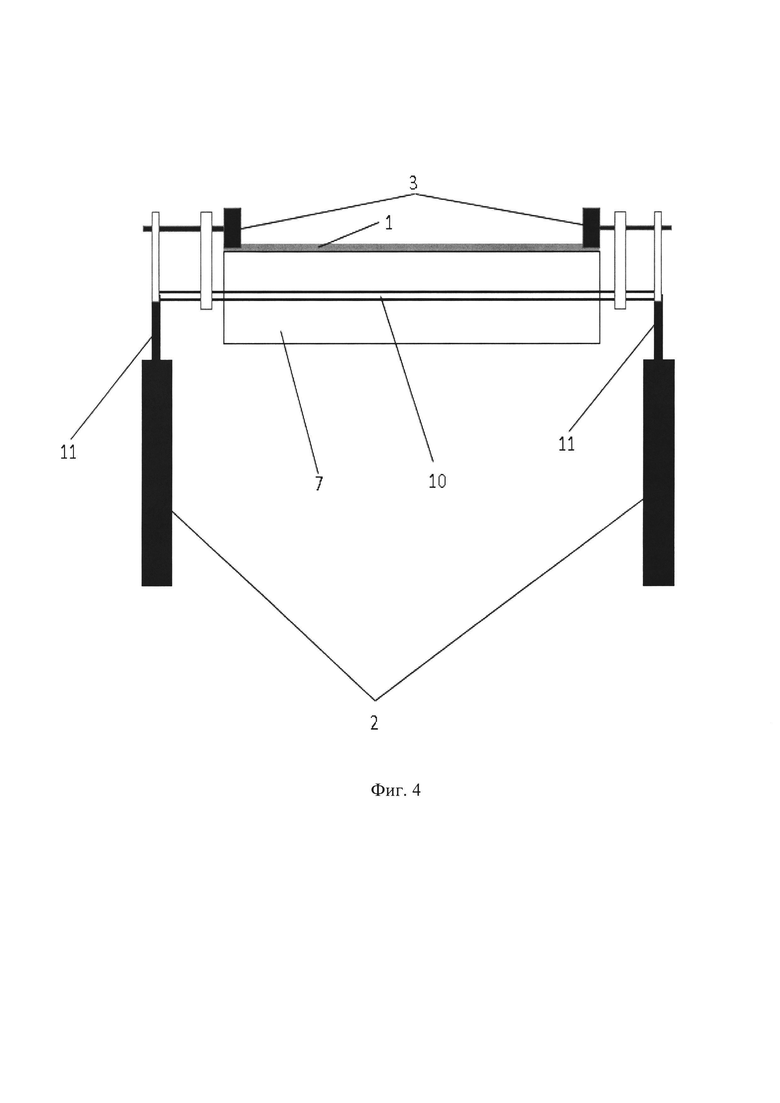
Устройство и работа тренажера поясняется чертежами, где на фиг. 1 представлен вид сверху на беговое полотно, на фиг. 2 - вид сбоку, фиг. 3 демонстрирует положение подвижных элементов тренажера, непосредственно взаимодействующих с беговым полотном и обеспечивающих имитацию сложного рельефа в различные моменты работы тренажера на некотором промежутке времени в боковой проекции. На фиг. 4 - поперечный разрез конструкции тренажера плоскостью, перпендикулярной продольной оси бегового полотна, демонстрирующий устройство механизма, обеспечивающего плотное прилегание бегового полотна вдоль всей длины его рабочей зоны к элементам тренажера, обеспечивающим достижение заявленного результата. На приведенных фигурах обозначены следующие элементы:
1 - беговое полотно;
2 - возвратно-поступательный механизм;
3 - прижимные ролики фиксаторы бегового полотна;
4 - привод механизма натяжения бегового полотна;
5 - ролик-натяжитель бегового полотна;
6 - привод электродвигателя;
7 - опорно-соединительные ролики;
8 - рабочая зона тренажера;
9 - группы элементов (опорно-соединительных и прижимных роликов фиксаторов бегового полотна), участвующих в имитации неровности маршрута в различные моменты времени (Т5 Tn, Tm);
10 - ось вращения опорно-соединительного ролика;
11 - рабочий шток возвратно-поступательного механизма.
Устройство работает следующим образом:
Имитация неровностей трассы при тренировке осуществляется за счет последовательного задействования рабочих штоков 11 некоторой совокупности пар возвратно-поступательных механизмов 2, расположенных по разные стороны бегового полотна, рабочие штоки 11 которых попарно соединены с опорно-соединительными роликами 2 (как показано на фиг. 4), задача которых состоит в обеспечении жесткости имитируемого препятствия.
