ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к аппарату для улучшения поведения при рулении транспортным средством, в частности поворота вокруг вертикальной оси и/или наклона относительно продольной оси, при этом транспортное средство способно двигаться с помощью ходового колеса, приводимого в движение движущей силой от источника энергии.
УРОВЕНЬ ТЕХНИКИ
[0002] В последние годы подрессоренная масса транспортного средства имеет тенденцию к увеличению, при этом подрессоренная масса находится на верхней стороне устройства подвески транспортного средства по некоторым причинам, при этом эти причины включают в себя потребность в низком расходе топлива, так что применяются экономящие топливо шины с небольшим сопротивлением качению, и добавляется устройство улучшения эффективности использования топлива, и требуется аккумуляторная батарея большой емкости, соответственно. Применение экономящих топливо шин ведет к уменьшению коэффициента трения между шиной и поверхностью дороги, тогда как увеличение подрессоренной массы ведет к увеличению хода подвески.
[0003] Как уменьшение коэффициента трения с поверхностью дороги, так и увеличение хода подвески имеют тенденцию делать так, что поворот вокруг вертикальной оси транспортного средства имеет нелинейную характеристику, когда выполняется операция руления для того, чтобы рулить управляемыми колесами, при этом поведение при повороте относительно вертикальной оси является поведением вокруг вертикальной оси, проходящей через центр массы транспортного средства. В частности, для электрического транспортного средства, которое обеспечивается энергией только посредством электромотора в качестве источника энергии, нелинейная характеристика поведения при повороте вокруг вертикальной оси является важной, поскольку такое электрическое транспортное средство оснащено большой и тяжелой аккумуляторной батареей в центральном месте под днищем кузова транспортного средства. Более того, увеличение хода подвески вызывает увеличение движения с креном транспортного средства, т.е. поведение наклона относительно продольной оси кузова транспортного средства.
[0004] Для улучшения поведения при повороте вокруг вертикальной оси, имеющего нелинейную характеристику, возможно, чтобы жесткость подвески была увеличена посредством использования эластичной втулки высокой жесткости или изолятора высокой жесткости в качестве части, к которой прикреплено устройство подвески, согласно технологии, которая описана в патентном документе 1. С другой стороны, для пресечения крена кузова транспортного средства возможно, чтобы эффективность демпфирования колебаний амортизатора устройства подвески была улучшена, например, с помощью технологии, которая описана в патентном документе 2.
[0005] Однако контрмера увеличения жесткости подвески или контрмера повышения эффективности демпфирования амортизатора вызывает увеличение коэффициента упругости устройства подвески и тем самым вызывает новую проблему относительно колебания и шума. Более того, контрмера повышения эффективности демпфирования амортизатора требует предоставления амортизатора с дополнительным механизмом регулировки демпфирующего усилия и добавления привода и других устройств для приведения в действие механизма регулировки демпфирующего усилия и тем самым вызывает нежелательное увеличение стоимости.
ДОКУМЕНТ(Ы) ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
Патентный документ(ы)
[0006] Патентный документ 1: JP 07-132720 A
Патентный документ 2: JP 2007-170590 A
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0007] Ввиду вышеизложенного целью настоящего изобретения является предложение аппарата улучшения поведения транспортного средства при рулении, способного улучшать поведение при повороте вокруг вертикальной оси и/или поведение при наклоне относительно продольной оси транспортного средства во время операции руления, не вызывая изменения в жесткости подвески или эффективности демпфирования амортизатора, а именно без создания новой проблемы относительно колебания и шума за счет увеличения коэффициента упругости устройства подвески и без вызывания проблемы роста стоимости за счет добавления механизма регулировки демпфирующего усилия и других устройств.
[0008] С этой целью, согласно настоящему изобретению, предлагается аппарат улучшения поведения транспортного средства при рулении для транспортного средства, при этом транспортное средство способно двигаться с помощью ходового колеса, приводимого в движение движущей силой от источника энергии, упомянутый аппарат улучшения поведения транспортного средства при рулении характеризуется содержанием: средства обнаружения операции руления, которое обнаруживает операцию руления при рулении рулевым колесом транспортного средства; и средство уменьшения движущей силы, которое временно уменьшает движущую силу к ходовому колесу через установленный период времени, после того как операция руления обнаружена средством обнаружения операции руления.
[0009] С помощью аппарата улучшения поведения транспортного средства при рулении согласно настоящему изобретению описанная выше проблема в том, что поведение при повороте относительно вертикальной оси транспортного средства становится нелинейным, может быть решена, поскольку временное увеличение движущей силы к ходовому колесу, когда установленный период времени истек после обнаружения операции руления, вызывает увеличение в возвращающем моменте управляемого колеса и уменьшение в поперечной силе управляемого колеса, после того как установленный период времени истек, и тем самым подавляет изменения скорости поворота вокруг вертикальной оси транспортного средства, когда операция руления выполняется.
[0010] Более того, согласно настоящему изобретению, признак временного уменьшения движущей силы к ходовому колесу через установленный период времени, после того как операция руления обнаружена, служит для увеличения скорости крена транспортного средства в ответ на изменение нагрузки на колесо, после того как установленный период времени истек, и тем самым увеличивает эффективность демпфирования посредством увеличения скорости хода амортизатора и пресекает движение с креном и тем самым решает проблему усугубления поведения при крене и улучшает ощущение крена транспортного средства непосредственно после операции руления.
[0011] Кроме того, согласно настоящему изобретению, возможно улучшать поведение транспортного средства, когда выполняется операция руления, не вызывая изменения в жесткости подвески или эффективности демпфирования амортизатора, а именно не вызывая новой проблемы относительно колебания и шума за счет увеличения коэффициента упругости устройства подвески и не вызывая проблемы роста стоимости посредством механизма регулировки демпфирования и т.п.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
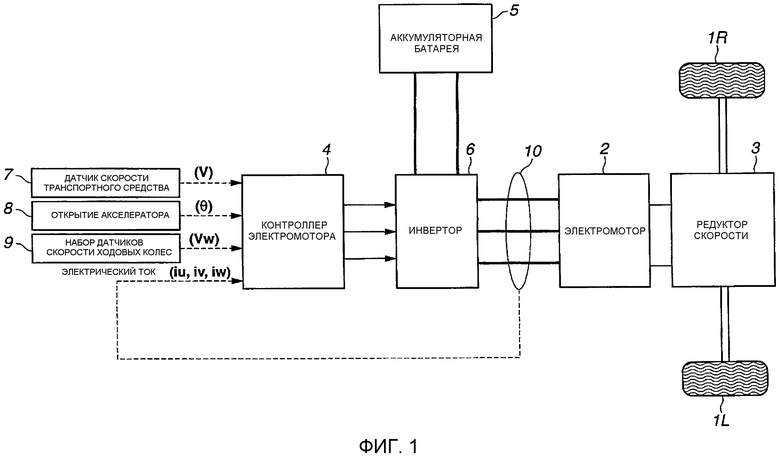
[0012] Фиг.1 - это схематический чертеж системы, показывающий систему привода транспортного средства и систему управления для системы привода, при этом транспортное средство снабжено аппаратом улучшения поведения транспортного средства при рулении согласно варианту осуществления настоящего изобретения.
