Изобретение относится к области авиационного приборостроения, в частности к комплексам навигации летательных аппаратов (ЛА).
В наиболее близком аналоге [И.Н. Белоглазов, Г.И. Джанджгава, Г.П. Чигин. Основы навигации по физическим полям, Москва, «Наука», Главная редакция физико-математической литературы, 1985 г., стр.28-29] представлена Комплексная инфракрасная корреляционная система навигации и наведения ATIPUS (Airborne Thermal Infrared Position Updating System), состоящая из инерциальной навигационной системы (ИНС), датчика физического поля Земли (ФПЗ) - инфракрасного (ИК) радиометра, дополнительной корректирующей системы - радиолокационной станции (РЛС), преобразователя сигналов и бортовой цифровой вычислительной машины (БЦВМ). Принцип действия данной комплексной КЭНС состоит в том, что входная информация в виде сигналов ФПЗ (теплового излучения), формируемых датчиком ФПЗ (ИК-радиометром), преобразуется в цифровую форму в блоке преобразователя сигналов, откуда поступает в БЦВМ для последующей обработки. После обработки входного сигнала определяется выходной сигнал коррекции путем сравнения преобразованного в цифровую форму текущего сигнала с эталонной картой (матрицей теплового излучения) данного участка местности, хранящейся в БЦВМ. Вырабатываемый в БЦВМ сигнал коррекции в дальнейшем используется для коррекции показаний инерциальной системы.
В данной системе предусмотрено использование независимых методов коррекции по ИК- и радиолокационному изображению.
Недостатком наиболее близкого аналога являются:
- необходимость хранения эталонов для каждого ФПЗ (теплового и радиолокационного), используемых при кадровой коррекции;
- ограничения на выбор участков кадровой коррекции с учетом сведения к минимуму возможных сезонных изменений характеристик подстилающей поверхности;
- большое время расчета сигнала коррекции, связанное с растровым представлением текущего и эталонного изображений.
Задачей изобретения является снижение объема хранения эталонной информации, снятие ограничений на выбор участков кадровой коррекции и сокращение времени расчетов, что в целом обеспечивает возможность проведения непрерывной коррекции и повышение точности навигации.
Достигается указанный результат тем, что в комплексную КЭНС, содержащую инерциальную навигационную систему, ИК-радиометр, РЛС, преобразователь сигналов и БЦВМ, дополнительно вводятся последовательно соединенные Блок формирования комплексного текущего изображения (ТИ) и Блок пороговой обработки ТИ, а также последовательно соединенные Блок хранения данных и Блок формирования эталонного изображения (ЭИ), причем вход Блока формирования комплексного ТИ подключен к выходу преобразователя сигналов, выходы Блока пороговой обработки ТИ и Блока формирования ЭИ - к входу БЦВМ, выход ИНС - ко входу Блока формирования ЭИ, а вход ИНС - к выходу БЦВМ, выходы ИК-радиометра и РЛС подключены ко входу преобразователя сигналов.
На фигуре 1 представлена блок-схема комплексной КЭНС, содержащей: 1 - инерциальную навигационную систему (ИНС), 2 - ИК-радиометр, 3 - РЛС, 4 - Преобразователь сигналов, 5 - Блок формирования комплексного ТИ, 6 - Блок пороговой обработки ТИ, 7 - Блок хранения данных, 8 - Блок формирования ЭИ, 9 - БЦВМ.
Информационный обмен между входами-выходами блоков осуществляется по линиям связи, показанным на чертеже сплошной линией. Линии связи представляют собой известные (описанные, например, в книге [Преснухин Л.Н., Нестеров П.В. Цифровые вычислительные машины. - М.: Высшая школа, 1981 г., стр.21-24, 394-406] линии связи и информационного обмена, например, по последовательному коду, по параллельному коду, мультиплексные, RS232 и др.
