Изобретение относится к ветроэнергетике, а именно к ветроэнергетическим генераторам с осью вращения ротора, не совпадающей с направлением ветра, и может быть использовано для преобразования энергии ветра в электрическую энергию.
Известен способ автоматического управления крылом ветродвигателя с вертикальной осью вращения с крыльями симметричного профиля, закрепленными на радиальных траверсах шарнирно (Патент РФ №2307951, F03D 3/00, F03D 7/06, 2006 г.), заключающийся в механическом ограничении угла их поворота и смещении оси шарнира по хорде крыла в сторону его носка, причем центр тяжести крыла смещают на перпендикуляр к хорде крыла, проходящий через ось шарнира на внешнюю от центра вращения ротора сторону.
Недостатком данного способа является низкая эффективность, обусловленная невозможностью пространственного расположения крыльев, не создающих под действием ветрового напора крутящий момент относительно вертикальной оси ветродвигателя, с минимальным аэродинамическим сопротивлением.
Известен также способ формирования ветродвигателя (Патент РФ №2349793, F03D 3/00, 2006 г.), заключающийся в расположении лопастей ротора ветряка, создающих под действием ветрового напора крутящий момент относительно вертикальной оси ротора ветряка, с максимальным аэродинамическим сопротивлением и в расположении лопастей ротора ветряка, не создающих под действием ветрового напора крутящий момент относительно вертикальной оси ротора ветряка, с минимальным аэродинамическим сопротивлением.
Недостаток данного способа объясняется сложностью его реализации и значительными потерями мощности, что связано с необходимостью механического регулирования расположения лопастей ротора ветряка, снижающего также и надежность работы ветряка.
Технический результат предлагаемого способа заключается в повышении эффективности и надежности функционирования ветряка.
Технический результат достигается тем, что в способе управления лопастями ротора ветряка с вертикальной осью вращения, заключающемся в расположении лопастей ротора ветряка, создающих под действием ветрового напора крутящий момент относительно вертикальной оси ротора, с максимальным аэродинамическим сопротивлением и в расположении лопастей ротора ветряка, не создающих под действием ветрового напора крутящий момент относительно вертикальной оси ротора, с минимальным аэродинамическим сопротивлением, причем каждую лопасть ротора оснащают вертикальной осью лопасти и фиксатором положения, при этом устанавливают лопасть на вертикальную ось лопасти в подшипниковом узле вращения со смещением относительно оси равновесия таким образом, что результирующий вращающий момент лопасти ротора под действием ветрового напора не равен нулю, фиксируют пространственное положение лопасти в момент начала создания данной лопастью крутящего момента относительно вертикальной оси ротора, а снимают фиксацию пространственного положения лопасти при прекращении создания данной лопастью крутящего момента относительно вертикальной оси ротора и переводят данную лопасть в состояние флюгирования.
На фиг.1 приведена схема (вид сверху) устройства, реализующего предлагаемый способ управления лопастями ротора ветряка с вертикальной осью вращения.
Устройство содержит ротор ветряка 1, имеющий возможность вращения относительно вертикальной оси 2 в подшипниковом узле вращения и передачи мощности 3.
По окружности ротора ветряка 1 равномерно размещены лопасти ротора 4.
Каждая лопасть ротора 4 установлена на вертикальной оси лопасти 5, смещенной от оси равновесия на лопасти ротора 4, относительно которой результирующий вращающий момент лопасти ротора 4 под действием ветрового напора равен нулю, с возможностью вращения лопасти ротора 4 относительно вертикальной оси лопасти 5 в подшипниковом узле вращения 6 и оснащена фиксатором положения 7 положения лопасти ротора 4.
Фиксатор положения 7 фиксирует лопасть ротора 4, обеспечивая ее ориентацию по радиусу ротора ветряка 1, а после снятия фиксации лопасть ротора 4 автоматически переходит в состояние флюгирования с ориентацией по ветру за счет неравенства нулю результирующего вращающего момента лопасти ротора 4 под действием ветрового напора.
Способ осуществляется следующим образом.
Под действием ветрового напора зафиксированные фиксатором положения 7 в положении с максимальным аэродинамическим сопротивлением лопасти ротора 4 создают крутящий момент относительно вертикальной оси 2 ротора ветряка 1.
