ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
По настоящей заявке испрашивается приоритет по предварительной заявке на патент США 61/101308, поданной 30 сентября 2008 г., которая включена в настоящее описание посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Настоящая заявка относится, в общем, к определению положения объекта, введенного в живой организм, и, в частности, к обнаружению и компенсации артефактов, возникающих во время определения положения зонда в живом организме.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Широкий диапазон медицинских процедур включает в себя размещение объектов типа датчиков, трубок, катетеров, дозирующих устройств и имплантатов внутри тела. Для помощи врачам при визуализации объекта и его окружения во время упомянутых процедур часто применяют способы визуализации в реальном времени. Однако в большинстве ситуаций трехмерная визуализация в реальном времени невозможна или нежелательна. Вместо этого часто применяют системы для получения в реальном времени пространственных координат внутреннего объекта.
В заявке на патент США 2007/0016007 авторов Govari et al., содержание которой включено в настоящее описание посредством ссылки, описана гибридная система определения положения по магнитным полям и импедансу. Система содержит зонд, выполненный с возможностью введения в полость тела субъекта.
В патенте США 6574498 автора Gilboa, содержание которого включено в настоящее описание посредством ссылки, описана система для определения положения изделия в полости непрозрачного тела. В системе заявлено применение измерительного преобразователя, который взаимодействует с первичным полем, и нескольких измерительных преобразователей, которые взаимодействуют с вторичным полем.
В патенте США 5899860 авторов Pfeiffer, et al., содержание которого включено в настоящее описание посредством ссылки, описана система для определения положения катетера внутри тела пациента. Корректирующую функцию определяют по разности между калибровочными положениями, выведенными из полученных сигналов положения, и известными истинными калибровочными положениями, и после этого положения катетера, выведенные из сигналов положения, корректируют на последующих стадиях измерения в соответствии с корректирующей функцией.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Технический результат, достигаемый при использовании предложенной группы изобретений, заключается в улучшении точности отслеживания местоположения объекта, расположенного внутри тела, посредством обнаружения и компенсации артефактов (отклонений в измерениях), возникающих в процессе отслеживания местоположения.
В соответствии с настоящим изобретением предлагается способ, содержащий этапы, на которых:
устанавливают накладные электроды в гальваническом контакте с телом пациента;
устанавливают инструмент отображения, содержащий электрод отображения, во множестве областей в теле пациента;
отслеживают инструмент отображения в разных положениях в каждой из областей с использованием системы измерения местоположения;
для каждой области генерируют соответствующую совокупность калибровочных токов между накладными электродами и электродом отображения в разных положениях в области;
выводят для каждой области соответствующую зависимость между соответствующей совокупностью калибровочных токов и разными положениями таким образом, чтобы разные области обладали разными соответствующими зависимостями;
устанавливают инструмент для исследования, содержащий электрод для исследования, в местоположение в теле пациента и генерируют токи инструмента для исследования между накладными электродами и электродом для исследования в местоположении; и
определяют местоположение с учетом разных соответствующих зависимостей и токов инструмента для исследования.
Накладные электроды, как правило, содержат опорные накладные электроды, содержащие опорные электромагнитные (EM) датчики, при этом опорные накладные электроды задают EM систему координат и систему координат тела, причем способ содержит этап сравнения калибровочных токов опорных накладных электродов с опорными сигналами из опорных EM-датчиков для установления зависимости между EM системой координат и системой координат тела.
Способ может содержать этап определения относительных импедансов между накладными электродами для компенсации изменения эффективных площадей между накладными электродами и телом.
Способ может содержать этап фильтрации калибровочных токов с учетом, по меньшей мере, чего-то одного из дыхания тела и движения органа в теле, чтобы генерировать фильтрованные калибровочные токи, при этом этап вывода соответствующей зависимости содержит этап формирования зависимости с учетом фильтрованных калибровочных токов.
В одном варианте осуществления этап вывода соответствующей зависимости содержит этап увязки объема, содержащего разные положения с зависимостью и этап определения местоположения содержит этап проверки того, что местоположение находится внутри объема. Как правило, соответствующая зависимость содержит первичную матрицу, и способ содержит этап разбиения объема на частичные объемы и этап увязки соответствующих вторичных матриц с частичными объемами, при этом каждая из соответствующих вторичных матриц связывает соответствующую подсовокупность разных положений с подсовокупностью калибровочных токов, причем этап определения местоположения содержит этап выбора одной из вторичных матриц с учетом данной совокупности калибровочных токов. Местоположение обычно содержит средневзвешенное значение местоположений инструмента для исследования, определенное из первичной матрицы и, по меньшей мере, одной из вторичных матриц.
Этап вывода соответствующей зависимости может содержать этап проверки того, что число разных положений превышает предварительно заданное число разных положений до этапа вывода соответствующей зависимости.
