Изобретение относится к космической технике, преимущественно к области создания высокоточных, трансформируемых космических антенн, например, космических радиотелескопов, и может быть использовано для подавления помех от колебаний упругой космической конструкции трансформируемой антенны, вызванных внешними и внутренними воздействующими факторами.
Одним из противоречивых требований, предъявляемых при создании космических радиотелескопов, является обеспечение их работы в широком диапазоне длин волн /от субмиллиметровых и миллиметровых до дециметровых и метровых длин волн/. В результате, с одной стороны, требуется обеспечить высокую геометрическую точность рабочей поверхности зеркала антенны /до 1/16-1/38 длины волны нижней границы диапазона субмиллиметровых и миллиметровых волн/, с другой - диаметр апертуры зеркала антенны должен быть не менее 10 длин волн верхней границы диапазона /дециметровые и метровые волны/. Для обеспечения выполнения указанных требований необходимо создание крупногабаритных /диаметр апертуры 5 и более метров/ трансформируемых высокоточных зеркальных антенн. В то же время такие конструкции из-за высоких требований к геометрической точности и больших размеров, приводящих к недостаточной жесткости, становятся гравитационно чувствительными системами, на основные характеристики которых оказывают влияние микродинамические воздействия. К основным возмущающим факторам в процессе эксплуатации относятся: гравитационные, космической среды и микродинамические возмущения, возникающие от работы систем космического аппарата /КА/ /А.П. Лебедев, В.И. Полежаев. Механика невесомости: микроускорения и гравитационная чувствительность процессов массообмена при получении материалов в космосе. /Успехи механики. Т. 13, вып. I, 1990, с. 4, 6, 7-15/. Крупногабаритные антенны представляют собой конструкции малой жесткости, раскрываемые на орбите. Поэтому при микродинамических воздействиях от внешних и внутренних возмущающих факторов под действием инерционных нагрузок и за счет сил упругости элементы конструкции антенны приходят в колебательное движение, которое неизбежно приводит к снижению геометрической точности рабочей поверхности антенны и, как следствие, к ухудшению радиотехнических характеристик /Б.А. Титов и др. Формирование динамических свойств упругих космических аппаратов. - М.: Машиностроение, 1995, с. 15-25/. Там же на с. 9 представлены структура канала связи и схема внесения помех от колебаний упругой конструкции КА, из которой видно, что помехи от упругости конструкции возникают как в процессе приема антенной полезного сигнала, так и на линии связи /радиолиния между КА и наземной приемно-регистрирующей системой/ в процессе передачи информации на Землю и приема команд с земли. Таким образом, задача подавления помех от упругости конструкции и ее юстировки в процессе эксплуатации является актуальной.
Известны способ виброизоляции и виброизолятор /Патент Российской Федерации 2091630, кл. F 16 F 15/06, 1995. Способ виброизоляции и виброизолятор/, в котором виброизолируемый объект устанавливают на платформу, связанную с основанием посредством подвески в виде шарнирно-рычажных механизмов, при этом подвеске обеспечивают шесть степеней свободы путем выполнения ее в виде шести независимых, шарнирно-рычажных механизмов /виброизоляторов/. Виброизоляторы размещают таким образом, что проекции на горизонтальную плоскость четырех шарнирно-рычажных механизмов лежат на сторонах квадрата, вписанного в горизонтальную проекцию платформы, проекция пятого шарнирно-рычажного механизма лежит на диагонали этого квадрата, а проекция шестого - перпендикулярно этой диагонали и заключена внутри квадрата.
Недостатками известного способа являются:
- односторонняя виброизоляция, т. е. от основания к платформе, а не в обоих направлениях;
- невозможность подавления упругих колебаний виброизолируемого объекта, возникающих от внешних возмущающих факторов, а не от основания, например упругих колебаний зеркала трансформируемой антенны, возникающих после его автоматического раскрытия, а также от аэродинамического сопротивления, действующего на раскрытое крупногабаритное зеркало в процессе космического полета и от возмущений, вызванных работой системы терморегулирования фокального блока /герметичного контейнера/ антенны и др.;
- невозможность проведения юстировки оптической оси антенны в процессе эксплуатации, заключающейся в определении пространственного положения фактической оптической оси антенны и нацеливании ее по звездным датчикам на объект, что потребовало бы проведения высокоточной /до десятых и сотых долей секунды/ переориентации всего КА, а такие переориентации панелей солнечных батарей и приемопередающей антенны и привело бы к усложнению процесса управления и дополнительному расходу энергии;
- более низкая точность управления подвеской по обратным связям вследствие отсутствия в контуре управления датчика относительной скорости, являющегося наблюдателем состояния /Куо Б. Теория и проектирование цифровых систем управления: Пер. с англ. - М.: Машиностроение, 1986. с. 409/.
Известен виброизолятор для реализации приведенного выше способа, содержащий платформу, шарнирно связанную с основанием шестью исполнительными органами в виде шарнирно-рычажных механизмов параллелограммного типа, блок управления, акселерометры, датчики относительного перемещения и усилители мощности, при этом в местах шарнирного соединения исполнительных органов с основанием установлена одна группа акселерометров, а другая - в местах их шарнирного соединения с платформой, каждый из исполнительных органов снабжен датчиком относительного перемещения, блок управления представляет собой микропроцессор, вход которого связан с акселерометрами и датчиками относительных перемещений платформы, а усилитель мощности подключен между микропроцессором и исполнительным органом. Причем исполнительный орган выполнен в виде самотормозящей червячной передачи.
Недостатками известного виброизолятора являются:
- недостаточная жесткость подвески для передачи загрузки от конструкции антенны на КА при выводе ее на заданную орбиту;
- значительное пространство полезного объема занимают шесть шарнирно-рычажных механизмов параллелограммного типа /проекции четырех на сторонах квадрата, проекция пятого - на его диагонали, а шестого - внутри квадрата перпендикулярно проекции пятого/, вследствие чего внутри пространства подвески практически невозможно разместить элементы конструкции антенны, например блок управления, систему раскрытия и др.