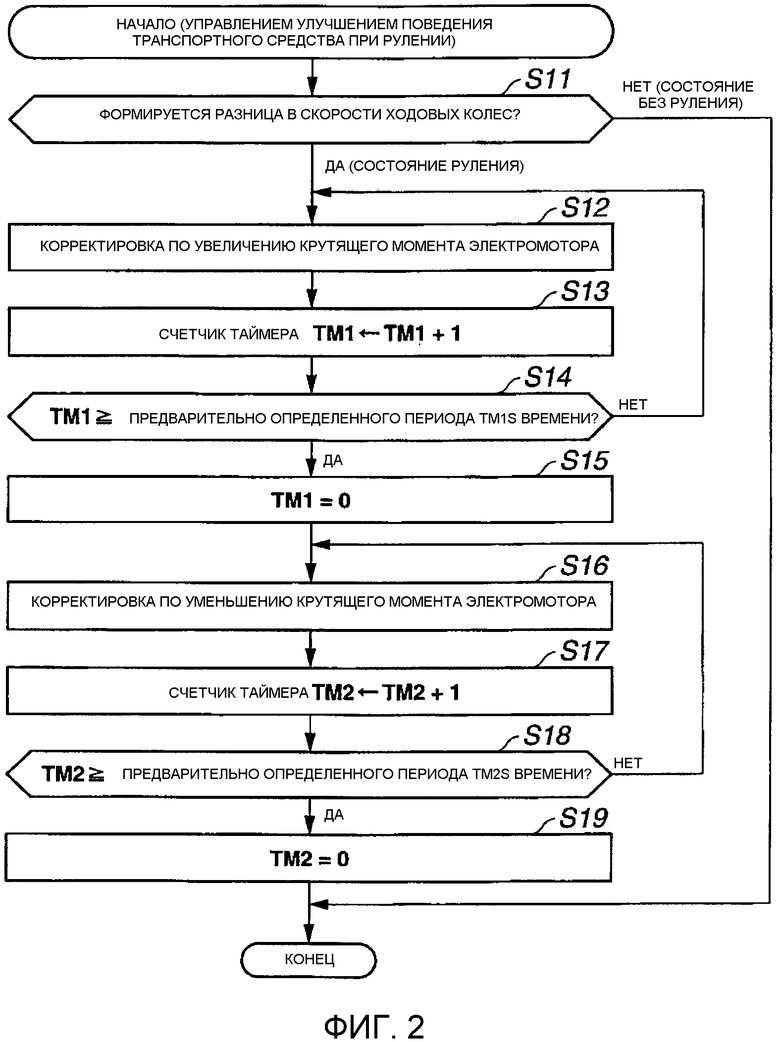
Фиг.2 - это блок-схема, показывающая программу улучшения поведения транспортного средства при рулении, выполняемую контроллером электромотора на Фиг.1.
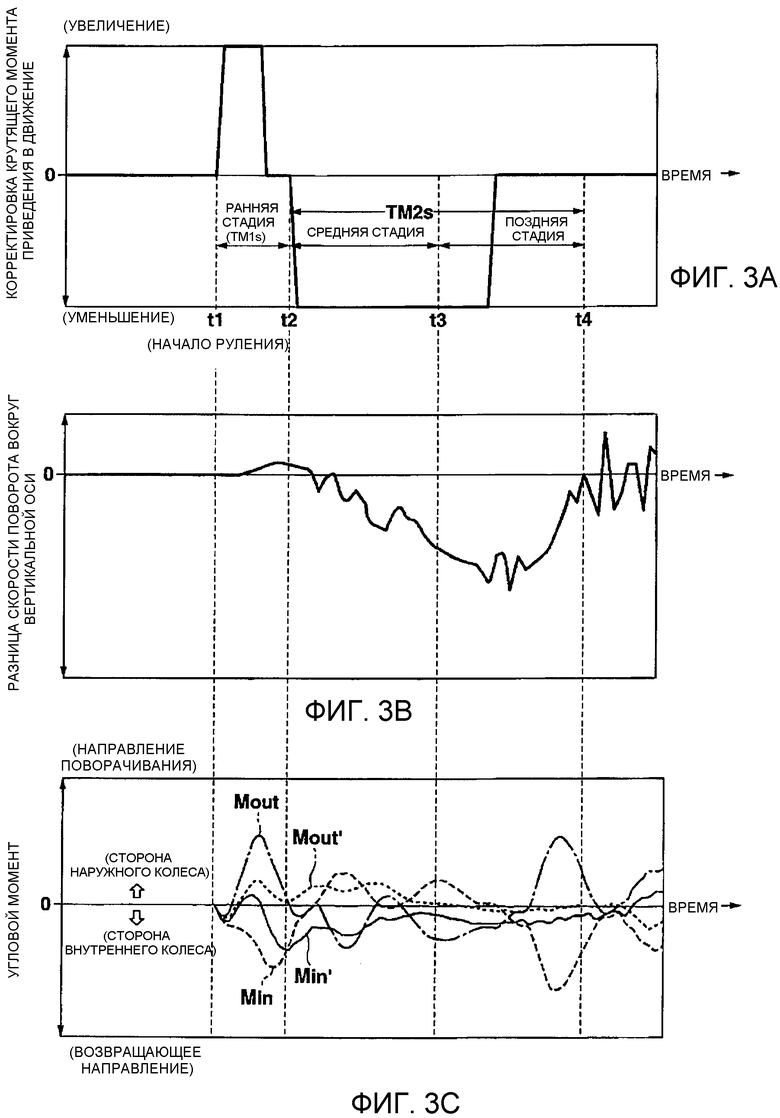
Фиг.3 - это временная диаграмма операции управления улучшением поведения транспортного средства при рулении на Фиг.2, при этом Фиг.3A - это временная диаграмма, показывающая изменение во времени корректировки крутящего момента привода, Фиг.3B - это временная диаграмма, показывающая изменение во времени разности скорости поворота вокруг вертикальной оси, и Фиг.3C - это временная диаграмма, показывающая изменение во времени углового момента, сформованного каждым управляемым колесом, в сравнении со случаем, в котором управление улучшением поведения транспортного средства при рулении на Фиг.2 не выполняется.
