Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к аппарату для улучшения поведения в состоянии руления, в частности реакции на руление и/или поведения при крене, транспортного средства, при этом транспортное средство может перемещаться с помощью ходовых колес, приводимых во вращение посредством движущей силы от источника энергии.
Уровень техники
[0002] В последние годы подрессоренная масса транспортного средства имеет тенденцию увеличиваться, при этом по некоторым причинам подрессоренная масса находится на верхней стороне устройства подвески транспортного средства, причем причины включают в себя такую причину, что существует потребность в низком расходе топлива, так что используется топливосберегающая шина с небольшим сопротивлением качению, и добавляется устройство повышения эффективности использования топлива, а также требуется аккумулятор большой емкости, соответственно. Приспособление топливосберегающей шины приводит к снижению коэффициента трения между шиной и поверхностью дороги, тогда как увеличение подрессоренной массы приводит к увеличению хода подвески.
[0003] Как снижение коэффициента трения с поверхностью дороги, так и увеличение хода подвески имеют тенденцию приводить к снижению реакции на руление, когда выполняется операция руления, чтобы управлять управляемыми колесами, а именно, к снижению реакции при повороте передней части (способности к начальному повороту головной части) транспортного средства, когда выполняется операция руления. В частности, для электромобиля, который приводится в движение только посредством электродвигателя в качестве источника энергии, снижение реакции на руление является значительным, поскольку такой электромобиль содержит крупный и тяжелый аккумулятор по центру под днищем в кузове транспортного средства. Кроме того, увеличение хода подвески приводит к увеличению движения с креном транспортного средства, т.е. поведения наклона вокруг продольной оси кузова транспортного средства.
[0004] Для улучшения реакции на руление, которая имеет тенденцию ухудшаться, как описано выше, предлагается, чтобы жесткость крепления устройства подвески повышалась за счет использования эластичной втулки с высокой жесткостью или изолятора с высокой жесткостью в части, к которой крепится устройство подвески, как описано в патентном документе 1. С другой стороны, для подавления крена кузова транспортного средства обычная практика заключается в том, чтобы усиливались характеристики демпфирования колебаний амортизатора устройства подвески.
[0005] Тем не менее, контрмеры в виде повышения жесткости крепления устройства подвески или контрмеры в виде усиления характеристик демпфирования амортизатора приводят к увеличению коэффициента жесткости устройства подвески и тем самым приводят к новой проблеме в отношении колебания и шума.
Документы предшествующего уровня техники
Патентные документы
[0006] Патентный документ 1. JP 07-132720 A
Сущность изобретения
[0007] В связи с вышеизложенным, задача настоящего изобретения заключается в том, чтобы предлагать аппарат для улучшения поведения транспортного средства в состоянии руления, допускающий улучшение реакции на руление и/или поведения при крене транспортного средства во время операции руления без изменения жесткости крепления устройства подвески или характеристик демпфирования амортизатора, а именно, не вызывая новую проблему в отношении колебания и шума вследствие увеличения коэффициента жесткости устройства подвески.
[0008] Для этой задачи, согласно настоящему изобретению, предложен аппарат для улучшения поведения транспортного средства в состоянии руления для транспортного средства, при этом транспортное средство может перемещаться с помощью ходового колеса, приводимого во вращение посредством движущей силы из источника энергии, причем аппарат для улучшения поведения транспортного средства в состоянии руления отличается тем, что он содержит: средство детектирования операции руления, которое детектирует операцию руления для управления управляемым колесом транспортного средства; и средство увеличения движущей силы, которое временно увеличивает движущую силу на ходовом колесе в ответ на детектирование операции руления посредством средства детектирования операции руления.
[0009] С помощью аппарата для улучшения поведения транспортного средства в состоянии руления согласно настоящему изобретению, можно увеличивать угловой момент, который формируется посредством управляемых колес, посредством временного увеличения движущей силы ходовых колес во время операции руления, и тем самым увеличивать эффективную поперечную силу управляемых колес таким образом, что скорость поворота относительно вертикальной оси транспортного средства быстро повышается, и, как следствие, улучшать реакцию при рулении транспортного средства.
[0010] Кроме того, согласно настоящему изобретению, можно улучшать поведение транспортного средства, когда выполняется операция руления, без изменения жесткости крепления устройства подвески или характеристик демпфирования амортизатора, а именно, не вызывая новую проблему в отношении колебания и шума вследствие увеличения коэффициента жесткости устройства подвески.
Краткое описание чертежей
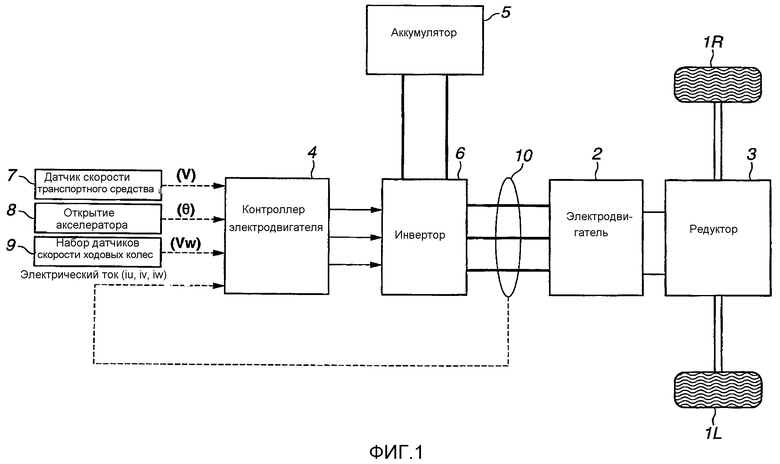
[0011] Фиг. 1 является принципиальной схемой системы, показывающей приводную систему транспортного средства и систему управления для приводной системы, при этом транспортное средство содержит аппарат для улучшения поведения транспортного средства в состоянии руления согласно варианту осуществления настоящего изобретения.