На фиг. 3 в боковой проекции условно показаны положения опорно-соединительных роликов 7 и соответствующих роликов-фиксаторов бегового полотна 1 в моменты времени от момента То (в верхней части фигуры 3) - момент времени, когда начинается имитация неровностей местности (наличие на маршруте движения «кочки»), далее (ниже на фиг. 3), в последующие моменты времени T1, T2, … Tk. Опорно-соединительные ролики 7, вместе с роликами-фиксаторами бегового полотна 1 приводятся в движение посредством перемещения рабочих штоков 11 возвратно-поступательных механизмов 2 на величину и с частотой, зависящим от скорости движения бегового полотна и конфигурации имитируемых препятствий. Стрелками на фиг. 3 обозначены направления движения опорно-соединительных роликов 7 и соответствующих роликов-фиксаторов бегового полотна 1 в различные моменты времени.
Ось абсцисс расположена вдоль бегового полотна и направлена в ту же сторону что и вектор скорости бегового полотна со стороны рабочей зоны тренажера;
Ось ординат (для каждого момента времени Т) - направлена вверх, вдоль перпендикуляра к боковой проекции рабочей зоны тренажера.
Т0 - начальный момент времени, когда функция имитации препятствия не задействована;
Т0 - Tk - промежуток времени (зависящий от величины вектора скорости V), в течении которого имитируемая неровность местности «движется» вдоль бегового полотна за счет последовательного задействования пар возвратно-поступательных механизмов, соединенных опорно-соединительными роликами.
Количество задействованных в определенный момент времени опорно-соединительных роликов, формирующих в произвольный момент времени имитируемое препятствие 9, а также высоты на которые рабочие штоки 11 возвратно-поступательных механизмов поднимают (опускают) опорно-соединительные ролики с беговым полотном, на различных его участках (9 на фиг. 3) определяют конфигурацию (протяженность вдоль оси абсцисс на фиг. 3, угол крутизны и высоту препятствия - максимальную высоту hmax вдоль оси ординат на фиг 3). В следующий момент времени (T1 на фиг. 3) возвратно-поступательные механизмы, находящиеся на фиг. 3 слева от наивысшей точки имитируемого препятствия осуществляют «опускание» опорно-соединительных роликов с беговым полотном, при этом очередная пара возвратно-поступательных механизмов, находящаяся справа от нее, находящиеся на нулевой высоте относительно плоскости бегового полотна и не входившими в группу 9, поднимает его на соответствующую высоту, при этом, опорно-соединительный ролик, находившийся в высшей точке имитируемого препятствия начинает движение вниз, а следующий за ним поднимается на ту же высоту, за счет чего создается «эффект волны», формируемый последовательным движением рабочих штоков 11 возвратно-поступательных механизмов 2, с опорно-соединительными роликами 7 и беговым полотном 1 в вертикальной плоскости. Таким образом, в динамике, т.е. за некоторый временной интервал от Т0 до Tn создается имитация «движения» неровности местности в сторону, противоположную направлению вектора скорости атлета, задачей которого является его преодоление.
В целях исключения провисания или натяжения бегового полотна 1 при срабатывании очередной пары возвратно-поступательных механизмов 2, симметрично расположенных по разные стороны бегового полотна, оси вращения опорно-соединительных роликов 10 соединены с прижимными роликами-фиксаторами 3, расположенными симметрично относительно плоскости бегового полотна со стороны его рабочей зоны (фиг. 4), прижимая его к соответствующим опорно-соединительным роликам, за счет чего исключается возможность натяжения бегового полотна между высшей точкой препятствия и его основанием, обеспечивая плотное прилегание бегового полотна к опорно-соединительным роликам по всей длине рабочей зоны 8 тренажера. При выполнении упражнений на данном устройстве задается скорость движения бегового полотна и сложность маршрута, определяемая высотой и протяженностью имитируемых неровностей местности. В зависимости от них определяются скорость срабатывания, и величина хода рабочих штоков 11 возвратно-поступательных механизмов 2 (их выдвижения от 0-го значения вдоль оси ординат на фиг. 3). При этом механизм натяжения бегового полотна 4 в совокупности роликом-натяжителем 5, ослабляя натяжение бегового полотна компенсирует увеличение длины поверхности рабочей зоны 8 бегового полотна 1, возникающее вследствие того, что часть ленты полотна, длина которой конечна и постоянна, огибает имитируемые препятствия в рабочей зоне.
