ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к устройству для улучшения ощущения рулевого управления транспортного средства, которое способно к движению с ходовым колесом, приводимым в движение движущей силой от источника энергии, при этом улучшение реализуется за счет управления движущей силой ходового колеса.
УРОВЕНЬ ТЕХНИКИ
Вообще, ощущение рулевого управления транспортного средства обсуждается с точки зрения того, насколько усилие рулевого управления соотносится с входным сигналом рулевого управления (угла руления), установленным водителем. Если усилие рулевого управления слишком мало, входной сигнал рулевого управления (угол руления) имеет склонность становиться чересчур большим, так что поведение транспортного средства становится большим, нежели ожидается водителем. Это не позволяет водителю испытывать ощущение единства с транспортным средством и ощущение безопасности, и вынуждает водителя часто выполнять операцию корректирующего руления. С другой стороны, если усилие рулевого управления слишком велико, операция вождения требует большого усилия в течение длительного периода времени, особенно для вождения на длинные расстояния, и, тем самым, заставляет водителя испытывать ощущение усталости.
Соответственно, усилию рулевого управления необходимо быть подходящим по амплитуде относительно входного сигнала рулевого управления (угла руления). Если усилие рулевого управления является подходящим по амплитуде, водитель может испытывать ощущение единства с транспортным средством и ощущение безопасности, и, тем самым, выполнять операцию плавного руления с улучшенным ощущением рулевого управления. Это делает необязательным выполнять операцию корректирующего руления и предохраняет водителя от испытания ощущения усталости, обусловленной тяжелой операцией руления.
Для того чтобы улучшать ощущение рулевого управления, обычно используют способ, который описан ниже. А именно, в случае, когда система рулевого управления является системой управления с гидроусилителем, клапан, открывание которого изменяется в ответ на относительный поворот согласно нагрузке рулевого управления, сконструирован так, чтобы иметь характеристику изменения открывания из условия, чтобы ощущение рулевого управления устанавливалось, как намечено для каждого транспортного средства. В случае, когда система рулевого управления является системой рулевого управления с электроусилителем, электродвигатель, который помогает энергией усилию рулевого управления, управляется, чтобы иметь характеристику вспомогательного крутящего момента из условия, чтобы ощущение рулевого управления устанавливалось, как намечено для каждого транспортного средства.
Однако в случае системы рулевого управления с гидроусилителем, необходимо изменять технические условия компонентов, чтобы установить характеристику открывания клапана, как намечено. В случае системы рулевого управления с электроусилителем, необходимо изменить технические условия вспомогательного электродвигателя, чтобы установить характеристику крутящего момента вспомогательного электродвигателя, как намечено. Каждый случай имеет проблему высокой себестоимости.
Другая ответная мера для улучшения ощущения рулевого управления, например, была предложена и раскрыта в Патентном Документе 1. Эта предложенная технология состоит в том, чтобы выявлять поперечное ускорение транспортного средства и рассчитывать вспомогательный крутящий момент системы рулевого управления с усилителем для получения оптимального усилия рулевого управления относительно поперечного ускорения, и помогать усилию рулевого управления водителя вспомогательным крутящим моментом, и, тем самым, устанавливать усилие рулевого управления, ощущаемое водителем, в оптимальное относительно поперечного ускорения.
Однако предложенная технология, описанная в Патентном Документе 1, требует средства для выявления поперечного ускорения транспортного средства и, тем самым, имеет подобную проблему высокой себестоимости, как и обычные ответные меры, описанные выше для случаев системы рулевого управления с гидроусилителем и системы рулевого управления с электроусилителем. Соответственно, требуется устройство, которое способно к улучшению ощущения рулевого управления без изменения технических условий компонентов системы рулевого управления с усилителем и без дополнительного средства для выявления поперечного ускорения.
ПАТЕНТНЫЙ ДОКУМЕНТ
Патентный Документ 1: JP 2005-343302 A.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение основано на осознании того обстоятельства, что, если движущая сила ходового колеса подвергается колебаниям в течение операции руления, увеличение движущей силы вызывает увеличение усилия рулевого управления, а затем уменьшение от увеличенной движущей силы вызывает уменьшение усилия рулевого управления от увеличенного значения, с точки зрения, по которой, с периодическим вводом большей силы и меньшей силы, человеческая рука имеет стойкое ощущение, что ощущает большую силу в целом более чувствительно, как раскрыто в документе «Не имеющий зоны нечувствительности силовой интерфейс, использующий нелинейность человеческого восприятия», выпущенном NTT. Эта концепция была воплощена, чтобы предложить устройство улучшения ощущения рулевого управления транспортного средства, сконфигурированное для улучшения ощущения рулевого управления посредством установки подходящего по амплитуде усилия рулевого управления, ощущаемого руками водителя во время операции руления, недорогим способом, не вызывая предпосылки для увеличения себестоимости, как описано выше, посредством неоднократного колебания движущей силы ходового колеса в течение операции руления и, тем самым, колебания усилия рулевого управления.
Согласно настоящему изобретению, устройство улучшения ощущения рулевого управления транспортного средства, выполненного с возможностью движения с ходовым колесом, приводимым в движение движущей силой из источника энергии, содержит: средство выявления операции руления, которое выявляет состояние, когда операция руления выполняется для рулевого управления управляемым колесом транспортного средства; и средство колебания движущей силы, которое неоднократно колеблет движущую силу у ходового колеса, в то время как средство выявления операции руления выявляет состояние, при котором выполняется операция руления.
Устройство улучшения ощущения рулевого управления транспортного средства согласно настоящему изобретению может неоднократно колебать движущую силу у ходового колеса в течение операции руления и, тем самым, колебать усилие рулевого управления в том же цикле, что и колебание движущей силы.