- низкая плавность хода /кинематическая чувствительность/ исполнительного органа, выполненного в виде червячной передачи, вследствие наличия в ней трения скольжения, причем в условиях космического вакуума;
- недостаточное быстродействие /так, быстродействие только лишь для прогнозирования в ускоренном времени для каждой из шести прогнозирующих моделей следящей системы должно составлять ее менее 680•103 операций в секунду: Красовский А.А. Основы теорий авиационных тренажеров.- М. Машиностроение. 1995, с. 240/ блока управления, выполненного в виде микропроцессора, связанного с датчиками и исполнительными органами, не позволяет обеспечить работу подвески в реальном масштабе времени, т.е. без запаздываний, в результате которых может возникнуть угроза встречного движения, когда из-за запаздывания платформа, с одной стороны, будет возвращаться назад, а от основания навстречу пойдет упругая волна и возникнет угроза удара, способного дестабилизировать КА и нарушить программу работы виброизолируемого объекта, например космического радиотелескопа;
- управление подвеской представляет собой замкнутую систему управления, что существенно сужает функциональные возможности самой подвески.
Техническим результатом изобретения является расширение функциональных возможностей системы пространственной виброизоляции в части подавления помех от колебаний упругой конструкции космической трансформируемой антенны в процессе эксплуатации и проведения юстировки оптической оси антенны, повышение жесткости подвески и плавности хода исполнительных органов и уменьшение занимаемого объема подвески, а также обеспечение возможности работы системы активной пространственной виброизоляции в режиме реального времени.
Это достигается тем, что в способе подавления помех от колебаний упругой конструкции космической трансформируемой антенны в процессе эксплуатации, заключающемся в том, что относительно основания космического аппарата обеспечивают пространственную виброизоляцию кинематически связанной с ним платформы с установленным на ней объектом защиты по шести степеням свободы, при которой обеспечивают неизменное положение платформы в инерциальном пространстве, а управление платформой осуществляют согласованной работой модулей активной виброизоляции от акселерометров, которые устанавливают на основании и платформе в местах их шарнирного соединения, а также датчиков относительных перемещений, с помощью которых определяют относительное перемещение платформы, предварительно на рабочей поверхности конструкции антенны и ее элементах располагают контрольные марки системы контроля геометрии и в непосредственной близости от них на нерабочей поверхности устанавливают акселерометры, а на опорной системе вблизи фокуса антенны устанавливают звездные датчики, которые ориентируют относительно базовые системы координат антенны и космического аппарата, затем осуществляют физическое моделирование динамики автоматического раскрытия антенны или ее фрагментов, при котором выявляют амплитуды и частоты колебаний, требующих подавления, а также амплитуды и частоты колебаний, генерируемых платформой, с помощью которых активизируют подавление резонансных колебаний раскрытой антенны до обеспечения требуемой геометрической точности конструкции антенны, затем осуществляют физическое моделирование колебаний конструкции антенны от микродинамических воздействий, вызванных работой систем космического аппарата в процессе эксплуатации и одновременно регистрируют спектр микродинамических воздействий и спектр основных геометрических и, как следствие, радиотехнических параметров в контрольных точках на рабочей поверхности конструкции антенны, затем производят оценку их взаимного влияния и устанавливают амплитуды и частоты колебаний, требующих демпфирования, после чего осуществляют физическое моделирование спектра микродинамических воздействий, вызванных внешними факторами, и аналогично устанавливают амплитуды и частоты колебаний, требующих подавления, затем одновременно с указанным спектром микродинамических воздействий генерируют платформой спектр динамических воздействий в месте стыковки с ней конструкции антенны, производят оценку их взаимного влияния и устанавливают амплитуды и частоты динамических воздействий, подавляющих колебания, вызванные внешними факторами, при этом физическое моделирование осуществляют с компенсацией влияния силы тяжести и воздушной среды, после этого по полученным данным производят настройку пространственной системы подавления помех от колебаний упругой конструкции космической трансформируемой антенны, с помощью которой осуществляют выбор одного из следующих режимов или их комбинации управления динамикой конструкции антенны:
- виброизоляция космического аппарата при раскрытии конструкции антенны, управление которой осуществляют единичными модулями активной виброизоляции по показаниям акселерометров, которые устанавливают на основании и платформе в местах их шарнирного соединения с единичными модулями активной виброизоляции, а также по показаниям датчиков относительных перемещений и датчиков относительных скоростей, которые устанавливают на каждом единичном модуле активной виброизоляции;
- подавление колебаний конструкции антенны, вызванных раскрытием антенны и внешними факторами, управление которыми осуществляют единичными модулями активной виброизоляции по показаниям акселерометров, которые устанавливают на конструкции антенны, основании и платформе, а также по показаниям датчиков относительных перемещений и датчиков относительных скоростей, которые устанавливают на каждом из единичных модулей активной виброизоляции;
- виброизоляция конструкции антенны от микродинамических воздействий, вызванных работой систем космического аппарата в процессе эксплуатации, управление которой осуществляют единичными модулями активной виброизоляции по показаниям акселерометров, которые устанавливают на основании и платформе в местах их шарнирного соединения с единичными модулями активной виброизоляции, а также по показаниям датчиков относительных перемещений и датчиков относительных скоростей, которые устанавливают на каждом из единичных модулей активной виброизоляции;
- определение отклонения диаграммы направленности антенны от внешних и внутренних воздействующих факторов и ее юстировку осуществляют системой контроля геометрии и единичными модулями активной виброизоляции по показаниям датчиков относительных перемещений, которые устанавливают на каждом из единичных модулей активной виброизоляции, и звездных датчиков, которые устанавливают вблизи от фокуса антенны, при этом обрабатывают векторную информацию от датчиков и системы контроля геометрии, формируют управляющие команды в реальном масштабе времени и подают их на исполнительные органы, а информацию от датчиков и систем преобразуют в радиосигналы и по радиолинии передают в приемно-регистрирующую систему.
