Изобретение относится к области навигации движущихся объектов и может быть использовано при построении различных систем локации, предназначенных для уточнения местоположения движущихся объектов (ДО) и управления их движением.
Известны способы навигации ДО [1], основанные на сравнении текущих карт местности, полученных с использованием радиоволн, с эталонными картами той же местности, в основе которых лежит определение местоположения ДО с последующим управлением движением ДО путем коррекции их местоположения. Эталонные карты установлены на ДО до начала их движения, а текущие снимают во время полета ДО. По отклонениям текущих карт местности от эталонных в заданной точке траектории движения ДО определяют отклонение фактической траектории от заданной. В результате определяют поправку в местоположение ДО с целью коррекции их движения.
Известен способ навигации движущихся объектов [2], заключающийся в подгонке контуров местности на основе определения местоположения ДО с использованием радиоволн, позволяющий снимать информацию текущей точке.
Реализация способа [2] заключается в следующем.
Используют информацию эталонной карты местности о навигационном поле Земли.
Выбирают мерный участок местности на эталонной карте, который определяется величиной допустимых отклонений ДО по дальности.
Измеряют при помощи излучения и приема радиоволн плановые координаты xT и yT текущей карты местности.
Измеряют инерциальным способом текущие значения углов крена, тангажа и курса.
Составляют для мерного участка текущую карту с учетом информации об углах крена, тангажа и курса на основе измерений xT и yT.
Определяют значение функции в точке xЭ и yЭ для эталонной карты местности после прохождения ДО мерного участка.
Совмещают реализации функций φ(xT, yT) текущей карты со значениями φ(xЭ, yЭ) эталонной карты посредством обеспечения условий xЭ⇒xT, yЭ⇒yT.
Сравнивают текущее φ(xT, yT) и эталонное φ(xЭ, yЭ) значения.
Вычисляют сигнал коррекции местоположения ДО.
Управляют движением ДО путем коррекции его местоположения.
Недостатками способа [2] являются отсутствие информации о текущем местоположении ДО в процессе движения над мерным участком; низкое быстродействие, поскольку сигнал коррекции движения ДО вырабатывается только после прохождения всего мерного участка, а также низкая помехоустойчивость, так как измерения для вычисления сигнала коррекции движения ДО проводят при помощи излучения и приема радиоволн в процессе движения над мерным участком.
Известен способ навигации ДО [3], выбранный за прототип. Реализация способа [3] заключается в следующем.
Используют информацию эталонной карты (заданной карты) местности о навигационном поле Земли, содержащую информацию о местоположении реперных объектов (РО).
Выбирают участок местности на эталонной карте, который представляет собой заданную карту о пролетаемой местности.
Выбирают на эталонной карте РО, плановые координаты которых известны. Выбор РО проводят следующим образом:
- задают на карте видимые наземные ориентиры в количестве i, которые представляют собой РО;
- определяют на карте координаты всех РО;
- запоминают координаты всех РО;
- присваивают каждому РО свой номер.
Используют эталонную карту РО с выбранными РО.
Получают текущую карту РО следующим образом:
- осуществляют визуальный поиск РО на поверхности земли;
- проводят визуальную идентификацию видимого РО, плановые координаты которого известны с наибольшей точностью по карте пролетаемой местности;
- устанавливают номер идентифицированного РО;
- устанавливают координаты РО данного номера в прямоугольной системе координат;
- определяют курсовой угол РО данного номера;
- определяют угол места выбранного РО данного номера;
- проводят пересчет географических координат РО данного номера в прямоугольные координаты;
- проводят расчет азимута РО с учетом координат наземного РО данного номера и его географических координат;
- инерциальным способом измеряют текущие значения углов крена и тангажа;
- вычисляют по значениям углов крена и тангажа ДО, а также по значениям углов визирования РО данного номера и геометрической высоты ДО:
- курсовой угол РО данного номера в горизонтальной плоскости (угол между проекцией продольной оси ДО на плоскость горизонта и проекцией луча визирования на плоскость горизонта);
- проекцию линейной дальности от ДО до РО данного номера на плоскость горизонта;
- вычисляют истинный курс ДО.
