Область техники
Изобретение относится к способу и устройству для сортировки отдельных объектов из сыпучих материалов, в частности раздробленной минеральной руды, измельченных и неизмельченных полимеров из отходов и измельченной древесины на транспортировочном устройстве, содержащем управляемое устройство выгрузки, разделяющее сыпучий материал по фракциям согласно определенным видам.
Уровень техники
Такие способы и сортировочные устройства известны в технологии предварительной обработки. Наряду с системами, в которых сортируемый материал просвечивают рентгеновскими лучами, а затем сортируют его согласно свойствам выходящего излучения, применяемым в качестве критерия сортировки, известны также системы, которые используют интенсивность и спектральный состав видимого света для так называемой цветовой сортировки.
Так, например, согласно EP 0737112/DE 69430386 Т2 при помощи:
- транспортировочного устройства, имеющего единый контрастирующий фон для подлежащих транспортировке и сортировке частиц и расположенного над ним управляемого осветительного устройства,
- датчика положения для определения положения частиц, содержащего логическую схему для разделения рассматриваемой поверхности на матрицу с ячейками, содержащими некоторое количество пикселей, при помощи первого контроллера,
- детектора изображения для регистрации цветового изображения,
- процессора изображений для приема данных рассматриваемой поверхности и
- активируемого при помощи второго контроллера разделительного устройства,
частицы металлолома подвергают сортировке на основании различных сигналов, вырабатываемых из их цвета.
В основе этой системы лежит оправдавший себя технологический процесс технологии сортировки с использованием чувствительных элементов (датчиков), например, регистрация данных - анализ данных - принятие решения о сортировке - управление транспортировочным устройством. Это решение пригодно только для сортировки металлолома, так как в качестве критерия сортировки используют цвет. Если слой, состоящий из загрязнений или других веществ, перекрывает цвет материала, применяемый в качестве критерия сортировки, то эти системы неприменимы.
В источнике http://«http://www.besttoratec.com/sorter/Helius_laser-sorter.htm»в качестве источника освещения уже был описан лазер, но не для трехмерного распознавания, а в качестве излучателя для цветовой камеры.
Кроме того, из источника http://«http://www.sick.fi/ch/products/machinevision/ruler/de.toolboxpar.0008.file.tmp/Produktinformation_Ruler.pdf», страница 3, известно использование для целей сортировки ширины лазерной линии в качестве «рассеянного лазерного света».
Далее, в классификационных приложениях в деревообрабатывающей промышленности должны подвергаться анализу как форма, так и поверхностные свойства объектов. Наряду с измерением контура объекта одновременно могут создаваться изображение в градациях серого и изображение с информацией о поверхности (эффект рассеянного лазерного излучения или трахеидный эффект). В варианте классификации пиломатериалов обмеряют форму пиломатериала, который может быть заранее геометрически идентифицирован, так что могут распознаваться лишь такие дефекты как отверстия от сучков и смоляные карманы. Затем при помощи этой информации пиломатериалы подвергают сортировке согласно упомянутым признакам качества, а не согласно неопределяемым формам.
Хотя при таких вариантах применения пиломатериалы подвергаются высокоскоростному измерению, однако они не подвергаются распознаванию неопределенных форм встречающихся сортируемых объектов согласно критерию сортировки.
Кроме того, из US 20100290032 A1 известно применение для сортировки пластика, ткани, пищевых продуктов, бумаги, стекла или металла управляемого при помощи вращающегося зеркального колеса лазера, работающего в инфракрасном спектре, который однако не может непрерывно производить измерение во всех положениях, так как к имеющемуся там точечному датчику информация подводится последовательно посредством зеркала. Это решение обеспечивает лишь распознавание согласно спектральному составу.
В патенте US 6914678 B1 для автоматического распознавания и сортировки особых видов пластика в отходах описаны лампы, которые испускают инфракрасное или видимое излучение. Применяют зеркало, которое поворачивает инфракрасное или видимое излучение, и камеру в качестве модуля распознавания. Хотя одновременно могут распознаваться несколько длин волн, однако возможен только анализ состава ближнего инфракрасного спектра или видимого спектра отраженного света, и распознаются лишь спектральные различия.
В другой области для распознавания различий в тканях живых организмов, например людей или животных, согласно WO 2006/038876 A1 применяют лазер с невидимым излучением, например «монолитный лазер» с быстро меняющейся длиной волны в качестве системы для создания изображений ОСТ (оптической когерентной томографии) согласно методу интерферометрии. Эта система служит для определения расстояний посредством модуляции длины волны. Она применима также при проверке материалов для обнаружения трещин или неравномерностей. При помощи выполненного с возможностью модуляции точечного лазера с поворачивающим зеркалом может распознаваться не поверхность, а только внутреннее строение.