Таким образом, в процессе занятий на описанном тренажере тренирующийся вынужден преодолевать имитируемые неровности маршрута, что способствует формированию и закреплению навыков бега по пересеченной местности, а значит и к повышению эффективности тренировок беговых упражнений в соответствующей спортивной дисциплине за счет увеличения степени реалистичности условий выполнения упражнений при использовании для тренировок имитаций беговых трасс различных конфигураций (высота, угол наклона и протяженность имитируемых неровностей местности).
Кроме того, в целях дальнейшего повышения «эффекта присутствия» возможно оснащение данного устройства известными средствами визуализации маршрута движения, согласованного с конфигурацией имитируемой трассы - 3D-очки, мониторы, TV-панели, аудио системы и т.д., и т.п. Таким образом можно заключить, что совокупность приведенных технических решений в полной мере решает поставленную задачу заявляемого изобретения и обеспечивает достижение заявленного технического результата.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. RU 94011016, 1994 г.
2. RU 92 009 675, 1995 г.
3. RU 2 666 508, 2018 г.
4. RU 2 111 037, 1998 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беговой тренажер с интерфейсом виртуальной реальности | 2023 |
|
RU2813000C1 |
| ДОРОЖКА ДЛЯ БЕГА ГАЛОПОМ | 2017 |
|
RU2666508C1 |
| СПОСОБ ИМИТАЦИИ УЧАСТИЯ СПОРТСМЕНА БИАТЛОНИСТА ИЛИ ЛЫЖНИКА В СОРЕВНОВАНИЯХ ЛЮБОГО УРОВНЯ, В ТРЕНИРОВКАХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2689445C1 |
| ТРЕНАЖЕР ДЛЯ ГОРНОЛЫЖНИКОВ И СПОСОБ ТРЕНИРОВКИ НА НЕМ | 2020 |
|
RU2728086C1 |
| ТРЕНАЖЕР С "БЕГУЩЕЙ" ДОРОЖКОЙ ДЛЯ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2524912C1 |
| УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ ТРЕНИРОВОК И РЕАБИЛИТАЦИОННЫХ УПРАЖНЕНИЙ НА ЛЫЖАХ | 2002 |
|
RU2262372C2 |
| Беговая дорожка с адаптивной подстройкой скорости и угла наклона полотна | 2023 |
|
RU2804958C1 |
| БЕГОВОЙ ТРЕНАЖЁР С СИСТЕМОЙ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ И СПОСОБ ЕГО РАБОТЫ | 2019 |
|
RU2696754C1 |
| ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ МЕХАНИКОВ-ВОДИТЕЛЕЙ ПОДВИЖНЫХ КОМПЛЕКСОВ ВООРУЖЕНИЯ | 2019 |
|
RU2711047C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ ВЕЛОСИПЕДИСТОВ | 1998 |
|
RU2127624C1 |