Поскольку водитель чувствительнее ощущает большее усилие рулевого управления в неоднократно колеблющемся усилии рулевого управления, когда усилие рулевого управления является неоднократно колеблющимся, можно устанавливать подходящее по амплитуде усилие рулевого управления, ощущаемое водителем в течение операции руления, недорогим способом, не вызывая увеличения себестоимости, как в традиционных случаях, всего лишь посредством установки цикла колебания движущей силы, и тем самым, улучшать ощущение рулевого управления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
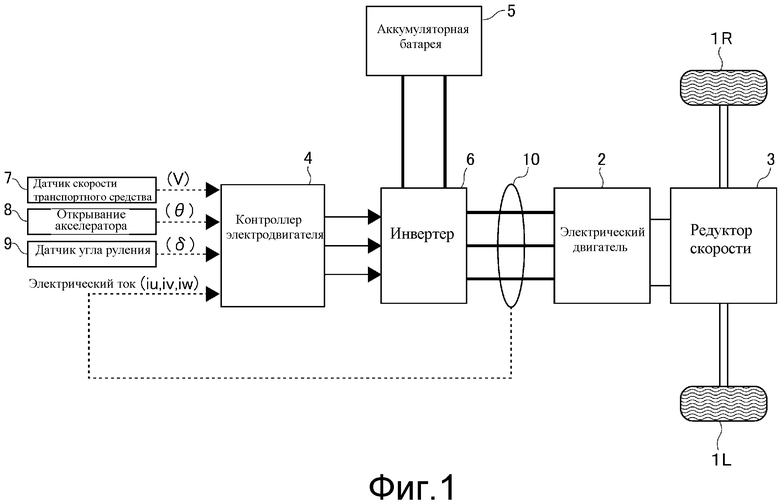
Фиг. 1 - принципиальная схема системы, показывающая систему привода транспортного средства и систему управления для системы привода, в которой транспортное средство оборудовано устройством улучшения ощущения рулевого управления согласно варианту осуществления настоящего изобретения;
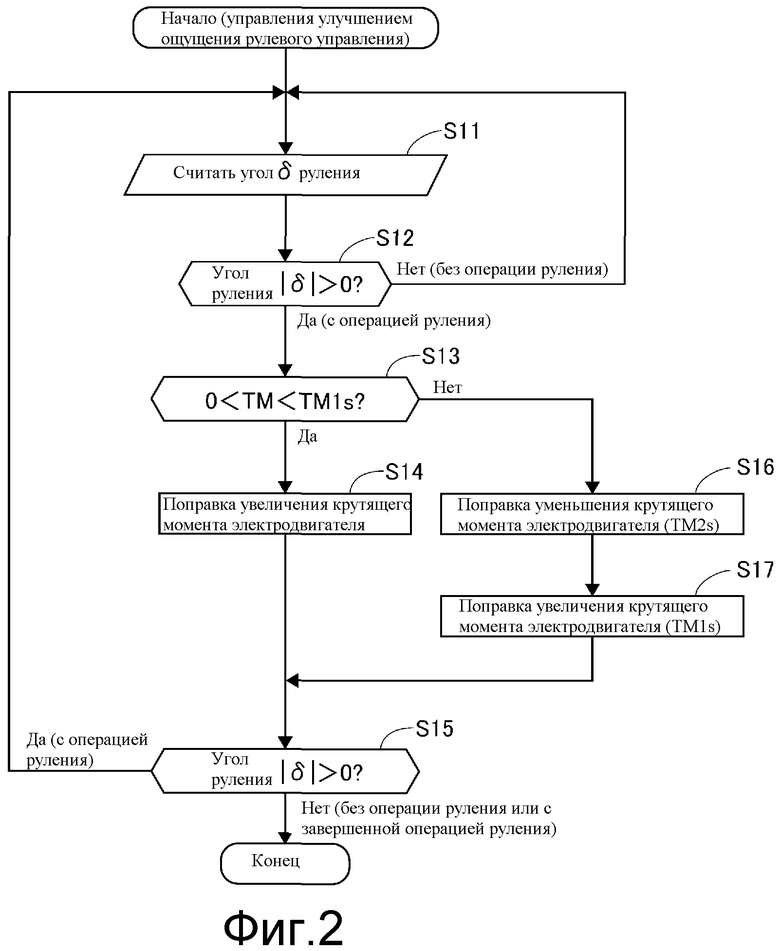
Фиг. 2 - блок-схема последовательности операций способа, показывающая программу управления улучшением ощущения рулевого управления, выполняемую контроллером электродвигателя на фиг. 1;
Фиг. 3 - временная диаграмма операции управления улучшением ощущения рулевого управления согласно фиг. 2;
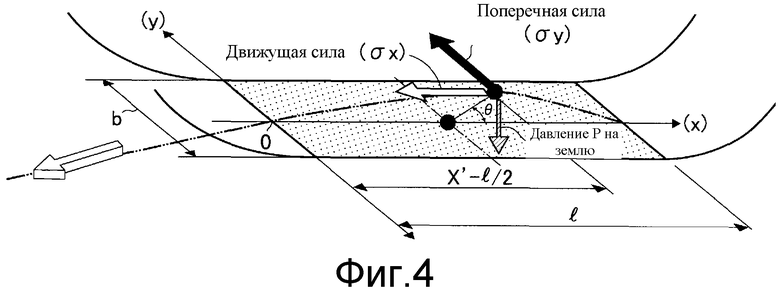
Фиг. 4 - пояснительная схема, показывающая технические характеристики управляемого колеса касательно контактной поверхности;
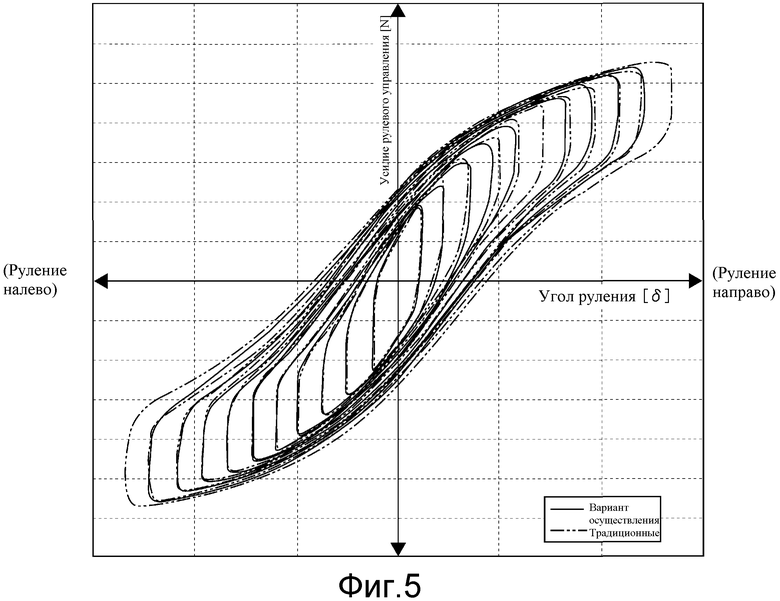
Фиг. 5 - эпюра характеристики изменения усилия рулевого управления, показывающая характеристики изменения усилия рулевого управления относительно угла руления для случая, когда выполняется программа управления с фиг. 2, и для случая, когда программа управления с фиг. 2 не выполняется, в сравнении друг с другом;
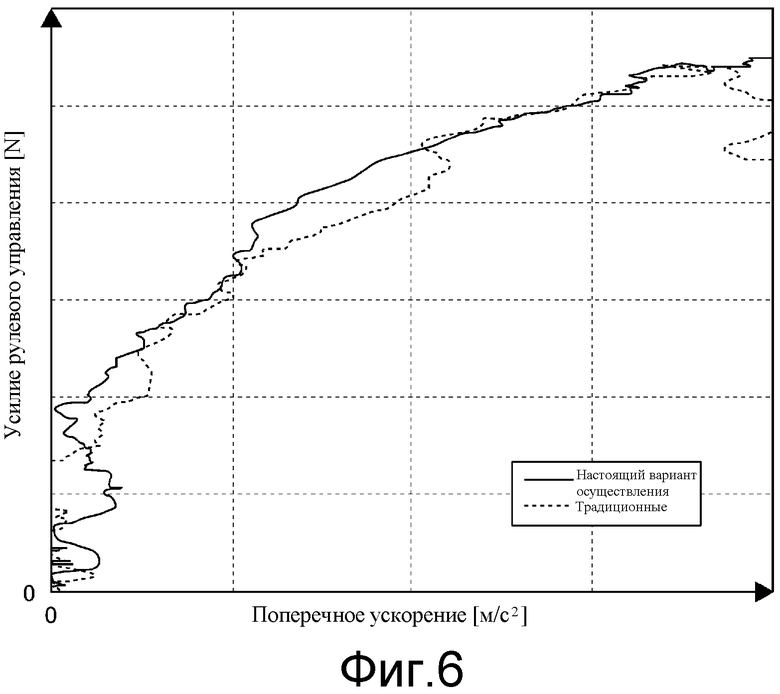
Фиг. 6 - временная диаграмма изменения усилия рулевого управления, показывающая характеристики изменения усилия рулевого управления относительно поперечного ускорения, какие характеристики получены посредством реального движения в пределах испытательного маршрута, имитирующего загородную дорогу, для случая, когда выполняется программа управления с фиг. 2, и для случая, когда программа с фиг. 2 не выполняется, в сравнении друг с другом; и
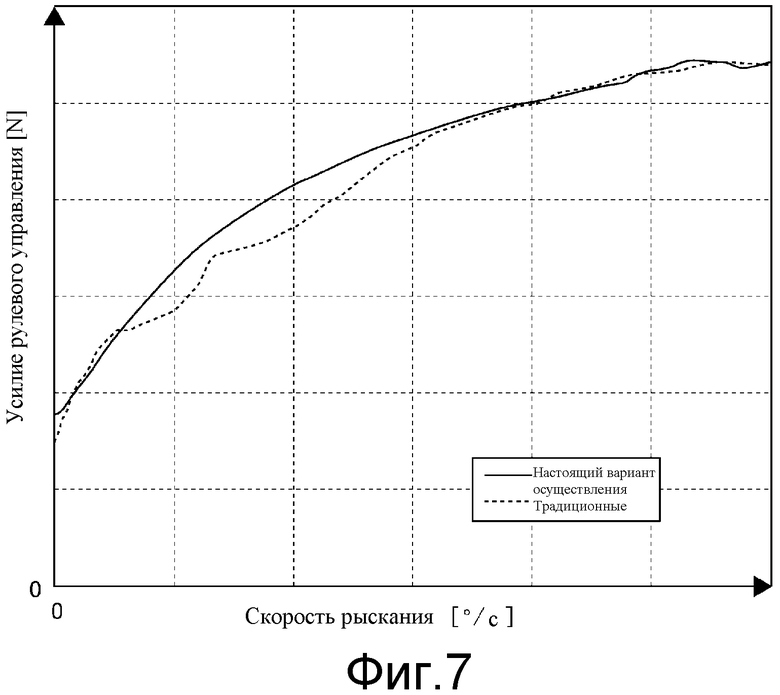
Фиг. 7 - временная диаграмма изменения усилия рулевого управления, показывающая характеристики изменения усилия рулевого управления относительно скорости рыскания, какие характеристики получены посредством реального движения в пределах испытательного маршрута, имитирующего загородную дорогу, для случая, когда выполняется программа управления с фиг. 2, и для случая, когда программа с фиг. 2 не выполняется, в сравнении друг с другом.
СПОСОБ(Ы) ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Последующее описывает варианты для осуществления настоящего изобретения со ссылкой на вариант осуществления, показанный на чертежах.