Описание изобретения
Анализ состояния техники показывает, что для распознавания объектов, с одной стороны, в качестве критерия сортировки применяют цвет поверхностей, а с другой стороны, определяют внутреннее строение объекта. Если слой, состоящий из загрязнений или других веществ, перекрывает цвет материала, применяемый в качестве критерия сортировки, то такие системы неприменимы.
В отличие от этого, в основе изобретения лежит задача создать, с сохранением принципов процесса сортировки при помощи чувствительных элементов, способ и устройство, которые эффективно применимы для индивидуальной сортировки объектов из сыпучих материалов, в частности раздробленной минеральной руды, измельченных и неизмельченных полимеров из отходов, измельченной древесины, а также как металлических, так и минеральных компонентов, и в которых применяются многомерный критерий сортировки, использующий распределение сортируемого объекта по высоте и рассеяние света от источника света на заранее неопределенной многогранной поверхности сортируемых объектов, и известные камеры.
Согласно изобретению для распознавания различий материалов в способе используется распространение света в поверхности материала сортируемого объекта, при этом свет линейного лазера проецируют поперечно к направлению транспортировки на плоскость транспортировки, например, на транспортерную ленту или на спускной желоб, лежащие в этой плоскости сортируемые объекты перемещают под источником света, при этом часть света отражается от поверхности объектов, а другая часть, в соответствии с топологическими свойствами поверхности объектов, входит в верхнюю многогранную геометрическую структуру материала, рассеивается и снова выходит рядом с местом входа, и такое распространение света при отражении визуально обнаруживают по определяемой ширине линии лазерного света на поверхности материала. При этом используют тот физический факт, что светопроницаемые объекты дают широкое отражение линии лазерного света, а светонепроницаемые - узкое.
Таким образом, предложенная в изобретении основа способа концентрируется на этапах, на которых:
- в качестве критерия сортировки применяют распределение по высоте сортируемых на транспортировочном устройстве объектов и расширение постоянно светящейся световой полосы на заранее неизвестной многогранной поверхности отдельного объекта,
- световую полосу проецируют на плоскость, при этом первая часть проецируемого света отражается от поверхностей объектов, а вторая часть в соответствии с топологическими или полигональными свойствами поверхности отдельного объекта входит в соответствующую верхнюю многогранную геометрическую структуру материала в месте входа, затем рассеивается и снова выходит в месте выхода, при этом свет проходит определенный путь ниже поверхности материала,
- такое распространение света путем отражения и рассеяния оптически обнаруживают в растре с определенной величиной шага на сегмент вдоль световой полосы, с привязкой по месту и времени, в виде цифровых сигналов множества последовательно записанных строк по принципу лазерной триангуляции или полигонометрии, с определением на высоте места измерения,
- обнаруженное расширение световой полосы регистрируют и отображают как буферизованное изображение, и в буферизованных строках связные области измеряемых значений идентифицируют в качестве изображения объекта, соответствующего реальному объекту, и идентифицируют границы реальных объектов в буферизованном изображении,
- данные всех измеряемых значений изображения реального объекта преобразуют в значения признаков изображений объектов и в зависимости от заранее установленных параметров сортировки для значений признаков управляют устройством выгрузки транспортировочного устройства.
Ширина линии лазерного света обнаруживается камерой путем пространственного разрешения с заданной частотой по принципу применяемой и используемой согласно изобретению лазерной триангуляции.
Эта лазерная триангуляция означает, что опорные точки на частицах сыпучего материала, форма которых заранее неизвестна, идентифицируют и измеряют их положение в системе координат согласно принципам тригонометрии, а именно при помощи измерений ширин и длин отдельных квазитригонометрических точек и их квазиазимутов.
При помощи устройства сопряжения камера регистрирует обнаруживаемую ширину лазерной линии на поверхности материала построчно и с привязкой ко времени в форме изображения, формируемого камерой. Оно подвергается анализу при помощи программного обеспечения в вычислительном устройстве.
Программное обеспечение управляет в зависимости от установленных параметров сортировки устройством выгрузки, например упомянутым транспортировочным устройством, которое разделяет поток сыпучего материала по меньшей мере на две фракции.
Таким образом, в способе в качестве критерия сортировки используют ширину лазерной линии на поверхности материала, определенную локально, и, дополнительно, высоту места измерения, в котором была определена ширина лазерной линии.
Неожиданным образом, в частности, для сыпучих материалов с минеральными компонентами, эта комбинация признаков обеспечивает возможность индивидуальной сортировки частиц, например сыпучих материалов, содержащих компоненты из кварца и полевого шпата.