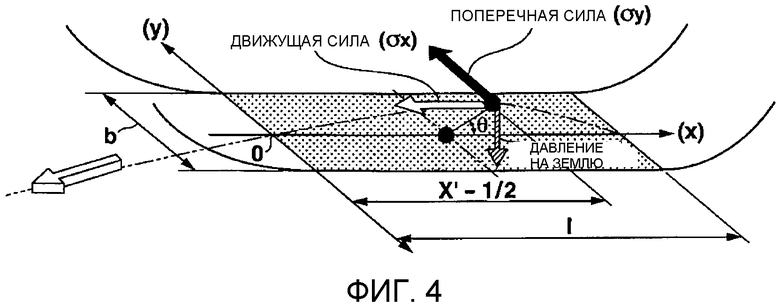
Фиг.4 - это пояснительный чертеж, показывающий характеристики управляемого колеса относительно контактной поверхности шины.
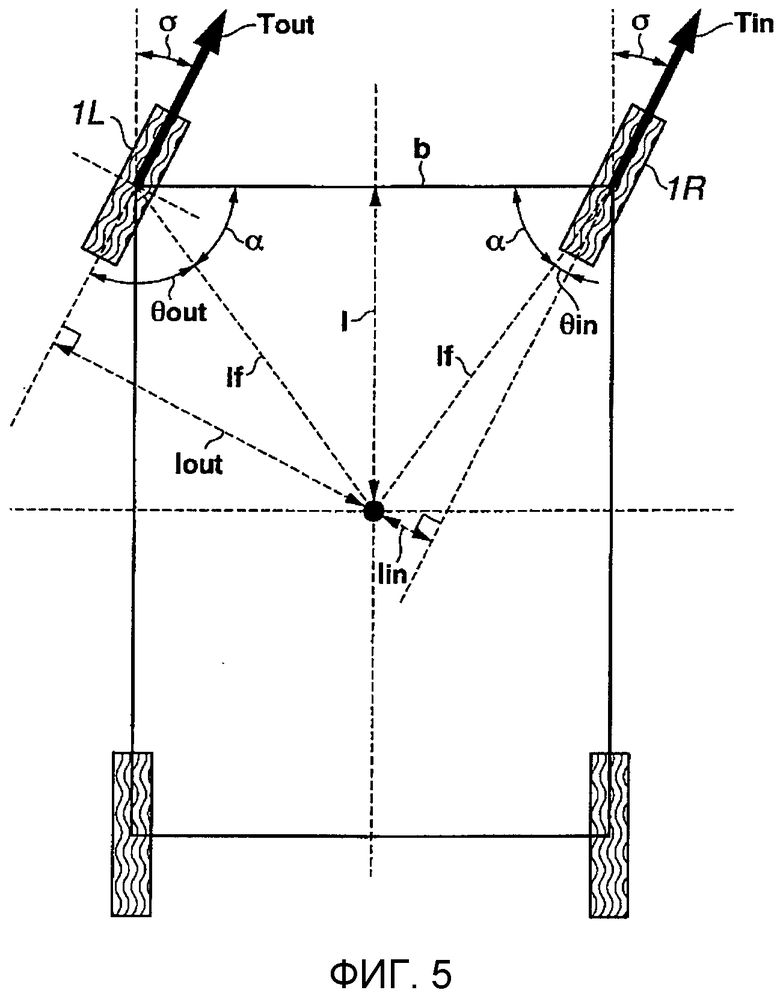
Фиг.5 - это пояснительный чертеж, показывающий характеристики транспортного средства.
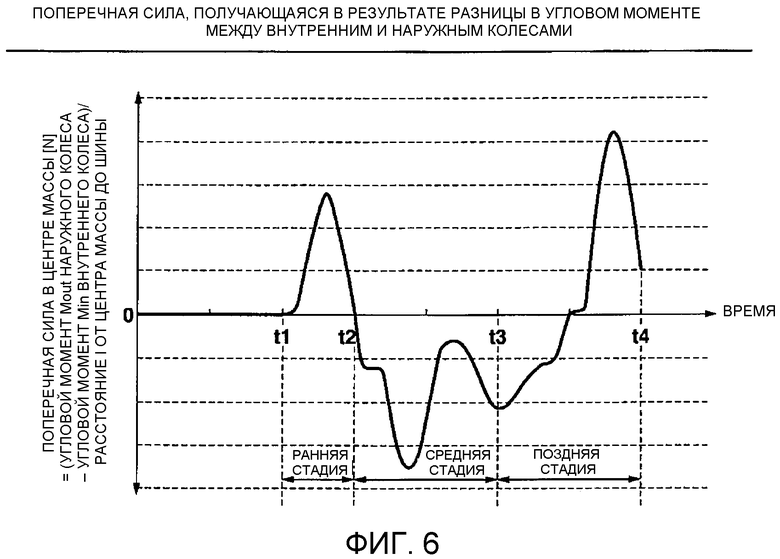
Фиг.6 - это временная диаграмма, показывающая изменение во времени поперечной силы, получающейся в результате разности в угловом моменте между внутренним и наружным колесами в случае, когда выполняется управление улучшением поведения транспортного средства при рулении на Фиг.2.
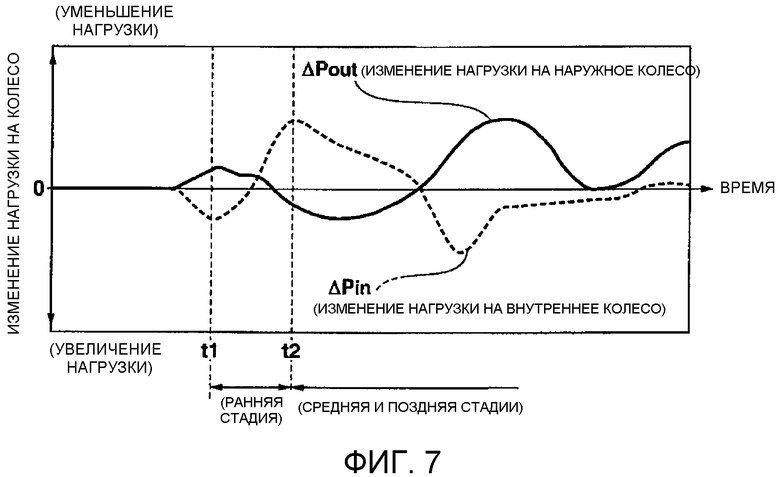
Фиг.7 - это временная диаграмма, показывающая изменения нагрузки во времени внутреннего и наружного колес, когда выполняется управление улучшением поведения транспортного средства при рулении на Фиг.2.
