Изобретение относится к испытательной технике, а именно к внешнетраекторной регистрации параметров пролета метаемого объекта (МО) на участках промежуточной и внешней баллистики при пулеосколочных испытаниях.
Известно «Устройство для измерения скорости полета пули и снаряда», описанное в патенте РФ №2089917, МПК6 G01P3/66, опубл. 10.09.1997 г., которое используется в экспериментальной баллистике при испытаниях стрелкового и спортивно-охотничьего оружия и боеприпасов к ним. Данное устройство содержит два кольцевых магнитоиндукционных датчика, сигнальные обмотки которых охвачены витком из магнитомягкого материала, разнесенные на базовое расстояние вдоль траектории полета, схему формирования импульсов, два одновибратора, инвертор, измеритель временных интервалов и вычислитель, нормирующий усилитель, нуль-орган и схему совпадения. Сигнальные обмотки магнитоиндукционных датчиков подключены к входу первого одновибратора через последовательно соединенные нормирующий усилитель и нуль-орган (схему обнуления), выход первого одновибратора соединен с первым входом измерителя временных интервалов, с вторым входом второго одновибратора и с первым входом схемы совпадения, второй вход которой соединен с выходом второго одновибратора, а выход схемы совпадения через инвертор подключен к второму входу измерителя временных интервалов, выход которого соединен с вычислителем, выход которого связан с установочным входом измерителя временных интервалов. Магнитоиндукционные датчики установлены на трубе из немагнитного и неэлектропроводного материала и помещены в металлический кожух, причем корпус каждого из них выполнен из изоляционного материала, витки сигнальных обмоток датчиков изолированы от корпусов прокладкой из упругого неэлектропроводного материала.
Недостатком данного устройства является то, что обмотки магнитоиндукционных датчиков запитываются постоянным током большой величины при малых значениях пульсации напряжения, что накладывает ограничение на длину питающей линии к испытательной технике, что важно при испытаниях на участках пролета МО промежуточной и внешней баллистики при пулеосколочных испытаниях. Это приводит к значительным затратам на материалы, усложняет их изготовление и требует задействования мощных источников энергии.
Известны способ запуска регистрирующих систем и устройство определения скорости объекта, приведенные в описании патента РФ №2183837 «Способ определения частоты вращения снаряда по крену и снаряд для его реализации», МПК7 G01P 3/00, F42B 8/00, 12/00, F41J5/00, опубл. 20.06.2002, выбранные в качестве прототипа для заявляемых способа и устройства. Приведенный в указанном описании способ включает установку на траектории полета в начале и конце мерной базы индукционных устройств (например индукционных датчиков (соленоидов)) регистрации моментов времени прохождения снарядом (метаемым объектом (МО)) мерной базы, одно из которых запускает, а второе отключает хронометр, регистрацию времени прохождения снарядом мерной базы и последующее определение средней скорости снаряда математически.
Данный способ осуществляется путем установки мерной базы вдоль оси пролета снаряда, измерения мерной базы с помощью ручных измерительных инструментов (рулетки и т.п.).
Недостатком данного способа является то, что измерение расстояния между индукционными датчиками в мерной базе проводится непосредственно перед проведением испытаний путем замера ручными измерительными инструментами, что вносит погрешность и снижает точность измерения, а также низкая чувствительность индукционных датчиков не позволяет регистрировать пролет малоразмерных снарядов и определять их среднюю скорость. В заявленном устройстве измерения средней скорости индукционные датчики жестко установлены на мерной базе, исключающей необходимость замера расстояния между индукционными датчиками.
Технической задачей, на решение которой направлено заявляемое изобретение, является создание способа и устройства, обеспечивающих запуск регистрирующей аппаратуры с синхронизацией ее по пути в единой шкале времени проведения измерений и определение средней скорости пролета метаемым объектом мерной базы.
Технический результат - бесконтактная фиксация по времени местоположения МО в начале и конце мерной базы (времяпролетным способом), повышение надежности и точности хронографирования, снятие ограничений на длину питающей линии, поскольку заявляемое устройство при запитывании не требует мощных источников энергии.