ИНС 1 обеспечивает измерение географических координат, скоростей и угловых эволюций летательного аппарата. ИНС 1 может быть построена в соответствии с известными принципами, изложенными, например, в [И.И. Помыкаев, В.П. Селезнев, Л.А. Дмитроченко «Навигационные приборы и системы. Издательство «Машиносторение», 1983 г., стр.226-329].
ИК-радиометр 2 обеспечивает измерение сигналов теплового излучения местности. ИК-изображение формируется за счет поступательного движения объекта вдоль траектории движения и вращения зеркала антенны (сканирования) в перпендикулярном направлении. ИК-радиометр может быть построен аналогично радиометру системы RAC (Radiometric Area Correlator) фирмы Lockhead, [И.Н. Белоглазов, Г.И. Джанджгава, Г.П. Чигин. Основы навигации по физическим полям, Москва, «Наука», Главная редакция физико-математической литературы, 1985 г., стр.28].
РЛС 3 обеспечивает измерение радиолокационного поля Земли. РЛС может быть построена аналогично РЛС «Обзор» разработки фирмы «Ленинец» г.Санкт-Петербург [Под редакцией Е.А. Федосова. Авиация ВВС России и научно-технический прогресс. Боевые комплексы и системы вчера, сегодня, завтра. Дрофа. Москва, 2005, стр.633-639].
Преобразователь сигналов 4 обеспечивает коммутацию и преобразование в цифровую форму выходных сигналов ИК-радиометра и РЛС. Преобразование сигналов ИК-радиометра и РЛС проводится на основе принципов обработки телевизионных изображений, изложенных, например, в [Под редакцией П.В. Шмакова. Телевидение. Москва «Связь» 1979 г., стр.394-410].
Блок формирования комплексного ТИ 5 предназначен для совмещения цифровых изображений ИК-радиометра и РЛС и формирования комплексного текущего изображения. Данный блок может быть реализован на программируемых логических интегральных схемах (ПЛИС), на базе которых последовательно осуществляются следующие операции:
- подавление шумов на каждом изображении (ИК-радиометра и РЛС);
- улучшение каждого изображения путем усиления его контрастов;
- калибровка и изменение размеров изображений с целью приведения их к попиксельному совпадению;
- совмещение изображений методом смешивания цветов пикселей;
- сглаживание для устранения эффекта расфокусирования комплексного изображения;
- фильтрация комплексного изображения для повышения его резкости.
В качестве ПЛИС можно использовать микросхемы серии Kintex-7 фирмы Xilinx [Xilinx Redefines Power, Performance, and Design Productivity with Three Innovative 28 nm FPGA Families: Virtex-7, Kintex-7, and Artix-7 Devices. Xilinx WP373 (v1.4) October 15, 2012]. Выбранная микросхема совместима по выводам с другими микросхемами фирмы Xilinx и при необходимости может быть заменена на более дешевый или более мощный вариант.
Подавление шумов может быть выполнено по типу медианного фильтра [Р. Гонсалес, Р. Вудс. Цифровая обработка изображений. Техносфера, Москва, 2006, стр.194-195]. Фильтр осуществляет замену значения пикселя на значение медианы распределения яркостей всех пикселей в его окрестности (включая и исходный). Чтобы выполнить медианную фильтрацию, например, для окрестности 3х3 элементов элемента изображения, необходимо сначала упорядочить по возрастанию значения яркостей пикселей внутри окрестности и затем присвоить компоненты цвета пятого значения медианы обрабатываемому элементу.
Для монохромных изображений яркость пикселя эквивалентна коду компоненты G, а для цветных изображений яркость пикселя может определяться, например, апробированным авторами выражением:
Y=(0.3*R+0.59*0+0.11*В)
где: R, G, В - значения цветовых компонент.
Принцип улучшения изображения путем усиления его контрастов основан на анализе гистограммы яркостей входного изображения (эквализация гисторгамм) [Р. Гонсалес, Р.Вудс. Цифровая обработка изображений. Техносфера, Москва, 2006, стр.150-166]. Сущность преобразования состоит в построении такой передаточной функции, в которой пикселю входного изображения с минимальной яркостью присваивается нулевое значение яркости, пикселю изображения, имеющего максимальную яркость, присваивается сто процентная яркость, а пикселям с промежуточными значениями яркости присваиваются значения, интерполированные по крутизне полученной функции.
