Изобретение относится к контрольно-измерительной технике и может быть использовано для измерения линейной скорости технологических и транспортных объектов, а также при проведении баллистических экспериментов.
Известно устройство, содержащее измеритель временных интервалов, вычислитель и продольный датчик пролета, составленный из источника и приемника излучения, которые оптически согласованы через многопроходовый оптический резонатор, включающий N отражателей, установленных попарно встречно по обеим сторонам продольной оси резонатора [1]
Недостатком известного устройства является низкая точность определения величины скорости объекта на мерном интервале трассы при малых поперечных размерах объекта и при ощутимом угловом разбросе направления скоростей при пролетах объектами заданного базового расстояния при многократных пусках и измерениях скоростей на фиксированном мерном интервале трассы.
Наиболее близким по технической сущности и достигаемому результату является устройство для измерения скорости объекта, содержащее размещенные на концах мерного участка трассы две опорные рамки с горизонтальными и вертикальными стенками, связанными с координатными осями, источники излучения и N приемников излучения, расположенных на каждой горизонтальной и вертикальной сторонах рамки, причем все приемники излучения связаны через аналого-цифровые преобразователи с вычислителем [2]
В известном устройстве определяется пробиваемая снарядом площадь в мишенной плоскости с лучевыми сетками с использованием множества вертикальных и горизонтальных лучей, координаты которых невозможно использовать для однозначного определения вектора скорости.
Цель изобретения определение вектора скорости объекта.
Цель достигается тем, что в устройство, содержащее размещенные на концах мерного участка трассы две опорные рамки с горизонтальными и вертикальными стенками, связанными с координатными осями, источники излучения и N приемников излучения, расположенных на каждой горизонтальной и вертикальной сторонах рамки, причем все приемники излучения связаны через аналого-цифровые преобразователи с вычислителем, введены полупрозрачные зеркала, установленные на горизонтальных и вертикальных сторонах каждой рамки, пара зеркал вдоль каждой из координатных осей направлена навстречу друг другу и снабжена одним источником излучения, а N приемников излучения установлены за каждым полупрозрачным зеркалом.
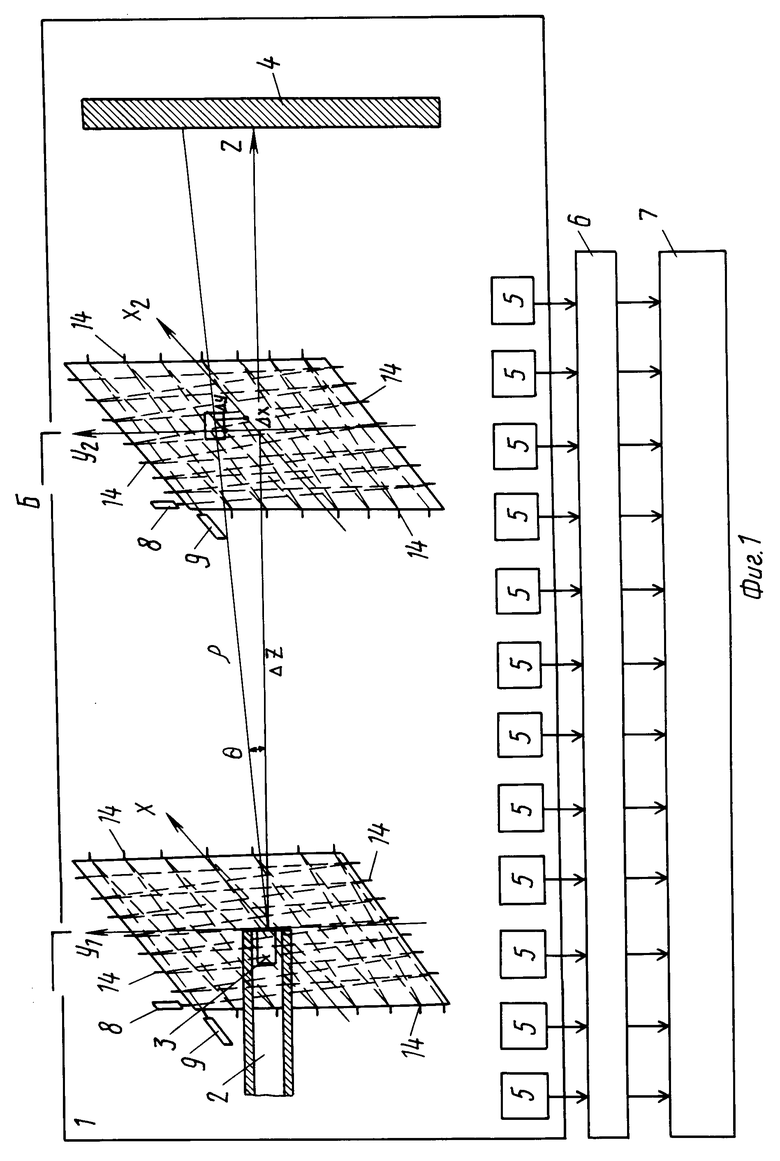
На фиг. 1 представлена обобщенная функциональная схема устройства; на фиг.2 детальная функциональная схема.