Конфигурация
Фиг. 1 показывает систему привода транспортного средства и систему управления для системы привода, в которой транспортное средство оборудовано устройством улучшения ощущения рулевого управления согласно варианту осуществления настоящего изобретения. В варианте осуществления, транспортное средство с фиг. 1 является транспортным средством с электрическим приводом, которое способно к движению с приводимыми в движение левым и правым передними колесами 1L, 1R, при этом левое и правое передние колеса 1L, 1R являются управляемыми колесами. Приведение в движение левого и правого передних колес 1L, 1R реализовано посредством приведения в движение левого и правого передних колес 1L, 1R электрическим двигателем 2 в качестве источника энергии через редуктор 3 скорости, при этом редуктор 3 скорости включает в себя дифференциальную передачу.
Движущая сила электрического двигателя 2 регулируется контроллером 4 электродвигателя, который выполняет преобразование постоянного тока в переменный ток (DC-AC) из энергии аккумуляторной батареи 5 в качестве источника питания посредством инвертера 6 и подает питание переменного тока AC на электрический двигатель 2 под управлением инвертера 6, с тем чтобы приводить крутящий момент электрического двигателя 2 в соответствие целевому крутящему моменту электродвигателя в результате расчета, полученного контроллером 4 электродвигателя.
Если целевой крутящий момент электродвигателя в результате расчета, полученного контроллером 4 электродвигателя, имеет отрицательную полярность, которая запрашивает операции рекуперативного торможения электрического двигателя 2, то контроллер 4 электродвигателя прикладывает нагрузку генерации к электрическому двигателю 2 через инвертер 6 и выполняет преобразование переменного тока в постоянный ток (AC-DC) из энергии, выработанной операцией рекуперативного торможения электрического двигателя 2, и заряжает аккумуляторную батарею 5.
Контроллер 4 электродвигателя принимает ввод информации, используемой для расчета целевого крутящего момента электродвигателя (целевой движущей силы), описанного выше. Информация включает в себя сигнал с датчика 7 скорости транспортного средства, который определяет скорость V транспортного средства, которая является скоростью транспортного средства с электрическим приводом относительно земли, и сигнал с датчика 8 открывания акселератора, который определяет открывание θ акселератора (запрошенную нагрузку электрического двигателя), произведенное операцией вождения, и сигнал с датчика 9 угла руления, который определяет угол δ руления по рулевому колесу (не показано), которое управляется водителем для рулевого управления левым и правым передними колесами 1L, 1R, и сигнал с датчика 10 электрического тока, который выявляет электрические токи электрического двигателя 2 (электрические токи iu, iv, iw на фиг. 1 для создания трехфазных переменных токов фазы U, фазы V и фазы W).