Функция преобразования может быть линейной, но в некоторых случаях улучшение изображения, основанное на линейной функции преобразования, не является наилучшим подходом. В частности, иногда полезно получить иную форму гистограммы для обрабатываемого изображения.
Эквализация гисторгамм изображений также позволяет выровнять яркости разноспектральных изображений, что очень важно для дальнейшей обработки.
Калибровка и изменение размеров изображения с целью приведения их к попиксельному совпадению изображений от ИК-радиометра и РЛС проводится следующим образом.
Для проведения калибровки необходимо выделить на изображениях реперные точки (наиболее яркие и темные элементы изображения). Для этого можно воспользоваться методами пороговой обработки [Р. Гонсалес, Р. Вудс. Цифровая обработка изображений. Техносфера, Москва, 2006, стр.850-874].
Совмещение реперных точек осуществляется за счет применения аффинных преобразований (масштабирование, смещение, поворот) к координатам реперных точек одного из изображений. Целесообразно в качестве обрабатываемого (первого) изображения выбрать то, в котором выделилось меньшее количество опорных точек.
Оптимальный вариант совмещения выбирается по методу наименьших квадратов. Порядок расчетов следующий. Для каждого из возможных вариантов аффинных преобразований перебираются все реперные точки первого изображения. Для каждой из этих точек ищется ближайшая точка на втором изображении, и запоминается расстояние между ними. Далее рассчитывается и запоминается сумма квадратов разностей расстояний между реперными точками двух изображений для данного варианта аффинных преобразований. Оптимальным параметрам масштабирования, смещения и поворота соответствует минимальная сумма квадратов разностей расстояний между реперными точками двух изображений.
Соответствующие найденному оптимальному варианту аффинные преобразования применяют ко всему первому изображению. При этом используется метод билинейной интерполяции значения цветовых компонент изображения в ближайших соседних точках [Р. Гонсалес, Р. Вудс. Цифровая обработка изображений. Техносфера, Москва, 2006, стр.114-116].
Совмещение изображений методом смешивания цветов пикселей описано в [Мейсон ву, Джеки Нейдер, Том Девис, Дейв Шрайнер. OpenGL. Официальное руководство программиста. Издание DiaSoft. Москва. Санкт-Петербург. Киев. 2002, стр.206-211].
Сглаживание для устранения эффекта расфокусирования комплексного изображения может быть реализовано сглаживающими пространственными фильтрами, описанными в [Р. Гонсалес, Р. Вудс. Цифровая обработка изображений. Техносфера, Москва, 2006, стр.189-196].
Фильтрация комплексного изображения для повышения его резкости осуществляется пространственной фильтрацией повышения резкости, описанной в [Р. Гонсалес, Р. Вудс. Цифровая обработка изображений. Техносфера, Москва, 2006, стр.196-213].
Применение последних двух этапов обработки комплексного изображения (сглаживание и фильтрация) является новым подходом, предложенным и апробированным авторами.
Блок пороговой обработки ТИ 6 предназначен для выделения контуров на комплексном изображении с целью приведения к бинарному виду. Представленное таким образом ТИ имеет меньшую зависимость от различного рода искажений, метеорологических или сезонных условий. Данный блок может быть выполнен на вышеописанных ПЛИС, в которых реализуются операторы градиента [Р. Гонсалес, Р. Вудс. Цифровая обработка изображений. Техносфера, Москва, 2006, стр.825-836]. Наиболее широко используется для выделения границ маски операторов Канни, Собела и Превитта. Наиболее предпочтителен метод Канни (Canny), представляющий собой совокупность других методов. Он состоит из следующих этапов:
1) Изображение сглаживается (обычно с помощью фильтра Гаусса).
2) Находятся края на изображении (обычно используется метод Собеля или Робертса).