Указанный технический результат достигается за счет того, что в заявляемом способе запуска регистрирующих систем, включающем установку по траектории полета метаемого объекта в начале и конце мерной базы индукционных датчиков, регистрацию моментов времени пролета объектом мерной базы, формирование сигнала на запуск хронографических регистрирующих систем после пролета метаемым объектом первого измерительного сечения, в отличие от прототипа индукционные датчики выполняют содержащими полесоздающее и полевоспринимающее устройства, установленные в измерительных сечениях напротив друг друга с возможностью пролета между ними метаемого объекта, в числе регистрирующих систем дополнительно запускают фотовидеорегистрирующую систему, которую размещают на расстоянии от второго измерительного сечения, равном или меньшем длины мерной базы.
Формирование сигнала на запуск фотовидеорегистрирующей системы производят с синхронизацией запуска по заданным координатам траектории полета метаемого объекта в единой шкале времени проведения измерений с задержкой по времени относительно импульса поджига заряда метательной установки, равной времени пролета метаемым объектом мерной базы.
Указанный технический результат достигается также за счет того, что в заявляемом измерителе средней скорости метаемого объекта, содержащем первый и второй индукционные датчики, регистрирующие момент времени пролета объектом первого и второго измерительных сечений мерной базы, электрически соединенные с первой и второй хронографическими регистрирующими системами, в отличие от прототипа датчики жестко закреплены в измерительных сечениях перпендикулярно направлению движения метаемого объекта в едином каркасе, выполненном с возможностью перемещения вдоль траектории полета метаемого объекта, каждый датчик выполнен содержащим полесоздающее и полевоспринимающее устройства, установленные напротив друг друга с возможностью пролета между ними метаемого объекта. При этом в измеритель дополнительно введены три схемы согласования, два формирователя импульсов, схема переключения режима, генератор тактовых импульсов, схема обнуления, схема совпадения «И», два расширителя импульсов, три выходных каскада, персональная вычислительная машина (ПЭВМ), цифровое табло, адаптер связи ПЭВМ, схема запуска.
Первое полевоспринимающее устройство, первый формирователь импульсов, первый расширитель импульсов, первый выходной каскад соединены последовательно и подключены к входу первой хронографической регистрирующей системы.
Второе полевоспринимающее устройство, второй формирователь импульсов, второй расширитель импульсов, второй выходной каскад соединены последовательно и подключены к входу второй хронографической регистрирующей системы.
Выход первого формирователя импульсов также подключен к входу первой схемы согласования, первый выход которой подключен к первому входу счетного устройства, а ее второй выход подключен к первому входу схемы переключения режима, выход которой подключен ко второму входу счетного устройства.
Схема запуска снабжена внешним входом «запуск», ее первый выход соединен с входом генератора тактовых импульсов, выход которого соединен с третьим входом счетного устройства, второй выход схемы запуска соединен с четвертым входом счетного устройства.
Выход второго формирователя импульсов также подключен к входу второй схемы согласования, первый выход которой соединен со вторым входом схемы переключения режима, а второй ее выход соединен с пятым входом счетного устройства.
Первый вход схемы обнуления является внешним входом сброса, ее второй вход соединен с выходом адаптера связи ПЭВМ, а выход схемы обнуления соединен с шестым входом счетного устройства, первый выход которого подключен к первому входу схемы совпадения «И», второй его выход подключен ко второму входу схемы совпадения «И», выход которой соединен с третьим выходным каскадом, выход которого предназначен для подключения к входу фотовидеорегистрирующей системы.
Третий выход счетного устройства подключен к входу третьей схемы согласования, группа входов-выходов которой двухсторонней линией связи соединена с соответствующей группой входов-выходов адаптера связи ПЭВМ. Выход третьей схемы согласования подключен к соответствующему входу цифрового табло, вход-выход адаптера связи ПЭВМ соединен с ответствующим входом-выходом ПЭВМ.