Сравнивают текущую и эталонную карты РО.
Вычисляют сигнал коррекции местоположения ДО.
Управляют движением ДО путем коррекции его местоположения.
Недостатками способа [3] являются недостаточное быстродействие определения местоположения ДО, поскольку обработка полученной информации осуществляется только после визуального поиска РО и определения азимута на РО на текущей карте местности, а также проведение видимой идентификации ориентиров, которая полностью определяется погодными условиями.
Техническим результатом предлагаемого изобретения является повышение быстродействия и помехоустойчивости способа навигации движущихся объектов.
Технический результат достигается тем, что в способе навигации движущихся объектов, заключающемся в использовании эталонной карты местности, содержащей реперные объекты, координаты которых известны, составлении текущей карты реперного объекта, определении координат реперного объекта, сравнении текущей и эталонной карт реперного объекта, вычислении сигнала коррекции траектории движения и управлении движением движущихся объектов путем коррекции их местоположения, выбирают на земной поверхности реперный объект, находящийся в пределах эталонной карты реперного объекта. Получают одну текущую карту выбранного реперного объекта, преобразуют текущую карту реперного объекта в цифровое изображение текущей карты реперного объекта, распознают реперный объект на цифровом изображении текущей карты, определяют местоположение и пространственные параметры реперного объекта на цифровом изображении текущей карты реперного объекта, а сравнение эталонной и текущей карт проводят путем подгонки параметров распознанного реперного объекта на цифровом изображении текущей карты реперного объекта до совпадения с параметрами реперного объекта на цифровом изображении эталонной карты реперного объекта, используя цифровые методы обработки изображений. Реперный объект является пространственно-распределенным. Текущую карту выбранного РО получают в одном или нескольких диапазонах длин волн, по одному изображению в каждом диапазоне. Сравнение цифровых изображений эталонной и текущей карт РО включает в себя подгонку параметров распознанного реперного объекта на цифровом изображении текущей карты реперного объекта по местоположению и пространственным параметрам.
Технический результат достигается тем, что при реализации способа навигации ДО используют только одно цифровое изображение области реперного объекта и при помощи цифровой обработки производят распознавание и подгонку параметров реперного объекта на цифровом изображении области реперного объекта до совпадения с параметрами реперного объекта на цифровом изображении эталонной карты реперного объекта.
Способ навигации ДО осуществляется следующим образом.
Используют информацию эталонной карты местности о навигационном поле Земли, содержащую цифровую информацию о местоположении и пространственных параметрах реперных объектов.
Выбирают участок местности на эталонной карте, который представляет собой мерный участок.
Выбирают на мерном участке реперные объекты, плановые координаты и пространственные параметры которых известны.
Выбирают на мерном участке реперный объект, который может быть распознан с наибольшей точностью. Используют эталонную карту мерного участка с выбранным реперным объектом.
Измеряют инерциальным способом текущие значения углов крена и тангажа и курса.
Получают текущую карту РО (область РО) при движении ДО над мерным участком в виде одного изображения мерного участка в одном или нескольких диапазонах длин волн.
Преобразуют текущую карту РО в цифровое изображение области РО.
Распознают РО на цифровом изображении области РО.
Определяют параметры распознанного РО на цифровом изображении области РО.
Сравнивают эталонную и текущую карты путем их совмещения. Сравнение эталонной и текущей карт РО проводят путем подгонки параметров распознанного РО на цифровом изображении области РО до совпадения с параметрами РО на цифровом изображении эталонной карты РО. Сравнение выполняется с учетом информации об углах крена, тангажа и курса.
Определяют местоположение и пространственное. смещение ДО в плановых координатах мерного участка на основе анализа взаимных смещений эталонной и текущей карт РО.
Вычисляют сигнал коррекции местоположения ДО.
Управляют движением ДО путем коррекции его местоположения.
Способ навигации ДО реализуется следующим образом.
Используют информацию эталонной карты местности (цифрового изображения эталонной карты) о навигационном поле Земли, установленной на ДО до начала движения, содержащую цифровую информацию о местоположении и пространственных параметрах реперных объектов. Каждый из РО является пространственно-распределенным.