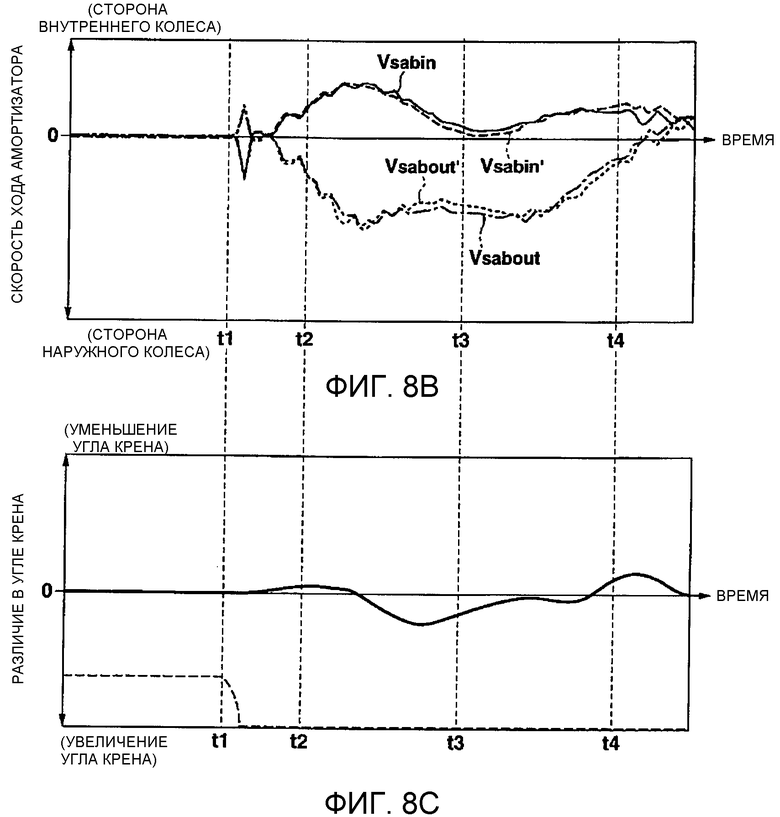
Фиг.8 - это временная диаграмма операции управления улучшением поведения транспортного средства при рулении на Фиг.2, при этом Фиг.8A - это временная диаграмма, показывающая изменение во времени корректировки крутящего момента привода, Фиг.8B - это временная диаграмма, показывающая изменение во времени скорости хода амортизатора в сравнении со случаем, в котором управление улучшением поведения транспортного средства при рулении на Фиг.2 не выполняется, и Фиг.8C - это временная диаграмма, показывающая изменение во времени различия в угле наклона относительно продольной оси в сравнении со случаем, в котором управление улучшением поведения транспортного средства при рулении на Фиг.2 не выполняется.
РЕЖИМ(Ы) ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0013] Последующее описывает режимы осуществления настоящего изобретения со ссылкой на вариант осуществления, показанный на чертежах.
<Конфигурация>
Фиг.1 - это схематический чертеж системы, показывающий систему привода транспортного средства и систему управления для системы привода, при этом транспортное средство снабжено аппаратом улучшения поведения транспортного средства при рулении согласно варианту осуществления настоящего изобретения. В варианте осуществления, транспортное средство на Фиг.1 является электрическим транспортным средством, которое способно двигаться с помощью ведущих левого и правого передних колес 1L, 1R, при этом левое и правое передние колеса 1L, 1R являются управляемыми колесами. Приведение в движение левого и правого передних колес 1L, 1R осуществляется приведением в движение левого и правого передних колес 1L, 1R посредством электромотора 2 в качестве источника энергии, через редуктор 3 скорости, при этом редуктор 3 скорости включает в себя дифференциал.
[0014] Движущая сила электромотора 2 управляется контроллером 4 электромотора, который выполняет DC-AC-преобразование энергии от аккумуляторной батареи 5 в качестве источника энергии посредством инвертора 6 и подает AC-энергию к электромотору 2 под управлением инвертора 6, с тем чтобы согласовывать крутящий момент электромотора 2 с целевым крутящим моментом электромотора в результате вычисления, полученного посредством контроллера 4 электромотора.
[0015] Если целевой крутящий момент электромотора как результат вычисления, полученный посредством контроллера 4 электромотора, имеет отрицательную полярность, что требует операции рекуперативного торможения электромотора 2, тогда контроллер 4 электромотора подает нагрузку генерирования к электромотору 2 через инвертор 6 и выполняет AC-DC-преобразование энергии, сгенерированной посредством операции рекуперативного торможения электромотора 2, и заряжает аккумуляторную батарею 5.
[0016] Контроллер 4 электромотора принимает входную информацию, используемую для вычисления целевого крутящего момента электромотора, описанного выше. Информация включает в себя сигнал от датчика 7 скорости транспортного средства, который обнаруживает скорость V транспортного средства, которая является скоростью электрического транспортного средства относительно земли, и сигнал от датчика 8 открытия акселератора, который обнаруживает открытие θ акселератора (требуемую нагрузку электромотора), создаваемое посредством операции приведения в движение, и сигнал от набора 9 датчиков скорости ходовых колес, который обнаруживает индивидуальные скорости Vw ходовых колес для левого и правого передних колес 1L, 1R и не показанных левого и правого задних колес, и сигнал от датчика 10 электрического тока, который обнаруживает электрические токи электромотора 2 (электрические токи iu, iv, iw на Фиг.1 для создания трехфазных переменных токов, состоящих из U-фазы, V-фазы и W-фазы).
[0017] Контроллер 4 электромотора формирует PWM-сигнал для управления электромотором 2 на основе вышеописанной информации и формирует возбуждающий сигнал для инвертора 6 посредством схемы возбуждения на основе PWM-сигнала. Например, инвертор 6 состоит из двух переключающих элементов (например, мощных полупроводниковых элементов, таких как IGBT) для каждой фазы и подает желаемый ток к электромотору 2, в то же время включая/выключая переключающие элементы на основе возбуждающего сигнала и выполняя преобразование постоянного тока, подаваемого от аккумуляторной батареи 5, в переменный и выполняя обратное преобразование.
[0018] Электромотор 2 формирует движущую силу на основе переменного (AC)тока, подаваемого от инвертора 6, и передает движущую силу левому и правому передним колесам 1L, 1R (левому и правому управляемым колесам) через редуктор 3 скорости. В то время как транспортное средство движется так, что электромотор 2 приводится во вращение посредством левого и правого передних колес 1L, 1R, т.е. электромотор 2 находится в так называемом состоянии обратного привода, электромотор 2 обеспечивается нагрузкой генерирования, чтобы выполнять операцию рекуперативного торможения, и регенерирует кинетическую энергию транспортного средства и заряжает аккумуляторную батарею 5.
[0019] <Управление улучшением поведения транспортного средства при рулении>
Контроллер 4 электромотора выполняет программу управления, показанную на Фиг.2, и выполняет управление улучшением поведения транспортного средства при рулении посредством управления движущей силой электромотора 2.
