Изобретение относится к области энергетических силовых установок, использующих энергию потока среды и преобразующих ее в механическую энергию, а также к области движетелей и может быть использовано как жесткое парус-крыло, ветродвигатель, гидродвигатель и др.
Известен ветроэлектрический агрегат по авторскому свидетельству СССР N 1442692 /1/, содержащий установленный на вертикальном валу ротор с поворотными лопастями на горизонтальных несущих траверсах. Устройство поворота крыльев включает в себя тяги, попарно присоединенные одними концами к лопастям, при этом устройство поворота снабжено кривошипно-шатунными механизмами, шатун каждого из которых при помощи рычагов и шарниров связан с другими концами тяг каждой пары.
Такая схема позволяет обеспечить полную независимость аэродинамических режимов работы каждой лопасти от направления ветра. Однако ограничение подвижности препятствует созданию силы тяги отдельного крыла на всей траектории ометаемой поверхности. Это приводит к заметному снижению коэффициента использования энергии ветрового потока.
Известна шарнирная лопасть с автоматическим регулированием угла атаки и кривизны профиля по патенту США 5193978 /2/, принятая в качестве прототипа, содержащая переднюю секцию, которая с помощью параллелограмного устройства поворачивается вокруг своей вертикальной оси (параллельной оси вращения ротора, к которой крепятся радиальные траверсы крыльев), и устанавливается под некоторым углом атаки к набегающему потоку. Задняя секция лопасти соединена с передней посредством шарнирного устройства. Управляющий рычаг соединен шарнирно с осью лопасти и посредством параллелограмного механизма с задней секцией лопасти. Задняя секция лопасти, поворачиваясь одновременно с передней, всегда расположена параллельно управляющему рычагу, что приводит к изменению угла атаки лопасти, а направление потока параллельно управляющему рычагу, - таким образом, кривизна профиля изменяется. На больших углах атаки возможно получение максимальной подъемной силы. Лопасть может использоваться для преобразования энергии потока или для движения в потоке.
Недостатками прототипа являются:
1. Наличие выступающих рычагов, создающих аэродинамические потери.
2. Плохая стабилизация положения лопасти в потоке - лопасть может уйти на отрицательный угол атаки.
3. При флюгировании от шквального ветра закрылок располагается под прямым углом к потоку, что создает вероятность разрушения конструкции.
4. Невозможность совершить полный оборот вокруг своей оси, т.к. управляющий рычаг имеет две жестко зафиксированные точки установки.
Все это не позволяет максимально использовать энергию ветро- или гидропотока.
Задачей, решаемой предлагаемым изобретением, является максимальное использование энергии ветрового или водного потока за счет достижения следующего технического результата: существенного, до 0.8, повышения коэффициента использования энергии ветро- или гидропотока; возможности эффективного использования в качестве автоматически устанавливаемого на поток крыла.
Поставленная техническая задача достигается тем, что в крыле с самоустановкой угла атаки к направлению набегающего потока среды, установленным на движущейся конструкции с возможностью вращения вокруг собственной оси и содержащее устройство изменения угла атаки крыла путем поворота его оси посредством воздействия на него через кинематическую связь закрылка, установленного на задней кромке крыла с возможностью поворота, устройство изменения угла атаки представляет собой ось, один конец которой расположен внутри закрылка между двумя пластинами и загнута под углом (120-135)oC с возможностью перемещения между данными пластинами, при этом ось выполнена с возможностью вращения, а ее второй конец расположен внутри крыла и кинематически связан с движущейся конструкцией с возможностью напряженно-упругого возвратного поворота при превышении рабочего момента вращения оси.
Кинематическая связь части оси устройства изменения угла атаки, расположенное в крыле, с движущейся конструкцией, выполнена в виде установленной на оси конической шестерни, входящей в зацепление с конической шестерней, смонтированной в корпусе движущейся конструкции или в виде гибкой связи.