Фиг. 2 является блок-схемой алгоритма, показывающей программу улучшения поведения транспортного средства в состоянии руления, выполняемую посредством контроллера электродвигателя на фиг. 1.
Фиг. 3 является временной диаграммой операции управления улучшением поведения транспортного средства в состоянии руления по фиг. 2, при этом фиг. 3A является временной диаграммой, показывающей изменение во времени коррекции крутящего момента приведения в движение, фиг. 3B является временной диаграммой, показывающей изменение во времени разности скорости поворота относительно вертикальной оси, а фиг. 3C является временной диаграммой, показывающей изменение во времени углового момента, сформированного посредством каждого управляемого колеса, по сравнению со случаем, в котором не выполняется управление улучшением поведения транспортного средства в состоянии руления по фиг. 2.
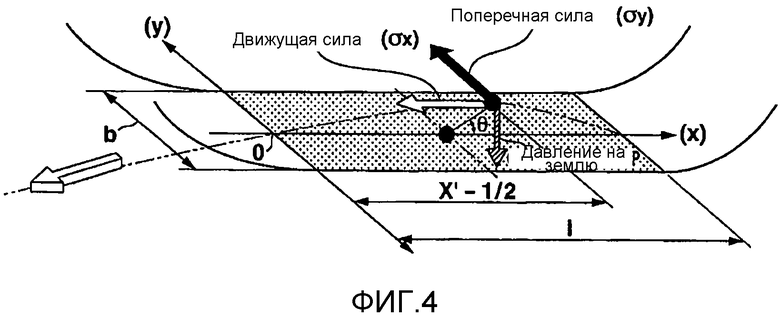
Фиг. 4 является пояснительной схемой, показывающей подробности работы управляемого колеса относительно контактной поверхности шины.
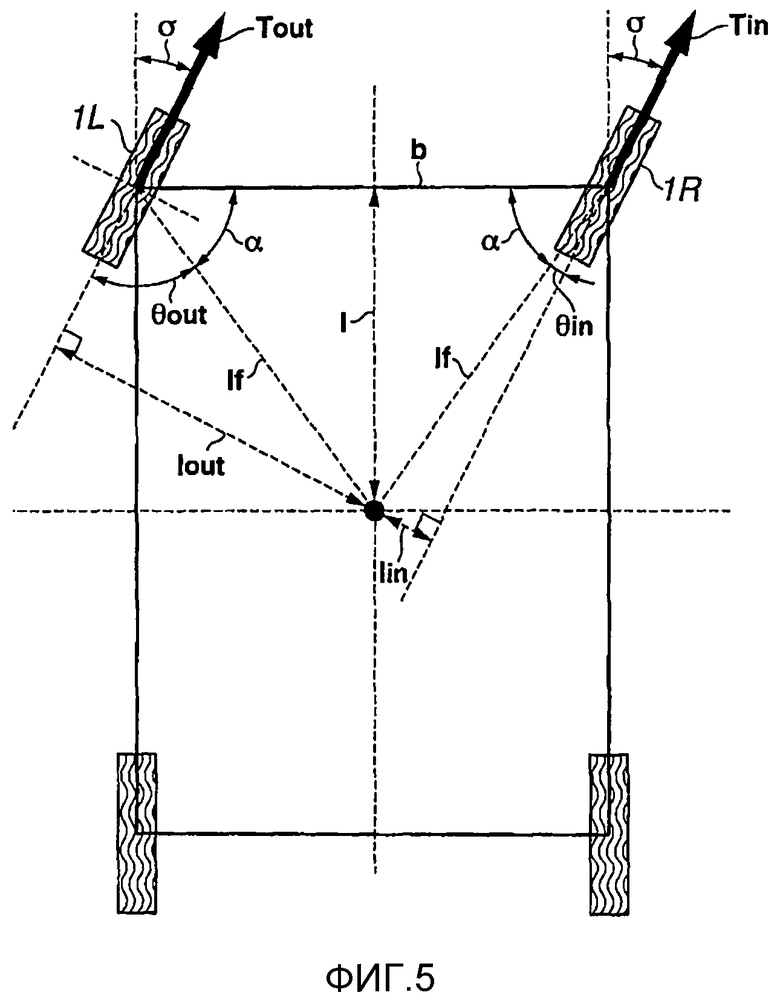
Фиг. 5 является пояснительной схемой, показывающей подробности работы транспортного средства.