[0020] На этапе S11, контроллер 4 электромотора проверяет, выполняется или нет операция руления управляемыми левым и правым передними колесами 1L, 1R, определяя, на основе скорости Vw ходового колеса для каждого ходового колеса, обнаруженной набором 9 датчиков скорости ходовых колес, является или нет разница в скорости ходового колеса между левым и правым передними колесами 1L, 1R или разница в скорости ходового колеса между передними и непоказанными задними колесами, а именно разница между средней скоростью ходового колеса для левого и правого передних колес 1L, 1R и средней скоростью ходового колеса для непоказанных левого и правого задних колес, выше порогового значения для определения операции руления. Соответственно, этап S11 соответствует средству обнаружения операции руления в настоящем изобретении.
[0021] В состоянии без операции руления, в котором определяется, что разница в скорости ходового колеса меньше, чем установленное значение, не нужно выполнять управление улучшением поведения транспортного средства при рулении, так что контроллер 4 электромотора выходит из программы управления на Фиг.2. В состоянии операции руления, в котором определяется, что разница в скорости ходового колеса больше или равна установленному значению, необходимо выполнять управление улучшением поведения транспортного средства при рулении, так что контроллер 4 электромотора переходит к этапу S12 и последующим этапам, на которых контроллер 4 электромотора выполняет управление улучшением поведения транспортного средства при рулении посредством управления движущей силой электромотора 2 следующим образом.
[0022] На этапе S12, контроллер 4 электромотора выполняет увеличивающую коррекцию крутящего момента электромотора для корректировки целевого крутящего момента электромотора посредством приращения корректировки крутящего момента привода непосредственно после момента t1 времени, когда операция руления начинается, как представлено формой сигнала согласно непрерывной линии на Фиг.3A, при этом целевой крутящий момент электромотора 2 определяется на основе скорости V транспортного средства и открытия APO акселератора с помощью подготовленной таблицы соответствия крутящего момента электромотора.
[0023] На последующем этапе S13 контроллер 4 электромотора увеличивает счетчик TM1 таймера и, таким образом, измеряет период времени, прошедший после момента t1 времени, когда увеличивающая корректировка крутящего момента электромотора началась (когда началась операция руления). На этапе S14 контроллер 4 электромотора проверяет, указывает или нет счетчик TM1 таймера предварительно определенный период TM1s времени, а именно достигнут или нет момент t2 времени на Фиг.3A, после того как предварительно определенный период TM1s времени прошел после момента t1 времени, когда увеличивающая корректировка крутящего момента электромотора началась (когда операция руления началась).
[0024] Пока на этапе S14 не будет определено, что TM1≥TM1s (момент t2 времени на Фиг.3 достигнут, после того как предварительно определенный период TM1s времени прошел после момента t1 времени, когда увеличивающая корректировка крутящего момента электромотора началась), контроллер 4 электромотора возвращает управление к этапам S12 и S13, так что контроллер 4 электромотора продолжает увеличивающую корректировку крутящего момента электромотора на основе формы сигнала согласно непрерывной линии на Фиг.3A на этапе S12 и измеряет период времени продолжения увеличивающей корректировки крутящего момента электромотора на этапе S13.
[0025] В момент t2 времени на Фиг.3A, когда определено на этапе S14, что TM1≥TM1s (увеличивающая корректировка крутящего момента электромотора выполнялась точно в течение предварительно определенного периода времени TM1s), контроллер 4 электромотора переводит управление дальше к этапам S15-S17. На этапе S15, контроллер 4 электромотора сбрасывает счетчик TM1 таймера для следующего выполнения. На этапе S16, контроллер 4 электромотора выполняет уменьшающую корректировку крутящего момента электромотора для корректировки целевого крутящего момента электромотора посредством уменьшения корректировки крутящего момента привода непосредственно после момента t2 времени, когда увеличивающая корректировка крутящего момента электромотора завершилась, как представлено формой сигнала согласно непрерывной линии на Фиг.3A. Соответственно, этап S16 соответствует средству уменьшения движущей силы в настоящем изобретении. На последующем этапе S17, контроллер 4 электромотора увеличивает счетчик TM2 таймера и, таким образом, измеряет период времени, прошедший после момента t2 времени, когда уменьшающая корректировка крутящего момента электромотора началась.
[0026] На этапе S18, контроллер 4 электромотора проверяет, указывает или нет счетчик TM2 таймера предварительно определенный период TM2s времени, а именно достигнут или нет момент t4 времени на Фиг.3A, после того как предварительно определенный период TM2s времени прошел после момента t2 времени, когда уменьшающая корректировка крутящего момента электромотора началась. Пока на этапе S18 не будет определено, что TM2≥TM2s (момент t4 времени на Фиг.3 достигнут, после того как предварительно определенный период TM2s времени прошел после момента t2 времени, когда уменьшающая корректировка крутящего момента электромотора началась), контроллер 4 электромотора возвращает управление к этапам S16 и S17, так что контроллер 4 электромотора продолжает уменьшающую корректировку крутящего момента электромотора на основе формы сигнала согласно непрерывной линии на Фиг.3А на этапе S16 и измеряет период времени продолжения уменьшающей корректировки крутящего момента электромотора на этапе S17.
[0027] В момент t4 времени на Фиг.3A, когда определено на этапе S18, что TM2≥TM2s (уменьшающая корректировка крутящего момента электромотора выполнялась точно в течение предварительно определенного периода TM2s времени), контроллер 4 электромотора перемещает управление на этапе S19. На этапе S19 контроллер 4 электромотора сбрасывает счетчик TM2 таймера для следующего выполнения.
[0028] Посредством управления движущей силой электромотора для электромотора 2, показанного на Фиг.2, крутящий момент электромотора управляется до значения, полученного посредством временного увеличения, представленного формой сигнала согласно непрерывной линии на Фиг.3A, относительно установленного крутящего момента электромотора во время периода от момента t1 времени, когда операция руления началась, до момента t2 управления, когда предварительно определенный период TM1s времени прошел после момента t1 времени на Фиг.3A, и управляется до значения, полученного посредством временного уменьшения, представленного формой сигнала согласно непрерывной линии на Фиг.3A, относительно целевого крутящего момента электромотора во время периода от момента t2 времени, когда увеличивающая корректировка крутящего момента электромотора завершилась, до момента t4 времени, когда предварительно определенный период TM2s времени прошел после момента t2 времени на Фиг.3A.
[0029] <Функции и эффекты>
Вышеупомянутое управление движущей силой электромотора служит для улучшения поведения транспортного средства при рулении следующим образом.
[0030] В случае, когда характеристики относительно контактной поверхности шины являются такими, как показано на Фиг.4, а характеристики транспортного средства являются такими, как показано на Фиг.5, угловой момент M, созданный отдельным управляемым колесом (передним колесом) 1L, 1R, может быть определен с помощью следующего уравнения посредством вычитания второго выражения с правой стороны уравнения из первого выражения с правой стороны уравнения, при этом первое выражение является угловым моментом, получающимся в результате действия поперечной силы σy, а второе выражение является угловым моментом, получающимся в результате действия продольной силы σx.