В альтернативном варианте осуществления этап генерирования соответствующей совокупности калибровочных токов содержит этап определения, соответствует ли совокупность калибровочных токов последующей совокупности калибровочных токов, посредством формирования сравнения разных положений, связанных с совокупностью и последующей совокупностью. Способ может также содержать этап использования последующей совокупности при формировании зависимости, если сравнение недействительно, и этап отбрасывания последующей совокупности, если сравнение действительно.
В некоторых вариантах осуществления инструмент для исследования не отслеживается системой измерения местоположения.
В предлагаемом варианте осуществления способ может также содержать этапы, на которых:
устанавливают, одновременно с инструментом для исследования, дополнительный инструмент для исследования, содержащий дополнительный электрод для исследования, в дополнительном местоположении в теле пациента;
генерируют токи дополнительного инструмента для исследования между накладными электродами и дополнительным электродом для исследования и
определяют дополнительное местоположение с учетом отличающихся соответствующих зависимостей и токов дополнительного инструмента для исследования.
Система измерения местоположения может содержать, по меньшей мере, какую-то одну из электромагнитной (EM) системы слежения, флуороскопической системы слежения, системы слежения на основе магнитно-резонансной визуализации (MRI) и ультразвуковой системы слежения.
Этап установки накладных электродов обычно может содержать этап установки, по меньшей мере, одного из накладных электродов на тело пациента. В альтернативном варианте этап установки накладных электродов может содержать этап установки, по меньшей мере, одного из накладных электродов в теле пациента.
Соответствующая зависимость обычно содержит матрицу, устанавливающую зависимость между соответствующей совокупностью калибровочных токов и разными положениями.
В дополнительном предлагаемом варианте осуществления способ содержит этапы, на которых:
устанавливают дополнительный инструмент отображения в контакте с подвижным органом тела и
отслеживают дополнительный инструмент отображения с использованием системы измерения местоположения для генерирования положений дополнительного инструмента отображения;
при этом этап определения местоположения содержит этап определения местоположения с учетом положений дополнительного инструмента отображения.
В соответствии с другим вариантом осуществления настоящего изобретения дополнительно предлагается устройство для отслеживания положения, содержащее:
инструмент для исследования, содержащий проводящий электрод, который подсоединяют для генерирования токов в теле пациента в ответ на приложение напряжения возбуждения к проводящему электроду:
абляционный накладной электрод, устанавливаемый в гальваническом контакте с телом и выполненный с возможностью передачи абляционного тока в тело;
накладные поверхностные электроды, устанавливаемые в гальваническом контакте с телом, которые принимают соответствующие токи на поверхности тела от проводящего электрода; и
процессор, который определяет местоположение инструмента для исследования с учетом соответствующих токов на поверхности тела, при одновременной компенсации отклонения соответствующих токов на поверхности тела абляционным накладным электродом.
Компенсация отклонения обычно включает в себя запись соответствующих токов на поверхности тела перед передачей абляционного тока и определение местоположения с использованием записанных соответствующих токов на поверхности тела.
В альтернативном варианте компенсация отклонения содержит приложение напряжения возбуждения абляционного накладного электрода к абляционному накладному электроду и определение калибровочных токов в накладных поверхностных электродах, формируемых в ответ на напряжение возбуждения абляционного накладного электрода. Устройство может содержать абляционное устройство, выполненное с возможностью генерирования абляционного тока, при этом приложение напряжения возбуждения абляционного накладного электрода к абляционному накладному электроду содержит приложение напряжения возбуждения абляционного накладного электрода посредством абляционного устройства.
Устройство может также содержать абляционный катетер, при этом приложение напряжения возбуждения абляционного накладного электрода содержит приложение напряжения возбуждения абляционного накладного электрода при одновременном отсоединении абляционного катетера от абляционного устройства. В альтернативном варианте приложение напряжения возбуждения абляционного накладного электрода содержит приложение напряжения возбуждения абляционного накладного электрода, при одновременном соединении абляционного катетера с абляционным устройством.
В соответствии с вариантом осуществления настоящего изобретения дополнительно предлагается способ оценки импеданса, содержащий этапы, на которых:
устанавливают накладные электроды в гальваническом контакте с телом пациента;
устанавливают инструмент для исследования, содержащий проводящий электрод, во множестве областей внутри тела;
для каждой области генерируют соответствующие межэлектродные токи между накладными электродами;
для каждой области генерируют соответствующие токи инструмента для исследования между проводящим электродом и накладными электродами; и
для каждой области определяют соответствующий импеданс между каждым из накладных электродов и телом с учетом соответствующих межэлектродных токов и соответствующих токов инструмента для исследования.
Этап генерирования соответствующих межэлектродных токов обычно содержит этап настройки межэлектродных токов равными соответствующим переменным токам, имеющим разные соответствующие частоты.