Сущность изобретения поясняется чертежами на примере ветрогидродвигателя, на которых изображены:
Фиг. 1,- общий вид ветрогидродвигателя;
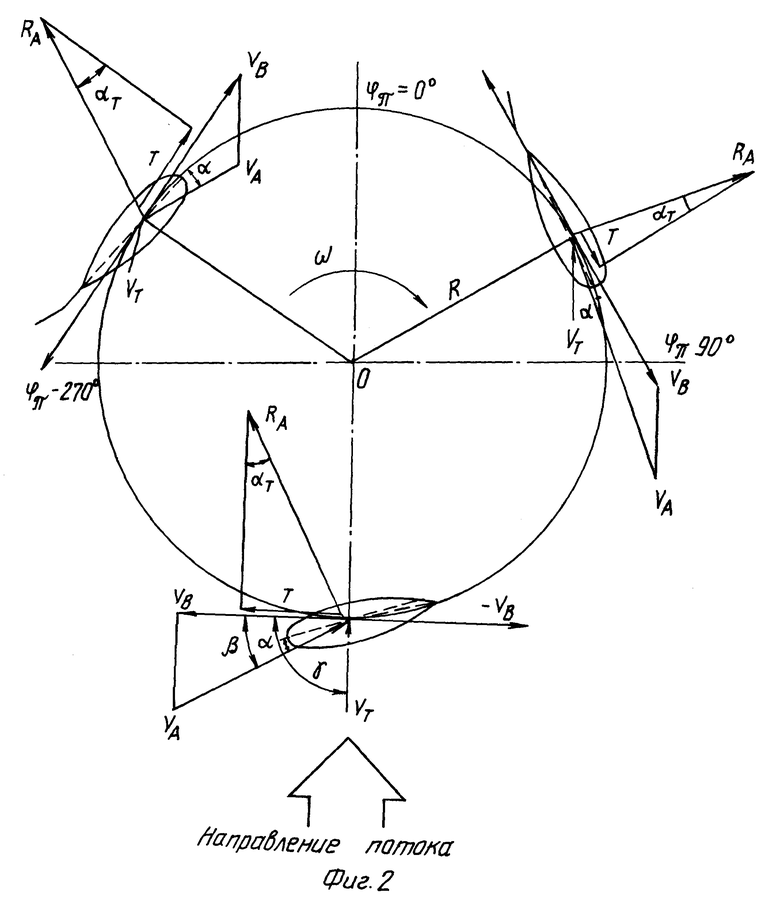
Фиг. 2 - вид сверху с векторными схемами скоростей и сил;
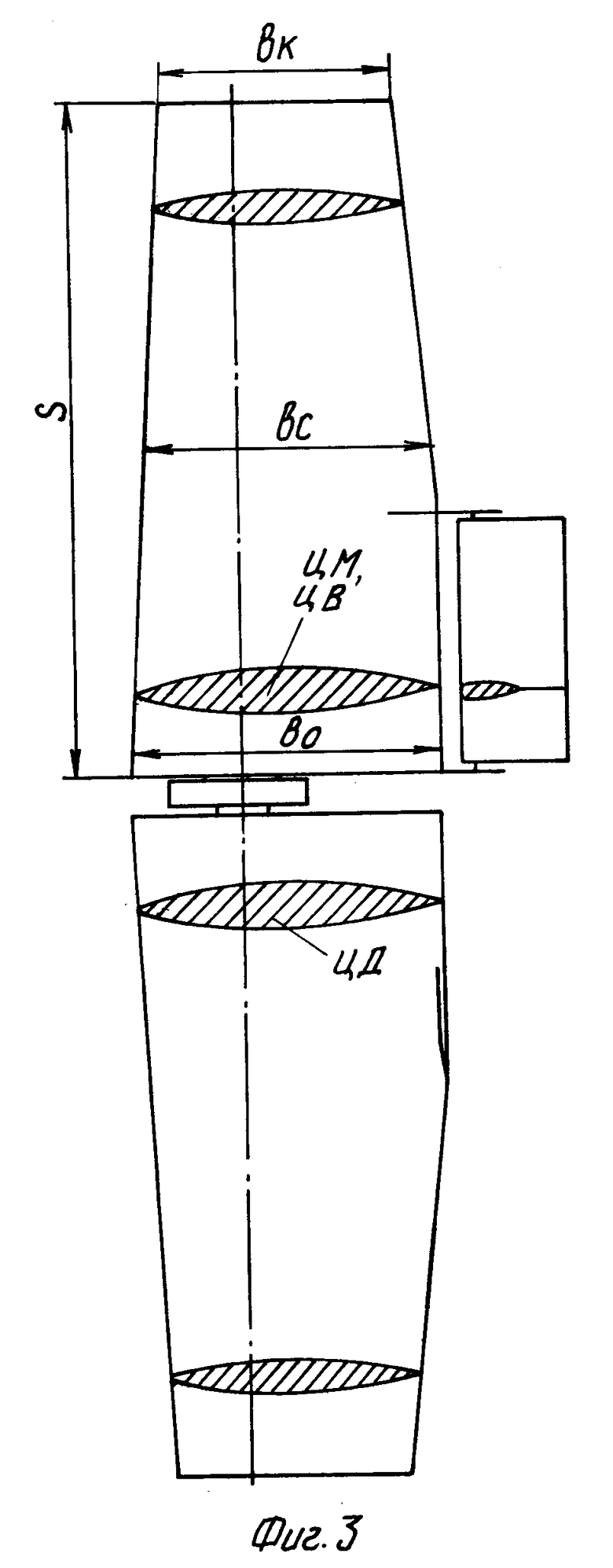
Фиг. 3 - крыло с закрылками;
Фиг.4 - кинематическая схема устройства самоустановки угла атаки.