Контроллер 4 электродвигателя вырабатывает сигнал ШИМ (широтно-импульсной модуляции) для управления электрическим двигателем 2 на основании вышеприведенной информации и вырабатывает управляющий сигнал на привод для инвертера 6 через схему управления приводом на основании сигнала ШИМ. Например, инвертер 6 состоит из двух переключающих элементов (например, мощных полупроводниковых элементов, таких как IGBT (биполярные транзисторы с изолированным затвором)) для каждой фазы, и подает требуемый ток на электрический двигатель 2 наряду с включением/отключением (ON/OFF) переключающих элементов согласно управляющему сигналу на привод и выполнением преобразования из постоянного тока, подаваемого с аккумуляторной батареи 5, в переменный ток и обратного преобразования.
Электрический двигатель 2 вырабатывает движущую силу на основании переменного тока из инвертера 6 и передает движущую силу на левое и правое передние колеса 1L, 1R (левое и правое управляемые колеса) через редуктор 3 скорости. В то время как транспортное средство является движущимся так, что электрический двигатель 2 увлекается левым и правым передними колесами 1L, 1R, то есть электрический двигатель 2 находится в так называемом состоянии инверсного привода, к электрическому двигателю 2 прикладывается нагрузка генерации для выполнения операции рекуперативного торможения и регенерации кинетической энергии транспортного средства, и зарядки аккумуляторной батареи 5.
Управление улучшением ощущения рулевого управления транспортного средства
Контроллер 4 электродвигателя выполняет программу управления, показанную на фиг. 2, и выполняет управление улучшением ощущения рулевого управления транспортного средства посредством управления движущей силой для электрического двигателя 2, как изложено ниже.
На этапе S11, контроллер 4 электродвигателя считывает угол δ руления. На этапе S12, контроллер 4 электродвигателя проверяет, удовлетворяет или нет абсолютное значение |δ| угла δ руления соотношению |δ|>0 (в действительности, установленного значения для проверки рулевого управления, принимая во внимание зону нечувствительности, вместо «0»), и, тем самым, определяет, находится ли он в управляемом рулем состояния, в котором левое и правое передние колеса 1L, 1R подвергаются рулевому управлению, или в неуправляемом рулем состоянии, в котором левое и правое передние колеса 1L, 1R не подвергаются рулевому управлению. Соответственно, этапы S11 и S12 соответствуют средству выявления операции руления в настоящем изобретении.
Вместо вышеизложенного, определение, выполняется или нет операция руления, может быть реализовано проверкой, на основании частоты вращения ходового колеса каждого ходового колеса, находятся или нет выше порогового значения для проверки рулевого управления перепад частоты вращения ходовых колес между левым и правым передними колесами 1L, 1R, или перепад частоты вращения ходовых колес между левым и правым задними колесами (не показано), или перепад частоты вращения ходовых колес между передними и задними колесами, не показанными, а именно перепад между средней частотой вращения ходовых колес левого и правого передних колес 1L, 1R и средней частотой вращения ходовых колес левого и правого задних колес (не показано).
В то время как на этапе S12 определяется, что операция руления не выполняется, необязательно выполнять управление улучшением ощущения рулевого управления транспортного средства, так что контроллер 4 электродвигателя возвращает управление на этап S11 и ожидает наряду с повторным выполнением определения начала рулевого управления на этапе S12 до тех пор, пока не выполняется операция руления. В момент времени, когда определено, на этапе S12, что выполняется операция руления, должно начинаться управление улучшением ощущения рулевого управления транспортного средства. Соответственно, контроллер 4 электродвигателя побуждает управление перейти на этап S13 и к следующим этапам, где контроллер 4 электродвигателя выполняет управление улучшением ощущения рулевого управления транспортного средства посредством управления движущей силой электрического двигателя 2, как изложено ниже.
На этапе S13, контроллер 4 электродвигателя проверяет, находится он или нет до того, как таймер TM указывает установленный период TM1s времени (0<TM<TM1s), при этом таймер TM измеряет период времени, истекший после начала операции руления. В то время как (0<TM<TM1s) определено на этапе S13, а именно в то время как определено, что он находится в пределах установленного периода TM1s времени от момента t1 времени на фиг. 3, когда начата операция руления, контроллер 4 электродвигателя выполняет, на этапе S14, поправку увеличения крутящего момента электродвигателя по внесению поправки в целевой крутящий момент электродвигателя у электрического двигателя 2 посредством добавления поправки ΔTm крутящего момента на ведущем валу на время непосредственно после момента t1 времени, когда начата операция руления, как указано формой сигнала крутящего момента на фиг. 3, при этом целевой крутящий момент электродвигателя определяется на основании скорости V транспортного средства и открывания APO акселератора посредством использования готовой многомерной регулировочной характеристики крутящего момента электродвигателя.
В настоящем описании изобретения, «целевой крутящий момент электродвигателя» используется для указания ссылкой не только на крутящий момент по запросу водителя, определенный на основании скорости V транспортного средства и открывания APO акселератора, как описано выше, но также скорректированный целевой крутящий момент электродвигателя после внесения поправки в ответ на запрос управления движущей силой, если запрос управления движущей силой представлен предпосылками (контролем поведения транспортного средства и регулированием тягового усилия), иными, чем запрос водителя. А именно, «целевой крутящий момент электродвигателя» может использоваться для любой разновидности крутящего момента электродвигателя, который определяется на основании состояния эксплуатации транспортного средства.
На этапе S15, контроллер 4 электродвигателя проверяет, удовлетворяет или нет абсолютное значение угла руления, |δ|, соотношению |δ|>0, и тем самым определяет, продолжается ли операция руления после момента t1 времени, когда на этапе S12 определено, что начата операция руления. Соответственно, этап S15 составляет средство выявления операции руления в настоящем изобретении, также как этапы S11 и S12.
В то время как на этапе S15 определено, что выполняется операция руления, контроллер 4 электродвигателя возвращает управление на этап S11 и этап S12, а затем побуждает управление перейти с этапа S12 на S13, так как выполняется операция руления. В то время как (0<TM<TM1s) определено на этапе S13, а именно в то время как определено, что это происходит до момента t2 времени, когда истекает установленный период TM1s времени от момента t1 времени на фиг. 3, когда начата операция руления, контроллер 4 электродвигателя продолжает поправку увеличения крутящего момента электродвигателя по этапу S14, как указано формой сигнала крутящего момента на фиг. 3.
Когда на этапе S13 определено, что (0<TM<TM1s) становится неудовлетворенным, а именно после момента t2 времени, когда истек установленный период TM1s времени от момента t1 времени по фиг. 3, когда начата операция руления, контроллер 4 электродвигателя побуждает управление перейти на этап S16 и этап S17, где контроллер 4 электродвигателя завершает поправку увеличения крутящего момента электродвигателя по этапу S14, а затем переключается на следующее управление поправкой крутящего момента электродвигателя.