Это достигается тем, что в устройстве подавления помех от колебаний упругой конструкции космической трансформируемой антенны в процессе эксплуатации, содержащем основание и платформу, шарнирно связанные между собой посредством подвески в виде модулей активной виброизоляции, и блок управления, состоящий из управляющего микропроцессора, акселерометров, установленных на шарнирных концах модулей активной виброизоляции, датчиков относительного перемещения и исполнительных органов, подвеска выполнена в виде манипулятора, включающего не менее шести модулей одинакового конструктивного исполнения и построенного на основе параллельно соединенных приводных кинематических цепей с возможностью образования пространственной фермы между основанием и платформой при отключенных исполнительных органах единичных модулей активной виброизоляции, являющихся стержнями фермы и выполненных в виде самотормозящихся шариковинтовых механизмов со сферическими опорами для связи их соответственно с основанием и платформой, а блок управления выполнен в виде бортовой информационно-технологической системы контроля и управления открытого типа с программно-алгоритмическим обеспечением параллельной обработки данных, организованной на базе нейропроцессоров и средств формирования и использования базы знаний, при этом входы информационно-технологической системы контроля и управления через шины данных аналого-цифровых преобразователей подключены к выходам аналого-цифровых преобразователей акселерометров, датчиков относительных перемещений, датчиков относительной скорости, звездных датчиков и системы контроля геометрии, а выходы бортовой информационно-технологической системы контроля и управления через шину выходных данных подключены соответственно ко входам последовательно соединенных усилителей мощности и исполнительных органов и ко входу соединенных последовательно бортовой радиотелеметрической системы, радиолинии и наземной приемно-регистрирующей системы. Причем привод линейных перемещений единичного модуля, как вариант исполнения, может быть выполнен пьезоэлектрическим или магнитострикционным.
На чертежах приведено схематическое изображение устройства, реализующего предложенный способ.
На фиг. 1 изображена конструкция трансформируемой антенны космического радиотелескопа в составе КА.
На фиг. 2 представлена кинематическая схема фрагмента подвески с единичным модулем активной виброизоляции.
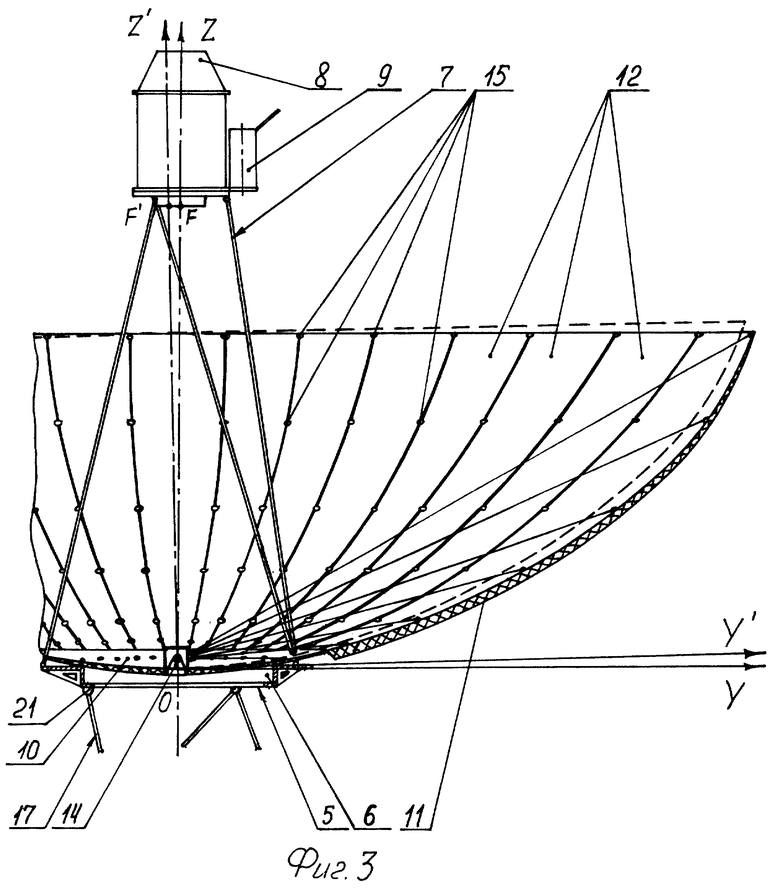
На фиг. 3 показана трансформируемая конструкция антенны с системой контроля геометрии.
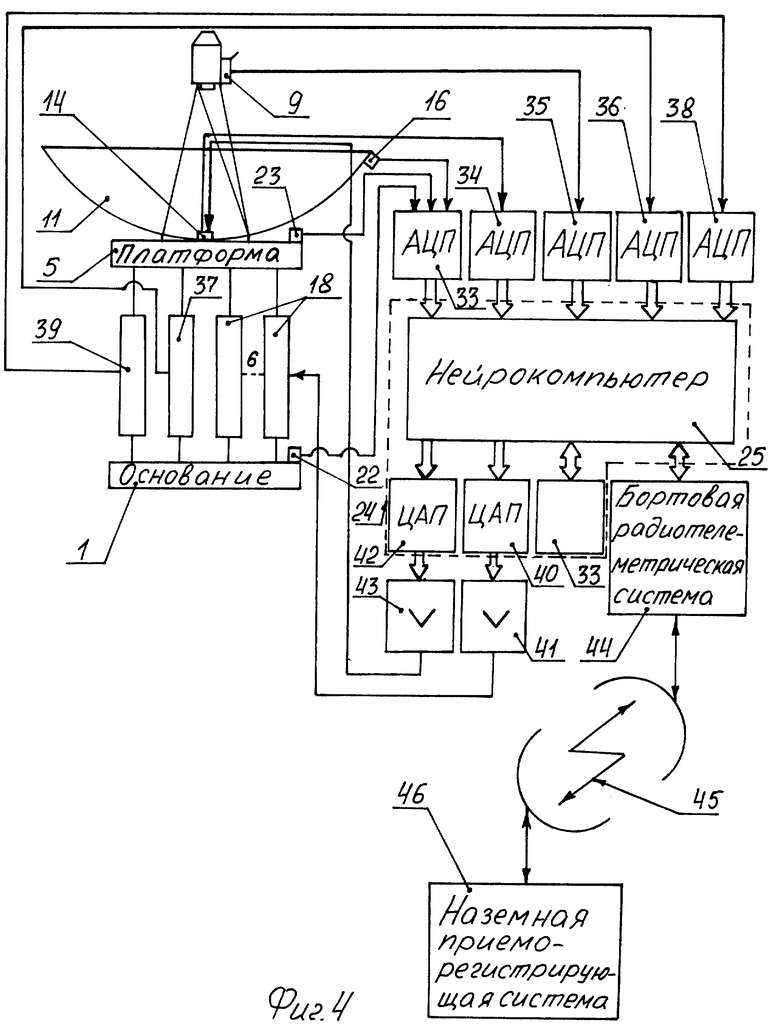
На фиг. 4 представлена структурная схема устройства подавления помех от колебаний упругой конструкции космической трансформируемой антенны.