Выбирают мерный участок на эталонной карте, размеры которого определяются величиной допустимых отклонений ДО по плановым координатам с учетом увеличения размеров из-за возможного отклонения текущих значений углов крена и тангажа и курса от эталонных, задаваемых до начала движения ДО.
Выбирают на мерном участке реперный объект. Выбор производят следующим образом:
- находят на мерном участке пространственно-распределенные объекты, которые представляют собой РО;
- распознают РО на цифровом изображении мерного участка.
Распознавание производят с помощью трехэтапной обработки цифрового изображения мерного участка [4, 5]. На первом этапе осуществляют разбиение цифрового изображения мерного участка на составляющие его образы путем сегментации изображения и формирования образов объектов. На втором этапе для каждого образа рассчитывают набор классификационных признаков путем построения аналитического описания образов объектов. На третьем этапе на основе полученных наборов классификационных признаков производят распознавание РО с учетом его пространственной ориентации;
- определяют местоположение и пространственные параметры всех распознанных РО на цифровом изображении мерного участка.
Определяют координаты центра тяжести РО в плановой системе координат (Xc, Yc) цифрового изображения мерного участка для расчета его местоположения.
Определение координат центра тяжести реперных объектов в плановой системе координат производят следующим образом:
где i - абсцисса реперного объекта, j - ордината реперного объекта, S - площадь реперного объекта, hij - параметр, равный 1, если точка принадлежит реперному объекту, и равный 0, если не принадлежит ему.
Определяют пространственную ориентацию РО (угловое положение РО) посредством построения большой и малой главных осей распознанного РО, проведенных через его центр тяжести, в плановой системе координат цифрового изображения мерного участка.
Размеры РО определяют посредством измерения длины большой и малой главных осей РО, а также длины РО в точках начала и конца большой и малой главных осей (перпендикулярно осям);
- выбирают на цифровом изображении мерного участка реперный объект, который распознан с наибольшей точностью;
- запоминают местоположение и пространственные параметры выбранного реперного объекта.
Используют эталонную карту мерного участка с выбранным РО (цифровое изображение эталонной карты РО).
Измеряют инерциальным способом текущие значения углов крена и тангажа и курса.
Получают текущую карту РО при движении ДО над мерным участком в виде одного изображения мерного участка в одном или нескольких диапазонах волн, таких как в инфракрасном, видео- или радиодиапазонах (по одному изображению в каждом диапазоне) с помощью пассивных методов [6]. В радиодиапазоне, например, при помощи радиовидения [7]. Принимая излученный сигнал одного или нескольких диапазонов длин волн, получают текущую карту РО.
Преобразуют текущую карту РО в цифровое изображение области РО. Алгоритм получения цифрового изображения области РО включает следующие операции:
- совмещение центра цифрового изображения области РО с осью приемника (направлением, обеспечивающим прием сигнала с наибольшим значением);
- выбор размера цифрового изображения области РО, равного полю зрения приемника, не менее размера цифрового изображения эталонной карты РО;
- определение размера каждого пиксела цифрового изображения области РО как отношения размера поля зрения приемника к числу пикселов по плановым координатам (X, Y).
Выбор алгоритма получения цифрового изображения области РО в указанном виде позволяет получить однозначное соответствие местоположения каждого пиксела цифрового изображения области РО его угловому положению относительно оси приемника.
Алгоритм преобразования текущей карты РО в цифровое изображение области РО включает следующие операции:
- аналого-цифровое преобразование текущей карты РО в цифровое изображение области РО;
- преобразование цифрового изображения области РО в соответствии с измеренными текущими значениями углов крена, тангажа и курса.
Преобразование цифрового изображения области РО в соответствии с измеренными текущими значениями углов крена, тангажа и курса производят следующим образом:
- по значению текущих углов крена, тангажа и курса в момент получения текущей карты РО определяют смещение оси приемника (центра цифрового изображения области РО) относительно вертикали;
- определяют на цифровом изображении области РО местоположение точки, соответствующей проекции вертикали на цифровое изображение области РО;
- совмещают центр цифрового изображения области РО с вертикалью путем переноса центра цифрового изображения области РО в точку, соответствующую проекции вертикали на цифровое изображение области РО.