(Уравнение 1)
С другой стороны, угловой момент Mfr, созданный совместно управляемыми колесами (передними колесами) 1L, 1R, может быть определен с помощью следующего уравнения на основе углового момента Mout наружного поворачивающего колеса и углового момента (возвращающего момента) Min внутреннего поворачивающего колеса, которые могут быть определены с помощью вышеприведенного уравнения.
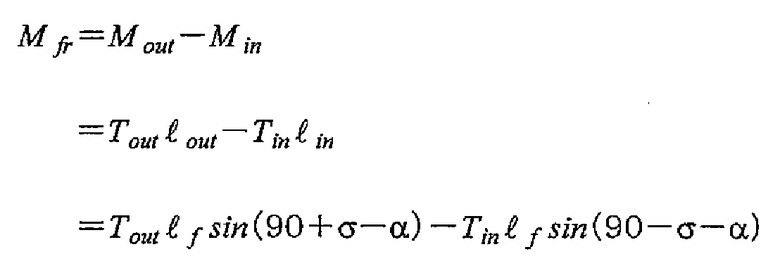
(Уравнение 2)
[0031] Когда управление движущей силой электромотора при рулении на Фиг.2 выполняется, угловой момент Mout наружного поворачивающего колеса и угловой момент (возвращающий момент) Min внутреннего поворачивающего колеса являются такими, как показано на Фиг.3C.
[0032] По сравнению с угловым моментом Mout' наружного поворачивающего колеса для случая, когда управление движущей силой электромотора при рулении на Фиг.2 не выполняется, угловой момент Mout наружного поворачивающего колеса значительно увеличивается посредством увеличивающей корректировки крутящего момента электромотора во время ранней стадии от момента t1 времени до момента t2 времени, как показано на Фиг.3C, и становится имеющим более возвращающую тенденцию за счет уменьшающей корректировки крутящего момента электромотора во время средней стадии от момента t2 времени до момента t3 времени и поздней стадии от момента t3 времени до момента t4 времени.
[0033] С другой стороны, как показано на Фиг.3C, угловой момент (возвращающий момент) Min внутреннего поворачивающего колеса для случая, когда управление движущей силой электромотора при рулении (увеличивающая и уменьшающая корректировка крутящего момента электромотора) на Фиг.2 выполняется, не отличается значительно от углового момента (возвращающего момента) Min' внутреннего поворачивающего колеса для случая, когда эта корректировка крутящего момента электромотора не выполняется.
[0034] Соответственно, когда управление движущей силой электромотора при рулении на Фиг.2 выполняется, угловой момент, получающийся в результате разницы между угловым моментом Mout наружного поворачивающего колеса и угловым моментом (возвращающим моментом) Min внутреннего поворачивающего колеса, становится больше во время ранней стадии от момента t1 времени до момента t2 времени, и наблюдаемая поперечная сила, полученная посредством деления (Mout-Min) на расстояние l от центра массы до оси, увеличивается во время ранней стадии от момента t1 времени до момента t2 времени, как показано на Фиг.6. В результате, разница в скорости поворота вокруг вертикальной оси транспортного средства быстро растет во время ранней стадии от момента t1 времени до момента t2 времени, как указано непрерывной линией на Фиг.3B, так что скорость поворота вокруг вертикальной оси может увеличиваться без задержки, и что реакция поворачивания передней части транспортного средства, когда транспортное средство управляется рулем (или первоначальная возможность поворота головной части), а именно реакция руления, может быть значительно улучшена.
[0035] С другой стороны, во время средней стадии от момента t2 времени до момента t3 времени и во время поздней стадии от момента t3 времени до момента t4 времени, угловой момент Mout наружного поворачивающего колеса имеет большую возвращающую тенденцию, чем угловой момент Mout' наружного поворачивающего колеса для случая, когда управление движущей силой электромотора при рулении на Фиг.2 не выполняется, так что возвращающий момент посредством управляемых колес 1L, 1R увеличивается, и наблюдаемая поперечная сила управляемых колес уменьшается во время средней стадии и во время поздней стадии от момента t2 времени до момента t4 времени, как показано на Фиг.6.
[0036] Таким образом, большое изменение скорости поворота вокруг вертикальной оси, созданное во время операции руления транспортного средства (в настоящем варианте осуществления эта тенденция является сильной, поскольку скорость поворота вокруг вертикальной оси быстро повышается во время ранней стадии от момента t1 времени до момента t2 времени, как описано выше), может быть пресечено, и, таким образом, поведение при повороте вокруг вертикальной оси транспортного средства может быть задано как имеющее линейную характеристику. Это служит для решения проблемы, описанной выше, в том, что поведение при повороте вокруг вертикальной оси транспортного средства задается имеющим нелинейную характеристику и позволяет поведению транспортного средства при повороте быстро возвращаться к исходному.
[0037] Принимая во внимание вышеописанные функции и эффекты, величина увеличения посредством увеличивающей корректировки крутящего момента электромотора, выполненной во время ранней стадии от момента t1 времени до момента t2 времени, когда предварительно определенный период TM1s времени прошел после момента t1 времени, как показано на Фиг.3A, должна быть достаточно большой, чтобы достигать цели, описанной выше. Однако, естественно, величина увеличивающей корректировки крутящего момента электромотора предпочтительно устанавливается так, что пассажиру транспортного средства не удается ощутить ускорение и не удается почувствовать дискомфорт. Естественно, предпочтительно, чтобы предварительно определенный период TM1s времени был установлен в очень короткий период времени, такой как 0,1 секунды, что является минимальным требуемым периодом времени, для которого требуется увеличивающая корректировка крутящего момента электромотора, чтобы улучшать реакцию руления, так что после этого периода предотвращается продолжение увеличивающей корректировки крутящего момента электромотора и создание неблагоприятных воздействий.
[0038] Более того, величина уменьшающей корректировки крутящего момента электромотора, выполненной во время средней и поздней стадий от момента t2 времени до момента t4 времени, когда предварительно определенный период времени TM2s прошел, как показано на Фиг.3A, должна быть достаточно большой, чтобы достигать цели, описанной выше, по пресечению большого изменения скорости поворота вокруг вертикальной оси, формируемого во время операции руления транспортного средства, так что поведение при повороте транспортного средства вокруг вертикальной оси задается как имеющее линейную характеристику, и чтобы достигать цели быстрого возврата возможности поворота головной части, улучшенной на ранней стадии, к обычной. Однако, естественно, величина уменьшающей корректировки крутящего момента электромотора предпочтительно задается так, что пассажиру транспортного средства не удается ощутить торможение и не удается почувствовать дискомфорт.