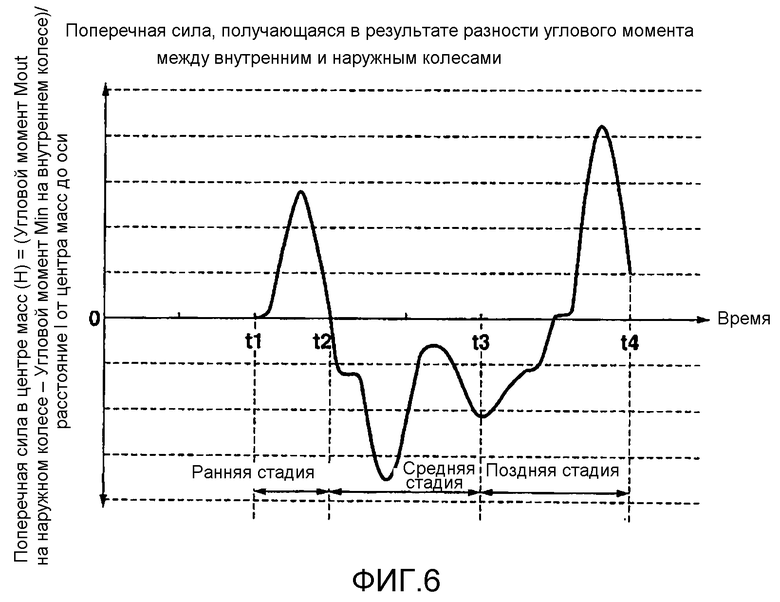
Фиг. 6 является временной диаграммой, показывающей изменение во времени поперечной силы, получающееся в результате разности углового момента между внутренним и наружным колесами в случае, если выполняется управление улучшением поведения транспортного средства в состоянии руления по фиг. 2.
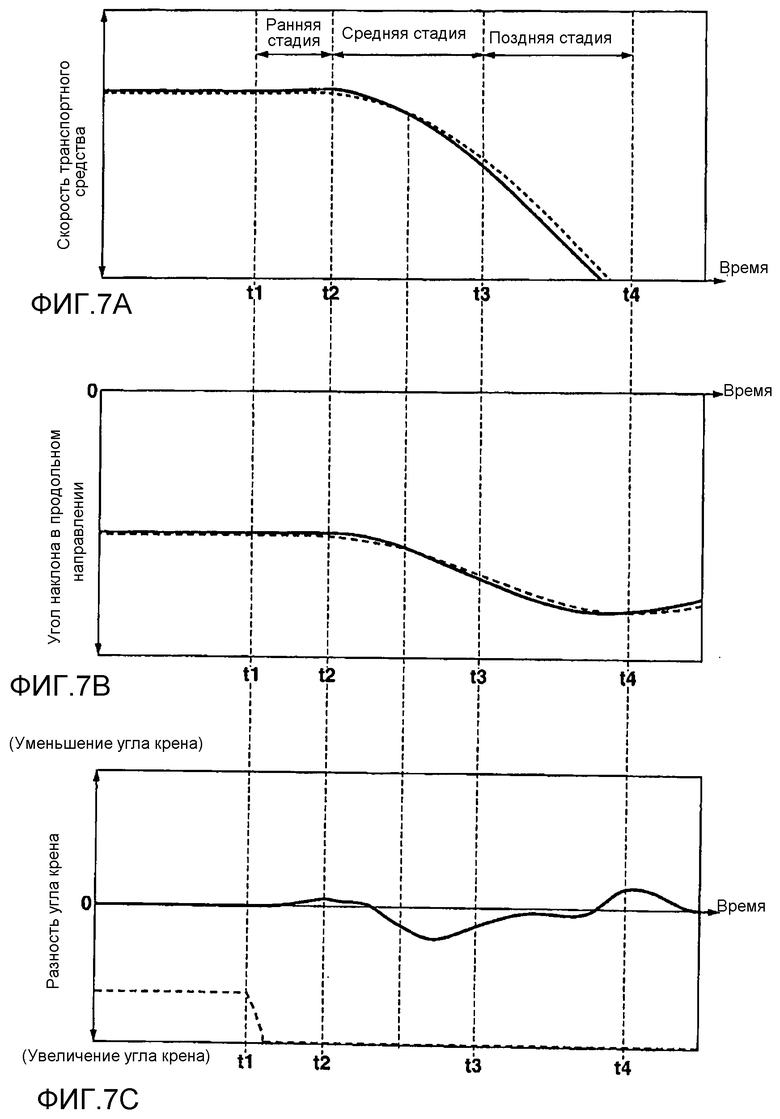
Фиг. 7 является временной диаграммой операции управления улучшением поведения транспортного средства в состоянии руления по фиг. 2, при этом фиг. 7A является временной диаграммой, показывающей изменение во времени скорости транспортного средства по сравнению со случаем, в котором не выполняется управление улучшением поведения транспортного средства в состоянии руления по фиг. 2, фиг. 7B является временной диаграммой, показывающей изменение во времени угла наклона в продольном направлении транспортного средства по сравнению со случаем, в котором не выполняется управление улучшением поведения транспортного средства в состоянии руления по фиг. 2, а фиг. 7C является временной диаграммой, показывающей изменение во времени разности угла крена по сравнению со случаем, в котором не выполняется управление улучшением поведения транспортного средства в состоянии руления по фиг. 2.
Режим(ы) осуществления изобретения
[0012] Далее описываются режимы для осуществления настоящего изобретения в отношении варианта осуществления, показанного на чертежах.
Конфигурация
Фиг. 1 показывает приводную систему транспортного средства и систему управления для приводной системы, при этом транспортное средство содержит аппарат для улучшения поведения транспортного средства в состоянии руления согласно варианту осуществления настоящего изобретения. В варианте осуществления, транспортное средство по фиг. 1 является электромобилем, который допускает движение с приведенными во вращение левым и правым передними колесами 1L, 1R, при этом левое и правое передние колеса 1L, 1R являются управляемыми колесами. Приведение во вращение левого и правого передних колес 1L, 1R реализуется посредством приведения во вращение левого и правого передних колес 1L, 1R посредством электродвигателя 2 в качестве источника энергии через редуктор 3, при этом редуктор 3 включает в себя дифференциальную. передачу.