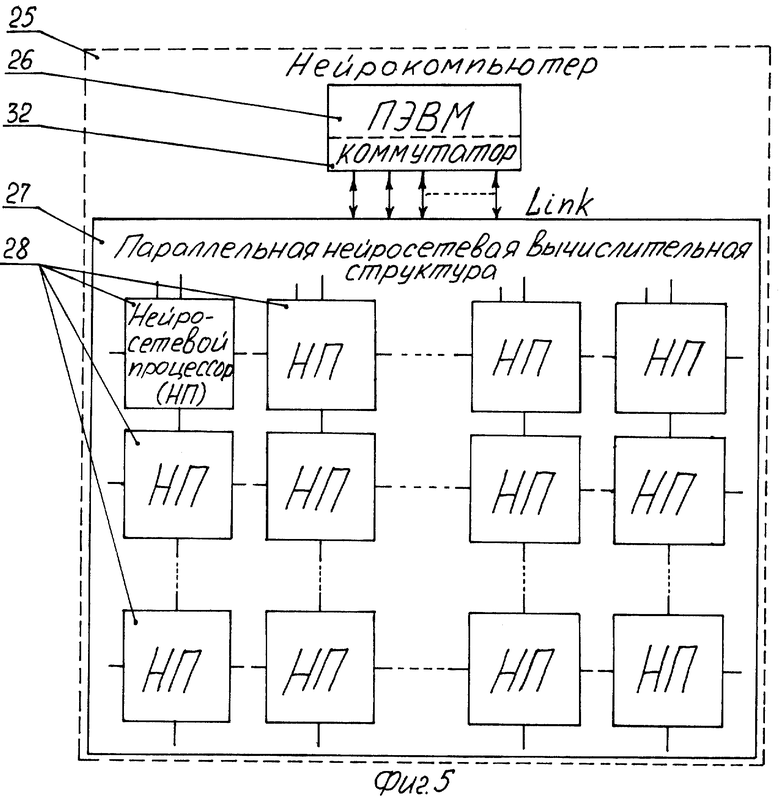
На фиг.5 изображена архитектура цифрового нейрокомпьютера /НК/.
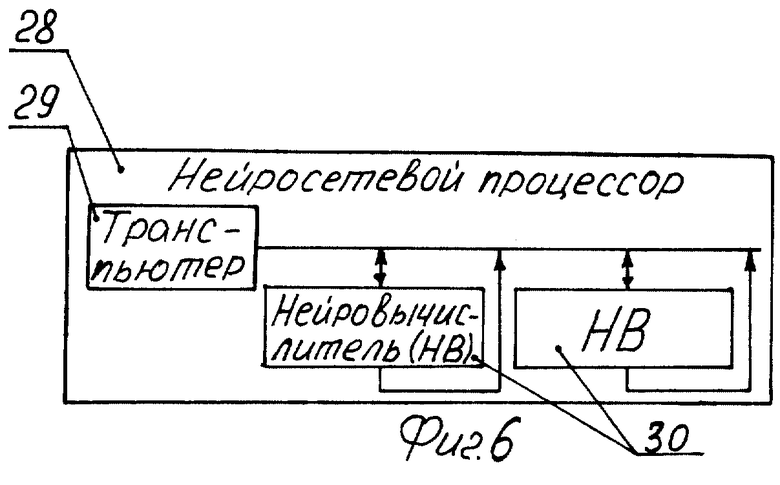
На фиг.6 показана архитектура нейросетевого процессора /НП/.
На фиг.7 изображена архитектура нейровычислителя /НВ/.
На фиг. 8 показана архитектура виртуальных нейропроцессоров /ВНП/.
Устройство включает в себя основание 1, установленное на несущей конструкции приборного контейнера 2 КА с панелями солнечных батарей 3 и приемопередающей антенной 4, шарнирно связанную с ним платформу 5 с трансформируемой космической антенной, выполненной в виде ступицы 6 с установленными на ней опорной системой 7 с фокальным блоком 8 и оптическими звездными датчиками /ОЗД/ 9, центральным зеркалом 10 и трансформируемым зеркалом 11 в виде жестких лепестков 12, шарнирно связанных со ступицей 6 посредством механизма раскрытия /на чертежах не показан/, при этом на конструкции трансформируемой антенны установлены малонаправленные антенны 13 и система контроля геометрии, выполненная в виде сканирующего устройства 14 и размещенных в контрольных точках на рабочей поверхности антенны контрольных марок 15, причем в местах установки марок 15 на нерабочей поверхности антенны установлены трехосные блоки акселерометров 16. Основание 1 шарнирно связано с платформой 5 посредством подвески с шестью степенями свободы, выполненной в виде манипулятора, включающего не менее шести единичных модулей активной виброизоляции 17 одинакового конструктивного исполнения и построенного на основе параллельно соединенных приводных кинематических цепей с возможностью образования пространственной фермы при отключенных исполнительных органах единичных модулей активной виброизоляции 17, являющихся стержнями фермы. Каждый из единичных модулей активной виброизоляции 17 выполнен в виде самотормозящегося шариковинтового механизма, включающего электропривод 18 с установленной на выходном валу шариковой гайкой 19, кинематически связанной с ходовым винтом 20, при этом электропривод 18 и стержень с ходовым винтом 20 связаны с основанием 1 и платформой 5 попарно шарнирными узлами 21, обеспечивающими подвеске совместно с шариковинтовыми механизмами шесть степеней свободы. В местах шарнирного закрепления каждого из единичных модулей активной виброизоляции 17 к основанию 1 установлен трехосный блок акселерометров 22, а в месте соединения с платформой 5 - трехосный блок акселерометров 23. Акселерометры 22 и 23 установлены в шарнирных узлах 21 таким образом, что измеряют составляющие ускорений, действующих на продольные оси единичных модулей активной виброизоляции 17. Блок управления выполнен в виде бортовой информационно-технологической системы контроля и управления /БИТС КУ/ 24, включающей нейрокомпьютер 25, состоящий из управляющей ПЭВМ 26, параллельного процессора нейрообработки /ППН/, представляющего собой параллельную нейросетевую вычислительную структуру /ПНВС/ 27 с решающим полем узловых нейропроцессоров 28, блок питания и систему охлаждения /на чертежах не показаны/. Каждый из нейропроцессоров 28 представляет собой транспьютерный канал связи 29 с нейровычислителями 30. Нейропроцессор 28 позволяет организовать параллельную работу виртуальных нейропроцессоров 31. ПЭВМ 26 через транспьютерную плату с выведенными на разъемы входными/выходными контактами LinK коммутатора 32 каналов подключается непосредственно к нейропроцессорам 28. При этом программное обеспечение нейрокомпьютера 25 содержит два уровня средств:
стандартное общесистемное транспьютерное программное обеспечение;
специально разработанные системные, тестовые и функциональные программные средства.