Изобретение содержит вертикальный ротор с лопастями 1, вал 2 которого смонтирован на основании 3. Внутри основания 3 расположены мультипликатор и электрогенератор, не показанные на чертежах. Нижний конец вала кинематически соединен с валом мультипликатора. В верхней части вала 2 установлена ступица 4, к которой жестко присоединены радиальные штанги 5, равномерно расположенные по окружности. Количество радиальных штанг 5 равно количеству лопастей 1. В описываемом примере выполнения конструкции ветродвигателя рассматривается вариант трехлопастного ротора, но число лопастей может быть и большим.
Лопасти 1 смонтированы на концах радиальных штанг 5 с возможностью свободного вращения вокруг осей валиков 6, параллельных оси вала ротора 2 ротора. Каждая лопасть 1 состоит из нижнего крыла 7, верхнего крыла 8 и управляющего закрылка 9. Нижнее 7 и верхнее 8 крылья жестко соединены между собой валиком 6, свободно вращающимся в подшипнике 10, который смонтирован в корпусе 11, жестко установленном на конце радиальной штанги 5. Таким образом, каждая пара крыльев 7 и 8 свободно вращается вокруг своей оси, параллельной оси вала 2 ротора. Трапециевидные в плане крылья 7 и 8 имеют аэрогидродинамический симметричный профиль. Оси вращения крыльев 7 и 8 проходят через фокус крыла на расстоянии в 30 % хорды от передней кромки, что не вызывает смещения центра динамического давления потока на рабочих углах атаки лопасти, и флюгирование лопасти при шквальных порывах ветра обеспечивается в основном закрылком, установленным за задней кромкой крыла 8.
Крылья отбалансированы так, чтобы их центры масс находились на оси вращения, т.е. на оси валика 6, это исключает влияние центробежных сил на аэрогидродинамические силы при вращении ротора.
Управляющий закрылок 9 расположен на задней кромке крыла 8, он имеет аэрогидродинамический (взаимовыгодный) профиль. Площадь управляющего закрылка 9 составляет примерно 10% от площади боковой поверхности лопасти, что обеспечивает хорошую управляемость и стабилизацию положения лопасти в потоке. Управляющий закрылок 9 предназначен для установки лопасти 1 на оптимальный угол атаки к вектору скорости кажущегося потока. Аэрогидромеханическая установка лопасти производится с помощью устройства установки угла атаки, расположенного в корпусе 12 внутри обшивки 13 верхнего крыла 8. Управляющий закрылок 9 установлен с возможностью поворота вокруг осей 15, вращающихся в подшипниках 16, которые смонтированы на кронштейнах 17, закрепленных на задней кромке крыла 8. Внутри закрылка 9 установлены две параллельные плоские пластины 18 с гарантированным зазором между собой. В зазор между пластинами 18 заходит ось кривошипа 19, которая неподвижно соединена с осью механизма 20 под углом (120-135)o, вращающейся в подшипниках 21. Вершина угла пересечения осей 19 и 20 находится на осевой линии шарнирных осей 15 и поворот закрылка 9 на некоторый угол преобразуется во вращение оси 20 и наоборот. На другой конец оси 20, имеющий плоскую площадку на боковой поверхности, установлена коническая шестерня 22 с возможностью поворота при превышении рабочего момента вращения. Зубчатое колесо 22 снабжено механизмом слежения с регулировкой момента поворота на оси 20 для обеспечения флюгирования лопасти при шквале и входит в зацепление с коническим зубчатым колесом 23. Коническая шестерня 23 имеет возможность свободно поворачиваться на валике 6. Фланец конической шестерни 23 на боковой поверхности имеет углубление 24, к которому посредством прижимного устройства (например, ферма Мизеса) поджат фиксирующий ролик 25. Ролик 25 фиксирует шестерню 23, не позволяя ей поворачиваться относительно корпуса 11, и может быть отжат от нее рычагом центробежного регулятора 26.