[0013] Движущая сила электродвигателя 2 управляется посредством контроллера 4 электродвигателя, который выполняет преобразование постоянного тока в переменный из энергии аккумулятора 5 в качестве источника энергии посредством инвертора 6 и подает энергию переменного тока в электродвигатель 2 под управлением инвертора 6, таким образом чтобы согласовывать крутящий момент электродвигателя 2 с целевым крутящим моментом двигателя, полученным в качестве результата вычисления посредством контроллера 4 электродвигателя.
[0014] Если целевой крутящий момент двигателя, полученный в результате вычисления посредством контроллера 4 электродвигателя, имеет отрицательную полярность, которая запрашивает операцию рекуперативного торможения электродвигателя 2, то контроллер 4 электродвигателя прикладывает нагрузку генерирования к электродвигателю 2 через инвертор 6 и выполняет преобразование переменного тока в постоянный из энергии, сгенерированной посредством операции рекуперативного торможения электродвигателя 2, и заряжает аккумулятор 5.
[0015] Контроллер 4 электродвигателя принимает ввод информации, используемой для того, чтобы вычислять целевой крутящий момент электродвигателя, описанный выше. Информация включает в себя сигнал из датчика 7 скорости транспортного средства, который детектирует скорость V транспортного средства, которая является скоростью электромобиля относительно земли, и сигнал из датчика 8 открытия акселератора, который детектирует открытие θ акселератора (запрошенную нагрузку электродвигателя), выполняемое посредством операции вождения, и сигнал из набора 9 датчиков скорости ходовых колес, которые детектируют скорости Vw отдельных ходовых колес для левого и правого передних колес 1L, 1R, а также для левого и правого задних колес (не показаны), и сигнал из датчика 10 электрического тока, который детектирует электрические токи электродвигателя 2 (электрические токи iu, iv, iw на фиг. 1, для создания трехфазных переменных токов, состоящих из U-фазы, V-фазы и W-фазы).
[0016] Контроллер 4 электродвигателя генерирует PWM-сигнал (ШИМ-сигнал) для управления электродвигателем 2 на основе вышеуказанной информации и генерирует сигнал возбуждения для инвертора 6 через схему возбуждения на основе PWM-сигнала. Например, инвертор 6 состоит из двух переключающих элементов (к примеру, силовых полупроводниковых элементов, таких как IGBT) для каждой фазы и подает требуемый ток в электродвигатель 2 при включении/отключении переключающих элементов согласно сигналу возбуждения и выполнении преобразования из постоянного тока, поданного из аккумулятора 5, в переменный ток и обратного преобразования.
[0017] Электродвигатель 2 генерирует движущую силу на основе переменного тока, поданного из инвертора 6, и передает движущую силу на левое и правое передние колеса 1L, 1R (левое и правое управляемые колеса) через редуктор 3. Хотя транспортное средство движется, так что электродвигатель 2 тормозит посредством левого и правого передних колес 1L, 1R, т.е. электродвигатель 2 находится в так называемом состоянии обратного приведения в действие, к электродвигателю 2 прикладывается нагрузка генерирования, чтобы выполнять операцию рекуперативного торможения и регенерировать кинетическую энергию транспортного средства и заряжать аккумулятор 5.
[0018] Управление улучшением поведения транспортного средства в состоянии руления
Контроллер 4 электродвигателя выполняет управляющую программу, показанную на фиг. 2, и выполняет управление улучшением поведения транспортного средства в состоянии руления посредством управления движущей силой для электродвигателя 2.
[0019] На этапе S11, контроллер 4 электродвигателя проверяет то, выполняется или нет операция руления для управления левым и правым передними колесами 1L, 1R, посредством определения, на основе скорости Vw ходовых колес каждого ходового колеса, детектированной посредством набора 9 датчиков скорости ходовых колес, того, выше или нет разность скорости ходовых колес между левым и правым передними колесами 1L, 1R или разность скорости ходовых колес между передними и задними колесами (не показаны), а именно, разность между средней скоростью ходовых колес для левого и правого передних колес 1L, 1R и средней скоростью ходовых колес для левого и правого задних колес (не показаны), порогового значения для определения операции руления. Соответственно, этап S11 соответствует средству детектирования операции руления в настоящем изобретении.
[0020] В состоянии отсутствия операции руления, в котором определяется то, что разность скорости ходовых колес меньше заданного значения, необязательно выполнять управление улучшением поведения транспортного средства в состоянии руления, так что контроллер 4 электродвигателя выходит из управляющей программы по фиг. 2. В состоянии выполнения операции руления, в котором определяется то, что разность скорости ходовых колес превышает или равна заданному значению, необходимо выполнять управление улучшением поведения транспортного средства в состоянии руления, так что контроллер 4 электродвигателя переходит к этапу S12 и к следующим этапам, на которых контроллер 4 электродвигателя выполняет управление улучшением поведения транспортного средства в состоянии руления посредством управления движущей силой электродвигателя 2 следующим образом.