Распознают РО на цифровом изображении области РО. Распознавание производят с помощью трехэтапной обработки цифрового изображения области РО [4, 5]. На первом этапе осуществляют разбиение цифрового изображения области РО на составляющие его образы, путем сегментации изображения и формирования образов объектов. На втором этапе для каждого образа рассчитывают набор классификационных признаков путем построения аналитического описания образов объектов. На третьем этапе на основе полученных наборов классификационных признаков производят распознавание РО с учетом его пространственной ориентации.
Определяют местоположение и пространственные параметры распознанного РО на цифровом изображении области РО:
- определяют координаты центра тяжести распознанного РО в плановой системе координат (Xc, Yc) цифрового изображения области РО для расчета его местоположения. Определение координат центра тяжести реперного объекта в плановой системе координат производят в соответствии с формулой (1);
- определяют пространственную ориентацию распознанного РО (угловое положение распознанного РО) посредством построения большой и малой главных осей распознанного РО, проведенных через его центр тяжести в плановой системе координат цифрового изображения области РО.
- определяют размеры распознанного РО посредством измерения длины большой и малой главных осей распознанного РО, а также длины РО в точках начала и конца большой и малой главных осей (перпендикулярно осям).
Сравнивают эталонную и текущую карты РО путем их совмещения. Совмещение эталонной и текущей карт (подгонку параметров распознанного РО на цифровом изображении области РО до совпадения с параметрами РО на цифровом изображении эталонной карты РО) производят следующим образом:
- уточняют параметры распознанного РО на цифровом изображении области РО (местоположение, пространственная ориентация и размеры распознанного РО) в соответствии с измеренными текущими значениями углов крена, тангажа и азимута;
- масштабируют распознанный РО (изменяют масштаб приближения к РО) на цифровом изображении области РО по отношению к РО на цифровом изображении эталонной карты РО;
- совмещают по пространственной ориентации (по пространственным параметрам) распознанный РО на цифровом изображении области РО и на цифровом изображении эталонной карты РО;
- совмещают по местоположению (по плановым координатам) распознанный РО на цифровом изображении области РО с РО на цифровом изображении эталонной карты РО.
Уточнение параметров распознанного РО на цифровом изображении области РО, необходимое для учета текущих значений углов крена, тангажа и курса, производят следующим образом:
- уточняют размеры распознанного РО на цифровом изображении области РО;
- уточняют координаты центра тяжести и пространственную ориентацию распознанного РО на цифровом изображении области РО.
Уточнение размеров распознанного РО производят следующим образом [8].
Изменение крена (угла визирования θ к линии горизонта) моделируют вращением распознанного РО в плоскости изображения. Для этого сначала производят перенос начала координат в центр описывающего распознанный РО прямоугольника (точка пересечения его диагоналей). Затем производят преобразование поворота. После чего производят возврат начала координат в первоначальную точку. Для уменьшения числа вычислений данное преобразование производится с помощью матриц преобразований. Поэтому сначала рассчитывают матрицу преобразования, а затем для каждой точки в описывающем прямоугольнике производят вычисление произведения вектора координат на матрицу преобразования

Здесь (x', y', w') - однородные трехмерные координаты точки на плоскости после преобразования; (x, y, w) - однородные трехмерные координаты точки на плоскости до преобразования; М - матрица преобразования в виде

Изменение размеров распознанного РО при изменении угла визирования к линии горизонта на угол θ=30° показано на фиг.1, на которой пунктиром показаны первоначальные размеры изображения распознанного РО, сплошной линией - размеры распознанного РО после преобразования.