Цифровое табло установлено на том же каркасе, на котором размещены индукционные датчики.
Применение всей совокупности признаков заявляемых способа и устройства позволяет при пулеосколочных испытаниях обеспечить бесконтактную регистрацию моментов пролета метаемым объектом измерительных сечений, определяющих начало и конец мерной базы, что позволяет обеспечить измерение параметров МО без его отклонения от заданной траектории, а формирование сигнала на запуск фотовидеорегистрирующих систем с синхронизацией запуска по заданным координатам траектории полета метаемого объекта в единой шкале времени проведения испытаний с задержкой по времени относительно импульса поджига заряда метательной установки, равной времени пролета метаемым объектом мерной базы, позволяет повысить надежность и точность хронографирования на участке особенно высокоскоростного полета метаемого объекта.
Жесткое закрепление датчиков в измерительных сечениях перпендикулярно направлению движения метаемого объекта в едином каркасе, выполненном с возможностью перемещения вдоль траектории полета метаемого объекта, позволяет точно зафиксировать датчики и перемещать их в случае необходимости по баллистической трассе без трудоемкой переустановки, что повышает точность и надежность хронографирования.
Наличие схемы запуска, подключение ее первого выхода к входу генератора тактовых импульсов, а второго выхода - к четвертому входу счетного устройства обеспечивают одновременно блокировку счетного устройства и генератора тактовых импульсов от несанкционированного начала записи информации, а также синхронизируют работу этих устройств. Это обеспечивает синхронизацию запуска фотовидео- и хронографических регистрирующих систем по пути в единой шкале времени проведения измерений.
Установка цифрового табло на том же каркасе, на котором размещены индукционные датчики, позволяет отображать информацию о средней скорости пролета МО через измерительные сечения измерителя непосредственно в ходе проведения измерений.
Установка фотовидеорегистрирующей системы на участке от второго измерительного сечения равном или меньшем длины мерной базы независимо от скорости пролета МО, позволяет обеспечить измерение параметров МО, а также исключает необходимость проведения расчетов по определению точки установки фотовидеорегистрирующей системы на траектории пролета МО относительно расчетных данных скорости МО, что позволяет повысить надежность и точность измерения.
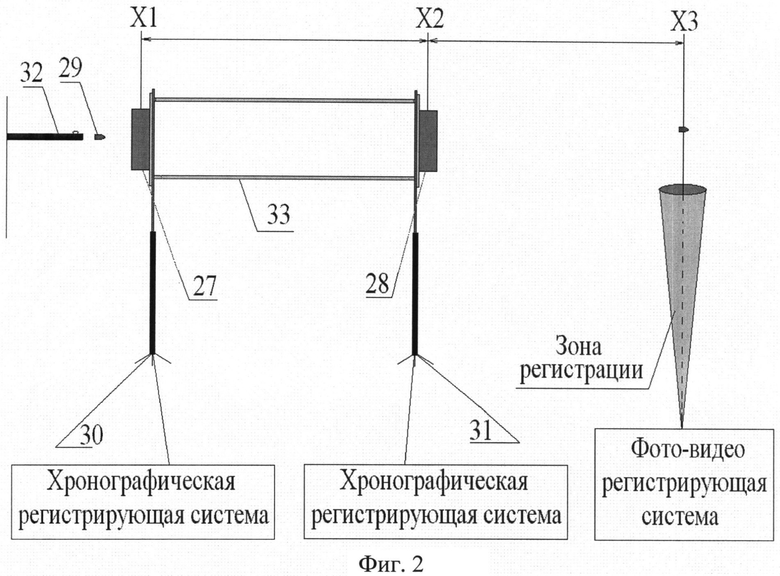
Заявляемые способ и устройство поясняются следующими фигурами: на фиг.1 приведена схема измерителя средней скорости метаемого объекта, на фиг.2 схематично показано размещение измерительных сечений мерной базы и регистрирующей аппаратуры на баллистической трассе для пулеосколочных испытаний.