Входы БИТС КУ 24 через шины данных аналого-цифровых преобразователей /АЦП/ подключены соответственно к выходам АЦП 33 акселерометров 16, 22, 23; АЦП 34 сканирующего устройства 14 системы контроля геометрии; АЦП 36 оптических звездных датчиков 9; АЦП 36 датчиков относительной скорости 37; АЦП 38 датчиков относительного перемещения 39, а выходы БИТС КУ 24 через шины выходных данных подключены к соответствующим входам последовательно соединенных цифроаналоговых преобразователей /ЦАП/ 40, усилителей мощности 41 и исполнительных органов подвески /электроприводам 18 единичных модулей активной виброизоляции 17/, цифроаналоговых преобразователей 42, усилителей мощности 43 и исполнительных органов сканирующего устройства 14 системы контроля геометрии и ко входу соединенных последовательно бортовой радиотелеметрической системы /БРТС/ 44, радиолинии 45 и наземной приемно-регистрирующей системы /НПРС/ 46.
Способ подавления помех от колебаний упругой конструкции космической трансформируемой антенны в процессе эксплуатации реализован следующим образом.
Трансформируемую антенну, например, космического радиотелескопа устанавливают на платформе 5, связанной с основанием 1 несущей конструкции приборного контейнера 2 КА посредством подвески в виде не менее шести независимых единичных модулей активной виброизоляции 17, концы которых попарно с помощью шарнирных узлов 21 связывают соответственно с основанием 1 и платформой 5 таким образом, что образуется пространственная кольцевая ферма, выполняющая одновременно функции переходной фермы между КА и трансформируемой антенной /полезной нагрузкой/ и способная выдерживать стартовые нагрузки при выведении трансформируемой антенны на заданную орбиту. В то же время согласованным изменением длин единичных модулей активной виброизоляции 17 обеспечивают платформе 5 в заданных пределах шесть степеней свободы относительно основания 1. При этом упругие свойства единичных модулей 17, выполненных в виде шариковинтовых механизмов, а также соединение /при необходимости/ шарнирных узлов 21 с основанием 1 или платформой 5 через упругие элементы /на чертежах не показаны/ позволяют обеспечить фильтрацию высокочастотных упругих колебаний. Предварительно в наземных условиях производят физическое моделирование динамики автоматического раскрытия антенны или ее фрагментов и определяют амплитуды и частоты упругих колебаний антенны, возникающих после ее раскрытия и фиксации, влияющие на динамику КА /его стабильность/ и требующие их подавления. Так, например, после автоматического раскрытия космических антенн диаметром около 5 метров спутников связи под действием пружинных механизмов время стабилизации КА достигает в отдельных случаях нескольких суток. Кроме того, потребность в размещении на периферии трансформируемого зеркала 11 малонаправленных антенн 13, представляющих собой сосредоточенные массы, снижает частоту собственных колебаний как лепестков 12, так и самого трансформируемого зеркала 11. После этого осуществляют физическое моделирование спектра микродинамических воздействий, вызванных внешними факторами /аэродинамическое сопротивление космической среды, работа системы терморегулирования фокального блока 8 и др./, и определяют с помощью системы контроля геометрии и акселерометров 16, установленных на нерабочей поверхности конструкции антенны в непосредственной близости от контрольных марок 15, амплитуды и частоты колебаний конструкции антенны, требующие подавления, причем определение отклонения пространственного положения контрольных марок 15 от теоретического осуществляют сканирующим устройством 14, расположенным в вершине параболического зеркала трансформируемой антенны 11 с возможностью совершать качательные движения по углу места и вращательное по азимуту /относительно оси, совпадающей с оптической осью антенны OZ/. Затем по результатам физического моделирования определяют амплитуды и частоты упругих колебаний, генерируемых самой подвеской, управляемой от БИТС КУ 24, которые при распространении по конструкции антенны способны подавлять резонансные упругие колебания самой трансформируемой антенны, вызванные как динамикой раскрытия самой трансформируемой антенны, так и внешними бездействующими факторами /аэродинамическое сопротивление космической среды, работа системы терморегулирования фокального блока 8 и др./. Пример подавления резонансных колебаний механизмов предложен в "Способе подавления резонансных колебаний механизма" /А. С. СССР N 1649168, F 16 F 15/00 от 25.01.88/, в котором предлагается соответствующим образом изменять или жесткостный, или инерционный параметр с частотой, превышающей частоту внешнего вибрационного воздействия при определенном значении амплитуды. При этом контроль ускорений на основании, платформе и конструкции трансформируемой антенны осуществляют соответственно акселерометрами 22, 23 и 16, а контроль отклонения геометрических параметров антенны от теоретических при упругих колебаниях осуществляют с помощью системы контроля геометрии путем сканирования контрольных марок 15, расположенных на рабочей поверхности конструкции антенны, сканирующим устройством 14. Затем осуществляют физическое моделирование упругих колебаний раскрытой конструкции антенны или ее фрагментов, вызванных микродинамическими воздействиями от работы систем КА в процессе эксплуатации /работа системы терморегулирования приборного контейнера 2, приводов ориентации панелей солнечных батарей 3 и приемно-передающей антенны 4, а также системы ориентации самого КА и др./. При этом контролируют и регистрируют спектр микродинамических воздействий акселерометрами 23, установленными на платформе 5, и спектр изменения геометрических параметров антенны с помощью системы контроля геометрии. Устанавливают их взаимосвязь и определяют амплитуды и частоты упругих колебаний конструкции антенны, требующих подавления. При этом физическое моделирование осуществляют с компенсацией влияния силы тяжести и воздушной среды. После этого, по полученным в результате анализа оценкам влияния спектра микродинамических воздействий на спектр отклонений геометрических параметров трансформируемой антенны в раскрытом положении от теоретических производят настройку пространственной системы подавления помех от колебаний упругой конструкции космической антенны, с помощью которой осуществляют выбор одного из следующих режимов или их комбинаций управления динамикой конструкции антенны:
1-й режим - виброизоляция КА при раскрытии конструкций антенны, управление которой осуществляют единичными модулями активной виброизоляции 17 путем согласованного изменения их длин по командам от БИТС КУ 24, формируемым по показаниям акселерометров 22 и 23, установленных соответственно на основании 1 и платформе 5 в местах их шарнирного соединения с единичными модулями активной виброизоляции, а также по показаниям датчиков относительных перемещений 39 и датчиков относительных скоростей 37, которые устанавливают на каждом единичном модуле активной виброизоляции 17;
2-й режим - подавление колебаний конструкции антенны, вызванных раскрытием антенны и внешними факторами, управление которыми осуществляют единичными модулями активной виброизоляции 17 путем согласованного изменения их длин по командам от БИТС КУ 24, формируемым по показаниям акселерометров 16, которые устанавливают на конструкции антенны, а также акселерометров 22, 23, установленных соответственно на основании 1 и платформе 5, и по показаниям датчиков относительных перемещений 39 и датчиков относительных скоростей 37, которые устанавливают на каждом из единичных модулей активной виброизоляции 17;
3-й режим - виброизоляция конструкции антенны от микродинамических воздействий, вызванных работой систем КА в процессе эксплуатации, управление которой осуществляют единичными модулями активной виброизоляции 17 путем согласованного изменения их длин по командам от БИТС КУ 24, формируемым по показаниям акселерометров 22 и 23, установленных соответственно на основании 1 и платформе 6 в местах их шарнирного соединения с единичными модулями активной виброизоляции 17, а также по показаниям датчиков относительных перемещений 39 и датчиков относительных скоростей 37, которые устанавливают на каждом из единичных модулей активной виброизоляции 17;
4-й режим - определение отклонения оптической оси антенны OZ, характеризующей диаграмму направленности антенны, от внешних и внутренних бездействующих факторов и ее юстировку осуществляют системой контроля геометрии и единичными модулями активной виброизоляции 17 путем сканирования сканирующим устройством 14 контрольных марок 15 и согласованным изменением длин единичных модулей активной виброизоляции 17 по командам от БИТС КУ 24, формируемым по показаниям датчиков относительных перемещений 39, которые устанавливают на каждом из единичных модулей активной виброизоляции 17, и оптических звездных датчиков 9, устанавливаемых вблизи от фокуса антенны F.
При этом обрабатывают векторную информацию от датчиков и системы контроля геометрии, формируют в БИТС КУ 24 управляющие команды в режиме реального времени и подают их на исполнительные органы, а обработанную информацию от датчиков и систем преобразуют в радиосигналы, через бортовую радиотелеметрическую систему 44 по радиолинии 45 передают в наземную приемно-регистрирующую систему 46 для дальнейшей обработки, анализа и формирования при необходимости управляющих команд и передачи их на КА для проведения корректировки программы наблюдений.
Устройство для осуществления предложенного способа подавления помех от колебаний упругой конструкции космической трансформируемой антенны в процессе эксплуатации работает следующим образом.
Акселерометры 23 и 22 измеряют виброускорения соответственно платформы 5 и основания 1 в местах установки шарнирных узлов 21 вдоль осей единичных модулей активной виброизоляции 17, а датчики относительного перемещения 39 и датчики относительной скорости 37 /наблюдатели состоянии/ регистрируют их относительные перемещения и скорости. Акселерометры 16 измеряют виброускорения в контрольных точках на конструкции трансформируемой антенны в непосредственной близости от контрольных марок 15 системы контроля геометрии, расположенных на рабочей поверхности и контролируемых сканирующим устройством 14 в процессе эксплуатации. На фокальном блоке 8 в непосредственной близости от фокуса зеркала антенны F размещены оптические звездные датчики 9, оптические оси которых выставлены параллельно оптической оси зеркала антенны OZ. Работа устройства в каждом из приведенных выше режимов осуществляется следующим образом.
1-й режим - виброизоляция КА при раскрытии антенны. Здесь от акселерометров 22 и датчиков относительного перемещения 39 и относительной скорости 37 БИТС КУ 24 осуществляет управление по обратным связям /основной алгоритм управления/, а от акселерометров 23 на это основное управление накладывается дополнительный сигнал управления, который называется инвариантным. Суть его состоит в том, что он делает ускорения, измеряемые акселерометрами 22, равными нулю, т. е. как бы основание 1 становится неподвижным в инерциальном пространстве /это утверждение справедливо только для области низких частот, которую пропускает сервопривод в виде электродвигателя с шариковинтовой передачей/. В то же время, если на платформе 5 зафиксированы большие ускорения, то относительное положение шарнирных узлов 21 может выйти за допустимые пределы перемещений. Для предотвращения этой ситуации, когда перемещение достигло предельно допустимой величины, включается другой алгоритм управления, заключающийся в следующем. Сигналы от акселерометров 23 отключаются и система управляется по обратным связям от акселерометров 22 и датчиков относительных перемещений 39. Это происходит до тех пор, пока относительные перемещения не достигнут величин, меньших, чем предельно допустимая, упомянутая выше, после чего включается основной алгоритм управления.