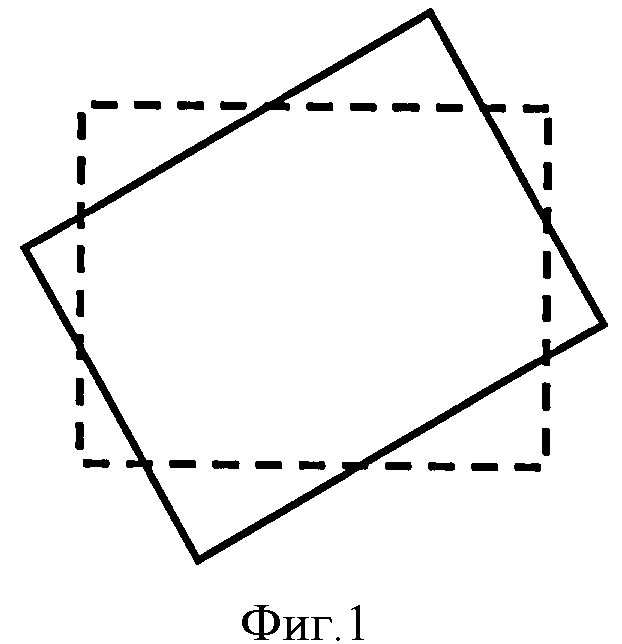
Изменение курса (угла визирования α в азимутальной плоскости) моделируют трапециевидной деформацией распознанного РО с уменьшением правой или левой стороны при увеличении размеров распознанного РО по оси Х большем, чем по оси Y. Размеры описывающего четырехугольника при этом определяются по следующим формулам:
где dα - коэффициент деформации, определяемый как  ,
,
Изменение размеров распознанного РО при изменении угла визирования в азимутальной плоскости на угол α=30° показано на фиг.2, на которой пунктиром показаны первоначальные размеры изображения распознанного РО, сплошной линией - размеры распознанного РО после преобразования.
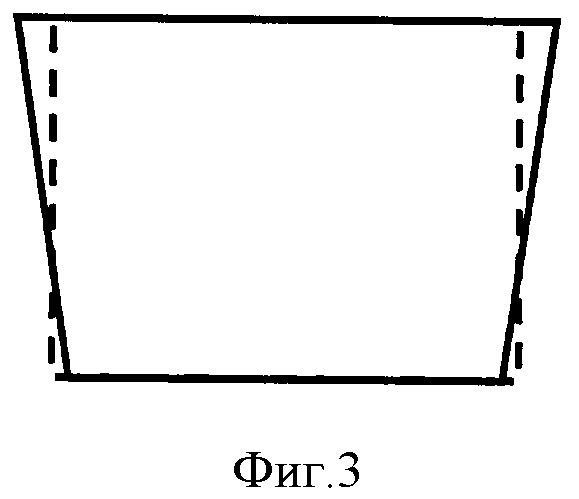
Изменение тангажа (угла визирования β в радиальной плоскости) моделируют трапециевидной деформацией распознанного РО с уменьшением верхней или нижней стороны при увеличении размеров распознанного РО по оси Х большем, чем по оси Y. Размеры описывающего четырехугольника определяют в виде
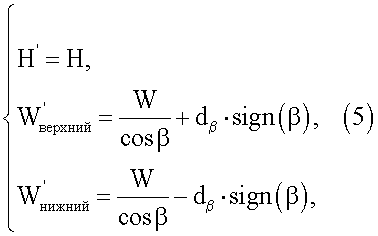
где dβ - коэффициент деформации, определяемый как 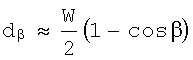 .
.
Изменение размеров распознанного РО при изменении угла визирования в радиальной плоскости на угол β=30° показано на фиг.3, на которой пунктиром показаны первоначальные размеры изображения распознанного РО, сплошной линией - размеры распознанного РО после преобразования.
Уточнение координат центра тяжести распознанного РО производят в плановой системе координат (Xc, Yc) цифрового изображения области РО в соответствии с формулой (1), а также уточняют пространственную ориентацию распознанного РО на цифровом изображении области РО.