При увеличении угловой скорости выше расчетной центробежная сила Fцб массы регулятора 26 увеличивается и рычаг 27, преодолевая силу прижима, отжимает ролик 25 от фланца конической шестерни 23. Шестерня проворачивается в корпусе 11 и крыло флюгируется, но остается во флюгерном положении только до тех пор, пока угловая скорость не понизится до расчетной. Порог срабатывания регулятора поддается регулировке. В исходном положении хорда крала 8 и закрылка 9 расположены на прямой, перпендикулярной осевой линии своей радиальной штанги, т.е. на касательной к окружности вращения.
Принцип аэрогидродинамической установки угла атаки лопасти основан на использовании разницы в расположении центров динамического давления потока на симметричном выпуклом профиле крыла и симметричном вогнутом профиле закрылка. При изменении угла атаки крыла симметричного выпуклого профиля до его закритического значения центр динамического давления вдоль хорды не перемещается и крыло не испытывает восстанавливающей силы. У закрылка центр динамического давления при минимальном отклонении от флюгерного положения перемещается к задней кромке и он стремится восстановить свое флюгерное положение. Закрылок кинематически связан с крылом, внутри которого жестко установлен корпус механизма, кинематически связанного с радиальной штангой в ее азимутальном положении относительно направления потока. Угол атаки каждого крыла зависит от заданного угла 19 к оси 20 и азимутального (курсового) угла данного крыла к данной скорости ветра при данной скорости вращения ротора.
Предлагаемое изобретение работает следующим образом:
Рассмотрим начальный момент воздействия потока на неподвижный ротор. Поток воздействует на закрылок 9, который, стремясь занять флюгерное положение, поворачивается вместе с крылом на некоторый угол. Вместе с закрылком 9 поворачиваются и плоские пластины 18, между которыми заходит ось кривошипа 19. Ось 19 поворачивается вместе с пластинами 18 в горизонтальной плоскости, одновременно скользя по поверхности одной из пластин в вертикальной плоскости, т.е. с синусно-косинусной зависимостью. Оси механизма 20 сообщается момент вращения и коническая шестерня 22 обкатывает шестерню 23 до момента, когда хорда закрылка не будет параллельна потоку. Максимальный угол отклонения закрылка относительно хорды крыла 8 в данной конструкции равен 45o.
При принудительном повороте закрылка 9 относительно крыла 8 на 45o зубчатое колесо 22 поворачивается на 90o и, обкатываясь по зубчатому колесу 23, поворачивает лопасть 1 на 90o от первоначального положения. При этом сам закрылок 9 поворачивается в пространстве на угол 90o + 45o = 135o. Среднее соотношение между углом поворота крыла 8, равным 90oC, и полным углом поворота закрылка 9, равным 135o, равно 0,66, а угол атаки α = β-0,66β. При неподвижном роторе β = γ = 90°,α = 90°-59,4°= 30,6°. Крыло располагается в: азимуте 0o или 180o и сила динамического давления на нем немедленно преобразуется в силу тяги, направленную по касательной к окружности вращения ротора. Ротор начинает вращаться с окружной скоростью Vβ, при этом каждое крыло индуцирует встречный поток -Vβ= Vβ и на него воздействует поток, равный алгебраической сумме векторов Vβ и VТ, т.е. VA и составляющий угол β с вектором Vβ, который в свою очередь образует угол γc с вектором VТ. Учитывая, что наибольший коэффициент использования потока возможен при Vβ= Vт•2, т. е. относительная скорость Zс = 2, и применяя теорему для курсов парусных судов, можно рассчитать тягу, создаваемую каждым крылом, и подсчитать суммарную тягу всех крыльев за один полный оборот. Таким образом, закрылок, отслеживая поток VA, постоянно создает момент поворота на оси 20 угол атаки α, постоянно обеспечивая тягу T, направленную по линии вектора Vβ. При сильном порыве ветра на закрылке 9 возникает дополнительное боковое динамическое давление. Момент на оси 20 резко возрастает и зубчатая шестерня 22 проворачивается на оси 20. Закрылок 9 теряет жесткую кинематическую связь с крылом 8 и флюгируется. Для крыла 8 угол α оказывается в данный момент закритичный и оно также флюгируется. Аналогичный процесс происходит и с другими крыльями, то есть ротор "обезветривается", и после прохождения шквала крылья, находясь в азимуте ϕπ= 90°, опять восстанавливают свою работоспособность
При увеличении скорости потока VT или при снижении нагрузки электрогенератора может возрасти окружная скорость Vβ= ωR. Увеличение ω - угловой скорости приведет к увеличению Fцб - центробежной силы регулятора 26 и он своим рычагом 27 отожмет прижимной ролик 25 от углубления 24 на фланце конической шестерни 23, и она провернется в корпусе 11. Под воздействием закрылка 9, оси 19 и оси 20 крыло освободится от кинематической связи и уйдет во флюгерное положение до тех пор, пока скорость вращения ротора не снизится до расчетной, после чего функции механизмов восстановятся при прохождении через точку ϕπ= 90°.