В соответствии с вариантом осуществления настоящего изобретения дополнительно предлагается устройство, содержащее:
накладные электроды, устанавливаемые в гальваническом контакте с телом пациента;
инструмент отображения, содержащий электрод отображения и выполненный с возможностью установки во множестве областей в теле пациента;
систему измерения местоположения, выполненную с возможностью отслеживания инструмента отображения в разных положениях в каждой из областей;
инструмент для исследования, содержащий электрод для исследования и выполненный с возможностью установки в местоположение в теле пациента и генерирования токов инструмента для исследования между накладными электродами и электродом для исследования в местоположении; и
процессор, который для каждой области генерирует соответствующую совокупность калибровочных токов между накладными электродами и электродом отображения в разных положениях в области и выводит для каждой области соответствующую зависимость между соответствующей совокупностью калибровочных токов и разными положениями таким образом, чтобы разные области характеризовались разными соответствующими зависимостями, и при этом процессор выполнен с возможностью определения местоположения с учетом разных соответствующих зависимостей и токов инструмента для исследования.
В соответствии с вариантом осуществления настоящего изобретения дополнительно предлагается способ отслеживания положения, содержащий этапы, на которых:
подсоединяют инструмент для исследования, содержащий проводящий электрод, для генерирования токов в теле пациента в ответ на приложение напряжения возбуждения к проводящему электроду;
устанавливают абляционный накладной электрод в гальваническом контакте с телом, чтобы передавать абляционный ток в тело;
устанавливают накладные поверхностные электроды в гальваническом контакте с телом, чтобы принимать соответствующие токи на поверхности тела от проводящего электрода; и
определяют местоположение инструмента для исследования с учетом соответствующих токов на поверхности тела в то время, как компенсируют отклонение соответствующих токов на поверхности тела абляционным накладным электродом.
В соответствии с вариантом осуществления настоящего изобретения дополнительно предлагается устройство для оценки импеданса, содержащее:
накладные электроды, устанавливаемые в гальваническом контакте с телом пациента;
инструмент для исследования, содержащий проводящий электрод, выполненный с возможностью установки во множестве областей внутри тела; и
процессор, который выполнен с возможностью для каждой области:
генерирования соответствующих межэлектродных токов между накладными электродами,
генерирования соответствующих токов инструмента для исследования между проводящим электродом и накладными электродами и
определения соответствующего импеданса между каждым из накладных электродов и телом с учетом соответствующих межэлектродных токов и соответствующих токов инструмента для исследования.
Предмет настоящего изобретения понятно изложен в нижеследующем подробном описании вариантов осуществления настоящего изобретения, взятом в связи с чертежами, на которых:
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1A - схематичное изображение системы определения положения, использующей гибридный катетер, и на фиг. 1B приведен схематичный местный вид дистального конца гибридного катетера в соответствии с вариантом осуществления настоящего изобретения;
Фиг. 2A - блок-схема последовательности операций, схематично поясняющая процесс работы системы определения положения, и на фиг. 2B приведена упрощенная блок-схема системы в соответствии с вариантом осуществления настоящего изобретения;
Фиг. 3 - схематичный чертеж, иллюстрирующий векторную взаимосвязь для опорных аппликаторов, применяемых в системе определения положения в соответствии с вариантом осуществления настоящего изобретения;
Фиг. 4 - принципиальная эквивалентная электрическая схема, изображающая абляционное устройство, подсоединенное к телу пациента, в соответствии с вариантом осуществления настоящего изобретения;
Фиг. 5 - схематичное изображение схемы аппликатора для активной токовой локализации (ACL) в соответствии с вариантом осуществления настоящего изобретения;
Фиг. 6 - график различных составляющих местоположения опорного катетера венечного синуса в соответствии с вариантом осуществления настоящего изобретения;
Фиг. 7 - график частотной характеристики фильтра в соответствии с вариантом осуществления настоящего изобретения;
Фиг. 8 - упрощенная блок-схема, характеризующая составляющие следящего модуля ACL (для активной токовой локализации) в соответствии с вариантом осуществления настоящего изобретения;
Фиг. 9 - схема, отражающая параметры, используемые при задании частичных объемов, на которые разбивают исследуемую область, в соответствии с вариантом осуществления настоящего изобретения;
Фиг. 10 - блок-схема последовательности этапов способа, выполняемого процессором в системе определения положения для генерирования матриц преобразования токов в координаты (CPM) в соответствии с вариантом осуществления настоящего изобретения; и
Фиг. 11 - блок-схема последовательности этапов способа, выполняемого процессором для генерирования положений катетера с использованием матриц CPM, сгенерированных по блок-схеме последовательности операций, показанной на фиг. 10, в соответствии с вариантом осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
ОБЩЕЕ ПРЕДСТАВЛЕНИЕ
В вариантах осуществления настоящего изобретения используют подсистемы слежения двух типов для измерения местоположения и ориентации объекта, в качестве которого в настоящем описании для примера взят наконечник катетера, в теле пациента.
Одна из подсистем, именуемая в настоящей заявке подсистемой следящего устройства для усовершенствованной токовой локализации (ACL), генерирует ток от электрода на наконечнике катетера и измеряет распределение токов на нескольких аппликаторах, помещенных на поверхности тела, и/или на проводящих элементах, установленных в теле. Местоположение электрода вычисляют по распределению токов.