[0039] Естественно, предпочтительно, чтобы предварительно определенный период TM2s времени был установлен в минимальный период времени, такой как 0,4 секунды, требуемый, чтобы задавать поведение при повороте вокруг вертикальной оси имеющим линейную характеристику, и выполнять возврат возможности поворота головной части посредством уменьшающей корректировки крутящего момента электромотора, чтобы предотвращать продолжение уменьшающей корректировки крутящего момента электромотора после этого периода и создание неблагоприятных воздействий.
[0040] Когда управление движущей силой электромотора при рулении на Фиг.2 выполняется, следующие действия создаются в дополнение к упомянутым выше, как ясно показано на Фиг.7 и Фиг.8A, 8B и 8C, которые показывают временные диаграммы в тех же условиях, что и на Фиг.3 и 6.
[0041] В частности, в случае, когда управление движущей силой электромотора при рулении на Фиг.2 выполняется, нагрузка на наружное колесо во время движения в повороте изменяется, как показано посредством ΔPout на Фиг.7 после момента t1 времени, когда операция руления началась, относительно случая, когда управление движущей силой электромотора при рулении на Фиг.2 не выполняется. Одновременно нагрузка на внутреннее колесо во время движения в повороте изменяется, как показано посредством ΔPin на Фиг.7 после момента t1 времени, когда операция руления началась, относительно случая, когда управление движущей силой электромотора при рулении на Фиг.2 не выполняется. В частности после момента t2 времени на Фиг.7 (во время средней и последней стадий), изменение ΔPout нагрузки на наружное колесо и изменение ΔPin нагрузки на внутреннее колесо увеличиваются посредством уменьшающей корректировки крутящего момента электромотора на этапе S16 на Фиг.2.
[0042] Изменение ΔPout нагрузки на наружное колесо и изменение ΔPin нагрузки на внутреннее колесо служат росту скорости крена транспортного средства, так что из амортизаторов, ассоциированных с левым и правым передними колесами 1L, 1R, скорость хода амортизатора Vsabout наружного колеса становится более быстрой, чем скорость Vsabout' хода амортизатора наружного колеса для случая, когда управление движущей силой электромотора при рулении на Фиг.2 не выполняется, во время средней и поздней стадий после момента t2 времени, как показано на Фиг.8B, тогда как скорость Vsabin хода амортизатора внутреннего колеса становится более быстрой, чем скорость Vsabin' хода амортизатора внутреннего колеса для случая, когда управление движущей силой электромотора при рулении на Фиг.2 не выполняется, во время средней и поздней стадий после момента t2 времени, как показано на Фиг.8B.
[0043] Кстати, амортизатор формирует усилие демпфирования колебаний посредством сопротивления замещающему потоку рабочей жидкости, протекающей через отверстие в поршне, во время хода амортизатора. Соответственно, когда скорость перемещения увеличивается, усилие демпфирования колебания увеличивается, чтобы формировать большее усилие для пресечения крена транспортного средства.
[0044] В случае, когда управление движущей силой электромотора при рулении на Фиг.2 не выполняется, скорость Vsabout' хода амортизатора наружного колеса и скорость Vsabin' хода амортизатора внутреннего колеса являются низкими во время средней и поздней стадий после момента t2 времени, как показано на Фиг.8B. Соответственно, в случае, когда управление движущей силой электромотора при рулении на Фиг.2 не выполняется, сила, пресекающая крен, основанная на усилии демпфирования колебания амортизатора во время этого периода, является относительно небольшой, и ход подвески является относительно большим в случае электрического транспортного средства, так что угол крена остается большим, как указано прерывистой линией на Фиг.8C, вызывая проблему в том, что ощущение крена транспортного средства является плохим во время операции руления.
[0045] В отличие от этого, в случае, когда управление движущей силой электромотора при рулении на Фиг.2 выполняется как в настоящем варианте осуществления, по причинам, описанным выше, скорость Vsadout хода амортизатора наружного колеса становится более быстрой, чем скорость Vsabout' хода амортизатора наружного колеса в случае, когда управление движущей силой электромотора при рулении на Фиг.2 не выполняется, во время средней и последней стадий после момента t2 времени, как показано на Фиг.8B, тогда как скорость Vsabin хода амортизатора внутреннего колеса становится более быстрой, чем скорость Vsabin' хода амортизатора внутреннего колеса в случае, когда управление движущей силой электромотора при рулении на Фиг.2 не выполняется, во время средней и поздней стадий после момента t2 времени, как показано на Фиг.8B. Соответственно, во время этого периода, сила, пресекающая крен, основанная на усилии демпфирования колебания амортизатора, увеличивается, так что угол крена может быть задан небольшим, как показано непрерывной линией на Фиг.8C, улучшая ощущение крена транспортного средства во время операции руления, даже в случае, когда транспортное средство является электрическим транспортным средством, в котором ход подвески большой.
[0046] Улучшение ощущения крена транспортного средства может быть получено также посредством увеличивающей корректировки крутящего момента электромотора во время ранней стадии от момента t1 времени до момента t2 времени, описанных со ссылкой на Фиг.3A. А именно, хотя не показано на чертежах, увеличивающая корректировка крутящего момента электромотора во время ранней стадии от момента t1 времени до момента t2 времени является такой, что пассажиру не удается ощутить ускорение, однако вызывая временное увеличение в скорости транспортного средства во время ранней стадии и первой половины средней стадии.
[0047] Временный рост скорости транспортного средства служит поддержанию угла поперечного наклона транспортного средства в значении в момент t1 времени, когда операция руления началась, во время ранней стадии и первой половины средней стадии. Удерживание угла поперечного наклона является причиной того, что разница в угле крена между левым и правым передними колесами 1L, 1R устанавливается в значение в направлении уменьшения угла крена во время ранней стадии и первой половины средней стадии, таким образом, предохраняя транспортное средство от крена непосредственно после момента t1 времени, когда операция руления началась, и, таким образом, улучшая ощущение крена транспортного средства непосредственно после того, как операция руления началась.
[0048] Как ясно понятно из предшествующего описания, настоящий вариант осуществления служит для получения эффекта улучшения поведения транспортного средства во время операции руления без изменения в жесткости подвески или эффективности демпфирования амортизатора и тем самым достигает намеченной цели без возникновения новой проблемы относительно колебания и шума за счет увеличения коэффициента упругости устройства подвески и без возникновения проблемы роста стоимости за счет добавления механизма регулировки демпфирующего усилия и других устройств.
[0049] Признак настоящего варианта осуществления того, что определение, выполняется или нет операция руления на этапе S11 на Фиг.2, реализуется посредством проверки на основе разности в скорости ходового колеса между ходовыми колесами того, выполняется или нет операция руления левым и правым передними колесами 1L, 1R, позволяет быстро выполнять определение относительно операции руления по сравнению со случаями, когда определение реализуется посредством обнаружения угла поворота рулевого колеса, а также позволяет увеличивающей и уменьшающей корректировке крутящего момента электромотора выполняться с высокой ответной реакцией, тем самым дополнительно гарантируя функции и эффекты, описанные выше.