3) Находится направление градиента в каждой точке.
4) Значения углов округляются.
5) Проверяется, является ли значение градиента локальным максимумом в этом направлении, если точка не на краю, то ее значение устанавливается в 0, эту фазу также называют тонкими краями "thin edges" или не максимальным подавлением «non-maximum suppression».
6) Изображение обрабатывается двумя порогами. Если значение градиента в точке выше некоторого порога T1, то эта точка считается границей. Далее смотрятся точки вокруг найденной границы и, если значения их градиентов выше некоторого порога Т2, то они также считаются границей.
Блок хранения данных 7 предназначен для хранения эталонной информации, подготовленной специальным образом, обладающим новизной. Известно, что элементы изображения в ИК- и радиолокационном диапазоне представляют собой множество значений яркости, среди которых можно выделить однородные области, соответствующие определенным объектам на топографической карте. На основе анализа и сравнения изображений ИК- и радиолокационного диапазонов с цифровой топографической картой местности, авторами был составлен классификатор картографической информации. Данный Классификатор определяет перечень объектов, порождающих стабильные границы с окружающим фоном. В Классификатор попали различные линейные объекты и границы площадных объектов. Среди них объекты как созданные человеком - дороги, границы кварталов в населенных пунктах, так и естественные границы - береговые линии, контуры лесных массивов.
Эталонная информация подготавливается следующим образом. За основу берется цифровая карта местности (ЦКМ) векторного формата, например, SXF (Storage and eXchange Format). SXF - открытый формат цифровой информации о местности, предназначенный для применения в геоинформационных системах и утвержденный в качестве основного обменного формата цифровой информации о местности в Вооруженных Силах и ряде федеральных служб РФ. Информация об объектах в формате SXF хранится в виде координат вершин линий или полигональных объектов (широта, долгота и высота). В таком виде ЦКМ несколько избыточна для использования в качестве эталона, поэтому из данной карты выбираются только те контуры объектов, которые вошли в вышеупомянутый Классификатор.
Помимо ЦКМ при подготовке эталонной информации используются фотоснимки той же местности. Первоначально проводится процедура выделения границ на фотоснимках, например методом Канни. После чего выполняется процедура сравнения контуров ЦКМ и полученных границ на фотоснимках. Координаты пикселов границ на фотоснимках в «коридоре» шириной Dpix вдоль контуров ЦКМ заносятся в эталонную информацию. Таким образом, в предлагаемой КЭНС:
- нет необходимости хранения эталонов для каждого ФПЗ (теплового и радиолокационного);
- сведены к минимуму возможные сезонные изменения характеристик подстилающей поверхности;
- эталонная информация хранится в векторном виде, что позволяет снизить как объем хранимой эталонной информации, так и время корреляционно-экстремальной обработки.
Блок формирования ЭИ 8 предназначен для 3D преобразования эталонной информации в ЭИ в соответствии с координатами (высотой, географическими широтой и долготой) и угловыми эволюциями ЛА (креном, тангажом и курсом), поступающими от ИНС, шагом перебора по вышеупомянутым 6-и параметрам и характеристиками моделируемого датчика технического зрения (угол обзора, форматное соотношение высоты кадра к ширине). Авторами предлагается получать эталонное изображение с использованием 3D преобразований, аппаратно поддерживаемых в современных графических процессорах на базе функций открытой библиотеки OpenGL [Мейсон ву, Джеки Нейдер, Том Девис, Дейв Шрайнер. OpenGL. Официальное руководство программиста. Издание DiaSoft. Москва. Санкт-Петербург. Киев. 2002, стр.206-211]. Блок формирования ЭИ 8 можно выполнить с использованием графического процессора на основе семейства микросхем фирмы AMD [Radeon R5xx Acceleration, Revision 1.5, June 8, 2010], реализующих функции стандартной библиотеки OpenGL.