[0021] На этапе S12, контроллер 4 электродвигателя выполняет коррекцию для увеличения крутящего момента двигателя в виде коррекции целевого крутящего момента двигателя посредством приращения коррекции крутящего момента приведения в движение сразу после момента t1 времени, когда начинается операция руления, как представлено посредством сплошной формы сигнала на фиг. 3A, при этом целевой крутящий момент двигателя для электродвигателя 2 определяется на основе скорости V транспортного средства и открытия APO акселератора посредством использования подготовленной карты крутящего момента двигателя. Соответственно, этап S12 соответствует средству увеличения движущей силы в настоящем изобретении.
[0022] На следующем этапе S13 контроллер 4 электродвигателя увеличивает счетчик TM1 таймера и тем самым измеряет период времени, истекший после момента t1 времени, когда начинается коррекция для увеличения крутящего момента двигателя (когда начинается операция руления). На этапе S14, контроллер 4 электродвигателя проверяет то, указывает или нет счетчик TM1 таймера предварительно определенный период TM1s времени, а именно то, достигнут или нет момент t2 времени на фиг. 3A после того, как истек предварительно определенный период TM1s времени после момента t1 времени, когда начинается коррекция для увеличения крутящего момента двигателя (когда начинается операция руления).
[0023] До тех пор, пока на этапе S14 не определяется то, что TM1≥Tm1s (момент t2 времени на фиг. 3 достигнут после того, как истек предварительно определенный период TM1s времени от момента t1 времени, когда начинается коррекция для увеличения крутящего момента двигателя), контроллер 4 электродвигателя возвращает управление на этапы S12 и S13, так что контроллер 4 электродвигателя продолжает коррекцию для увеличения крутящего момента электродвигателя на основе формы сигнала в виде сплошной линии на фиг. 3A на этапе S12 и измеряет период времени проведения коррекции для увеличения крутящего момента двигателя на этапе S13.
[0024] В момент t2 времени на фиг. 3A, когда на этапе S14 определяется то, что TM1≥Tm1s (коррекция для увеличения крутящего момента двигателя выполняется только в течение предварительно определенного периода времени TM1s), контроллер 4 электродвигателя передает управление на этапы S15-S17. На этапе S15, контроллер 4 электродвигателя сбрасывает счетчик TM1 таймера до нуля для следующего выполнения. На этапе S16, контроллер 4 электродвигателя выполняет коррекцию для уменьшения крутящего момента двигателя в виде коррекции целевого крутящего момента двигателя посредством понижения коррекции крутящего момента приведения в движение сразу после момента t2 времени, когда завершается коррекция для увеличения крутящего момента двигателя, как представлено посредством сплошной формы сигнала на фиг. 3A. На следующем этапе S17 контроллер 4 электродвигателя увеличивает счетчик TM2 таймера и тем самым измеряет период времени, истекший после момента t2 времени, когда начинается коррекция для уменьшения крутящего момента двигателя.
[0025] На этапе S18, контроллер 4 электродвигателя проверяет то, указывает или нет счетчик TM2 таймера предварительно определенный период TM2s времени, а именно то, достигнут или нет момент t4 времени на фиг. 3A после того, как истек предварительно определенный период TM2s времени после момента t2 времени, когда начинается коррекция для уменьшения крутящего момента двигателя. До тех пор, пока на этапе S18 не определяется то, что TM2≥Tm2s (момент t4 времени на фиг. 3 достигнут после того, как истек предварительно определенный период TM2s времени после момента t2 времени, когда начинается коррекция для уменьшения крутящего момента двигателя), контроллер 4 электродвигателя возвращает управление на этапы S16 и S17, так что контроллер 4 электродвигателя продолжает коррекцию для уменьшения крутящего момента двигателя на основе формы сигнала в виде сплошной линии на фиг. 3A на этапе S16 и измеряет период времени проведения коррекции для уменьшения крутящего момента двигателя на этапе S17.
[0026] В момент t4 времени на фиг. 3A, когда на этапе S18 определяется то, что TM2≥Tm2s (коррекция для уменьшения крутящего момента двигателя выполняется только в течение предварительно определенного периода TM2s времени), контроллер 4 электродвигателя передает управление на этап S19. На этапе S19, контроллер 4 электродвигателя сбрасывает счетчик TM2 таймера до нуля для следующего выполнения.
[0027] Посредством управления движущей силой двигателя для электродвигателя 2, показанного на фиг. 2, крутящий момент двигателя управляется так, что он имеет значение, полученное посредством временного увеличения, представленного посредством формы сигнала в виде сплошной линии на фиг. 3A, относительно целевого крутящего момента двигателя в течение периода от момента t1 времени, когда начинается операция руления, до момента t2 времени, когда истек предварительно определенный период TM1s времени после момента t1 времени на фиг. 3A, и управляется так, что он имеет значение, полученное посредством временного снижения, представленного посредством формы сигнала в виде сплошной линии на фиг. 3A, относительно целевого крутящего момента двигателя в течение периода от момента t2 времени, когда завершается коррекция для увеличения крутящего момента двигателя, до момента t4 времени, когда истек предварительно определенный период TM2s времени после момента t2 времени на фиг. 3A.
[0028] Функции и преимущества
Вышеприведенное управление движущей силой двигателя служит для того, чтобы улучшать поведение транспортного средства в состоянии руления следующим образом.
[0029] В случае если подробности работы относительно контактной поверхности шины являются такими, как показано на фиг. 4, и подробности работы транспортного средства являются такими, как показано на фиг. 5, угловой момент m, сформированный посредством отдельного управляемого колеса (переднего колеса) 1L, 1R, может быть определен посредством использования следующего уравнения посредством вычитания второго члена правой стороны уравнения из первого члена правой стороны уравнения, при этом первый член является угловым моментом, получающимся в результате действия поперечной силы σy, а второй член является угловым моментом, получающимся в результате действия продольной силы σx.