Измеритель средней скорости метаемого объекта (Фиг.1) состоит из первого 27 и второго 28 индукционных датчиков, регистрирующих момент времени пролета метаемым объектом 29 первого 30 и второго 31 измерительных сечений мерной базы. Датчики 27 и 28 жестко закреплены в фиксирующих сечениях 30 и 31 перпендикулярно направлению движения МО в едином каркасе 33, выполненном с возможностью перемещения вдоль траектории полета метаемого объекта 29 (см. фиг.2). Каждый индукционный датчик 27, 28 выполнен содержащим полесоздающее (постоянный магнит) и полевоспринимающее (катушка индуктивности) устройства (1, 3 и 2, 4 соответственно), установленные в измерительных сечениях 30 и 31 напротив друг друга с возможностью пролета между ними метаемого объекта 29.
Измеритель средней скорости также содержит счетное устройство 11, первую 10, вторую 12 и третью 15 схемы согласования, первый 5 и второй 7 формирователи импульсов, схему переключения режима 6, генератор тактовых импульсов (ГТИ) 8, схему обнуления 9, схему совпадения «И» 14, первый и второй идентичные расширители импульсов 13, 16 соответственно, первый 17, второй 20 и третий 18 выходные каскады, ПЭВМ 23, адаптер связи ПЭВМ 19, цифровое табло 25 (для отображения скорости пролета МО через фиксирующие сечения).
Также в состав заявляемого измерителя входят схема запуска 26, регистрирующие первая 21 и вторая 24 хронографическая системы и фотовидеорегистрирующая система 22, в данном примере выполнения оптико-рентгеновская регистрирующая система.
Первое полевоспринимающее устройство 3, первый формирователь импульсов 5, первый расширитель импульсов 13, первый выходной каскад 17 соединены последовательно и подключены к входу первой хронографической регистрирующей системы 21.
Второе полевоспринимающее устройство 4, второй формирователь импульсов 7, второй расширитель импульсов 16, второй выходной каскад 20 соединены последовательно и подключены к входу второй хронографической регистрирующей системы 24.
Выход первого формирователя импульсов 5 также подключен к входу первой схемы согласования 10, первый выход которой подключен к первому входу счетного устройства 11, а ее второй выход подключен к первому входу схемы переключения режима 6, выход которой подключен ко второму входу счетного устройства 11.
Схема запуска 26 снабжена внешним входом «запуск», ее первый выход соединен с входом генератора тактовых импульсов 8, выход которого соединен с третьим входом счетного устройства 11, второй выход схемы запуска 26 соединен с четвертым входом счетного устройства 11.
Выход второго формирователя импульсов 7 подключен к входу второй схемы согласования 12, первый выход которой соединен со вторым входом схемы переключения режима 6, а второй ее выход соединен с пятым входом счетного устройства 11.
Первый вход схемы обнуления 9 является внешним входом сброса, ее второй вход соединен с выходом адаптера связи ПЭВМ 19, а выход схемы обнуления 9 соединен с шестым входом счетного устройства 11, первый выход которого подключен к первому входу схемы совпадения «И» 14, второй его выход подключен ко второму входу схемы совпадения «И» 14, выход которой через третий выходной каскад 18, выход которого предназначен для подключения к входу фотовидеорегистрирующей системы 22. Третий выход счетного устройства 11 подключен к входу третьей схемы согласования 15, группа входов-выходов которой двусторонней линией связи соединена с соответствующей группой входов-выходов адаптера связи ПЭВМ 19.
Выход третьей схемы согласования 15 подключен к соответствующему входу цифрового табло 25, вход-выход третьей схемы согласования 15 подключен двухсторонней линией связи к соответствующему входу-выходу адаптера связи ПЭВМ 19. Вход-выход адаптера связи 19 соединен с соответствующим входом-выходом ПЭВМ 23.
Заявляемый способ запуска регистрирующих систем осуществляется при работе заявляемого измерителя средней скорости метаемого объекта следующим образом.