На этапе S16, контроллер 4 электродвигателя выполняет поправку уменьшения крутящего момента электродвигателя по поправке целевого крутящего момента электродвигателя у электрического двигателя 2, описанной выше, посредством уменьшения поправки (-ΔTm) крутящего момента на ведущем валу на время непосредственно после момента t2 времени по фиг. 3. Эта поправка уменьшения крутящего момента электродвигателя выполняется в течение периода между моментом t2 времени по фиг. 3 и моментом t3 времени, когда истек установленный период времени TM2s, после момента t2 времени. Поправка (-ΔTm) уменьшения крутящего момента на ведущем валу устанавливается равной поправке ΔTm увеличения крутящего момента на ведущем валу, описанной выше, по абсолютному значению. С другой стороны, период TM2s времени уменьшения крутящего момента электродвигателя устанавливается более коротким, чем период TM1s времени увеличения крутящего момента электродвигателя, описанный выше.
На этапе S17, который выполняется, когда завершается поправка уменьшения крутящего момента электродвигателя по этапу S16 (в момент t3 времени на фиг. 3), контроллер 4 электродвигателя выполняет поправку увеличения крутящего момента электродвигателя по внесению поправки в целевой крутящий момент электродвигателя у электрического двигателя 2, описанный выше, посредством увеличения поправки ΔTm крутящего момента на ведущем валу на время непосредственно после момента t3 времени по фиг. 3. Эта поправка увеличения крутящего момента электродвигателя выполняется в течение периода между моментом t3 времени по фиг. 3 и моментом t4 времени, когда истек такой же установленный период времени TM1s, как на этапе S14.
После этапа S17, на котором выполняется поправка увеличения крутящего момента электродвигателя, контроллер 4 электродвигателя проверяет, на этапе S15, удовлетворяет или нет абсолютное значение угла руления, |δ|, соотношению |δ|>0, и тем самым, определяет, продолжается ли операция руления после момента t4 времени на фиг. 3, когда завершается поправка увеличения крутящего момента электродвигателя. В то время как на этапе S15 определено, что выполняется операция руления, контроллер 4 электродвигателя возвращает управление на этап S11 и этап S12, а затем побуждает управление перейти с этапа S12 на S13, так как выполняется операция руления. Когда текущий TM≥TM1s определен на этапе S13, контроллер 4 электродвигателя побуждает управление перейти на этап S16 и этап S17.
Соответственно, если операция руления продолжается после момента t4 времени на фиг. 3, поправка (-ΔTm, ΔTm) крутящего момента на ведущем валу, указанная после момента t4 времени, используется для неоднократного выполнения поправки уменьшения (этап S16) и поправки увеличения (этап S17) в отношении целевого крутящего момента электродвигателя электрического двигателя 2. Когда водитель возвращает рулевое колесо обратно в нейтральное положение и завершает операцию руления, контроллер 4 электродвигателя определяет, на этапе S15, что операция руления завершена, на основании абсолютного значения угла руления, |δ|=0, а затем возвращается из цикла по фиг. 2, так что контроллер 4 электродвигателя прекращает выполнение поправки уменьшения (этап S16) и поправки увеличения (этап S17), и управляет электрическим двигателем 2, чтобы выдавал целевой крутящий момент электродвигателя.
Посредством управления улучшением ощущения рулевого управления по фиг. 2, крутящий момент электрического двигателя 2 неоднократно колеблется, как указано формой сигнала колебания крутящего момента на фиг. 3, относительно целевого крутящего момента электродвигателя после момента t1 времени на фиг. 3, когда начата операция руления. Прежде всего, крутящий момент электрического двигателя 2 регулируется значением, которое увеличено на величину ΔTm, указанную формой сигнала колебания крутящего момента на фиг. 3, относительно целевого крутящего момента электродвигателя на этапе S14 в течение периода от момента t1 времени, когда начата операция руления, до момента t2 времени, когда истек период TM1s времени.
Затем, в течение периода от момента t2 времени, когда завершается поправка увеличения крутящего момента электродвигателя, до момента t3 времени, когда истек установленный период TM2s времени, крутящий момент электрического двигателя 2 регулируется значением, которое уменьшено на величину (-ΔTm), указанную формой сигнала колебания крутящего момента на фиг. 3, относительно целевого крутящего момента электродвигателя на этапе S16. После этого, в течение периода от момента t3 времени, когда завершается поправка уменьшения крутящего момента электродвигателя, до момента t4 времени, когда истек установленный период TM1s времени, крутящий момент электрического двигателя 2 регулируется значением, которое увеличено на величину (ΔTm), указанную формой сигнала колебания крутящего момента на фиг. 3, относительно целевого крутящего момента электродвигателя на этапе S17.
После этого, крутящий момент электрического двигателя 2 управляется, как в периоде от момента t2 времени до момента t4 времени, посредством повторного выполнения этапа S16 и этапа S17 для повторения профиля уменьшения и увеличения. Соответственно, этапы S14, S16 и S17 соответствуют средству колебания движущей силы в настоящем изобретении.
Вышеизложенное управление колебательной поправкой движущей силы служит для улучшения ощущения рулевого управления транспортного средства, как будет описано далее.
Последующее описывает зависимость между усилием рулевого управления и колебанием крутящего момента электродвигателя (движущей силой ходового колеса), когда выполняется операция руления. В случае, когда технические условия около контактной поверхности шины являются, как показанные на фиг. 4, угловой момент M, сформированный отдельным управляемым колесом (передним колесом) 1L, 1R, может определяться посредством использования следующего уравнения вычитанием второго члена правой стороны уравнения из первого члена правой стороны уравнения, при этом первый член является угловым моментом, являющимся следствием поперечной силы σy, а второй член является угловым моментом, являющимся следствием движущей силы σx.
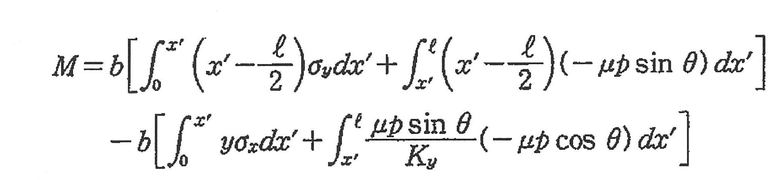
(Уравнение 1)
Когда крутящий момент электродвигателя увеличивается, как в периоде t1-t2 и периоде t3-t4, продольная сила в переднем направлении транспортного средства, а именно движущая сила σx, как показано на фиг. 4, вырабатывается на контактной поверхности шины переднего колеса 1L, 1R, которое подвергается рулевому управлению. С другой стороны, в то время как выполняется операция руления, смещение нагрузки по направлению наружу от движения на повороте, вызывает момент точки контакта шины движущегося на повороте наружу переднего колеса, направленный наружу в поперечном направлении транспортного средства, а также вызывает момент точки контакта шины движущегося на повороте внутрь переднего колеса, направленный внутрь в поперечном направлении транспортного средства, при этом наружная и внутренняя точки контакта подвергаются движущим силам σx соответственно.