Вторая подсистема может быть любой системой слежения, которая работает на основе принципа, отличающегося от принципа работы подсистемы ACL. Вторая подсистема обычно обеспечивает более точные результаты, чем результаты, обеспечиваемые подсистемой ACL, когда последняя работает в одиночку. Вторые подсистемы, которыми можно воспользоваться, содержат, но без ограничения, визуализирующие системы, например, электромагнитные (EM) системы, флуороскопические системы, системы магнитно-резонансной визуализации (MRI) и ультразвуковые системы. Вторая подсистема может также содержать комбинации из систем слежения, работающих на основе принципов, отличающихся от принципов работы подсистемы ACL. Формируют зависимости между результатами двух подсистем, и эти зависимости применяют к измеренным токам подсистемы ACL для повышения ее точности слежения. Например, в настоящем описании приняты зависимости на базе матриц.
В предложенном нижеописанном варианте осуществления вторая подсистема содержит EM-подсистему следящего устройства. Следящее EM-устройство использует магнитные поля, сгенерированные тремя трехкатушечными источниками в установочной приставке (LP), внешней относительно пациента, и результаты измерений полей, выполненные EM-датчиками, расположенными в наконечнике катетера, для вычисления местоположения наконечника катетера. Следящее EM-устройство обычно обеспечивает местоположение наконечника катетера и ориентацию с точностью около соответственно 1 мм и 1 градуса.
В фазе калибровки предлагаемого варианта осуществления инструмент отображения, содержащий EM-датчики и электрод, перемещают в несколько положений внутри тела пациента. Инструмент отображения именуется также в настоящем описании гибридным катетером. Результаты EM-измерений и результаты измерений тока записывают для нескольких положений. Результаты EM-измерений используют для обучения следящего устройства ACL определению, по результатам измерений тока, местоположения с более высокой степенью точности, чем степень точности определения одним следящим устройством ACL. Следящее устройство ACL, после обучения, можно применять в фазе слежения для отслеживания местоположений инструментов для исследования, например, катетеров, которые не содержат EM-датчиков.
Многие упомянутые инструменты для исследования, именуемые также в настоящем описании негибридными катетерами, обычно могут отслеживаться одновременно путем приложения переменных напряжений возбуждения, имеющих соответствующие частоты, разные для разных негибридных катетеров.
Результаты измерения местоположения следящим EM-устройством обеспечиваются в координатах LP, тогда как координаты ACL обеспечиваются в связи с координатами тела. Для установления связи между двумя системами обозначения местоположения применяют два метода корреляции:
(1) Местоположения следящего EM-устройства преобразуют в соответствующие местоположения в системе координат тела, которая задается тремя аппликаторами на спине пациента.
(2) Внутренний опорный катетер можно применять для обнаружения динамического перемещения, которое обычно связано, главным образом, с дыханием.
В альтернативном варианте осуществления настоящего изобретения на пациенте применяют абляционное устройство. Абляционное устройство использует абляционный накладной электрод, помещенный в контакте с телом, который передает абляционный ток из абляционного устройства в тело. Абляционный накладной электрод отклоняет ток от накладных поверхностных электродов, и отклонение тока, если его не компенсировать, будет создавать ошибки положений, определяемых процессором. В процессе калибровки, процессор компенсирует отклонение тока, обычно, посредством приложения напряжения возбуждения к абляционному накладному электроду и, таким образом, генерирования калибровочных токов в накладных поверхностных электродах. Процессор использует калибровочные токи и результаты измерений тока, отклоненного абляционным устройством, для коррекции ошибок вычисленных положений катетера, которые возникали бы в ином случае.
Некоторые аспекты отслеживания путем сочетания EM-ACL описаны в заявке на патент США 2007/0016007, которая принадлежит заявителю настоящей заявки и описание которой включено в настоящее описание посредством ссылки. Варианты осуществления настоящего изобретения повышают точность систем слежения на основе EM-ACL.
ОПИСАНИЕ СИСТЕМЫ
На фиг. 1A представлено схематичное изображение системы 36 определения положения, использующей гибридный катетер 20, и на фиг. 1B приведен схематичный местный вид дистального конца гибридного катетера в соответствии с вариантом осуществления настоящего изобретения. Гибридный катетер может также именоваться в настоящем описании катетером отображения. Предполагается, что с системой 36 работает медицинский специалист 56.
В качестве примера, если в нижеследующем описании не указано иначе, то предполагается, что катетер 20 отображения применяют в инвазивной процедуре внутри камеры сердца 38 субъекта 40. В альтернативном варианте систему 36 определения положения можно использовать с зондами, аналогичными катетеру 20 в других полостях тела. Субъекта 40 помещают в магнитное поле, генерируемое, например, установкой под субъектом установочной приставки 43, содержащей катушки 42 генератора магнитных полей. Магнитные поля, генерируемые катушками 42, генерируют электрические сигналы в катушках 24, 26 и 28 электромагнитного (EM) датчика 22, расположенного на дистальном конце катетера 20. Электрические сигналы передаются в блок 44 управления, который анализирует сигналы, чтобы определять координаты положения и ориентацию катетера 20. В альтернативном варианте катушки в датчике 22 магнитного поля можно возбуждать для генерирования магнитных полей, которые измеряются катушками 42.