С другой стороны, способ применим также для сыпучих материалов, содержащих компоненты металлолома, например блестящие металлы, которые дают более узкое отражение, чем полимеры.
Преимущество изобретения по сравнению с проанализированными выше способами, например способом цветовой сортировки, состоит в том, что в качестве критерия сортировки может использоваться зависящая от глубины проникновения светопроницаемость поверхности сортируемого объекта. При этом заранее неизвестные топологические свойства поверхностей объектов становятся идентифицируемыми.
Благодаря этому на основании своей структуры могут разделяться, например, минералы с различным строением, в частности кварц и полевой шпат, или части металлолома, имеющие различную форму.
Таким образом, это решение включает в качестве критерия сортировки признак «истории продукта», так как во многих случаях невозможно производить сортировку только на основании цвета, например, отличать заряды подушек безопасности от загруженного в измельчитель металлолома, так как они имеют одинаковый цвет. При этом заряды подушек безопасности вследствие принципа функционирования в автомобиле всегда имеют одинаковую или аналогичную форму, которая отличается от других частей металлолома и которая после воздействия нагрузок в измельчителе изменяется несущественно.
Дополнительное преимущество применяемой согласно изобретению лазерной триангуляции состоит в том, что сортируемый материал может однозначно отграничиваться от транспортерной ленты при помощи чувствительных элементов, так как он всегда выступает над транспортерной лентой по направлению вверх. В противоположность этому, например при цветовом распознавании, должна создаваться возможность различения цвета транспортерной ленты и цвета объекта. Это не всегда может быть реализовано без дополнительных затрат, так как преимущественно транспортерная лента приобретает цвет потока материала.
По сравнению с известными способами и устройствами изобретение отличается тем, что благодаря эффекту, создаваемому новой комбинацией так называемого "эффекта ореола" и триангуляции по высоте, оно обеспечивает распознавание с более эффективной сортировкой, чем использование только спектральных различий разделяемых объектов.
Далее, процесс способа включает критерии сортировки согласно распределению сортируемых объектов по высоте на транспортировочном устройстве и согласно расширению световой полосы источника света на заранее неизвестной многогранной поверхности отдельного объекта и выполняется путем управления устройством выгрузки, а также включает конкретные этапы, на которых:
а) постоянно светящуюся световую полосу от источника света проецируют поперечно к направлению транспортировки сыпучего материала на плоскость транспортировочного устройства,
б) лежащие на этой плоскости и подлежащие сортировке реальные объекты перемещают под световой полосой,
в) при этом первая часть света световой полосы отражается от поверхностей объектов, а вторая часть, в соответствии с топологическими свойствами или многогранной структурой поверхности отдельного объекта, входит в соответствующую верхнюю многогранную геометрическую структуру материала в месте входа, затем рассеивается и снова выходит в месте выхода, при этом свет проходит определенный путь ниже поверхности материала,
г) такое отраженное и рассеянное распространение света оптически обнаруживают в растре с определенной величиной шага и с привязкой к месту и времени, буферизуют в виде цифровых сигналов множества последовательно записанных строк, при этом расширение световой полосы обнаруживают камерой по принципу лазерной триангуляции или полигонометрии с частотой по меньшей мере 100 Гц, с разрешением максимум 10 мм/пиксель, а предпочтительно от 0,1 до 10 мм/пиксель, и с определением на высоте места измерения, и обнаруживаемое расширение световой полосы записывают по меньшей мере построчно и по меньшей мере с привязкой ко времени и формируют буферизованное изображение, в этих буферизованных строках при помощи устанавливаемых пороговых значений измеряемых величин идентифицируют связные области в качестве изображения объекта, соответствующего реальному объекту, при этом границы реальных объектов идентифицируют в буферизованном изображении при помощи методов обработки изображений,
д) данные всех измеряемых значений изображения объекта совместно подвергают статистическому анализу и преобразуют их в значения признаков изображений объектов и, таким образом, реальных объектов, и
е) в зависимости от заранее установленных параметров сортировки для значений признаков приводят в действие устройство выгрузки транспортировочного устройства, которое разделяет сыпучий материал по меньшей мере на две фракции реальных объектов сыпучего материала.
Предпочтительно в этом способе:
- в качестве источника света применяют линейный лазер, а в качестве световой полосы - лазерную линию,
- величина шага на сегмент вдоль световой полосы может составлять от 0,1 до 10 мм,
- пространственное разрешение световой полосы находится в диапазоне от 0,1 до 10 мм/пиксель,
- соответствующее изображение объекта идентифицируют в буферизованном изображении при помощи методов обработки изображений, и/или
- применяют поверхностный чувствительный элемент для камеры, работающей по принципу лазерной триангуляции.