При пролете метаемым объектом 29, вылетевшим из ствола 32 метательной установки через первое измерительное сечение (ИС) 30, в полесоздающем устройстве 1 вырабатывается сигнал, который далее принимается полевоспринимающим устройством 3, с которого поступает на первый формирователь импульсов 5. Первый формирователь импульсов 5 преобразует полученный сигнал в импульс прямоугольной формы ТТЛ уровня. Далее этот сигнал поступает в первый расширитель импульсов 13 и в первую схему согласования 10.
Первый и второй расширители импульсов 13 и 16 формируют длительность импульса до величины, необходимой для устойчивого запуска первой 21 и второй 24 хронографических регистрирующих систем (величина длительности импульса устанавливается исходя из технических характеристик сигналов запуска всех применяемых систем).
Далее с первого расширителя импульсов 5 сигнал поступает на первый выходной каскад 17, функцией которого является увеличение мощности запускающего сигнала, требуемого для надежного запуска первой хронографической регистрирующей системы 21. Одновременно с этим сигнал через схему согласования 10 поступает на счетное устройство 11.
Второе измерительное сечение работает аналогично первому.
При пролете метаемого объекта 29, вылетевшего из ствола 32 метательной установки через второе измерительное сечение 31, в полесоздающем устройстве 2 вырабатывается сигнал, который далее принимается полевоспринимающим устройством 4, с которого поступает на второй формирователь импульсов 7. Второй формирователь импульсов 7 преобразует полученный сигнал в импульс прямоугольной формы ТТЛ уровня. Далее этот сигнал поступает во второй расширитель импульсов 16 и во вторую схему согласования 12. С расширителя импульсов 16 сигнал поступает на второй выходной каскад 20, с которого далее поступает на вход второй хронографической регистрирующей системы 24. Одновременно с этим сигнал через вторую схему согласования 12 с ее второго выхода поступает на пятый вход счетного устройства 11.
Счетное устройство 11 работает следующим образом.
Счетное устройство 11 тактируется генератором тактовых импульсов 8 с частотой 4 МГц. При поступлении сигнала с полевоспринимающего устройства 3 первого измерительного сечения 30 через первый формирователь импульсов 5, через первую схему согласования 10 сигнал поступает на первый вход счетного устройства 11 и первый вход схемы переключения режима 6. Схема переключения режима 6 вырабатывает при этом сигнал начала записи. Поступление сигнала с полевоспринимающего устройства 3 соответствует времени t1. Далее ГТИ 8 начинает заполнять ячейки памяти счетного устройства 11 до момента прихода сигнала со второго полевоспринимающего устройства 4 через второй формирователь импульсов 7, через вторую схему согласования 12. Поступление сигнала на счетное устройство 11 со второго полевоспринимающего устройства 4 соответствует времени t2.
Сигнал с первого выхода второй схемы согласования 12 поступает на второй вход схемы переключения режима 6. Этот сигнал останавливает заполнение ячеек памяти и схема переключения режима 6 переводит счетное устройство 11 в режим считывания. При считывании информации из ячеек памяти счетного устройства 11 вырабатывается управляющий импульс, соответствующий времени прихода сигнала t2 со второго полевоспринимающего устройства 4 второго измерительного сечения, который поступает на первый вход схемы совпадения «И» 14.
Далее при считывании информации из ячеек памяти счетного устройства 11 вырабатывается второй управляющий импульс, соответствующий времени прихода сигнала t1 с первого полевоспринимающего устройства 3 первого измерительного сечения, и поступает на второй вход схемы совпадения «И» 14. С приходом сигнала на второй вход схемы совпадения «И» 14 схема вырабатывает управляющий импульс, по временной шкале равный Δt=Δt1+At2, который через третий выходной каскад 18 формирует сигнал на запуск фотовидеорегистрирующей системы 22. После этого счетное устройство 11 переходит в режим хранения информации.
Схема согласования 15 преобразует сигналы счетного устройства 11 в сигналы, необходимые для работы адаптера связи ПЭВМ 19. Адаптер связи ПЭВМ 19 осуществляет считывание информации из ячеек памяти счетного устройства 19 в системный блок ПЭВМ.