Работоспособность крыла испытана и проверена на моделях парусного катамарана и карусельного ветродвигателя.
Использованные источники:
1. Авторское свидетельство СССР N 1442692 -аналог.
2. Патент США N 5193978- прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОУСТАНАВЛИВАЮЩАЯСЯ ПАРУСНАЯ УСТАНОВКА ДЛЯ ОТБОРА ЭНЕРГИИ ПОТОКА | 2011 |
|
RU2518763C2 |
| МЕХАНИЗМ ТРАНСФОРМАЦИИ ЛОПАСТИ ТУРБИНЫ | 2014 |
|
RU2542649C1 |
| ВЕТРОГЕНЕРИРУЮЩЕЕ УСТРОЙСТВО | 2021 |
|
RU2778960C1 |
| РОТОР ВЕРТИКАЛЬНО-ОСЕВОГО ВЕТРОДВИГАТЕЛЯ | 1992 |
|
RU2034169C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧАСТОТОЙ ВРАЩЕНИЯ РОТОРА ВЕТРОДВИГАТЕЛЯ С ВЕРТИКАЛЬНОЙ ОСЬЮ И ВЕТРОДВИГАТЕЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2364748C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ КИНЕТИЧЕСКОЙ ЭНЕРГИИ ПОТОКА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ КРЫЛА И УСТАНОВКА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 2014 |
|
RU2589569C2 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ ВОЗДУШНОГО ПОТОКА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 2016 |
|
RU2702814C2 |
| АЭРОДИНАМИЧЕСКИЙ РУЛЬ (ВАРИАНТЫ) | 2000 |
|
RU2184342C2 |
| МЕХАНИЗМ ТРАНСФОРМАЦИИ ЛОПАСТИ ТУРБИНЫ | 2014 |
|
RU2542731C1 |
| Крыльчатый двигатель | 2020 |
|
RU2743564C1 |

Крыло (лопасть) предназначено для энергетических силовых установок, использующих энергию потока среды и преобразующих ее в механическую энергию, а также может быть использовано как жесткое парус-крыло, ветродвигатель, гидродвигатель и др. Крыло с самоустановкой угла атаки к направлению набегающего