В 3-ем режиме, когда, наоборот, осуществляется виброизоляция конструкции антенны от микродинамических воздействий, вызванных работой систем КА /система терморегулирования приборного контейнера 2, приводы ориентации панелей солнечных батарей 3 и приемопередающей антенны 4, а также система ориентации самого КА и др./, управление осуществляется аналогично, с той лишь разницей, что акселерометры 22 и 23 меняются в управлении ролями, т.е. управление по обратным связям ведется от акселерометров 22 и датчиков относительных перемещений 39 и относительной скорости 37.
Во 2-ом режиме осуществляется подавление колебаний конструкции антенны, вызванных раскрытием антенны и внешними факторами /работа системы терморегулирования фокального блока 8, аэродинамическое сопротивление космической среды и др. /. Здесь в контур управления по обратным связям помимо акселерометров 22, 23 и датчиков относительной скорости 37 и относительного перемещения 33 дополнительно включены акселерометры 16, предельно допустимые значения показаний которых /с точки зрения обеспечения требуемой геометрической точности антенны/ были определены, как было описано ваше, при физическом моделировании, когда устанавливается связь между показаниями акселерометров 16 и изменением геометрических параметров антенны, определяемых в процессе воздействия внешних факторов с помощью системы контроля геометрии в виде сканирующего устройства 14 и контрольных марок 15, установленных на конструкции антенны.
В 4-ом режиме осуществляется периодический контроль геометрии антенны системой контроля геометрии путем сканирования устройством 14 контрольных марок 15, расположенных в контрольных точках на конструкции антенны, и в случае отклонения рабочей поверхности зеркала антенны от теоретической выше допустимого значения, вызванного, например, термодеформациями или технологическими погрешностями трансформируемого зеркала 11 после его раскрытия, БИТС КУ 24 определяет геометрические параметры зеркала и положение фактической оптической оси OZ', полученного нового /фактического/ параболоида зеркала антенны и подает команды на исполнительные органы /электроприводы 18/ единичных модулей активной виброизоляции 17. В результате согласованного изменения их длин, регистрируемых датчиками относительных перемещений 39 и рассчитанных с учетом показаний оптических звездных датчиков 9, осуществляется юстировка /наведение/ фактической оптической оси зеркала антенны OZ' на наблюдаемый объект.
Во всех приведенных режимах сигналы от датчиков поступают через соответствующие АЦП в цифровом виде в БИТС КУ 24, в которой с помощью нейрокомпьютера 25 и программно-алгоритмического обеспечения 33 осуществляется обработка поступающей информации и формирование управляющих команд в реальном режиме времени, которые через соответствующие ЦАП и усилители мощности поступают на исполнительные органы единичных модулей активной виброизоляции 17 и устройство сканирования 14, а также через шину выходных данных предварительно обработанные и сжатые /компрессированные/ потоки информации через бортовую радиотелеметрическую систему 44 и радиолинию 45 поступают в наземную приемно-регистрирующую систему 46, в которой операторами-исследователями производится их дальнейшая обработка, анализ полученных результатов и при необходимости корректируется программа проведения наблюдений за объектами исследований, которая через радиолинию 45 и бортовую радиотелеметрическую систему 44 передается в БИТС КУ 24 для выполнения.
Приведенные способ и устройство могут быть реализованы на базе имеющихся на сегодняшний день разработок и функционирующих устройств.
Так, известны устройства, в которых реализован пространственный механизм в части кинематической схемы, но с гидравлическими приводами /А.Ф. Крайнев. Словарь-справочник по механизмам. - 2-е изд., перераб. и доп. - М.: Машиностроение, 1987, с. 337-338 - "Приводное шестиподвижное кинематическое соединение" и А.А. Красовский. Основы теории авиационных тренажеров. - М.: Машиностроение, 1995, с. 232-240/. Положение твердого тела в пространстве относительно какой-либо системы координат, как известно, определяется шестью числами. В предлагаемой подвеске в качестве таких чисел используются длины шести единичных модулей активной виброизоляции 17, соединяющих платформу 5 с основанием 1 таким образом, что при заданных значениях длин шести единичных модулей активной виброизоляции 17 образуется геометрически неизменяемая структура, причем движение такой системы в отличие от общепринятых уравнений движения свободного твердого тела с использованием углов Эйлера описывается только в линейных величинах /А.Ш. Колискор. Разработка и исследование промышленных роботов на основе 1-координат. - Станки и инструмент, 1982, N 12, с. 21-24/.
В качестве исполнительных органов единичных модулей активной виброизоляции 17 применен шариковинтовой механизм, представляющий закрепленный на одном конце электропривод 18, на выходном валу которого установлена шариковая гайка 19 с шарикоперепускным каналом /на фиг.2 не показан/, кинематически связанная с ходовым винтом 20 и образующая с ним самотормозящуюся пару. При вращении шариковой гайки 19 происходит линейное /осевое/ перемещение ходового винта 20 и соответственно изменение длины единичного модуля активной виброизоляции 17. Применение шариковинтовых механизмов в передачах, преобразующих вращательное движение в поступательное, позволяет кроме повышения КПД механизма до 90% получить ряд других преимуществ перед обычными винтовыми механизмами:
1 - низкий коэффициент трения покоя и, следовательно, высокую кинематическую чувствительность;
2 - минимальный износ;
3 - высокую точность и равномерность поступательного движения с сохранением этих параметров в процессе эксплуатации;
4 - возможность полного исключения осевого люфта без значительного снижения КПД механизма;
6 - надежную работу как в диапазоне от 60 до 500oC, так и в агрессивной среде и вакууме, что очень важно для механизмов, работающих в открытом космосе. /Б.И. Павлов. Шарико-винтовые механизмы в приборостроении, Л. Машиностроение. 1968, с.4/.
Примеры применения шариковинтовых механизмов в авиации приведены в работе В.Н. Кастельмана и А.В. Федорова "Механизмы управления самолетом." - М.: Машиностроение, 1987.