[0050] Кроме того, признак настоящего варианта осуществления того, что величина увеличивающей корректировки крутящего момента электромотора сохраняется в течение предварительно определенного периода времени, как показано формой волны крутящего момента от момента t1 времени до момента t2 времени на Фиг.3A, во время увеличивающей корректировки крутящего момента электромотора при рулении, выполняемой на этапе S12 на Фиг.2, служит для удержания крутящего момента электромотора в значении, увеличенном при операции руления, в течение предварительно определенного периода времени, и, тем самым, получает функции и эффекты, описанные выше в течение длительного периода времени, и улучшает реакцию руления и ощущение крена транспортного средства в течение предварительно определенного периода времени после момента t1 времени, когда операция руления выполняется.
[0051] Кроме того, признак настоящего варианта осуществления того, что во время уменьшающей корректировки крутящего момента электромотора при рулении, выполняемой на этапе S16, после того как определено на этапе S14, что увеличивающая корректировка крутящего момента электромотора выполнялась точно в течение предварительно определенного периода TM1s времени, величина уменьшающей корректировки крутящего момента электромотора сохраняется в течение предварительно определенного периода времени, как показано формой волны крутящего момента от момента t2 времени до момента t4 времени на Фиг.3A, служит для удержания крутящего момента электромотора в уменьшенном значении в течение предварительно определенного периода времени после момента t2 времени, когда предварительно определенный период TM1s времени прошел. Это служит для того, чтобы заставлять функции и эффекты продолжаться в течение более длительного периода времени, при этом функции и действия являются функциями и эффектами уменьшающей корректировки крутящего момента электромотора при рулении, описанными выше, т.е. функциями и эффектами, чтобы делать поведение при повороте вокруг вертикальной оси имеющим линейную характеристику, в то же время пресекая крен транспортного средства. Это надежно улучшает поведение транспортного средства при рулении во время средней и поздней стадий после момента t2 времени.
[0052] <Другой вариант(ы) осуществления>
Хотя предшествующее описание описывает пример со ссылкой на чертежи, на которых настоящее изобретение применено к транспортному средству, в котором управляемое левое и правое передние колеса 1L, 1R являются приводимыми в движение, настоящее изобретение может быть применено к транспортному средству, в котором левое и правое задние колеса являются приводимыми в движение посредством электромотора вместо или в дополнение к левому и правому передним колесам 1L, 1R, или может быть применено к транспортному средству, в котором ходовые колеса приводятся в движение их соответствующими электромоторами. Также в таких случаях очевидно, что функции и эффекты, описанные выше, могут быть получены посредством управления увеличивающей и уменьшающей корректировкой движущей силы на Фиг.2.
[0053] Кстати, источник энергии для приведения в движение ходовых колес не ограничен роторным источником электрической энергии, таким как электромотор 2, а может быть двигателем, таким как двигатель внутреннего сгорания. Также в таких случаях функции и эффекты, описанные выше, могут быть получены посредством управления увеличивающей и уменьшающей корректировкой движущей силы на Фиг.2. Однако двигатели внутреннего сгорания имеют более низкую реакцию на управление, чем роторные источники энергии, так что полезно, что управление увеличивающей и уменьшающей корректировкой движущей силы на Фиг.2 применяется к роторному источнику электрической энергии, чтобы обеспечивать функции и эффекты, описанные выше.
Изобретение относится к области управления транспортным средством. Аппарат улучшения поведения транспортного средства при рулении содержит контроллер электромотора ходовых колес и датчики скорости ходовых колес для обнаружения операции руления, уменьшения движущей силы колеса для ходового колеса через установленный период времени после обнаружения операции руления. Достигается улучшение поведения транспортного средства при повороте вокруг вертикальной оси и/или наклоне относительно продольной оси во время операции руления. При этом не создаются изменения в жесткости подвески и не изменяется эффективность демпфирования амортизатора. 5 з.п. ф-лы, 8 ил.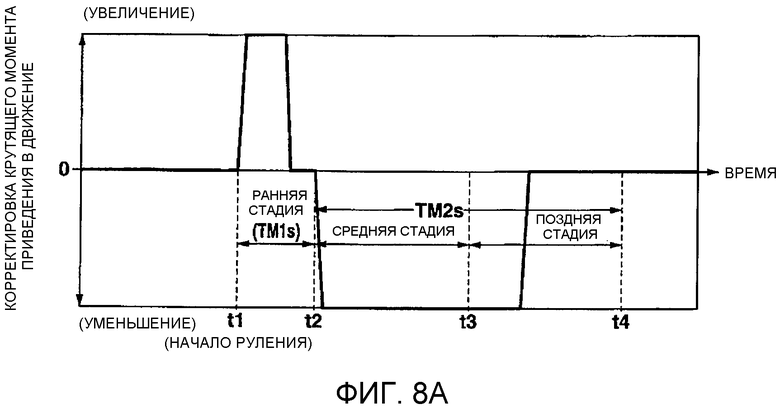
1. Аппарат улучшения поведения транспортного средства при рулении для транспортного средства, при этом транспортное средство способно двигаться с помощью ходового колеса, приводимого в движение движущей силой от источника энергии, при этом аппарат улучшения поведения транспортного средства при рулении содержит:
средство обнаружения операции руления, которое обнаруживает операцию руления относительно руления управляемым колесом транспортного средства; и
средство уменьшения движущей силы, которое временно уменьшает движущую силу для ходового колеса через установленный период времени, после того как операция руления обнаружена средством обнаружения операции руления.
2. Аппарат улучшения поведения транспортного средства при рулении по п.1, в котором средство обнаружения операции руления обнаруживает операцию руления на основе разницы в скорости вращения между множеством ходовых колес транспортного средства.
3. Аппарат улучшения поведения транспортного средства при рулении по п.1 или 2, в котором средство уменьшения движущей силы удерживает движущую силу равной значению движущей силы, полученному посредством уменьшения, в течение предварительно определенного периода времени, после того как установленный период времени истек после обнаружения операции руления.
4. Аппарат улучшения поведения транспортного средства при рулении по п.1 или 2, в котором установленный период времени является периодом времени, для которого требуется реакция руления.
5. Аппарат улучшения поведения транспортного средства при рулении по п.1 или 2, в котором уменьшение движущей силы является таким, что пассажиру транспортного средства не удается ощутить торможение.
6. Аппарат улучшения поведения транспортного средства при рулении по п.1 или 2, в котором:
транспортное средство является электрическим транспортным средством, в котором, по меньшей мере, часть движущей силы обеспечивается электромотором; и
средство уменьшения движущей силы управляет уменьшением движущей силы посредством электромотора.
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОВОРОТОМ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2384438C2 |