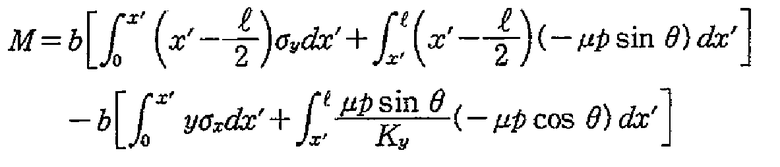
(уравнение 1)
С другой стороны, угловой момент Mfr, сформированный совместно посредством управляемых колес (передних колес) 1L, 1R, может быть определен посредством использования следующего уравнения на основе углового момента Mout на наружном колесе и углового момента Min на внутреннем колесе (восстанавливающего момента), который может быть определен посредством использования вышеприведенного уравнения.

(уравнение 2)
[0030] Когда выполняется управление движущей силой двигателя в состоянии руления по фиг. 2, угловой момент Mout на наружном колесе и угловой момент Min на внутреннем колесе (восстанавливающий момент) являются такими, как показано на фиг. 3C.
[0031] По сравнению с угловым моментом Mout' на наружном колесе для случая, в котором не выполняется управление движущей силой двигателя в состоянии руления по фиг. 2, угловой момент Mout на наружном колесе значительно увеличивается в большей степени за счет коррекции для увеличения крутящего момента двигателя в течение ранней стадии от момента t1 времени до момента t2 времени, как показано на фиг. 3C, и в результате имеет большую тенденцию к восстановлению за счет коррекции для уменьшения крутящего момента двигателя в течение средней стадии от момента t2 времени до момента t3 времени и поздней стадии от момента t3 времени до момента t4 времени.
[0032] С другой стороны, как показано на фиг. 3C, угловой момент Min на внутреннем колесе (восстанавливающий момент) для случая, в котором выполняется управление движущей силой двигателя в состоянии руления (коррекция для увеличения и уменьшения крутящего момента двигателя) по фиг. 2, не отличается существенно от углового момента Min' на внутреннем колесе (восстанавливающего момента) для случая, в котором не выполняется эта коррекция крутящего момента двигателя.
[0033] Соответственно, когда выполняется управление движущей силой двигателя в состоянии руления по фиг. 2, угловой момент, получающийся в результате разности между угловым моментом Mout на наружном колесе и угловым моментом Min на внутреннем колесе (восстанавливающий момент), становится большим в течение ранней стадии от момента t1 времени до момента t2 времени, и эффективная поперечная сила, полученная посредством деления (Mout-Min) на расстояние l от центра масс до оси, увеличивается в течение ранней стадии от момента t1 времени до момента t2 времени, как показано на фиг. 6. Как результат, разность (приращение) скорости поворота относительно вертикальной оси транспортного средства быстро повышается в течение ранней стадии от момента t1 времени до момента t2 времени, как указано посредством сплошной линии на фиг. 3B, так что скорость поворота относительно вертикальной оси может повышаться без задержки, и реакция при рулении (или способность к начальному повороту головной части) транспортного средства может быть значительно улучшена.
[0034] С другой стороны, в течение средней стадии от момента t2 времени до момента t3 времени и в течение поздней стадии от момента t3 времени до момента t4 времени, угловой момент Mout на наружном колесе имеет большую тенденцию к восстановлению, чем угловой момент Mout' на наружном колесе для случая, в котором не выполняется управление движущей силой двигателя в состоянии руления по фиг. 2. Это служит для того, чтобы обеспечивать возможность быстрого возврата поведения при движении на повороте транспортного средства к исходному.
[0035] С учетом вышеприведенных функций и преимуществ, величина увеличения за счет коррекции для увеличения крутящего момента двигателя, выполняемой в течение ранней стадии от момента t1 времени, когда начинается операция руления, до момента t2 времени, когда истек предварительно определенный период TM1s времени после момента t1 времени, как показано на фиг. 3A, должна быть достаточно большой, чтобы решить вышеописанную задачу. Тем не менее, естественно, что величина коррекции для увеличения крутящего момента электродвигателя предпочтительно задается таким образом, что пассажир транспортного средства не воспринимает ускорение и не чувствует себя некомфортно. Естественно, предпочтительно, чтобы предварительно определенный период TM1s времени задавался равным очень короткому периоду времени, к примеру, 0,1 секунды, что представляет собой минимальный период времени, требуемый для получения коррекции для увеличения крутящего момента двигателя эффективной настолько, чтобы улучшать реакцию при рулении, так что не допускается продолжение коррекции для увеличения крутящего момента двигателя после этого периода и формирование отрицательных эффектов.
[0036] Кроме того, величина коррекции для уменьшения крутящего момента двигателя, выполняемой в течение средней и поздней стадии от момента t2 времени до момента t4 времени, когда истек предварительно определенный период TM2s времени, как показано на фиг. 3A, должна быть достаточно большой, чтобы решить вышеописанную задачу по быстрому возвращению способности к повороту головной части, улучшенной на ранней стадии, до обычной. Тем не менее, естественно, что величина коррекции для уменьшения крутящего момента двигателя предпочтительно задается таким образом, что пассажир транспортного средства не воспринимает замедление и не чувствует себя некомфортно. Естественно, предпочтительно, чтобы предварительно определенный период TM2s времени задавался равным минимальному периоду времени, к примеру, 0,4 секунды, требуемому для того, чтобы достигать возврата способности к повороту головной части, за счет коррекции для уменьшения крутящего момента двигателя, с тем чтобы не допускать продолжения коррекции для уменьшения крутящего момента двигателя после этого периода и формирования отрицательных эффектов.