БЦВМ 9 предназначена для вычисления функционала, определяющего меру сходства эталонного и текущего изображений. Для бинарных изображений наиболее целесообразно использовать парные критериальные функции [Баклицкий В.К., Бочкарев A.M., Мусьяков М.П. Методы фильтрации сигналов в корреляционно-экстремальных системах навигации. М.: Радио и связь, 1986, стр.94-96]. Отличительной чертой предлагаемого метода является то, что сравнение изображений производится последовательно по всем ненулевым элементам (границам) ЭИ. Данный подход позволяет, с одной стороны, исключить из рассмотрения шумы на ТИ, с другой стороны, сократить количество вычислений за счет обработки только ненулевых элементов ЭИ. Суть вычислений состоит в следующем. Если каждый элемент ЭИ при сдвиге (х,у) относительно ТИ имеет уровень квантования яркости i, а каждый элемент ТИ имеет уровень j, то парная функция Fij(x,y), 0≤i,j≤2n-1 увеличивается на 1. Здесь 2n - число уровней квантования. Следовательно, при бинарном изображении функция Fij(x,y) равна числу совпавших границ. Такая парная функция называется простейшей.
Примером более сложной критериальной парной функции является функция F1 [Баклицкий В.К., Бочкарев A.M., Мусьяков М.П. Методы фильтрации сигналов в корреляционно-экстремальных системах навигации. М.: Радио и связь, 1986. стр.95], вычисляющая отношение общего числа совпадений Fii к общему числу возможных совпадений N.
Так как при поиске (переборе по 6-и параметрам: 3-м координатам и 3-м углам эволюции) и вычислении экстремума функционала требуется производить множество однотипных операций, БЦВМ 9 целесообразно выполнить на вышеописанных ПЛИС.
Следует отметить, что предложенные в комплексной КЭНС подходы позволяют использовать помимо ИК-радиометра и РЛС датчики технического зрения, работающие в любом спектральном диапазоне, в том числе оптико-электронные системы и лазерные локаторы (лидары).
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОСВЕЩЕНИЯ ЛЕДОВОЙ ОБСТАНОВКИ И ПРЕДОТВРАЩЕНИЯ ВОЗДЕЙСТВИЯ ЛЕДОВЫХ ОБРАЗОВАНИЙ НА МОРСКИЕ ОБЪЕКТЫ ХОЗЯЙСТВЕННОЙ ДЕЯТЕЛЬНОСТИ | 2014 |
|
RU2583234C1 |
| Навигационная комбинированная оптическая система | 2018 |
|
RU2694786C1 |
| СИСТЕМА КОМПЛЕКСНОЙ ОБРАБОТКИ ИНФОРМАЦИИ РАДИОНАВИГАЦИОННЫХ И АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ДЕЙСТВИТЕЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ САМОЛЕТОВОЖДЕНИЯ | 2012 |
|
RU2487419C1 |
| Способ формирования радиотеплового изображения | 2017 |
|
RU2661491C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ ТЕКСТОВЫХ ФОРМ НА ИЗОБРАЖЕНИЯХ | 2016 |
|
RU2697737C2 |
| СПОСОБ ФОРМИРОВАНИЯ КОНТУРНОГО ИЗОБРАЖЕНИЯ | 2019 |
|
RU2714381C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС, ИСПОЛЬЗУЮЩИЙ ЕСТЕСТВЕННЫЕ И ИСКУССТВЕННЫЕ ПОЛЯ ЗЕМЛИ | 2014 |
|
RU2558647C1 |