Предпочтительно для осуществления способа применяют программу в виде программного обеспечения для управляющего способом вычислительного модуля, который выполняет по меньшей мере одну из следующих функций:
- оптическое обнаружение распространения отраженного от поверхностей объектов или рассеянного света в растре с определенной величиной шага вдоль световой полосы,
- привязанная к месту и времени буферизация нескольких последовательно записанных строк в виде цифровых сигналов,
- идентификация в этих буферизованных строках связных областей и их обработка, на основании устанавливаемых пороговых значений измеряемых величин, как изображений объектов, и управление устройством выгрузки для разделения объектов на фракции.
В эти функции интегрированы в виде параметров или в цифровом виде данные или признаки для применения источника света, например линейного лазера, создающего световую полосу, величины шагов и строки, высоты места измерения, а также привязанные к времени запись, буферизация и формирование изображения, а именно, с целью обеспечения вытекающих из пп.1-7 формулы изобретения требований к способу и соответствующих признаков устройства.
В соответствии с этим для осуществления способа применяют устройство, которое включает в себя:
а) транспортировочное устройство, содержащее первые средства записи сигналов от чувствительных элементов для управления устройством выгрузки,
б) источник света, который может быть выполнен в виде линейного лазера с неподвижным оптическим элементом, для формирования луча для создания световой полосы, например непрерывно светящейся лазерной линии,
в) вторые средства для обнаружения расширения определимой ширины световой полосы при отражении,
г) третьи средства для буферизации привязанных к месту и времени цифровых сигналов множества последовательно записанных строк и формирование из них изображения,
д) четвертые средства для идентификации связных областей на основании регулируемых пороговых значений для измеряемых величин объектов в качестве сигналов для параметров сортировки, при помощи которых могут управляться первые средства, при этом
е) первые-четвертые средства, соответственно, имеют по меньшей мере один из нижеследующих элементов:
- чувствительный элемент (датчик),
- модуль формирования растра,
- вычислительный модуль для записи значений, обработки/анализа значений с получением данных и выдачи сигналов, и для выполнения программы, и/или
- камеру.
Изобретение поясняется в качестве варианта выполнения при помощи чертежей.
Краткое описание чертежей
На чертежах показано:
фиг.1 - представление способа на схеме принципа его функционирования с существенными признаками, и
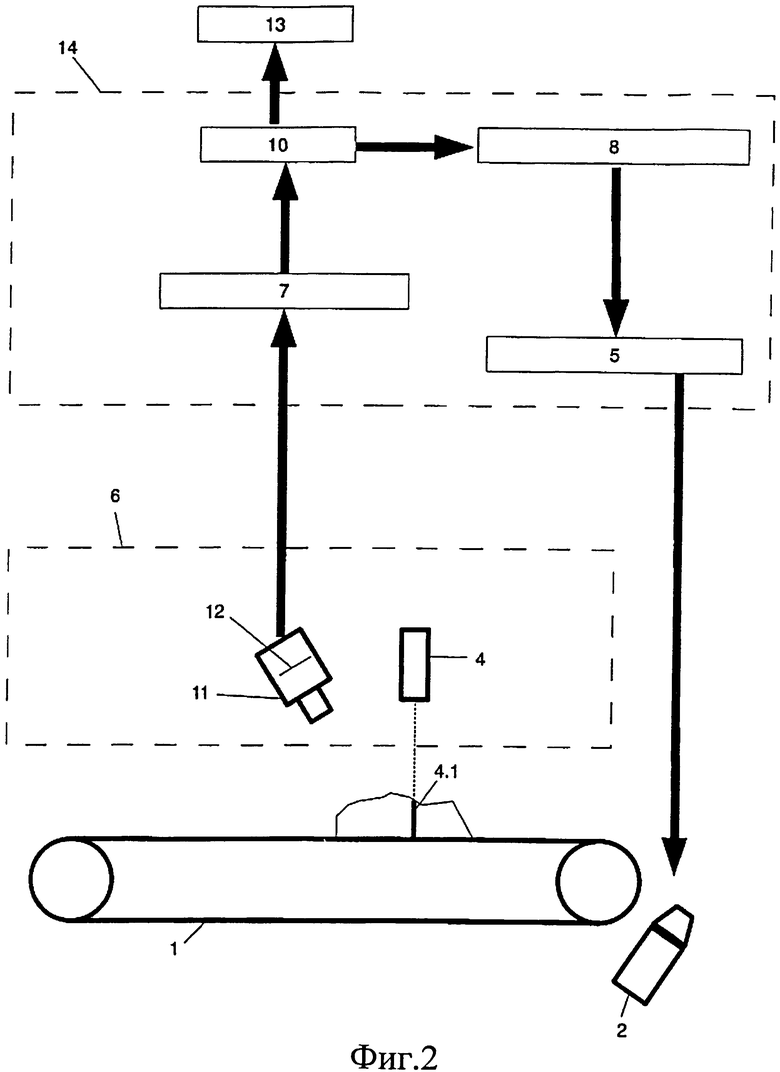
фиг.2 - схематическое изображение устройства для осуществления способа.