Блок 44 управления содержит процессор 46, обычно компьютер с соответствующими схемами обработки сигналов. Процессор использует память 47, которая обычно содержит как энергозависимое, так и энергонезависимое запоминающие устройства, в которых сохраняются данные для хирургической системы 36. Процессор соединен так, чтобы управлять пультом 52, который может обеспечивать визуальную индикацию 54 местоположения катетера 20.
Блок 44 управления содержит формирователи 56I переменных токов, которые служат процессору 46 для подводки токов в проводящие электроды 30, 32 и 34 катетера отображения, которые расположены на дистальном конце катетера 20 отображения. Процессор 46 устанавливает разные частоты переменного тока, подводимого в каждый электрод катетера 20. Электроды катетера соединены проводами, проходящими по вводной трубке, с цепями измерения тока и напряжения в блоке 44 управления.
Блок управления соединен проводами с накладными поверхностными электродами, именуемыми также в настоящем описании накладными электродами, которые могут быть накладными электродами любого типа, известными в данной области, например, дисковыми электродами, игольчатыми электродами, подкожными зондами или аппликационными электродами. Накладные электроды обычно находятся в гальваническом контакте с поверхностью тела субъекта 40 и принимают с поверхности тела токи, протекающие на поверхности тела. В тех случаях, когда в нижеследующем описании упоминаются аппликационные электроды или аппликаторы, следует понимать, что в вариантах осуществления настоящего изобретения могут применяться вышеупомянутые электроды других типов.
В некоторых вариантах осуществления, по меньшей мере, один из накладных электродов может быть установлен в гальваническом контакте с телом или внутри тела субъекта 40. Блок 44 управления обычно отслеживает положение упомянутых внутренне расположенных накладных электродов, например, благодаря наличию, в конфигурации упомянутых накладных электродов, следящих катушек, аналогичных катушкам 24, 26 и 28 в катетере 20. Если не указано иначе, то в нижеследующем описании предполагается, для простоты, что накладные электроды расположены на теле субъекта 40. Специалисты со средним уровнем компетентности в данной области техники смогут распространить настоящее описание, с соответствующими изменениями, на накладные электроды, расположенные внутри тела субъекта 40.
Например, в настоящем описании предполагается, что накладные поверхностные электроды содержат адгезивные накожные аппликаторы 60, 62, 64, 66, 68 и 70, именуемые в настоящем описании, в общем, накладками 60P для активной токовой локализации (ACL) или накладкой ACL с индексом «I», где I является целым числом от 1 до 6. Накладку ACL 60P можно размещать в любых удобных местах на поверхности тела субъекта 40 вблизи зонда. Накладки ACL 60P обычно содержат соответствующие следящие катушки, аналогичные катушкам 24, 26 и 28 в катетере 20. В альтернативных вариантах осуществления изобретения число накладных поверхностных электродов может изменяться. Накладные поверхностные электроды принимают различающиеся токи отображения от электродов катетера отображения и различающиеся токи анализируют для определения местоположения или положения катетера 20. Следовательно, катетер 20 содержит два компонента для измерения его местоположения, из которых один компонент работает в EM-подсистеме системы 36, и другой компонент работает в подсистеме ACL системы 36. Катетер 20 называется также гибридным катетером.
Блок 44 управления содержит также генераторы 56V напряжения, которые соединены с аппликаторами ACL «i» соответствующими соединительными проводами и которые применяются процессором 46 для измерения импеданса аппликаторов ACL.
Токи от формирователей 56I и генераторов 56V различаются процессором 46, работающим с токами и напряжениями с разными частотами. Следовательно, существует шесть однозначных частот генераторов, подающих напряжение в аппликаторы ACL, и большое число других однозначных частот для формирователей, подводящих ток в катетеры.
В системе 36 может быть, по меньшей мере, один другой гибридный катетер, как правило, аналогичный катетеру 20, который отслеживается системой обычно таким образом, как отслеживается катетер 20. Для ясности, на фиг. 1A другие катетеры не показаны. Кроме того, в системе 36 могут быть другие негибридные катетеры, содержащие, по меньшей мере, один электрод, аналогичный электродам 30, 32 и 34, но не содержащие датчик типа датчика 22. Негибридные катетеры именуются в настоящем описании катетерами для исследования, и электроды катетеров для исследования также именуются проводящими электродами катетеров для исследования. Система 36 может отслеживать упомянутые катетеры для исследования. Например, один подобный негибридный катетер 21 показан на фиг. 1A.
В одном варианте осуществления имеется приблизительно 90 частот для формирователей 56I тока, и поэтому возможно одновременное отслеживание до 90 электродов катетеров в системе 36.