При достижении крайней точки подветренной стороны ветряка лопасть ротора 4 перестает развивать крутящий момент относительно вертикальной оси 2 ротора ветряка 1, поэтому на ее фиксатор положения 7 поступает команда на снятие фиксации лопасти ротора 4. В результате лопасть ротора 4 получает возможность свободного вращения относительно вертикальной оси лопасти 5 в подшипниковом узле вращения 6. Вследствие смещения вертикальной оси лопасти 5 от оси равновесия на лопасти ротора 4, относительно которой результирующий вращающий момент лопасти ротора 4 под действием ветрового напора равен нулю, возникающий не равный нулю результирующий вращающий момент разворачивает лопасть ротора 4 относительно вертикальной оси лопасти 5 во флюгирующее положение с минимальным аэродинамическим сопротивлением.
Флюгирующее состояние лопасти ротора ветряка 4 сохраняется до достижения ею крайней точки наветренной стороны ветряка, где фиксатор положения 7 вновь осуществляет по команде фиксацию лопасти ротора 4.
Останов ветряка, например, при сверхнормативных по скорости ветрах производится снятием фиксации лопастей ротора 4, создающих крутящий момент относительно вертикальной оси 2 ротора ветряка 1, в результате чего все лопасти ротора 4 оказываются во флюгирующем состоянии и не создают крутящий момент относительно вертикальной оси 2 ротора ветряка 1.
Запуск в работу ветряка производится его принудительным вращением, например, с помощью перевода генератора ветряка (не показан на чертеже) в двигательный режим с питанием его от аккумулятора (не показан на чертеже) для обеспечения начала фиксации лопастей ротора 4 с последующим созданием ими крутящего момента относительно вертикальной оси 2 ротора ветряка 1. Ветряк при этом не требует ориентации по ветру.
Крайние точки подветренной и наветренной сторон ветряка определяются датчиком направления ветра (не показан на чертеже) во взаимосвязи с двумя диаметрально расположенными относительно вертикальной оси 2 ротора ветряка 1 датчиками положения ротора ветряка 1 (не показаны на чертеже).
Таким образом, реализация предложенного способа позволяет обеспечить высокие эффективность и надежность функционирования ветряка.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления положением лопастей лопастной системы ветроэлектростанции | 2019 |
|
RU2710107C1 |
| Лопастная система ветроэлектростанции | 2019 |
|
RU2724359C1 |
| КРЫЛО (ЛОПАСТЬ) С САМОУСТАНОВКОЙ УГЛА АТАКИ К НАПРАВЛЕНИЮ НАБЕГАЮЩЕГО ПОТОКА СРЕДЫ | 1998 |
|
RU2141059C1 |
| Устройство ветродвигателя, содержащего лопастные винты разного диаметра, расположенные в параллельных вертикальных плоскостях на общей оси вращения от винта малого диаметра к следующему винту большего диаметра относительно предыдущего с зазором между ними | 2016 |
|
RU2654662C1 |
| ВЕРТИКАЛЬНЫЙ ВЕТРОДВИГАТЕЛЬ С КОЛЕБЛЮЩИМИСЯ ЛОПАСТЯМИ | 2015 |
|
RU2663963C2 |
| ГОРИЗОНТАЛЬНО-ТУРБИННЫЙ ВЕТРОГЕНЕРАТОР | 2011 |