Одновременно схема согласования 15 осуществляет преобразование информации, полученной со счетного устройства 11, и подается в виде последовательности сигналов ТТЛ уровня на вход цифрового табло 25, где индицируется в значение средней скорости пролета МО через измерительные сечения 30 и 31. Таким образом, измеритель средней скорости метаемого объекта способен получать информацию о скорости как программным, так и аппаратным способом.
Схема обнуления 9 осуществляет процесс обнуления (сброс) всех ячеек памяти как при использовании ПЭВМ, так и в ручном режиме при подготовке заявляемого измерителя к регистрации. Ручной режим применяется при проведении подготовительных операций непосредственно перед началом пулеосколочных испытаний.
Схема запуска 26 обеспечивает одновременно блокировку счетного устройства 11 и генератора тактовых импульсов 8 от несанкционированного начала записи информации, а также синхронизирует работу этих устройств. Тем самым обеспечивается синхронизация запуска по пути в единой шкале времени измерителя и всех хронографических и фотовидеорегистрирующих системах.
За счет установки цифрового табло 25 на том же каркасе 33, на котором размещены индукционные датчики 27 и 28, обеспечивается непосредственное считывание и отображение значения скорости МО.
Таким образом решается техническая задача обеспечения запуска регистрирующей аппаратуры с синхронизацией ее по пути в единой шкале времени проведения измерений, определение средней скорости пролета метаемым объектом мерной базы и обеспечивается бесконтактная фиксация по времени местоположения МО в начале и конце мерной базы (времяпролетным способом), повышается надежность и точность хронографирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ВРЕМЕНИ ПРОЛЕТА МЕТАЕМЫМ ТЕЛОМ МЕРНОЙ БАЗЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2698531C1 |
| КОМБИНИРОВАННЫЙ СПОСОБ РЕГИСТРАЦИИ КОЛЕБАНИЙ ЦИЛИНДРИЧЕСКОЙ ОБОЛОЧКИ | 2021 |
|
RU2768109C1 |
| СПОСОБ ЗАПУСКА ПИРОТЕХНИЧЕСКИХ УСТРОЙСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2476712C1 |
| ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС РЕГИСТРАЦИИ И СИНТЕЗА РАДИОТЕХНИЧЕСКИХ СИГНАЛОВ | 2007 |
|
RU2351979C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК РАССЕИВАНИЯ СНАРЯДОВ ПРИ СТРЕЛЬБЕ ИЗ АРТИЛЛЕРИЙСКОГО ОРУЖИЯ И ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2568270C1 |
| АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ИСПЫТАНИЙ ИНТЕГРАЛЬНЫХ МИКРОСХЕМ НА РАДИАЦИОННУЮ СТОЙКОСТЬ | 2010 |
|
RU2435169C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ФОРМЫ СИГНАЛОВ ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1997 |
|
RU2111504C1 |
| Цифровой электромагнитный толщиномер | 1988 |
|
SU1839228A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ОБЪЕКТА | 1992 |
|
RU2046343C1 |
| АВТОМАТИЗИРОВАННЫЙ ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС ДЛЯ ЗАРЯДА И ТРЕНИРОВКИ АККУМУЛЯТОРНЫХ БАТАРЕЙ "ПРИЗМА" | 2007 |
|
RU2387054C2 |