Устройство для тренировки бега по пересеченной местности относится к физической культуре и спорту, а также к тренажерам, предназначенным для активных упражнений. Устройство для тренировки бега по пересеченной местности представляет собой размещаемое на раме-каркасе беговое полотно, приводимое в движение посредством вращающихся приводов, оснащенное роликом-натяжителем, снабженным соответствующим приводом натяжения бегового полотна, опирающееся вдоль всей рабочей зоны на опорно-соединительные ролики, торцы которых скреплены с размещаемыми с обеих сторон бегового полотна парами возвратно-поступательных механизмов, оснащаемых также элементами, прижимающими беговое полотно к соответствующим опорно-соединительным роликам, при этом данные механизмы поочередно перемещают опорно-соединительные ролики с беговым полотном в вертикальной плоскости, формируя таким образом группы роликов, которые в своей совокупности образуют неровность на беговом полотне, которая вследствие последовательного задействования (перемещения в вертикальной плоскости) последующих опорно-соединительных роликов и возвращения в исходное положение отработавших в процессе формирования неровности местности заданной конфигурации движется вдоль бегового полотна на тренирующегося, позволяя таким образом имитировать в процессе тренировок бег по местности со сложным рельефом. 4 ил.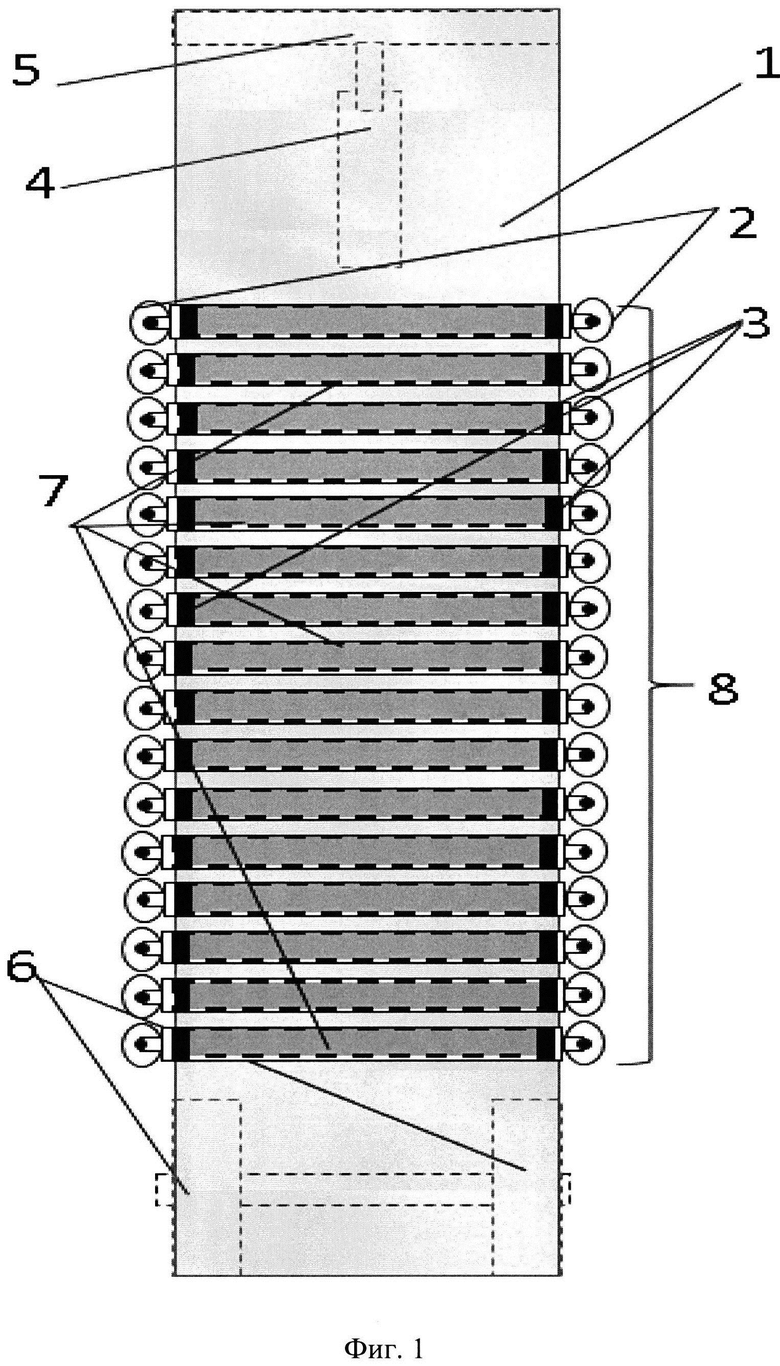
Устройство для тренировки бега по пересеченной местности, состоящее из размещаемого на раме-каркасе бегового полотна (1), приводов электродвигателя бегового полотна (6), ролика-натяжителя (5) и привода натяжения бегового полотна (4), отличающееся тем, что беговое полотно (1) вдоль всей рабочей поверхности (8) опирается на находящиеся под ним опорно-соединительные ролики (2), оси вращения (10) которых соединяют между собой симметрично расположенные относительно продольной оси бегового полотна (1) пары рабочих штоков (11) возвратно-поступательных механизмов (2) и соединенные с расположенными со стороны рабочей зоны (8) бегового полотна (1) прижимные ролики-фиксаторы бегового полотна (3).
| СПОСОБ ИМИТАЦИИ УЧАСТИЯ СПОРТСМЕНА БИАТЛОНИСТА ИЛИ ЛЫЖНИКА В СОРЕВНОВАНИЯХ ЛЮБОГО УРОВНЯ, В ТРЕНИРОВКАХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2689445C1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ШЛИФОВАНИЯ ОПОРНЫХ ПОВЕРХНОСТЕЙ ВИНТОРЕЗНЫХ ПЛАШЕК ТИПА ЛЕНДИС | 1932 |
|
SU38446A1 |
| БЕГОВОЙ ТРЕНАЖЁР С СИСТЕМОЙ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ И СПОСОБ ЕГО РАБОТЫ | 2019 |
|
RU2696754C1 |
| Лечебно-тренировочная барокамера | 1945 |
|
SU65770A1 |
| US 20170259155 A1, 14.09.2017 | |||
| US 6893382 B1, 17.05.2005 | |||
| CN 206315402 U, 11.07.2017 | |||
| US 4635928 A1, 13.01.1987. | |||