|
RU2453727C1 |
| РОТОР ВЕРТИКАЛЬНО-ОСЕВОГО ВЕТРОДВИГАТЕЛЯ | 1992 |
|
RU2034169C1 |
| СКЛАДЫВАЕМАЯ ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2018 |
|
RU2703590C1 |
| ВЕТРОЭНЕРГОУСТАНОВКА | 1995 |
|
RU2087744C1 |
| ВЕТРОСОЛНЕЧНАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2022 |
|
RU2802563C1 |
Изобретение относится к ветроэнергетике. Способ управления лопастями ротора ветряка с вертикальной осью вращения заключается в расположении лопастей ротора ветряка, создающих под действием ветрового напора крутящий момент относительно вертикальной оси ротора, с максимальным аэродинамическим сопротивлением и в расположении лопастей ротора ветряка, не создающих под действием ветрового напора крутящий момент относительно вертикальной оси ротора, с минимальным аэродинамическим сопротивлением. Каждую лопасть ротора оснащают вертикальной осью лопасти и фиксатором положения. Устанавливают лопасть на вертикальную ось лопасти в подшипниковом узле вращения со смещением относительно оси равновесия таким образом, что результирующий вращающий момент лопасти ротора под действием ветрового напора не равен нулю. Фиксируют пространственное положение лопасти в момент начала создания данной лопастью крутящего момента относительно вертикальной оси ротора. Снимают фиксацию пространственного положения лопасти при прекращении создания данной лопастью крутящего момента относительно вертикальной оси ротора и переводят данную лопасть в состояние флюгирования. Изобретение направлено на повышение эффективности и надежности ветряка. 1 ил.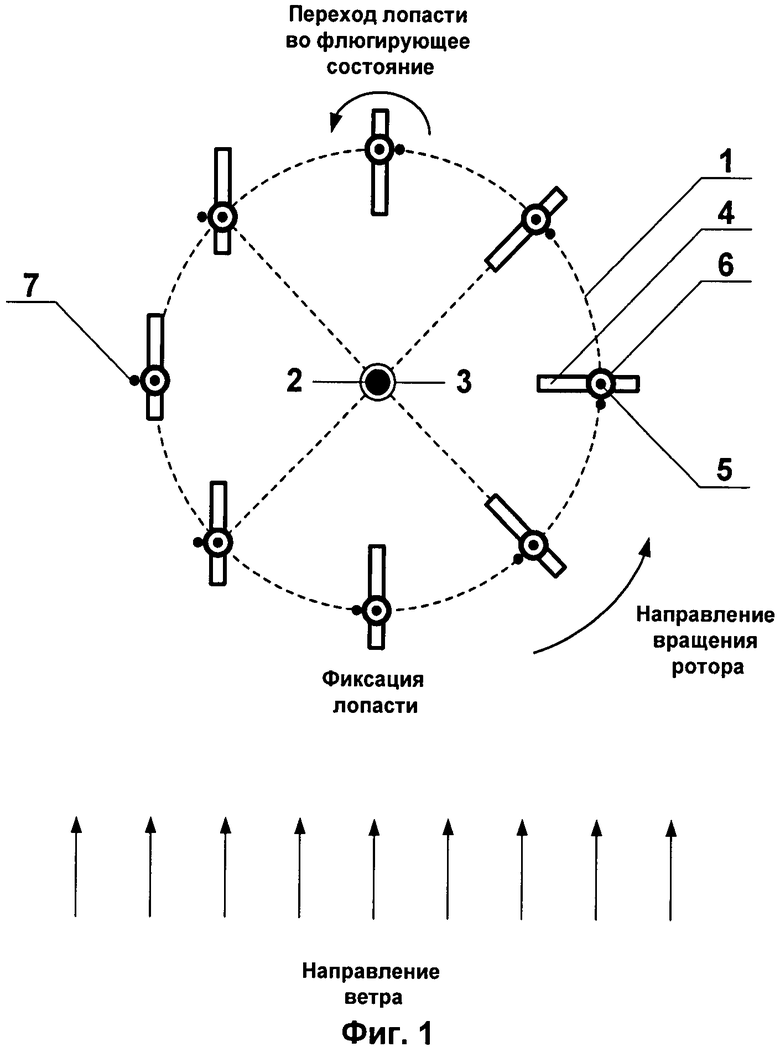
Способ управления лопастями ротора ветряка с вертикальной осью вращения, заключающийся в расположении лопастей ротора ветряка, создающих под действием ветрового напора крутящий момент относительно вертикальной оси ротора, с максимальным аэродинамическим сопротивлением и в расположении лопастей ротора ветряка, не создающих под действием ветрового напора крутящий момент относительно вертикальной оси ротора, с минимальным аэродинамическим сопротивлением, отличающийся тем, что каждую лопасть ротора оснащают вертикальной осью лопасти и фиксатором положения, при этом устанавливают лопасть на вертикальную ось лопасти в подшипниковом узле вращения со смещением относительно оси равновесия таким образом, что результирующий вращающий момент лопасти ротора под действием ветрового напора не равен нулю, фиксируют пространственное положение лопасти в момент начала создания данной лопастью крутящего момента относительно вертикальной оси ротора, а снимают фиксацию пространственного положения лопасти при прекращении создания данной лопастью крутящего момента относительно вертикальной оси ротора и переводят данную лопасть в состояние флюгирования.
| Ветродвигатель | 1990 |
|
SU1799431A3 |
| СПОСОБ ФОРМИРОВАНИЯ ВЕТРОДВИГАТЕЛЯ | 2006 |
|
RU2349793C2 |
| US 4818888 A, 04.04.1989 | |||