Изобретение относится к испытательной технике, а именно к внешнетраекторной регистрации параметров пролета метаемого объекта (МО). Способ включает установку по траектории полета метаемого объекта в начале и конце мерной базы индукционных датчиков, регистрацию моментов времени пролета первого и второго измерительных сечений и времени пролета объектом мерной базы, формирование сигнала на запуск хронографических регистрирующих систем после пролета метаемым объектом первого измерительного сечения. Индукционные датчики выполняют содержащими полесоздающие и полевоспринимающие устройства, установленные в измерительных сечениях напротив друг друга с возможностью пролета между ними метаемого объекта, в числе регистрирующих систем дополнительно запускают фотовидеорегистрирующую систему, которую размещают на расстоянии от второго измерительного сечения, равном или меньшем длины мерной базы, а формирование сигнала на запуск фотовидеорегистрирующей системы производят с синхронизацией по заданным координатам траектории полета в единой шкале времени проведения измерений с задержкой по времени относительно импульса поджига заряда метательной установки, равной времени пролета метаемым объектом мерной базы. Измеритель состоит из первого 27 и второго 28 индукционных датчиков, регистрирующих момент времени пролета метаемым объектом 29 первого 30 и второго 31 измерительных сечений мерной базы. Датчики 27 и 28 жестко закреплены в фиксирующих сечениях 30 и 31 перпендикулярно направлению движения МО в едином каркасе 33, выполненном с возможностью перемещения вдоль траектории полета метаемого объекта 29. Каждый индукционный датчик 27, 28 выполнен содержащим полесоздающее (постоянный магнит) и полевоспринимающее (катушка индуктивности) устройства (1, 3 и 2, 4 соответственно), установленные в измерительных сечениях 30 и 31 напротив друг друга с возможностью пролета между ними метаемого объекта 29. Измеритель также содержит счетное устройство 11, первую 10, вторую 12 и третью 15 схемы согласования, первый 5 и второй 7 формирователи импульсов, схему переключения режима 6, генератор тактовых импульсов 8, схему обнуления 9, схему совпадения «И» 14, первый 13 и второй 16 идентичные расширители импульсов, первый 17, второй 20 и третий 18 выходные каскады, адаптер связи ПЭВМ 19, цифровое табло 25 (для отображения скорости пролета МО через фиксирующие сечения), ПЭВМ 23. Технический результат заключается в повышении надежности и точности хронографирования. 2 н. и 1 з.п. ф-лы, 2 ил.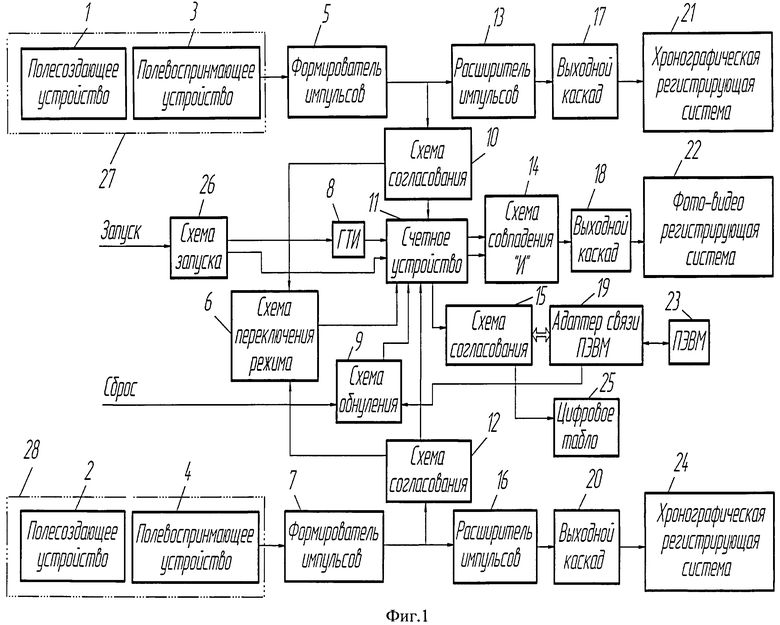
1. Способ запуска регистрирующих систем, включающий установку по траектории полета метаемого объекта в начале и конце мерной базы индукционных датчиков, регистрацию моментов времени пролета объектом мерной базы, формирование сигнала на запуск хронографических регистрирующих систем после пролета метаемым объектом первого измерительного сечения, отличающийся тем, что индукционные датчики выполняют содержащими полесоздающее и полевоспринимающее устройства, установленные в измерительных сечениях напротив друг друга с возможностью пролета между ними метаемого объекта, в числе регистрирующих систем дополнительно запускают фотовидеорегистрирующую систему, которую размещают на расстоянии от второго измерительного сечения, равном или меньшем длины мерной базы, при этом формирование сигнала на запуск фотовидеорегистрирующей системы производят с синхронизацией запуска по заданным координатам траектории полета метаемого объекта в единой шкале времени проведения измерений с задержкой по времени относительно импульса поджига заряда метательной установки, равной времени пролета метаемым объектом мерной базы.