Предпочтительный вариант осуществления изобретения
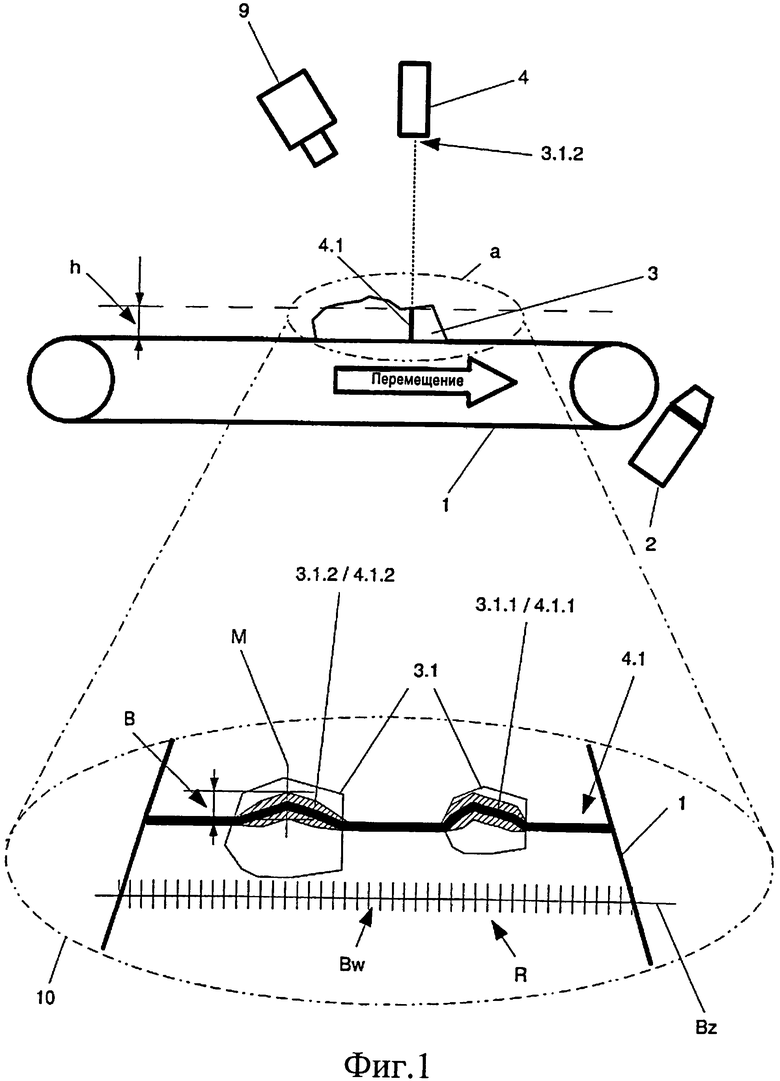
На фиг.1 показано, как световую полосу 4.1 в виде лазерной линии линейного лазера, применяемого в качестве источника 4 света, проецируют на плоскость транспортировочного устройства 1 поперечно к указанному стрелкой направлению транспортировки сыпучего материала 3, содержащего объекты, не полностью поглощающие лазерное излучение. В это время лежащие на данной плоскости и подлежащие сортировке объекты 3.1 перемещают под световой полосой 4.1.
При этом первая часть 4.1.1 света, создаваемого световой полосой 4.1, отражается от одной из поверхностей объектов 3.1. Вторая часть 4.1.2, в соответствии с не показанными здесь топологическими свойствами или многогранной структурой поверхности отдельного объекта 3.1, входит в соответствующую верхнюю многогранную геометрическую структуру материала в месте 3.1.1 входа и затем рассеивается, чтобы снова выйти в месте 3.1.2 выхода. Это означает, что свет проходит определенный путь ниже поверхности материала, что отличается от известного уровня техники.
Расширение B световой полосы при ее отражении и рассеянии определяют на высоте h места М измерения. Кроме того, в растре R с определенной величиной BW шага, которая предпочтительно составляет от 0,1 до 10 мм на сегмент, это расширение B оптически обнаруживают вдоль световой полосы 4.1 при помощи камеры 9 согласно принципу лазерной триангуляции или полигонометрии с частотой по меньшей мере 100 Гц, с разрешением максимум 10 мм/пиксель, а предпочтительно от 0,1 до 10 мм/пиксель, и с привязкой к месту и времени, подвергают буферизации в виде цифровых сигналов множества последовательно записанных строк BZ, и выводят в изображение 10.