Согласно фиг. 1 в баллистической трассе 1 соосно продольной оси z установлены гиперскоростной ускоритель 2, объект 3, мишень 4. В сечениях А и Б трассы полета объекта 3 вдоль оси z введены нормальные оси трассы z поперечные координатные плоскости х1у1 в точке продольной оси z1 и х2у2 в точке продольной оси z2. Таким образом, продольный отрезок оси Δ z=z2-z1 образует мерный интервал трассы, на котором определяется скорость объекта 3. Пролет объекта в каждом сечении А и Б контролируют поперечные датчики 5. В общем случае в поперечном сечении А на фиг.1 установлены датчики 5, фиксирующие координаты D(z1), D(x1), D(-x1), D(y1), D(-y1) и время D(t1), а в поперечном сечении Б на фиг. 1 установлены датчики 5, фиксирующие координаты D(z2), D(x2), D(-x2), D(y2), D(-y2) и время D(t2). Так как продольный отрезок оси Δ z= z2-z1 образует мерный интервал трассы и заранее известен, то координаты z1, z2 и отрезок Δ z вводятся в измеритель скорости для самокалибровки и контроля их преобразования в многоканальном измерителе 6 временных интервалов (ИВИ), к которому подключены выходы всех датчиков, и для контроля расчета исследуемых величин в вычислителе 7, к которому подключены выходы ИВИ 6.
По-существу, многоканальный ИВИ 6 осуществляет аналого-цифровое преобразование информации датчиков 5 в такую форму, которая удобна для вычислителя 7 при определении приращений Δ t, Δ x, Δ y, Δ z и при их последующем использовании в вычислителе 7 для расчета фактического расстояния ρ по формуле ρ  модуля вектора скорости на мерном интерва- ле трассы по формуле
модуля вектора скорости на мерном интерва- ле трассы по формуле 
 и для расчета фактического угла θ между вектором скорости
и для расчета фактического угла θ между вектором скорости  , и осью трассы z по формуле θ arccos
, и осью трассы z по формуле θ arccos  т.е. для определения ориентации вектора скорости на мерном интервале трассы.
т.е. для определения ориентации вектора скорости на мерном интервале трассы.
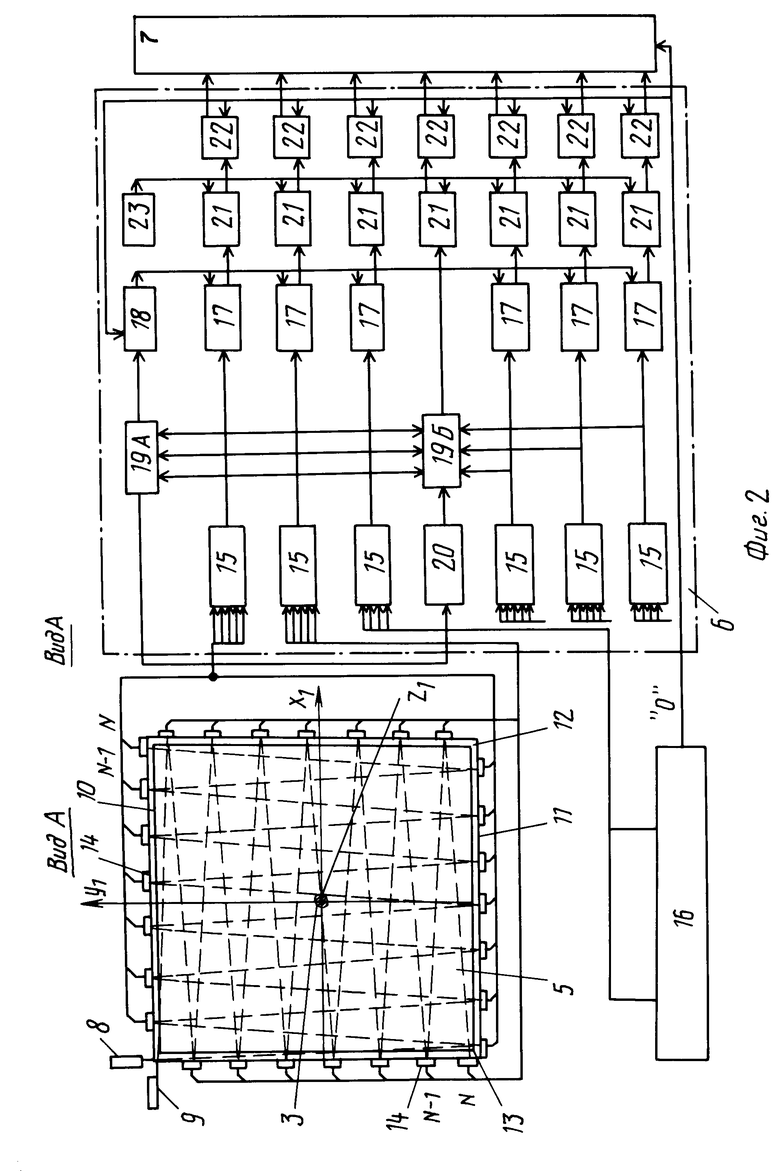
Более детально функционирование устройства для измерения вектора скорости объекта иллюстрирует фиг.2, на которой более подробно представлены принципиальная схема одного из координатных датчиков 5 и функциональная схема многоканального аналого-цифрового преобразователя ИВИ 6, связанного с вычислителем 7.