Движущая сила σx имеет следствием момент для поворачивания подвергнутого рулевому управлению переднего колеса 1L, 1R вокруг оси поворотного шкворня, тогда как движущая сила σx при условии, где увеличивается крутящий момент электродвигателя, выдает на переднее колесо 1L, 1R возвращающий момент для поворачивания подвергнутого рулевому управлению переднего колеса 1L, 1R обратно в нейтральное положение. В этой связи, возвращающий момент является моментом в направлении для сопротивления действию рулевого колеса, выполняемому водителем. Соответственно, это служит в качестве возвращающего тягового усилия для увеличения усилия рулевого управления, как показано в примере согласно фиг. 3, показывающей колебание тягового усилия рулевой рейки в течение периода t3-t4, когда увеличивается крутящий момент электродвигателя.
С другой стороны, когда крутящий момент электродвигателя уменьшается, как в периоде t2-t3 и непосредственно после t4, продольная сила в заднем направлении транспортного средства, а именно движущая сила σx в направлении, противоположном направлению на фиг. 4, вырабатывается на контактной поверхности шины переднего колеса 1L, 1R, которое подвергается рулевому управлению. Эта движущая сила σx действует в точке контакта шины движущегося на повороте наружу переднего колеса и точке контакта движущегося на повороте внутрь рулевого колеса, которые движутся, как описано выше, и имеет следствием момент для поворачивания подвергнутых рулевому управлению передних колес 1L, 1R вокруг оси поворотного шкворня.
Поскольку движущая сила σx, когда крутящий момент электродвигателя уменьшается, находится в направлении, противоположном направлению, когда крутящий момент электродвигателя увеличивается, она прикладывает к переднему колесу 1L, 1R момент в направлении движения на повороте, чтобы дополнительно осуществлять рулевое управление подвергнутым рулевому управлению передним колесом 1L, 1R. Этот момент в направлении движения на повороте является направлением для приведения в соответствие действию рулевого колеса, произведенному водителем, и служит в качестве тягового усилия в направлении движения на повороте и уменьшает усилие рулевого управления, как показано в примере по фиг. 3, показывающем колебание тягового усилия рулевой рейки в течение периода t2-t3, когда уменьшается крутящий момент электродвигателя.
Поправкам (ΔTm, -ΔTm) увеличения и уменьшения крутящего момента на ведущем валу требуется быть достаточно большими, чтобы предоставлять водителю возможность ощущать изменение усилия рулевого управления, сформированного, как описано выше. Однако, если поправки (ΔTm, -ΔTm) увеличения и уменьшения крутящего момента на ведущем валу таковы, что водитель ощущает ускорение и замедление, это некомфортно водителю. Соответственно, поправки (ΔTm, -ΔTm) увеличения и уменьшения крутящего момента на ведущем валу установлены с тем, чтобы предохранять водителя от ощущения ускорения и замедления.
Соответственно, даже если выполняется колебательная поправка крутящего момента электродвигателя в управляемом рулем состоянии согласно настоящему варианту осуществления, характеристики усилия рулевого управления относительно угла δ руления фактически измеряются, как указано сплошными линиями, которые не очень сильно отличаются от таковых для случая, когда колебательная поправка крутящего момента электродвигателя в управляемом рулем состоянии не выполняется, которые указаны линиями с длинными пунктирами и двойными короткими пунктирами. Однако, если усилие рулевого управления подвергается неоднократному колебанию колебательной поправкой крутящего момента электродвигателя в управляемом рулем состоянии, как описано со ссылкой на фиг. 3, водитель имеет склонность ощущать руками, управляющими рулевым колесом, большее (увеличенное) усилие рулевого управления чувствительнее, чем меньшее (уменьшенное) усилие рулевого управления, и, тем самым, ощущает большее (увеличенное) усилие рулевого управления в целом значительнее.
Соответственно, признак выполнения колебательной поправки крутящего момента электродвигателя в управляемом рулем состоянии, чтобы вызывать неоднократное колебание усилия рулевого управления, как описано со ссылкой на фиг. 3, служит для установления подходящего по амплитуде усилия рулевого управления, ощущаемого водителем руками, только установкой периодов TM1s, TM2s времени увеличения и уменьшения крутящего момента электродвигателя, и, тем самым, улучшает ощущение рулевого управления, так что водитель может испытывать ощущение единства с транспортным средством и ощущение безопасности.
Более того, как описано выше, признак установки периода TM1s времени увеличения крутящего момента электродвигателя и периода TM2s времени уменьшения крутящего момента электродвигателя в соотношении по амплитуде TM1s>TM2s служит для улучшения ощущения рулевого управления еще более надежно. Предпочтительно устанавливать период TM1s времени увеличения крутящего момента электродвигателя и период TM2s времени уменьшения крутящего момента электродвигателя в соотношении в пределах отношения из условия, чтобы отношение между ними (TM1s/TM2s) удерживалось постоянным независимо от скорости рулевого управления и, тем самым, получать улучшение ощущения рулевого управления, описанное выше, на любой скорости рулевого управления.
Фиг. 6 показывает характеристики изменения усилия рулевого управления относительно поперечного ускорения, которые получены посредством реального движения в пределах испытательного маршрута, имитирующего загородную дорогу. Фиг. 7 показывает характеристики изменения усилия рулевого управления относительно скорости рыскания, которые получены посредством реального движения в пределах испытательного маршрута. Сплошные линии на фиг. 6 и 7 указывают характеристики изменения усилия рулевого управления для случая, когда колебательная поправка крутящего момента электродвигателя в управляемом рулем состоянии согласно настоящему изобретению выполняется для неоднократного колебания усилия рулевого управления, как описано выше со ссылкой на фиг. 3. Прерывистые линии на фиг. 6 и 7 указывают характеристики изменения усилия рулевого управления для случая, когда колебательная поправка крутящего момента электродвигателя в управляемом рулем состоянии согласно настоящему изобретению не выполняется (а именно не вырабатывается никакого неоднократного колебания усилия рулевого управления).