[0037] Когда выполняется управление движущей силой двигателя в состоянии руления по фиг. 2, формируются следующие преимущества в дополнение к вышеприведенным, как явно показано на фиг. 7, который показывает временные диаграммы в состоянии, идентичном состоянию на фиг. 3 и 6.
[0038] В частности, в случае, если не выполняется управление движущей силой двигателя в состоянии руления по фиг. 2, скорость V транспортного средства сразу падает после ранней стадии от момента t1 времени до момента t2 времени, как показано посредством пунктирной линии на фиг. 7A, так что угол наклона в продольном направлении транспортного средства увеличивается после ранней стадии от момента t1 времени до момента t2 времени, как показано посредством пунктирной линии на фиг. 7B. Это увеличение угла наклона в продольном направлении приводит к быстрому изменению разности угла крена в направлении увеличения угла крена. В случае электромобиля, ход подвески является относительно большим по причине, описанной выше, что приводит к проблеме того, что ощущение крена транспортного средства является плохим сразу после операции руления.
[0039] Напротив, в случае, если управление движущей силой двигателя в состоянии руления по фиг. 2 выполняется так, как в настоящем варианте осуществления, коррекция для увеличения крутящего момента двигателя в течение ранней стадии от момента t1 времени до момента t2 времени, описанная со ссылкой на фиг. 3A, приводит к временному увеличению скорости V транспортного средства в течение периода от ранней стадии до первой половины средней стадии.
[0040] Временное повышение скорости V транспортного средства служит для того, чтобы поддерживать угол наклона в продольном направлении транспортного средства равным значению в момент t1 времени, когда начинается операция руления, в течение периода до первой половины средней стадии. Поддержание угла наклона в продольном направлении приводит к тому, что разность угла крена задается равной значению в направлении уменьшения угла крена, в течение периода до первой половины средней стадии, как показано посредством сплошной линии на фиг. 7C, тем самым не допуская крена транспортного средства сразу после операции руления и тем самым улучшая ощущение крена транспортного средства сразу после операции руления.
[0041] Из вышеприведенного описания следует понимать, что настоящий вариант осуществления служит для того, чтобы получать преимущество улучшения поведения транспортного средства во время операции руления без изменения жесткости крепления устройства подвески или характеристик демпфирования амортизатора и тем самым решить намеченную задачу не вызывая новую проблему в отношении колебания и шума вследствие увеличения коэффициента жесткости устройства подвески.
[0042] Такой признак настоящего варианта осуществления, что определение того, выполняется или нет операция руления на этапе S11 по фиг. 2, реализуется посредством проверки на основе разности скорости ходовых колес между ходовыми колесами того, выполняется или нет операция руления левого и правого передних колес 1L, 1R, обеспечивает возможность быстро завершать определение относительно операции руления по сравнению со случаями, в которых определение реализуется посредством детектирования угла поворота колес, а также обеспечивает возможность выполнения коррекции для увеличения и уменьшения крутящего момента двигателя с быстрой реакцией, тем самым дополнительно обеспечивая функции и преимущества, описанные выше.
[0043] Кроме того, такой признак настоящего варианта осуществления, что величина коррекции для увеличения крутящего момента двигателя поддерживается в течение предварительно определенного периода времени, как указано посредством формы сигнала крутящего момента от момента t1 времени до момента t2 времени на фиг. 3A, во время коррекции для увеличения крутящего момента двигателя в состоянии руления, выполняемой на этапе S12 по фиг. 2, служит для того, чтобы поддерживать крутящий момент двигателя равным значению, увеличенному при операции руления, в течение предварительно определенного периода времени, и тем самым получать функции и преимущества, описанные выше, в течение длительного периода времени и улучшать реакцию при рулении и ощущение крена транспортного средства в течение предварительно определенного периода времени после момента t1 времени, когда выполняется операция руления.
[0044] Другие варианты осуществления
Хотя вышеприведенное описывает пример со ссылкой на чертежи, на которых настоящее изобретение применяется к транспортному средству, в котором приводятся во вращение управляемые левое и правое передние колеса 1L, 1R, настоящее изобретение может применяться к транспортному средству, в котором приводятся во вращение левое и правое задние колеса посредством двигателя вместо или в дополнение к левому и правому передним колесам 1L, 1R, или может применяться к транспортному средству, в котором ходовые колеса приводятся в движение посредством своих соответствующих электродвигателей. Также в таких случаях, очевидно, что функции и преимущества, описанные выше, могут быть получены посредством управления коррекцией для увеличения и уменьшения движущей силы по фиг. 2.
[0045] В этой связи источник энергии для приведения в движение ходовых колес не ограничивается вращательным источником электроэнергии, к примеру, электродвигателем 2, а может быть двигателем, к примеру, двигателем внутреннего сгорания. Также в таких случаях функции и преимущества, описанные выше, могут быть получены посредством управления коррекцией для увеличения и уменьшения движущей силы по фиг. 2. Тем не менее двигатели имеют более низкий отклик на управляющее воздействие, чем вращательные источники энергии, так что преимущественно управление коррекцией для увеличения и уменьшения движущей силы по фиг. 2 применяется к вращательному источнику электроэнергии, чтобы обеспечивать функции и преимущества, описанные выше.