В этих буферизованных строках BZ на основании регулируемых пороговых значений измеряемых величин идентифицируют связные области как объекты 3.1. Затем данные всех измеренных величин объектов совместно подвергают статистическому анализу и преобразуют их в значения признаков объектов 3.1. При этом изображение объекта, соответствующее реальному объекту 3.1, идентифицируют посредством того, что границы реальных объектов 3.1 идентифицируют в буферизованном изображении 10 при помощи методов обработки изображений.
В зависимости от установленных заранее параметров сортировки для признаков объектов управляют устройством 2 выгрузки транспортировочного устройства 1, которое разделяет сыпучий материал 3 по меньшей мере на две фракции, например, полезный продукт и отходы объектов 3.1 сыпучего материала 3.
Согласно фиг.2, устройство включает транспортировочное устройство 1, содержащее первые средства 5 для основанного на чувствительных элементах управления устройством 2 выгрузки. Источник 4 света, например линейный лазер, создает световую полосу 4.1 в виде лазерной линии. Вторые средства 6 обнаруживают расширение B (фиг.1) измеряемой ширины световой полосы 4.1 вследствие отражения и рассеяния, а третьи средства 7 буферизуют привязанные к месту и времени цифровые сигналы множества последовательно записанных строк в изображении 10. Четвертые средства 8 служат для идентификации связных областей на основании устанавливаемых пороговых значений для измеряемых величин объектов 3.1 в качестве сигналов для параметров сортировки, при помощи которых могут управляться первые средства 5.
При осуществлении способа первые-четвертые средства 5, 6, 7, 8 могут соответственно иметь по меньшей мере один из нижеследующих элементов, например чувствительные элементы 11, модуль 12 формирования растра R, дисплей 13 для вывода изображения 10 и вычислительный модуль 14 для выполнения программы.
Из сопоставления проанализированного выше состояния техники с описанным изобретением, а также описанным выше вариантом его выполнения, и принимая во внимание отрицательные эффекты, возникающие в US 2010/0290032 A1 и US 6914678 B1, очевидно, что согласно изобретению неожиданным образом:
- во время освещения создают непрерывно освещенную лазерную линию в видимом спектре с постоянной длиной волны,
- при помощи камеры, работающей по принципу лазерной триангуляции, то есть двухмерного датчика изображения, почти одновременно обнаруживают расширение всей лазерной линии, для чего используют различия яркости в изображении, получаемом от камеры, и
- происходит геометрическое отклонение лазерного света на поверхности и ниже поверхности после повторного выхода, так что
- в качестве результирующего общего эффекта построчное определение высоты и определение ширины полосы лазерного света используют для регистрации так называемого эффекта ореола, чтобы различать объекты в потоке сыпучего материала и одновременно измерять различие по высоте между транспортерной лентой и объектами.
Таким образом, изобретение выгодно отличается от известного уровня техники, при котором для распознавания объектов в качестве критерия сортировки по существу, с одной стороны, применяется цвет поверхностей объектов, а с другой стороны, определяется внутреннее строение объекта.
Промышленная применимость
Так как в изобретении предложено экономически выгодное решение для обеспечиваемой чувствительными элементами сортировки отдельных заранее неопределенных поверхностей произвольных сыпучих материалов посредством определения координат частиц материала при помощи электронной полигонометрии, то обеспечено широкое промышленное применение изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МУЛЬТИСПЕКТРАЛЬНЫЙ ЛАЗЕРНЫЙ ФОТОСЕПАРАТОР | 2015 |
|
RU2605894C1 |