2. Измеритель средней скорости метаемого объекта, содержащий первый и второй индукционные датчики, регистрирующие момент времени пролета объектом первого и второго измерительных сечений мерной базы, электрически соединенные с первой и второй хронографическими регистрирующими системами, отличающийся тем, что датчики жестко закреплены в измерительных сечениях перпендикулярно направлению движения метаемого объекта в едином каркасе, выполненном с возможностью перемещения вдоль траектории полета метаемого объекта, каждый датчик выполнен содержащим полесоздающее и полевоспринимающее устройства, установленные напротив друг друга с возможностью пролета между ними метаемого объекта, при этом в измеритель дополнительно введены три схемы согласования, два формирователя импульсов, схема переключения режима, генератор тактовых импульсов, схема обнуления, схема совпадения «И», два расширителя импульсов, три выходных каскада, персональная вычислительная машина (ПЭВМ), адаптер связи с ПЭВМ, цифровое табло, схема запуска; первое полевоспринимающее устройство, первый формирователь импульсов, первый расширитель импульсов, первый выходной каскад соединены последовательно и подключены к входу первой хронографической регистрирующей системы, второе полевоспринимающее устройство, второй формирователь импульсов, второй расширитель импульсов, второй выходной каскад соединены последовательно и подключены к входу второй хронографической регистрирующей системы, выход первого формирователя импульсов также подключен к входу первой схемы согласования, первый выход которой подключен к первому входу счетного устройства, а ее второй выход подключен к первому входу схемы переключения режима, выход которой подключен ко второму входу счетного устройства, схема запуска снабжена внешним входом «запуск», ее первый выход соединен с входом генератора тактовых импульсов, выход которого соединен с третьим входом счетного устройства, второй выход схемы запуска соединен с четвертым входом счетного устройства, выход второго формирователя импульсов также подключен к входу второй схемы согласования, первый выход которой соединен со вторым входом схемы переключения режима, а второй ее выход соединен с пятым входом счетного устройства, первый вход схемы обнуления является внешним входом сброса, ее второй вход соединен с выходом адаптера связи с ПЭВМ, а выход схемы обнуления соединен с шестым входом счетного устройства, первый выход которого подключен к первому входу схемы совпадения «И», второй его выход подключен ко второму входу схемы совпадения «И», выход которой соединен с третьим выходным каскадом, выход которого предназначен для подключения к входу фотовидеорегистрирующей системы, третий выход счетного устройства подключен к входу третьей схемы согласования, группа входов-выходов которой двухсторонней линией связи соединена с соответствующей группой входов-выходов адаптера связи с ПЭВМ, выход третьей схемы согласования подключен к соответствующему входу цифрового табло, вход-выход адаптера связи с ПЭВМ соединен с ответствующим входом-выходом ПЭВМ.
3. Измеритель средней скорости метаемого объекта по п.2, отличающийся тем, что цифровое табло установлено на том же каркасе, на котором размещены индукционные датчики.
| СПОСОБ ОПРЕДЕЛЕНИЯ ЧАСТОТЫ ВРАЩЕНИЯ СНАРЯДА ПО КРЕНУ И СНАРЯД ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2183837C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ПОЛЕТА ПУЛИ И СНАРЯДА | 1991 |
|
RU2089917C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ПРОВОДЯЩЕЙ ПУЛИ | 2001 |
|
RU2184978C1 |
| US 6388438 B1 14.05.2002 | |||
| 0 |
|
SU158165A1 | |