потока среды установлено на движущейся конструкции с возможностью вращения вокруг собственной оси. Крыло содержит устройство изменения угла атаки крыла путем поворота его оси посредством воздействия на него через кинематическую связь закрылка, установленного на задней кромке крыла с возможностью поворота. Устройство изменения угла атаки представляет собой ось, один конец которой расположен внутри закрылка между двумя пластинами и загнут под углом 120-135° с возможностью перемещения между данными пластинами, при этом ось выполнена с возможностью вращения, а ее второй конец расположен внутри крыла и кинематически связан с движущейся конструкцией с возможностью напряженно-упругого возвратного поворота при превышении рабочего момента вращения оси. Кинематическая связь части оси устройства изменения угла атаки, расположенного в крыле, с движущейся конструкцией, выполнена в виде установленной на оси конической шестерни, входящей в зацепление с конической шестерней, смонтированной в корпусе движущейся конструкции, или в виде гибкой связи. Устройство позволяет максимально использовать энергию набегающего потока. 2 з.п.ф-лы, 4 ил.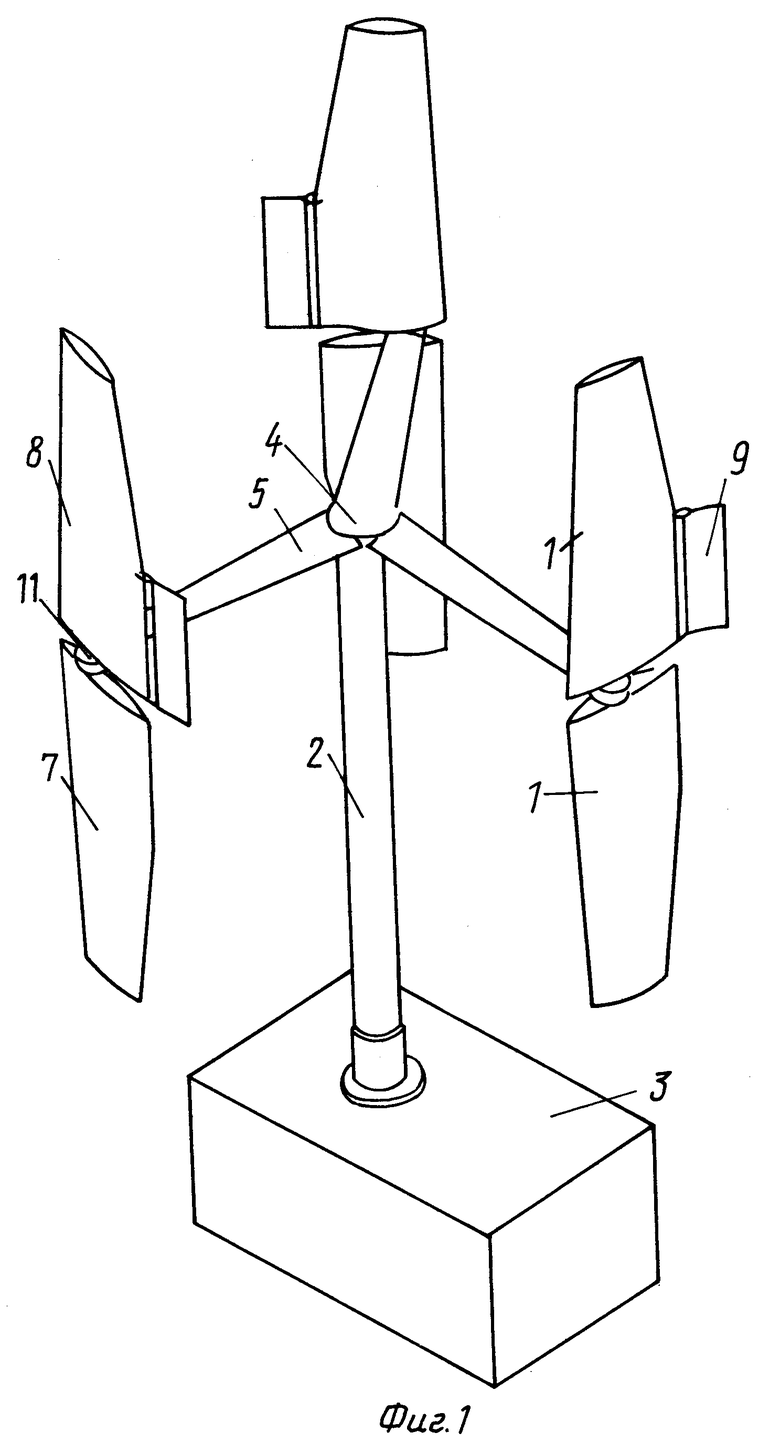
| US 5193978 A, 16.03.93 | |||
| Ветроэлектрический агрегат | 1986 |
|
SU1442692A1 |
| Лопастной двигатель для использования силы ветра и водной энергии | 1923 |
|
SU2496A1 |
| Ветроколесо для ветродвигателя | 1947 |
|
SU84468A1 |
| ВЕТРОДВИГАТЕЛЬ И ГИДРОГЕНЕРАТОР | 1992 |
|
RU2050466C1 |
| ПРЕДОХРАНИТЕЛЬНЫЙ КЛАПАН ДЛЯ ГЕРМЕТИЧНОГО АККУМУЛЯТОРА | 1995 |
|
RU2082260C1 |
| JP 58200083 A, 21.11.83. | |||