| БЛОК ДАТЧИКА ДЛЯ КОНТРОЛЯ ПОВЕРХНОСТИ ОБЪЕКТА И СПОСОБ ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО КОНТРОЛЯ | 1998 |
|
RU2186372C2 |
| ЛАЗЕРНЫЙ СОРТИРОВЩИК | 2011 |
|
RU2489215C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ВИДЕОИЗОБРАЖЕНИЙ, А ТАКЖЕ СПОСОБ ИЗГОТОВЛЕНИЯ УСТРОЙСТВА | 1998 |
|
RU2151470C1 |
| ОПТОВОЛОКОННЫЙ ЛАЗЕРНЫЙ СОРТИРОВЩИК | 2012 |
|
RU2521215C1 |
| ОПТОВОЛОКОННЫЙ ФОТОСЕПАРАТОР | 2014 |
|
RU2599357C2 |
| РОБОТИЗИРОВАННЫЙ АВТОМАТИЧЕСКИЙ КОМПЛЕКС ПО СОРТИРОВКЕ ТВЁРДЫХ КОММУНАЛЬНЫХ ОТХОДОВ НА ОСНОВЕ НЕЙРОННЫХ СЕТЕЙ | 2019 |
|
RU2731052C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ТОЧНОСТИ УСТАНОВКИ СБОРОК ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ В ЯДЕРНОМ РЕАКТОРЕ | 2015 |
|
RU2594173C2 |
| Устройство отображения информации | 1987 |
|
SU1571543A1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ПРОФИЛИРОВАНИЯ ГЛУБИНЫ ПОВЕРХНОСТИ ЦЕЛЕВОГО ОБЪЕКТА | 2013 |
|
RU2633922C2 |
В способе используют устройство для сортировки отдельных объектов (3.1) из сыпучих материалов (3) на транспортировочном устройстве (1) и управляемое устройство (2) выгрузки, разделяющее фракции, а в качестве критериев сортировки применяют распределение объекта (3.1) по высоте и распространение света от источника (4) света, при этом световую полосу (4.1) проецируют поперечно к направлению транспортировки сыпучего материала (3) на плоскость транспортировочного устройства (1), объекты (3.1) перемещают под световой полосой (4.1), при этом первая часть (4.1.1) света отражается объектом, вторая часть (4.1.2) входит в объект в месте (3.1.1) входа, рассеивается и выходит в месте (3.1.2) выхода, расширение (В) световой полосы вследствие рассеяния обнаруживают при помощи камеры (9) и в буферизованных строках (BZ) идентифицируют связные области, а измеренные значения подвергают анализу и преобразуют в значения признаков, и в зависимости от заранее установленных параметров сортировки приводят в действие устройство (2) выгрузки. 2 н. и 7 з.п. ф-лы, 2 ил.
1. Способ сортировки отдельных объектов (3.1) из сыпучих материалов (3), в котором:
- в качестве критериев сортировки применяют распределение подлежащих сортировке объектов (3.1) по высоте на транспортировочном устройстве (1) и расширение световой полосы (4.1), постоянно освещающей заранее неизвестную многогранную поверхность отдельного объекта (3.1),
- световую полосу (4.1) проецируют на плоскость, при этом первая часть (4.1.1) проецируемого света отражается от поверхностей объектов (3.1), а вторая часть (4.1.2), в соответствии с топологией или многогранной структурой поверхности отдельного объекта (3.1), входит в соответствующую верхнюю многогранную геометрическую структуру материала в месте (3.1.1) входа, затем рассеивается и выходит в месте (3.1.2) выхода, причем путь, по которому проходит свет, лежит ниже поверхности материала,
- расширение (В) световой полосы при отражении и рассеянии обнаруживают оптически в растре (R), характеризующемся величиной (BW) шага на сегмент вдоль световой полосы (4.1), с привязкой к месту и времени, в виде цифровых сигналов множества последовательно записанных строк (BZ) и с определением на высоте (h) места (М) измерения согласно принципу лазерной триангуляции или полигонометрии,
- записывают обнаруженное расширение (B) световой полосы (4.1) и формируют буферизованное изображение (10), при этом в буферизованных строках (BZ) связные области измеренных величин идентифицируют как изображение, соответствующее реальному объекту (3.1), и идентифицируют границы реальных объектов в буферизованном изображении (10),
- данные всех измеренных величин изображения реального объекта (3.1) преобразуют в значения признаков изображений объектов и в зависимости от заранее установленных параметров сортировки для значений признаков приводят в действие устройство (2) выгрузки транспортировочного устройства (1).