В случае, когда колебательная поправка крутящего момента электродвигателя в управляемом рулем состоянии согласно настоящему варианту осуществления не выполняется (а именно, не вырабатывается никакого неоднократного колебания усилия рулевого управления), водителю не удается выполнять операцию плавного руления и приходится часто выполнять операцию корректирующего руления, как ясно по прерывистым линиям на фиг. 6 и 7, поскольку ощущение рулевого управления не является предоставляющим водителю возможность испытывать ощущение единства с транспортным средством и чувствовать себя в безопасности. В противоположность этому, в случае, когда колебательная поправка крутящего момента электродвигателя в управляемом рулем состоянии согласно настоящему варианту осуществления выполняется для неоднократного колебания усилия рулевого управления, можно устанавливать подходящее по амплитуде усилие рулевого управления, ощущаемое водителем руками в течение операции руления, с помощью установки периодов TM1s, TM2s времени увеличения и уменьшения крутящего момента электродвигателя в управляемом рулем состоянии на фиг. 3, и тем самым, улучшать ощущение рулевого управления для предоставления водителю возможности испытывать ощущение единства с транспортным средством и ощущение безопасности. Это предоставляет водителю возможность выполнять операцию плавного руления почти без операции корректирующего руления, как ясно по сплошным линиям на фиг. 6 и 7.
Более того, согласно настоящему варианту осуществления, можно получать полезные результаты, описанные выше, всего лишь установкой периодов TM1s, TM2s времени увеличения и уменьшения крутящего момента электродвигателя в управляемом рулем состоянии, и тем самым, добиваться улучшения ощущения рулевого управления, описанного выше, с низкими затратами без традиционной необходимости изменения технических условий компонентов системы рулевого управления с усилителем и без традиционной необходимости дополнительных средств, таких как средство выявления поперечного ускорения.
Более того, в настоящем варианте осуществления, признак того, что для колебательной поправки крутящего момента электродвигателя в управляемом рулем состоянии по фиг. 3, поправка крутящего момента, которая должна начинаться в момент t1 времени, когда начинается операция руления, реализуется поправкой увеличения крутящего момента электродвигателя, как в периоде от момента t1 времени до момента t2 времени, дает следующий полезный результат. Если поправка увеличения крутящего момента электродвигателя выполняется для увеличения движущей силы ходового колеса, как на ранней стадии от момента t1 времени до момента t2 времени, как в настоящем варианте осуществления, угловой момент, являющийся следствием перепада между угловым моментом движущегося на повороте наружу колеса и угловым моментом движущегося на повороте внутрь колеса, и углового момента движущегося на повороте внутрь колеса (возвращающего момента) становится большим в течение ранней стадии, так что наблюдаемая поперечная сила, полученная делением перепада момента на расстояние от центра масс до полуоси, увеличивается в течение ранней стадии.
Как результат, скорость рыскания транспортного средства быстро возрастает в течение ранней стадии во время ранней стадии после начала операции руления, и само значение скорости рыскания увеличивается, так что реакция на поворачивание передней части транспортного средства в течение ранней стадии после начала операция руления (или исходная способность поворачивания передней части), а именно, реакция на рулевом колесе, может улучшаться.
Более того, признак реализации определения на этапах S12 и S15, выполняется ли операция руления, опираясь на скорость ходового колеса каждого ходового колеса вместо угла δ руления по рулевому колесу, как описано выше, служит для получения следующих полезных результатов.
Он заключается в том, что колебательная поправка крутящего момента электродвигателя согласно фиг. 2 фактически требуется, когда левое и правое передние колеса 1L, 1R подвергаются рулевому управлению. В этой связи, в случае, когда на основании угла δ руления рулевого колеса определяется, выполняется или нет операция руления, возможно, что колебательная поправка крутящего момента электродвигателя по фиг. 2 начинается, когда левое и правое передние колеса 1L, 1R еще не подвергаются рулевому управлению, так как левое и правое передние колеса 1L, 1R фактически управляются с задержкой от возникновения угла δ руления рулевого колеса, при этом задержка обусловлена задержкой в реакции системы передачи усилия рулевого управления.
Однако, если на основании перепада скорости ходовых колес определяется, выполняется или нет операция руления, определяется, что операция рулевого управления выполняется, когда левое и правое передние колеса 1L, 1R приведены в управляемое рулем состояние. Это устраняет возможность того, что колебательная поправка крутящего момента электродвигателя согласно фиг. 2 начинается, когда левое и правое передние колеса 1L, 1R еще не подвергаются рулевому управлению, и служит для дополнительного обеспечения функций, описанных выше.
Другой вариант(ы) осуществления изобретения
Хотя вышеизложенное описывает пример со ссылкой на чертежи, на которых настоящее изобретение применяется к транспортному средству, в котором приводятся в движение управляемые левое и правое передние колеса 1L, 1R, настоящее изобретение может применяться к транспортному средству, в котором левое и правое задние колеса приводятся в движение электродвигателем вместо или в дополнение к левому и правому передним колесам 1L, 1R, или может применяться к транспортному средству, в котором ходовые колеса приводятся в движение своими соответственными электрическими двигателями. К тому же, в таких случаях ясно, что функции и результаты, описанные выше, могут быть получены управлением колебательной поправкой движущей силы согласно фиг. 2.
В этой связи, источник энергии для приведения в движение ходовых колес не ограничен вращательным электрическим источником энергии, таким как электрический двигатель 2, но может быть двигателем, таким как двигатель внутреннего сгорания. В таких случаях также, функции и результаты, описанные выше, могут быть получены управлением колебательной поправкой движущей силы согласно фиг. 2. Однако двигатели более медленны по реакции на управляющее воздействие, чем вращательные источники энергии, так что полезно, чтобы управление колебательной поправкой движущей силы согласно фиг. 2 применялось к вращательному электрическому источнику энергии, чтобы обеспечить функции и результаты, описанные выше.
В показанном примере, крутящий момент электродвигателя (движущая сила ходового колеса) подвергается неоднократному колебанию посредством добавления поправки крутящего момента электродвигателя ±ΔTm согласно фиг. 3 к целевому крутящему моменту электродвигателя у электрического двигателя 2 в качестве опорного уровня. Это может быть замещено способом колебания крутящего момента электродвигателя (движущей силы ходового колеса), как описано ниже.
Первый способ колебания состоит в том, чтобы неоднократно колебать крутящий момент электродвигателя (движущую силу ходового колеса) неоднократным добавлением поправки крутящего момента электродвигателя +ΔTm согласно фиг. 3 к целевому крутящему моменту электродвигателя у электрического двигателя 2 и прекращением добавления, без поправки уменьшения крутящего момента электродвигателя.
Второй способ колебания состоит в том, чтобы неоднократно колебать крутящий момент электродвигателя (движущую силу ходового колеса) неоднократным добавлением поправки крутящего момента электродвигателя -ΔTm согласно фиг. 3 к целевому крутящему моменту электродвигателя у электрического двигателя 2 и прекращением добавления, без поправки увеличения крутящего момента электродвигателя.