Предполагается, что в системе 36 катетер 23, который может быть гибридным или негибридным катетером, применяется для абляции области в теле 40. Катетер 23 именуется также в настоящем описании абляционным катетером. Для замыкания обратной цепи абляционного тока, используемого абляционным катетером 23, абляционный накладной электрод 90, именуемый также в настоящем описании абляционным аппликатором 90, гальванически присоединен к телу 40. Аппликатор 90 и абляционный катетер 23 соединены проводами с высокочастотным (RF) абляционным модулем 48 в пульте 40. Пульт содержит также переключатель 25, позволяющий специалисту 56 управлять модулем 48.
Накожные аппликаторы содержат, как для примера предполагается в настоящем описании, три адгезивных накожных аппликатора 80, 82 и 84, обычно размещают на спине субъекта 40 для использования в качестве точек отсчета положения. Аппликаторы 80, 82 и 84 обычно называются в настоящем описании опорными аппликаторами 80R. Каждый опорный аппликатор 80R содержит EM-датчик, который обычно аналогичен датчику 22 и который обеспечивает предоставление данных положения соответствующего ему аппликатора в процессор 46. Опорные аппликаторы 80R соединены проводами с блоком 44 управления.
Система 36 может также содержать опорный позиционный датчик, например катетер для внутренней установки, вводимый в подвижный орган тела 40, как предполагается в настоящем описании, в сердце 38 и удерживаемый в, по существу, неподвижном положении относительно подвижного органа. В настоящем описании предполагается, что опорный датчик содержит опорный катетер 27 венечного синуса (CSRC) и называется также в настоящем описании опорным катетером 27. Катетер 27 обычно является гибридным катетером. Посредством сравнения положения катетера 20 с положением опорного катетера 27 точно определяются координаты катетера 20 относительно сердца, независимо от движений сердца.
Система 36 обычно содержит другие элементы, которые, для простоты, не показаны на фигурах и которые упоминаются, при необходимости, в нижеследующем описании. Например, система 36 может содержать ЭКГ-монитор, подсоединенный для приема сигналов от, по меньшей мере, одного из накладных поверхностных электродов, чтобы обеспечивать сигнал синхронизации по ЭКГ в блок 44 управления.
Конфигурация, показанная на фиг. 1A, является примерной конфигурацией, которая выбрана только для концептуальной ясности. В альтернативных вариантах осуществления можно также применить любую другую подходящую конфигурацию. Процессор 46 обычно содержит универсальный процессор, который запрограммирован в программном обеспечении для выполнения функций, описанных в настоящей заявке. Программное обеспечение может загружаться в процессор в электронной форме, например, по сети или, в качестве альтернативы или дополнительно, может обеспечиваться и/или храниться на материальном носителе, например, в магнитной, оптической или электронной памяти.
На фиг. 2A представлена блок-схема 100 последовательности операций, схематично поясняющая процесс работы системы 36, и на фиг. 2B приведена упрощенная блок-схема системы в соответствии с вариантом осуществления настоящего изобретения. Для управления системой 36 специалист 56 или другой оператор системы сначала применяет систему в фазе 101 калибровки, после чего система работает в фазе 103 слежения. Операции, выполняемые на каждом из этапов двух фаз, подробно описаны ниже. Как также поясняется ниже, некоторые из операций могут выполняться в обеих фазах.
На этапе 102 увязки системы координат увязывают координаты, измеренные в EM-системе координат и в системе координат активной токовой локализации (ACL). EM-подсистема 115 следящего устройства генерирует результаты измерений в EM-системе координат; подсистема 117 следящего устройства ACL генерирует результаты измерений в системе координат ACL, называемой также в настоящем описании системой координат тела. EM-подсистема следящего устройства измеряет местоположения с использованием электромагнитных полей, генерируемых катушками 24, 26 и 28. Следящее устройство ACL измеряет местоположения с использованием токов через аппликаторы ACL 60P.
Если не указано иначе, то нижеследующие этапы блок-схемы последовательности операций способа выполняются в промежуточных модулях 119 обработки данных, которые содержат модуль 119A системы координат тела, модуль 119B компенсации абляционного аппликатора, модуль 119C калибровки токов аппликаторов, модуль 119D планирования токов, модуль 119E временной декомпозиции и модуль 119F компенсации эффективной площади аппликатора.
На этапе 104 компенсации абляционного аппликатора процессор 46 выполняет измерения, чтобы определить, как можно скомпенсировать измеренные токи через аппликаторы ACL по причине отклонения токов через абляционный аппликатор. Процессор 46 выполняет измерения посредством генерирования токов в абляционном аппликаторе и/или аппликаторах ACL.
На этапе 106 калибровки аппликаторов ACL процессор 46 с использованием токов, аналогичных токам, использованным на этапе 104, определяет разности импедансов отдельных аппликаторов ACL. Разности импедансов оказывают влияние на токи в аппликаторах ACL, которые измеряются процессором.