Датчик 5 на фиг.2 размещен в сечении А на нормальной к оси плоскости. В этой плоскости проведены координатные оси х1, у1, пересекающиеся на оси z. Таким образом, в начале мерного интервала трассы нормально оси трассы задана поперечная координатная плоскость. Лучевая сетка этой координатной плоскости сформирована двумя излучателями 8 и 9 остронаправленного зондирующего излучения. Направление излучения на выходе каждого излучателя ориентировано под фиксированным углом к соответствующим координатным осям. Параллельно оси х, попарно встречно друг другу по обеим сторонам оси установлены полупрозрачные зеркала 10 и 11, а параллельно оси у аналогично установлены полупрозрачные зеркала 12 и 13. За каждым из полупрозрачных зеркал размещено N приемников 14 остронаправленного зондирующего излучения. При этом луч от излучателя 8, многократно отражаясь от полупрозрачных зеркал 10 и 11 и пересекая после каждого отражения ось х1, формирует многопроходную лучевую сетку для фиксации координаты х1 при пролете объекта 3 через некоторую точку сечения А после прерывания в этой точке из-за экранирования объектом многопроходного остронаправленного зондирующего луча, согласованного с осью х1. Аналогично луч от излучателя 9, многократно отражаясь от другой пары полупрозрачных зеркал 12 и 13 и пересекая после каждого отражения ось у1, формирует лучевую сетку для фиксации координаты у1 объекта 3 при его пролете через сечение А баллистической трассы. В результате прерывания в некоторой точке сечения А из-за экранирования объектом многопроходового остронаправленного зондирующего луча на координатной плоскости х1у1 осуществляется фиксация координат х1оу1о той парой приемников 14 из множества 4N, в которые не попали лучи от излучателей 8 и 9 вследствие их экранирования в точке х1оу1о пролетающим через сечение А объектом 3.
Аналогично осуществляется фиксация координат х2у2 при пролете объекта 3 через сечение Б баллистической трассы (на фиг.2 не показано). По прерыванию лучей в каждой координатной плоскости фиксируются моменты времени пересечения объектом 3 мерного интервала трассы между сечениями А и Б, что позволяет определить с большой точностью время пролета объектом 3 мерного интервала трассы, а также величину и направление вектора скорости объекта 3 на этом интервале после аналого-цифрового преобразования полученной информации в многоканальном ИВИ 6.