Изобретение относится к области улучшения стабильности транспортных средств. Аппарат для улучшения поведения транспортного средства в состоянии руления содержит:
- средство детектирования операции руления, которое детектирует операцию руления для управления управляемым колесом транспортного средства; и
- средство увеличения движущей силы, которое временно увеличивает движущую силу на ходовом колесе в ответ на детектирование операции руления и уменьшает движущую силу через предварительно определенный период времени после увеличения движущей силы. Достигается улучшение реакции на руление или поведение при крене транспортного средства во время операции руления без изменения жесткости крепления устройства подвески или характеристик демпфирования амортизатора. 5 з.п. ф-лы, 7 ил.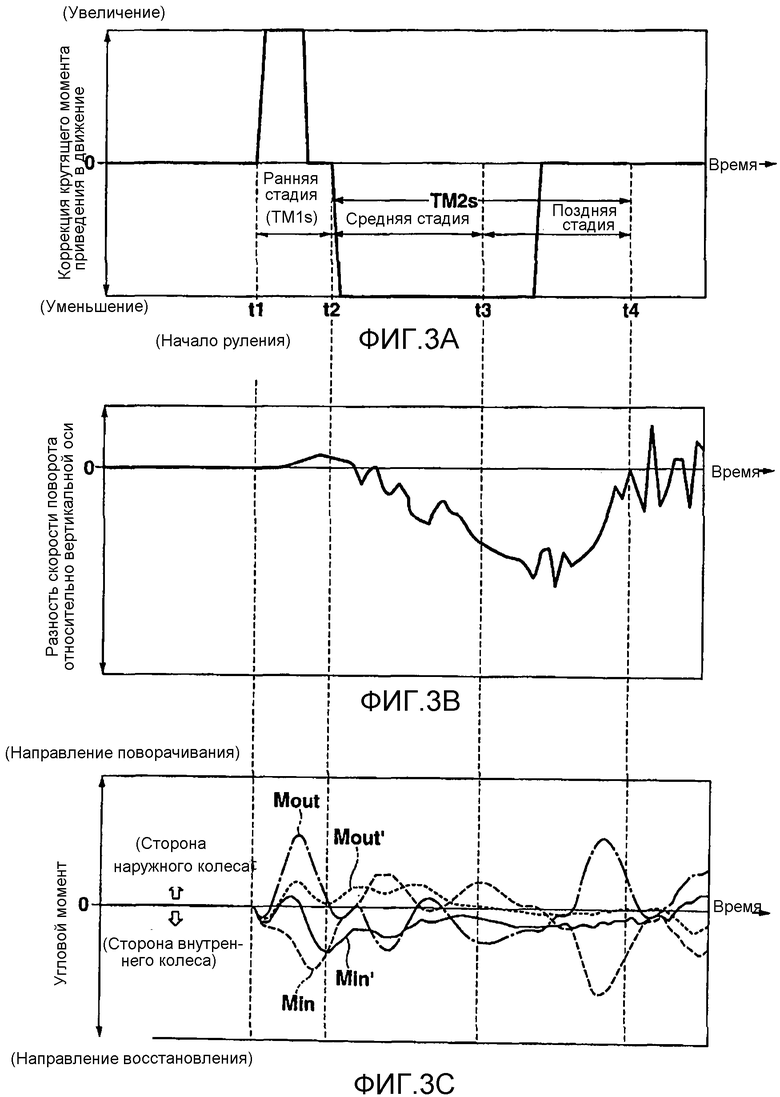
1. Аппарат для улучшения поведения транспортного средства в состоянии руления для транспортного средства, при этом транспортное средство может перемещаться с помощью ходового колеса, приводимого во вращение посредством движущей силы из источника энергии, причем аппарат для улучшения поведения транспортного средства в состоянии руления содержит:
- средство детектирования операции руления, которое детектирует операцию руления для управления управляемым колесом транспортного средства; и
- средство увеличения движущей силы, которое увеличивает движущую силу на ходовом колесе в ответ на детектирование операции руления посредством средства детектирования операции руления и уменьшает движущую силу через предварительно определенный период времени после увеличения движущей силы.
2. Аппарат для улучшения поведения транспортного средства в состоянии руления по п.1, в котором средство детектирования операции руления детектирует операцию руления на основе разности частоты вращения между множеством ходовых колес транспортного средства.
3. Аппарат для улучшения поведения транспортного средства в состоянии руления по п.1 или 2, в котором средство увеличения движущей силы поддерживает движущую силу при значении движущей силы, полученном посредством увеличения в течение предварительно определенного периода времени в ответ на детектирование операции руления.
4. Аппарат для улучшения поведения транспортного средства в состоянии руления по п.1 или 2, в котором увеличение движущей силы является таким, что пассажир транспортного средства не воспринимает ускорение.
5. Аппарат для улучшения поведения транспортного средства в состоянии руления по п.1 или 2, в котором средство увеличения движущей силы временно уменьшает увеличенную движущую силу до значения движущей силы, меньшего, чем перед увеличением, и после этого возвращает движущую силу до значения движущей силы перед увеличением.
6. Аппарат для улучшения поведения транспортного средства в состоянии руления по п.1 или 2, в котором:
- транспортное средство является электромобилем, в котором, по меньшей мере, часть движущей силы подается посредством электродвигателя; и
- средство увеличения движущей силы управляет увеличением движущей силы посредством электродвигателя.