На этапе 108 компенсации аппликатора процессор 46 осуществляет компенсацию с учетом изменений эффективной площади аппликаторов ACL. Изменения обычно вызываются такими факторами, как изменение проводимости аппликатора обычно из-за потовыделения и частичного отделения аппликатора от кожи пациента. Процессор 46 использует токи, аналогичные токам, генерируемым на этапах 104 и 106, для определения коэффициентов компенсации.
На этапе 110 планирования токов процессор измеряет токи в аппликаторах ACL, которые генерируются токами, вводимыми в отслеживаемые катетеры, и вносит поправки, определенные на этапах 104, 106 и 108, в токи.
На этапе 112 временной коррекции процессор выполняет компенсацию с учетом изменений токов, обусловленных тремя временными факторами: дрейфом, дыханием и сердцебиением. Компенсация реализуется обработкой токов, измеренных на этапе 110, разными фильтрами.
Окончательный этап 114 ACL содержит первоначальную фазу обучения, во время которой процессор сохраняет данные о токах и данные о местоположениях, полученные на вышеописанных этапах, и генерирует матрицы, устанавливающие зависимость между данными о токах и местоположениях. Этап 114 ACL выполняется в следящем модуле ACL 121. После того, как получено достаточное количество данных, процессор 46 применяет сгенерированные матрицы к данным о токах, полученным на этапе 112, для вычисления местоположения электродов на катетере 20. Процессор генерирует соответствующие матрицы для разных «кластеров» или областей сердца, чтобы повысить точность токовой локализации.
В последующем описании подробно поясняется каждый из этапов блок-схемы 100 последовательности операций способа.
СИСТЕМА КООРДИНАТ ТЕЛА
На фиг. 3 представлен схематичный чертеж, иллюстрирующий векторную взаимосвязь для опорных аппликаторов 80R, в соответствии с вариантом осуществления настоящего изобретения. Исходные положения аппликаторов показаны в виде аппликаторов 80, 82 и 84. Положения после перемещения показаны в виде аппликаторов 80', 82' и 84'.
В модуле 119A системы координат тела процессор 46 применяет взаимосвязь, определенную при выполнении этапа 102 увязки системы координат, показанного на блок-схеме 100 последовательности операций способа. Как упоминалось выше, система 36 содержит две подсистемы слежения: EM-подсистему 115 следящего устройства, использующую такие датчики, как датчик 22, и подсистему 117 следящего устройства ACL, использующую токи через аппликаторы 60P. Каждая подсистема работает в соответствующей системе координат. EM-подсистема 115 следящего устройства работает в EM-системе координат, которая, в общем, неподвижна относительно приставки 43. Подсистема 117 следящего устройства ACL работает в системе координат ACL, системе координат тела (BCS), которая, как принято считать, в общем, неподвижна относительно аппликаторов 80R. Аппликаторы 80R позволяют преобразовывать результаты измерений, выполненных в одной из подсистем, в другую подсистему. В фазе калибровки опорные аппликаторы 80R прикрепляют к спине субъекта 40, и поэтому любое движение субъекта относительно приставки 43 вызывает изменения сигналов EM-датчиков опорных аппликаторов.
В фазе калибровки процессор 46 анализирует сигналы из EM-датчиков на опорных аппликаторах 80R, чтобы определить исходную систему координат для BCS. В фазе слежения процессор периодически анализирует сигналы из EM-датчиков, чтобы определять изменения местоположения и ориентации системы координат BCS. Процессор способен обнаруживать, не изменились ли параметры системы сверх ожидаемых значений, и в таком случае может возвратиться к фазе калибровки.
В фазе калибровки процессор накапливает данные о местоположении аппликаторов 80R в координатах LP, т.е. координатах, измеряемых относительно установочной приставки (LP) 43, в течение времени patchlnitTime, обычно около 1 сек.
Затем процессор вычисляет среднее местоположение и стандартное отклонение для каждого аппликатора:
где i означает индекс выборки,
N означает число выборок за время patchlnitTime,
 означает значение выборки,
означает значение выборки,
 означает среднее значение для каждого аппликатора 1 и
означает среднее значение для каждого аппликатора 1 и
 означает стандартное отклонение .
означает стандартное отклонение .
В том случае, если значение меньше, чем предварительно заданное число, обычно около 1 мм, калибровка допускается, и тогда среднее  всех средних значений устанавливается как начало координат BCS:
всех средних значений устанавливается как начало координат BCS:

Радиус-вектор от каждого аппликатора к началу координат также вычисляется и сохраняется для дальнейшего использования:

Средний вектор, задаваемый уравнением (2), и три вектора, задаваемые уравнением (3), изображены на фиг. 3. В дополнение к началу координат, заданному уравнением (2), три вектора из уравнения (3) задают треугольник в плоскости, показанный на фигуре пунктирными линиями между аппликаторами 80, 82 и 84. Исходные оси x, y и z в BCS задают с использованием треугольника.