2. Способ по п.1, в котором для сортировки отдельных объектов (3.1), в частности, из раздробленной минеральной руды, измельченных и неизмельченных полимеров из отходов или измельченной древесины на транспортировочном устройстве (1) выполняют следующие операции:
а) постоянно светящуюся световую полосу (4.1) от источника (4) света проецируют поперечно к направлению транспортировки сыпучего материала (3) на плоскость транспортировочного устройства (1),
б) лежащие на этой плоскости и подлежащие сортировке объекты (3.1) перемещают под световой полосой (4.1),
в) при этом первая часть (4.1.1) света световой полосы (4.1) отражается от поверхностей объектов (3.1), а вторая часть (4.1.2), в соответствии с топологией или многогранной структурой поверхности отдельного объекта (3.1), входит в соответствующую верхнюю многогранную геометрическую структуру материала в месте (3.1.1) входа, рассеивается и выходит в месте (3.1.2) выхода,
г) расширение (В) световой полосы при отражении и рассеянии оптически обнаруживают в растре (R), характеризующемся величиной шага (BW) на сегмент вдоль световой полосы (4.1), при помощи камеры (9) и буферизуют с привязкой к месту и времени в виде цифровых сигналов множества последовательно записанных строк (BZ), при этом расширение (В) световой полосы (4.1) обнаруживают камерой (9) по принципу лазерной триангуляции или полигонометрии с частотой по меньшей мере 100 Гц, с разрешением максимум 10 мм/пиксель и с определением на высоте (h) места (М) измерения, и обнаруженное расширение (В) световой полосы (4.1) записывают по меньшей мере построчно и по меньшей мере с привязкой ко времени и создают изображение (10) в буферизованном виде,
д) в этих буферизованных строках (BZ) идентифицируют связные области на основании регулируемых пороговых значений измеренных величин как изображение (3.1.4) объекта, соответствующее реальному объекту (3.1), путем идентификации границы реального объекта в буферизованном изображении (10),
е) данные всех измеренных величин изображения реального объекта (3.1) совместно подвергают статистическому анализу и преобразуют в значения признаков изображений объектов и, таким образом, реальных объектов (3.1), и
ж) в зависимости от заранее установленных параметров сортировки приводят в действие устройство (2) выгрузки транспортировочного устройства (1), которое разделяет сыпучий материал (3) по меньшей мере на две фракции объектов (3.1).
3. Способ по п.1 или 2, отличающийся тем, что в качестве источника (4) света применяют линейный лазер, а в качестве световой полосы (4.1) - лазерную линию.
4. Способ по п.1 или 2, отличающийся тем, что величина шага (Bw) составляет от 0,1 до 10 мм на сегмент вдоль световой полосы (4.1).
5. Способ по п.1 или 2, отличающийся тем, что разрешение световой полосы (4.1) находится в диапазоне от 0,1 до 10 мм/пиксель.
6. Способ по п.1 или 2, отличающийся тем, что изображение, соответствующее объекту, идентифицируют в буферизованном изображении (10) при помощи методов обработки изображений.
7. Способ по п.1 или 2, отличающийся тем, что применяют поверхностный чувствительный элемент для камеры (9), работающей по принципу лазерной триангуляции.
8. Способ по п.1 или 2, отличающийся тем, что для вычислительного модуля (14), управляющего способом, используют программу, выполняющую по меньшей мере одну из следующих функций:
- оптическое обнаружение распространения отраженного или рассеянного поверхностями объектов (3.1) света в растре с заданной величиной шага вдоль световой полосы (4.1),
- буферизацию, с привязкой по месту и времени, множества последовательно записанных строк в виде цифровых сигналов,
- идентификацию связных областей в этих буферизованных строках (BZ) и их анализ, на основании регулируемых пороговых значений измеряемых величин, как изображений объектов, и управление устройством (2) выгрузки для разделения объектов (3.1) на фракции,
причем в эти функции интегрированы, в виде параметров или в цифровом виде, данные или характерные особенности для применения источника (4) света, например линейного лазера со световой полосой (4.1), величины шага (BW) и строки (BZ), высоты (h) места (М) измерения, а также привязанные ко времени запись, буферизация и создание изображения (10).
9. Устройство для осуществления способа по любому из пп.1-8, которое включает:
а) транспортировочное устройство (1), содержащее первые средства (5) регистрации сигналов с использованием чувствительных элементов для приведения в действие устройства (2) выгрузки,
б) источник (4) света с неподвижным оптическим элементом для формирования луча для создания световой полосы (4.1), например в виде непрерывно светящейся лазерной линии,
в) вторые средства (6) для обнаружения расширения идентифицируемой ширины (В) световой полосы (4.1) при отражении,
г) третьи средства (7) для буферизации, с привязкой к месту и времени, цифровых сигналов множества последовательно записанных строк (BZ) и создания изображения (10),
д) четвертые средства (8) для идентификации связных областей на основании регулируемых пороговых величин измеренных значений объектов (3) в качестве сигналов для параметров сортировки, при помощи которых могут управляться первые средства (5), при этом
е) каждые из первых, вторых, третьих и четвертых средств (5, 6, 7, 8) содержат по меньшей мере один из следующих элементов:
- чувствительный элемент (11),
- модуль (12) для формирования растра (R),
- вычислительный модуль (14) для записи значений, обработки/анализа значений с получением данных и для выдачи сигналов, и для выполнения программы,
- камеру (9).
| Преобразователь рентгеновского изображения в видимое | 1975 |
|
SU550944A1 |
| Регулируемый двухтактный преобразователь постоянного напряжения | 1990 |
|
SU1830176A3 |
| Оснастка для нанесения облицовки на металлические формы | 1977 |
|
SU737112A1 |