Многоканальный ИВИ 6 содержит входные устройства 15, преобразующие информацию приемников излучения, связанных с координатными осями х1у1; х2у2, в напряжение, пропорциональное положению приемника 14 относительно соответствующей координатной оси. Входные устройства 15 для координаты z для заданных сечений А и Б связаны с фиксированными точками на оси z. При идентичном исполнении многоканальные входы этих устройств могут быть использованы для контрольных проверок, самокалибровки и для передачи другой служебной информации, например, из блока контроля и управления 16, предназначенного для установки "0", синхронизации, калибровки и т.п. Выход каждого входного устройства 15 подключен к компаратору 17, второй вход которого связан с генератором линейно изменяющегося напряжения (ГЛИН) 18. Запуск ГЛИН 18 осуществляется через схему ИЛИ 19 А при появлении напряжения на любом из выходов устройств 15, связанных с координатной плоскостью х1у1 в сечении А.
По существу момент появления сигналов на выходах устройств 15, связанных с приемниками излучений 14 для координат х1 и у1, свидетельствует о первоначальном прерывании в сечении А многопроходового зондирующего луча вследствие его экранировки объектом 3 на входе мерного интервала трассы. Поэтому этот момент фиксируется как начало измеряемого на этом мерном интервале промежутка времени. Конец этого промежутка времени фиксируется при пересечении объектом 3 сечения Б баллистической трассы по моменту прерывания объектом 3 многопроходового зондирующего луча на координатной плоскости х2у2 и по появлению вследствие этого сигнала на соответствующих выходах приемников излучения 14, связанных с осями х2 и у2 (на фиг.2 не показано), которые через входные устройства 15 для координат х2 и y2 выведены на входы схемы ИЛИ 19 Б. Связанная с ИЛИ 19 Б линия задержки (ЛЗ) 20 блокирует появление ложных сигналов на входе ИЛИ 19Б на минимальное время Δ τ пролета объектом 3 мерного участка трассы и обеспечивает помехоустойчивость измерения промежутка времени Δ tизм ≥ Δ τ на мерном интервале трассы.
На основании вышеизложенного схема ИЛИ 19Б пропускает на вход временного селектора-формирователя стробирующего импульса 21 сначала сигналы с выходов устройств 15 для преобразования координат х1у1z1, а затем по истечении времени Δ τ сигналы с выходов устройств 15 для преобразования координат х2у2z2. Временной селектор-формирователь стробирующего импульса 21 управляет заполнением тактовых (счетных) импульсов в счетчик 22, связанный с генератором счетных импульсов 23. При этом временной селектор выполняет функцию логического элемента И, так как пропускает счетные импульсы на вход счетчика 22 только в течение времени действия стробирующего импульса, сформированного из исследуемого (измеряемого) сигнала, например, с помощью триггера Шмитта. Поэтому можно считать, что временной селектор 21 осуществляет промежуточное преобразование исследуемого сигнала в импульс, ширина которого пропорциональна измеряемому сигналу, а в счетчике 22 исследуемый сигнал преобразуется в универсальный цифровой вид, воспринимаемый для переработки вычислителем 7. Аналогичную функцию выполняют остальные временные селекторы 21, преобразующие информацию о координатах х1у1z1x2y2z2 в пропорциональные широтно-модулированные импульсы (импульсы ШИМ), которые управляют уровнем заполнения своих счетчиков 22 и формируют тем самым цифровой код координат для их дальнейшей обработки в вычислителе 7. При этом на вход координатных временных селекторов поступает стробирующий импульс от компараторов 17, который начинается в момент запуска ГЛИН 18, а завершается в момент сравнения линейно изменяющегося напряжения ГЛИН на одном входе компаратора 17 с уровнем напряжения соответствующего входного устройства 15, поданного на второй вход компаратора 17.
Таким образом, в счетчиках формируется цифровой код для величин Δ t, x1, y1, z1, x2, y2, z2. Поступление этих величин в вычислитель 7 по известным алгоритмам позволяет вычислить интервалы Δ х, Δ у,Δ z и определить фактическое базовое значение пролета объекта 3 между сечениями А и Б баллистической трассы по формуле
ρ  , знание ρ позволяет вычислить модуль вектора скорости на мерном интервале
, знание ρ позволяет вычислить модуль вектора скорости на мерном интервале 

 и угол вектора скорости относительно оси z по формуле θ arccos
и угол вектора скорости относительно оси z по формуле θ arccos  arccos
arccos  .