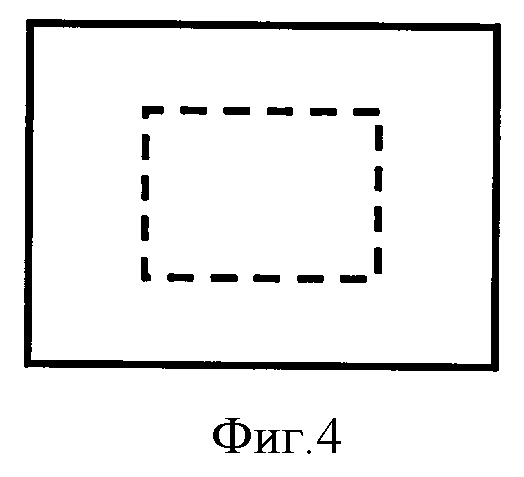
Масштабирование распознанного РО на цифровом изображении области РО по отношению к РО на цифровом изображении эталонной карты РО производят равномерным увеличением размеров распознанного РО по осям x и y (большой и малой главных осей распознанного РО) [8], причем одновременно выполняются следующие условия:

Здесь W′ и Н′ - ширина и высота прямоугольника, описанного вокруг распознанного РО, после преобразования (в пикселях); W и Н - ширина и высота прямоугольника, описанного вокруг распознанного РО, до преобразования (в пикселях); Dx и Dy - коэффициенты масштабирования (оба больше единицы).
Изменение размеров распознанного РО при уменьшении масштаба приближения показано на фиг.4, на которой пунктиром показаны первоначальные размеры изображения распознанного РО, сплошной линией - размеры распознанного РО после преобразования.
Совмещение по пространственной ориентации (по пространственным параметрам) РО производят совмещением (поворотом) большой и малой главных осей распознанного РО на цифровом изображении области РО с большой и малой главными осями РО на цифровом изображении эталонной карты РО.
Совмещение по местоположению (по плановым координатам) распознанного РО на цифровом изображении области РО и на цифровом изображении эталонной карты РО производят путем совмещения координат центра тяжести распознанного РО на цифровом изображении области РО с координатами центра тяжести РО на цифровом изображении эталонной карты РО.
Указанные преобразования: обеспечивают совмещение эталонной и текущей карт - подгонку параметров распознанного РО на цифровом изображении области РО до совпадения с параметрами РО на цифровом изображении эталонной карты РО; определяют смещение координат центра тяжести распознанного РО на цифровом изображении области РО по отношению к РО на цифровом изображении эталонной карты РО и смещение местоположения ДО в плановых координатах мерного участка.
Вычисляют сигнал коррекции местоположения.
Управляют движением ДО путем коррекции его местоположения.
Таким образом, предлагаемый способ навигации движущихся объектов обладает рядом существенных преимуществ перед известными способами навигации, поскольку позволяет повысить помехоустойчивость и сократить время коррекции местоположения движущихся объектов. Эти существенные отличия обеспечиваются за счет определения поправок местоположения ДО только по одному цифровому изображению распознанного реперного объекта и уменьшения времени идентификации, исключая операции визуального поиска реперного объекта и определения азимута на реперный объект на текущей карте местности, а также путем использования только пассивных методов получения текущей карты реперного объекта и цифровых методов обработки.
ЛИТЕРАТУРА
1 Цыпкин Я.З., Попков Ю.С. Теория нелинейных импульсных систем. - М.: Наука, 1973.
2 Белоглазов И.Н., Тарасенко В.П. Корреляционно-экстремальные системы. - М.: Сов. радио, 1974.
3 Патент 2115890 РФ, МПК G01C 23/00. Комплексная навигационная система. / Белов В.В., Куколевский О.И. // Опубликовано 20.07.1998 г. (прототип).
4 Гонсалес Р., Вудс Р. Цифровая обработка изображений. - М.: Техносфера, 2006. - 1072 с. (С.89-114).
5 Ляпин А.И., Хрусталев А.А., Суворов Е.Ю., Аникина Е.Н. Методы обработки изображений и распознавания объектов на меняющемся фоне // Тезисы докладов международной специализированной выставки-конференции военных и двойных технологий «Новые технологии в радиоэлектронике и системах управления». - Н.Новгород, 2002. С.64-65.