Однако способ неоднократного колебания крутящего момента электродвигателя (движущей силы ходового колеса) добавлением поправки крутящего момента электродвигателя ±ΔTm к целевому крутящему моменту электродвигателя 2, как в показанном примере, является более предпочтительным, так как отклонение от крутящего момента электродвигателя является небольшим.
Более того, когда крутящий момент электродвигателя (движущая сила ходового колеса) подвергается неоднократному колебанию, необязательно начинать сначала одно из увеличения и уменьшения. Однако способ начинания с увеличения крутящего момента электродвигателя (движущей силы ходового колеса) полезен по той причине, что также может быть получен эффект улучшения реакции на рулевом колесе.
Необязательно устанавливать абсолютное значение поправки ΔTm увеличения крутящего момента на ведущем валу идентичным таковому у поправки (-ΔTm) движущего крутящего момента на ведущем валу. Поправка ΔTm увеличения крутящего момента на ведущем валу и поправка (-ΔTm) уменьшения крутящего момента на ведущем валу может произвольно определяться в пределах диапазона, удовлетворяющего требованиям, описанным выше. Однако предпочтительно устанавливать абсолютное значение поправки ΔTm увеличения крутящего момента на ведущем валу идентичным поправке (-ΔTm) уменьшения крутящего момента на ведущем валу или устанавливать абсолютное значение поправки (-ΔTm) уменьшения крутящего момента на ведущем валу меньшим, так как такие установки позволяют легче определять период TM1s времени увеличения крутящего момента электродвигателя и период TM2s времени уменьшения крутящего момента электродвигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УЛУЧШЕНИЯ ПОВЕДЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ПРИ РУЛЕНИИ | 2011 |
|
RU2524525C1 |
| УСТРОЙСТВО ДЛЯ УЛУЧШЕНИЯ ПОВЕДЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ПРИ РУЛЕНИИ | 2011 |
|
RU2526310C2 |
| УСТРОЙСТВО ДЛЯ РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2437793C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ РУЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2533854C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ КОЛЕБАНИЯМИ И СИСТЕМА УПРАВЛЕНИЯ КОЛЕБАНИЯМИ | 2016 |
|
RU2637079C2 |
| СИСТЕМА И СПОСОБ ДЛЯ УПРАВЛЕНИЯ РУЛЕНИЕМ И ТОРМОЖЕНИЕМ | 2018 |
|
RU2692415C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ И СПОСОБ УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2633023C2 |
| УСТРОЙСТВО УСИЛИТЕЛЯ РУЛЕВОГО УПРАВЛЕНИЯ | 2014 |
|
RU2630344C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВЕДЕНИЕМ В ДВИЖЕНИЕ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2557132C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2587317C1 |
Изобретение относится к области регулирования рулевого управления. Устройство улучшения ощущения рулевого управления содержит контроллер электродвигателя, датчик угла руления, аккумуляторную батарею, инвертер, таймер. Осуществляют неоднократное колебание движущей силы у ходового колеса при выявлении операции руления. Достигается улучшение ощущения рулевого управления. 8 з.п. ф-лы, 7 ил.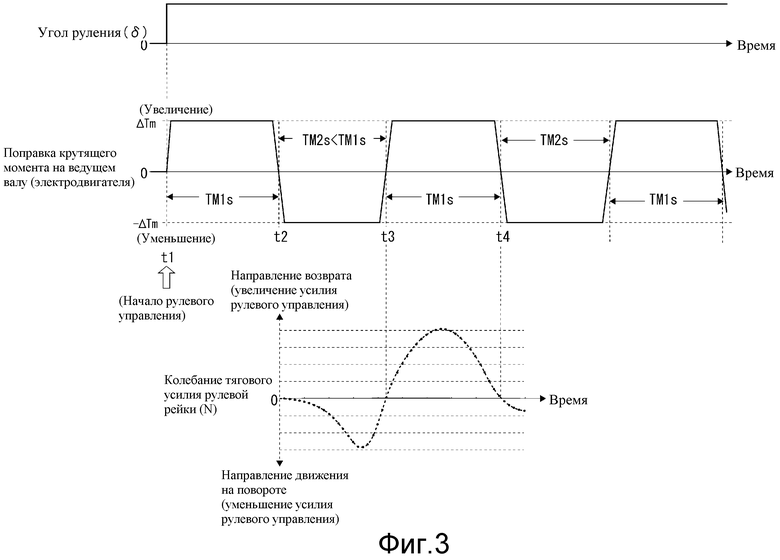
1. Устройство улучшения ощущения рулевого управления транспортного средства, при этом транспортное средство выполнено с возможностью движения с ходовым колесом, приводимым в движение движущей силой от источника энергии, причем устройство улучшения ощущения рулевого управления транспортного средства содержит:
средство выявления операции руления, которое выявляет состояние, когда операция руления выполняется для рулевого управления управляемым колесом транспортного средства; и
средство колебания движущей силы, которое неоднократно колеблет движущую силу у ходового колеса, в то время как средство выявления операции руления выявляет состояние, при котором выполняется операция руления.
2. Устройство по п.1, в котором средство выявления операции руления выявляет, что выполняется операция руления, на основании перепада частоты вращения среди множества ходовых колес транспортного средства.
3. Устройство по п.1, в котором средство колебания движущей силы выполняет, по меньшей мере, операцию увеличения движущей силы по увеличению движущей силы у ходового колеса для неоднократного колебания движущей силы у ходового колеса.
4. Устройство по п.3, в котором средство колебания движущей силы выполняет операцию увеличения движущей силы первой при неоднократном колебании движущей силы у ходового колеса.
5. Устройство по любому из пп. 1-4, в котором средство колебания движущей силы выделяет более длительный период времени на операцию увеличения движущей силы, чем на операцию уменьшения движущей силы, во время неоднократного колебания движущей силы у ходового колеса.
6. Устройство по п.5, в котором средство колебания движущей силы устанавливает период времени операции увеличения движущей силы и период времени операции уменьшения движущей силы в постоянные соотношения независимо от скорости рулевого управления.
7. Устройство по любому из пп.1-4, в котором величина колебания движущей силы является такой, что пассажир транспортного средства не ощущает ускорения или замедления.
8. Устройство по любому из пп.1-4, в котором средство колебания движущей силы устанавливает движущую силу у ходового колеса в большее значение и в меньшее значение, чем целевая движущая сила в качестве опорного уровня, во время неоднократного колебания движущей силы у ходового колеса, при этом целевая движущая сила определяется на основании состояния эксплуатации транспортного средства.
9. Устройство по любому из пп.1-4, в котором:
транспортное средство является транспортным средством с электрическим приводом, в котором, по меньшей мере, часть движущей силы подается электрическим двигателем; и
средство колебания движущей силы выполняет, посредством электрического двигателя, управление неоднократным колебанием движущей силы у ходового колеса.