.
Знание характерного размера а объекта 3 позволяет сформулировать требование на допустимое угловое расхождение α после отражения от полупрозрачного зеркала остронаправленного зондирующего луча из условия прерывания луча объектом 3 в наиболее невыгодных условиях. При расстоянии между полупрозрачными зеркалами L должно быть a>h 2Ltg  где h расстояние между приемниками излучения; α угловое расхождение падающего и отраженного лучей.
где h расстояние между приемниками излучения; α угловое расхождение падающего и отраженного лучей.
Таким образом, предложенное изобретение позволяет с прогнозируемой точностью зафиксировать в аналоговом и цифровом виде как время пролета тела малых размеров мерного интервала баллистической трассы, так и координаты тела (объекта) в сечениях баллистической трассы на концах мерного интервала, а также определить по полученным данным величину и направление вектора скорости объекта на мерном интервале.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения скорости линейного перемещения объекта | 1987 |
|
SU1569714A1 |
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2100745C1 |
| СПЕКТРАЛЬНЫЙ УПЛОТНИТЕЛЬ-ДЕЛИТЕЛЬ КАНАЛОВ С ДИФРАКЦИОННОЙ РЕШЕТКОЙ | 1991 |
|
RU2018162C1 |
| Способ определения местоположения работающей РЛС пассивным многолучевым пеленгатором | 2019 |
|
RU2741333C1 |
| ГЛУШИТЕЛЬ ЗВУКА ВЫСТРЕЛА | 1994 |
|
RU2089815C1 |
| СПОСОБ И УСТРОЙСТВО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ ПО УГЛОВЫМ НАПРАВЛЕНИЯМ В ОБЗОРНЫХ РЛС | 2011 |
|
RU2480782C1 |
| Способ определения местоположения обзорной РЛС пассивным пеленгатором | 2018 |
|
RU2741331C2 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2019 |
|
RU2717362C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭФЕМЕРИДНОЙ ИНФОРМАЦИИ В АППАРАТУРЕ ПОТРЕБИТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2460970C1 |
| ЗЕРКАЛЬНОЕ АНТЕННОЕ УСТРОЙСТВО | 2001 |
|
RU2206158C2 |
Использование: в контрольно-измерительной технике для измерения линейной скорости технологических и транспортных объектов, при проведении баллистических экспериментов. Сущность изобретения: устройство для измерения скорости объекта включает измеритель временных интервалов, вычислитель скорости объекта и связанные с ними размещенные в начале и конце мерного интервала трассы излучателя и приемники остронаправленного зондирующего излучения. В начале и в конце мерного интервала трассы в фиксирующих пролет объекта сечениях ортогонально продольной оси трассы введены координатные оси и связанные с ними лучевые сетки, при этом в каждом сечении параллельно координатным осям попарно встречно друг другу по обеим сторонам продольной оси трассы установлены полупрозрачные зеркала, за каждым из которых расположены N приемников остронаправленного зондирующего излучения. Кроме того, за каждой сопряженной парой зеркал размещен излучатель, зондирующий луч которого в процессе отражения и прохождения через сопряженные пары полупрозрачных зеркал последовательно соединяет расположенные за этими зеркалами ZN приемников, выходы которых через многоканальный измеритель выходных интервалов подключены к вычислителю вектора скорости объекта. Устройство позволяет с прогнозируемой точностью зафиксировать в аналоговом и цифровом виде как время пролета, так и координаты объекта, а также определить величину и направление вектора скорости объекта на мерном интервале. 2 ил.
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ОБЪЕКТА, содержащее размещенные на концах мерного участка трассы две опорные рамки с горизонтальными и вертикальными стенками, связанными с координатными осями, источники излучения и N приемников излучения, расположенных на каждой горизонтальной и вертикальной сторонах рамки, причем все приемники излучения связаны через аналого-цифровые преобразователи с вычислителем, отличающееся тем, что в него введены полупрозрачные зеркала, установленные на горизонтальных и вертикальных сторонах каждой рамки, пара зеркал вдоль каждой из координатных осей направлена навстречу друг другу и снабжена одним источником излучения, а N приемников излучения установлены за каждым полупрозрачным зеркалом.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США N 3727069, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