6 Алексеев Е.Г., Банкгальтер Р.И., Курилкин В.В., Моченов В.А. Оценка качества функционирования интегральной оптико-радиолокационной головки самонаведения // Радиотехника. - 2004. - N11. - C.3-11.
7 Кондратенков Г.С., Фролов А.Ю. Радиовидение. Радиолокационные системы дистанционного зондирования Земли. - М.: Радиотехника, 2005.
8 Вельтмандер П.В. Основные алгоритмы компьютерной графики. - Новосибирск: Изд-во НГУ, 1997.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВИГАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2011 |
|
RU2481557C1 |
| СПОСОБ НАВИГАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2013 |
|
RU2542720C1 |
| СПОСОБ НАВИГАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2014 |
|
RU2559820C1 |
| Способ навигации движущихся объектов | 2016 |
|
RU2623452C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2471152C1 |
| Способ навигации летательных аппаратов | 2016 |
|
RU2611564C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2005 |
|
RU2284544C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2007 |
|
RU2338158C1 |
| СПОСОБ НАВИГАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2008 |
|
RU2385468C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2018 |
|
RU2680969C1 |
Изобретение относится к области приборостроения и может быть использовано в различных системах локации, предназначенных для определения местоположения движущихся объектов (ДО). Технический результат - повышение быстродействия и помехоустойчивости. Для достижения данного результата осуществляют выбор реперного объекта (РО), генерацию и преобразование текущей карты РО, распознают РО на цифровом изображении текущей карты и определяют местоположение РО. При этом текущую карту, выбранного РО, получают в одном или нескольких диапазонах длин волн, по одному изображению в каждом диапазоне. 3 з.п. ф-лы, 4 ил.
1. Способ навигации движущихся объектов, заключающийся в использовании эталонной карты местности, содержащей реперные объекты, координаты которых известны, составлении текущей карты реперного объекта, определении координат реперного объекта, сравнении текущей и эталонной карт реперного объекта, вычислении сигнала коррекции траектории движения и управлении движением движущихся объектов путем коррекции их местоположения, отличающийся тем, что выбирают на земной поверхности реперный объект, находящийся в пределах эталонной карты реперного объекта, получают одну текущую карту выбранного реперного объекта, преобразуют текущую карту реперного объекта в цифровое изображение текущей карты реперного объекта, распознают реперный объект на цифровом изображении текущей карты, определяют местоположение и пространственные параметры распознанного реперного объекта на цифровом изображении текущей карты реперного объекта, а сравнение эталонной и текущей карт реперного объекта проводят путем подгонки параметров распознанного реперного объекта на цифровом изображении текущей карты реперного объекта до совпадения с параметрами реперного объекта на цифровом изображении эталонной карты реперного объекта, используя цифровые методы обработки изображений.
2. Способ по п.1, отличающийся тем, что реперный объект выбирают пространственно-распределенным.
3. Способ по п.1, отличающийся тем, что текущую карту выбранного реперного объекта получают в одном или нескольких диапазонах длин волн, по одному изображению в каждом диапазоне.
4. Способ по п.1, отличающийся тем, что сравнение эталонной и текущей карт реперного объекта включает в себя подгонку параметров распознанного реперного объекта на цифровом изображении текущей карты реперного объекта по местоположению и пространственным параметрам.
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1992 |
|
RU2115890C1 |
| ЦЫПКИН Я.З., ПОПКОВ Ю.С | |||
| Теория нелинейных импульсных систем | |||
| - М.: Наука, 1973, с.123-160 | |||
| БЕЛОГЛАЗОВ И.Н., ТАРАСЕНКО В.П | |||
| Корреляционно-экстремальные системы | |||
| - М.: Сов | |||
| радио, 1974, с.215-248 | |||
| СПОСОБ АКТУАЛИЗАЦИИ ЦИФРОВЫХ КАРТ МЕСТНОСТИ | 1999 |
|
RU2165596C1 |
| US 5636122 А, 03.06.1997 | |||
| ГОНСАЛЕС Р., ВУДС Р | |||
| Цифровая обработка изображений | |||
| - М.: Техносфера, | |||