| СПОСОБ ПОМЕХОУСТОЙЧИВОГО ГРАДИЕНТНОГО ВЫДЕЛЕНИЯ КОНТУРОВ ОБЪЕКТОВ НА ЦИФРОВЫХ ПОЛУТОНОВЫХ ИЗОБРАЖЕНИЯХ | 2016 |
|
RU2648954C2 |
| Способ совмещения одновременно получаемых изображений от матричных фотоприёмников разного спектрального диапазона | 2019 |
|
RU2705423C1 |
| Способ фрактального комплексирования многочастотных радиолокационных изображений | 2020 |
|
RU2746038C1 |
Изобретение относится к авиационному приборостроению. Предложенная комплексная корреляционно-экстремальная навигационная система (КЭНС) предназначена для обеспечения автономной высокоточной коррекции на основе использования информации о нескольких поверхностных физических полях Земли, полученной датчиками технического зрения. В состав комплексной КЭНС входят инерциальная навигационная система, инфракрасный (ИК) радиометр, радиолокационная станция (РЛС), преобразователь сигналов, бортовая цифровая вычислительная машина, Блок формирования комплексного текущего изображения (ТИ), Блок пороговой обработки ТИ, Блок хранения данных и Блок формирования эталонного изображения. Данная комплексная КЭНС позволяет снизить объем хранения эталонной информации, снять ограничения на выбор участков кадровой коррекции и сократить время расчетов, что в целом обеспечивает возможность проведения непрерывной коррекции и повышение точности навигации. Предложенные в комплексной КЭНС подходы позволяют использовать помимо ИК-радиометра и РЛС датчики технического зрения, работающие в любом спектральном диапазоне, в том числе оптико-электронные системы и лазерные локаторы (лидары).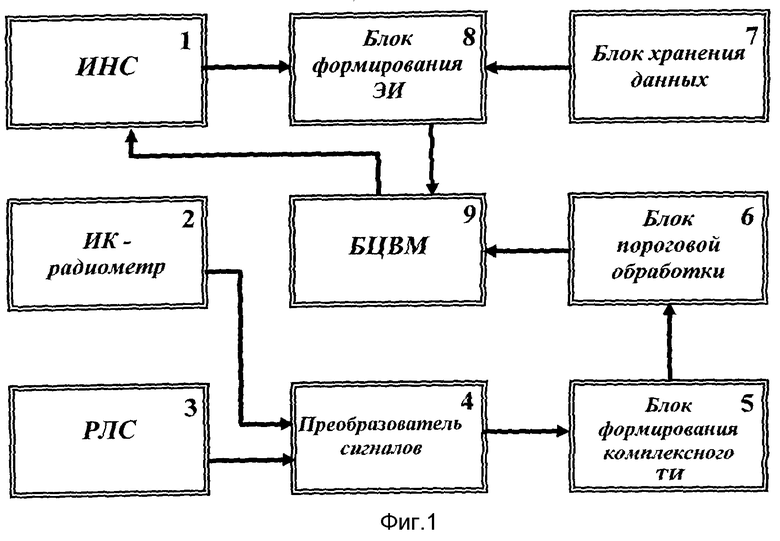
Комплексная корреляционно-экстремальная навигационная система, содержащая инерциальную навигационную систему (ИНС), инфракрасный (ИК) радиометр, радиолокационную станцию (РЛС), преобразователь сигналов и бортовую цифровую вычислительную систему (БЦВМ), отличающаяся тем, что в нее дополнительно введены последовательно соединенные Блок формирования комплексного текущего изображения (ТИ) и Блок пороговой обработки ТИ, а также последовательно соединенные Блок хранения данных и Блок формирования эталонного изображения (ЭИ), причем вход Блока формирования комплексного ТИ подключен к выходу преобразователя сигналов, выходы Блока пороговой обработки ТИ и Блока формирования ЭИ - к входу БЦВМ, выход ИНС - ко входу Блока формирования ЭИ, а вход ИНС - к выходу БЦВМ, выходы ИК-радиометра и РЛС подключены ко входу преобразователя сигналов.
| БЕЛОГЛАЗОВ И.Н., ДЖАНДЖГАВА Г.И., ЧИГИН Г.П | |||
| Основы навигации по геофизическим полям | |||
| - М.: Наука, 1985 | |||
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2471152C1 |
| ПАССИВНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИЗЛУЧАЮЩЕГО ОБЪЕКТА | 1998 |
|
RU2134891C1 |
| US 5636122 А, 03.06.1997 | |||
| СПОСОБ НАВИГАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2009 |
|
RU2406071C1 |