В качестве нейрокомпьютера 26, позволяющего БИТС КУ 24 осуществлять контроль и управление пространственной системой подавления помех от упругих колебаний конструкции трансформируемой антенны в реальном масштабе времени, может быть применен отечественный нейрокомпьютер серии "Геркулес", выполненный на стандартной элементной базе. Нейрокомпьютер серии "Геркулес" относится к отечественным высокопроизводительным цифровым нейрокомпьютерам /разработка КТТУ им. А.Н. Туполева /г. Казань/ и НЦН РАН /г. Москва/ специального и общего назначения и позволяет обеспечить реализацию супервычислений в режиме реального времени /Кирсанов Э.Ю. Опытные образцы отечественных нейрокомпьютеров серии "Геркулес" на стандартной базе.// Нейрокомпьютер, - 1997- N 1, 2, с. 49-55/.
Примеры реализации систем контроля геометрии зеркальных антенн, представляющих, как правило, сканирующее устройство, размещенное в вершине параболического зеркала и оптически взаимодействующее с расположенными в контрольных точках на рабочей поверхности зеркала контрольными марками /оптическими отражателями/, различного конструктивного исполнения приведены в кн.: B.C. Поляк, Э.Я. Бервалдс. Прецизионные конструкции зеркальных радиотелескопов: Опыт создания, проблемы анализа и синтеза. - Рига: Зинатне, 1990, с. 146-149 /рис. 3.59, 3.62/.
Предлагаемые способ подавления помех от колебаний упругой конструкции космической трансформируемой антенны и устройство для его осуществления позволяют повысить эффективность использования за счет увеличения функциональных возможностей пространственной системы виброизоляции. При этом пространственная система виброизоляции способна выполнять функции несущей переходной фермы между КА и полезной нагрузкой /трансформируемая антенна космического радиотелескопа/ при выведении ее на заданную орбиту и в процессе эксплуатации, занимая минимальное рабочее пространство полезного объема под обтекателем ракеты-носителя, гасить колебания, распространяемые как в направлении от основания к платформе, так и от платформы к основанию, а также генерировать низкочастотные колебания в обоих направлениях и осуществлять контроль геометрии и юстировку антенны в процессе эксплуатации в режиме реального времени.

Изобретение относится к космической технике и может быть использовано в крупногабаритных высокоточных трансформируемых конструкциях, например, зеркальных антенных космических радиотелескопов. Согласно изобретению подавление помех, вызванных упругими колебаниями конструкции, осуществляют с помощью виброизолирующей платформы в виде пространственной фермы. Ферма образована шарнирными связями стыковочной поверхности космического аппарата и платформы с виброизолируемым объектом. При этом связи осуществлены единичными модулями активной виброизоляции, способными согласованно изменять свою длину по команде от блока управления и датчиков относительных перемещения и скорости. Эти модули выполнены в виде самотормозящихся шариковинтовых механизмов, дающих геометрическую неизменяемость системы при отключенных приводах. На базе физического моделирования колебательного процесса устанавливают тот или иной режим управления динамикой конструкции антенны. Изобретение направлено на расширение функциональных возможностей системы пространственной виброизоляции и повышение точности космических трансформируемых антенн в процессе их эксплуатации. 2 с и 2 з.п.ф-лы, 8 ил.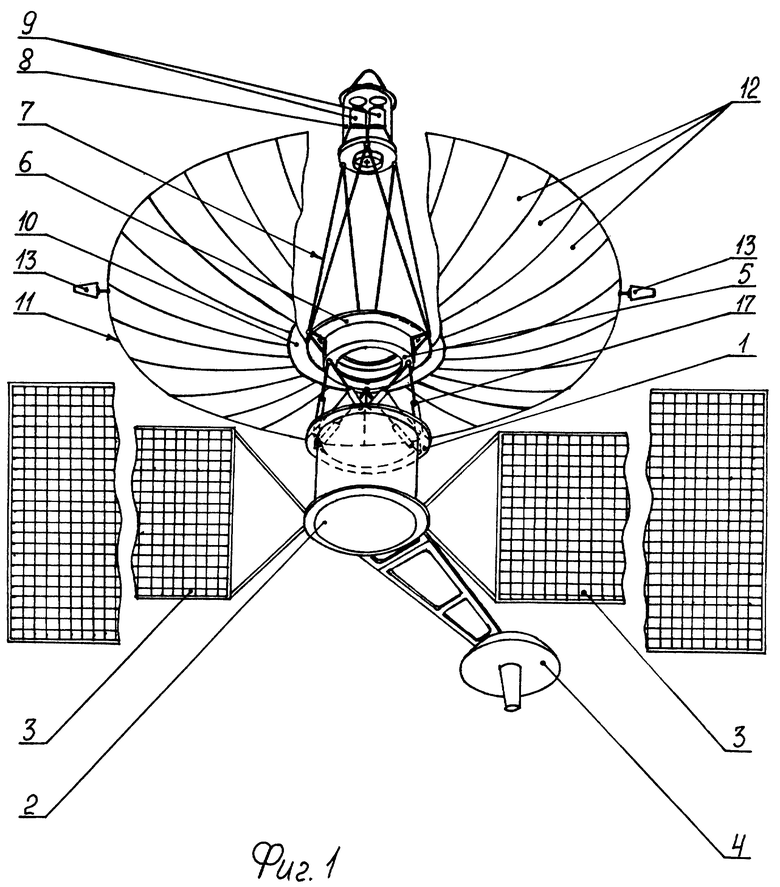
| СПОСОБ ВИБРОИЗОЛЯЦИИ И ВИБРОИЗОЛЯТОР | 1995 |
|
RU2091630C1 |
| КРАСОВСКИЙ А.А | |||
| Основы теории авиационных тренажеров | |||
| - М.: Машиностроение, 1995, с.240 | |||
| КРАЙНЕВ А.Ф | |||
| Словарь-справочник по механизмам | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| - М.: Машиностроение, 1987, с.337-338 | |||
| КИРСАНОВ Э.Ю | |||
| Опытные образцы отечественных нейрокомпьютеров серии "Геркулес" на стандартной базе | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| - М., 1997, с.49-55 | |||
| ПОЛЯК В.С., БЕРВАЛДС Э.Я | |||
| Прецизионные конструкции зеркальных радиотелескопов | |||
| Опыт создания, проблемы анализа и синтеза | |||
| - Рига: Зинатне, 1990, с.146-149. | |||