В фазе слежения системы 36 аппликаторы 80R могут перемещаться, как показано для примера аппликаторами 80', 82' и 84', и процессор 46 периодически измеряет новые положения аппликаторов обычно с периодом порядка одной секунды. В вариантах осуществления настоящего изобретения предполагается, что оси, заданные в фазе калибровки, перемещаются, приближенно, как твердое тело, и процессор 46 определяет поступательное перемещение и поворот осей из новых положений аппликаторов 80R в фазе слежения. Перед определениями новые положения аппликаторов подвергаются фильтрации для подавления шумов, причем фильтрация обычно заключается в низкочастотной фильтрации типа:
yi=ayi-1+(1-a)xi, (4)
где yi, yi-1 означают оценки текущего и предыдущего положений,
xi означает текущее определение положения и
a является коэффициентом от 0 до 1.
Обычно «a» в уравнении (4) выбирают так, чтобы при определении оценок текущего положения  существовала эффективная постоянная времени около 0,5 с. Следовательно, поскольку движение тела обычно совершается медленно, то упомянутая постоянная времени не оказывает существенного влияния на эффективность системы 36.
существовала эффективная постоянная времени около 0,5 с. Следовательно, поскольку движение тела обычно совершается медленно, то упомянутая постоянная времени не оказывает существенного влияния на эффективность системы 36.
Фильтрованные положения используют для определения нового вектора начала координат  , по существу, так, как описано выше для уравнения (3).
, по существу, так, как описано выше для уравнения (3).
По фильтрованным положениям процессор 46 определяет также матрицу T поворота с помощью способов, которые очевидны специалистам со средним уровнем компетентности в данной области техники, и, тем самым, связывает новую ориентацию осей с исходной ориентацией осей. Затем процессор применяет уравнение (5) (смотри ниже) для преобразования каждого измерения местоположения наконечника катетера обратно в исходные оси BCS.

где TT означает транспозицию T,
 означает вектор, представляющий измеренное местоположение наконечника катетера, и
означает вектор, представляющий измеренное местоположение наконечника катетера, и
 означает вектор наконечника катетера относительно исходных осей BCS.
означает вектор наконечника катетера относительно исходных осей BCS.
Вектор вычисляется на этапе ACL 114, описанном ниже.
КОМПЕНСАЦИЯ АБЛЯЦИОННОГО АППЛИКАТОРА
Как изложено выше со ссылкой на фиг. 1A, блок 44 управления содержит абляционное устройство 48, которое соединено с телом субъекта 40 посредством абляционного аппликатора 90 и абляционного катетера 23. Абляционный аппликатор и абляционный катетер обеспечивают линии тока в электроды ACL катетера 20 и/или 27 и в аппликаторы ACL 60P. На этапе 104 блок-схемы 100 последовательности операций способа (фиг. 2) процессор 46, с использованием модуля 119B компенсации абляционного аппликатора, осуществляет компенсацию с учетом токов, отклоняемых от упомянутых линий, как поясняется ниже.
На фиг. 4 представлена принципиальная эквивалентная электрическая схема, изображающая абляционное устройство 48, подсоединенное к телу пациента, в соответствии с вариантом осуществления настоящего изобретения. Формирователи 56I тока содержат формирователь 56IA, который может вводить ток в наконечник 23 абляционного катетера с частотой fA. Формирователи 56I содержат также формирователь 56IB, с помощью которого в фазе слежения система 36 может вводить ток в один из электродов ACL, в данном описании в электрод 30, с частотой fB. Для каждого электрода ACL обычно существует отдельный формирователь тока с соответствующей отдельной частотой, но, для простоты, на фигуре показан только один упомянутый формирователь и электрод. Оба формирователя 56IA и 56IB тока могут независимо управляться процессором 46. Как более подробно описано ниже, электрод ACL отслеживается посредством анализа разных токов в аппликаторах ACL 60P благодаря току, генерируемому формирователем 56IB.
Абляционное устройство 48 содержит высокочастотный (RF) генератор 120, который включается специалистом 56 с использованием переключателя 25, чтобы выполнить необходимую абляцию. Абляционное устройство 48 соединено с абляционным аппликатором 90, а также соединено через полосовой фильтр 122 с электродом наконечника абляционного катетера 23. Фильтр 122 работает как низкоимпедансный компонент для RF-энергии из генератора 120, и, хотя упомянутый фильтр ослабляет другие частоты, для данных частот имеется линия тока, которая существует даже в том случае, если переключатель 25 разомкнут. Как видно из фиг. 4, возможно существование линий тока, отличающихся от линий между электродом ACL и аппликаторами ACL 60P. Система 36 обеспечивает компенсацию для учета данных линий, как поясняется ниже.
В фазе калибровки процессор 46 размыкает переключатель 124 к наконечнику абляционного катетера, и поэтому через наконечник 23 абляционного катетера не существует никакой линии тока. В данном состоянии весь ток из формирователя 56IA протекает через абляционное устройство 48, через абляционный аппликатор 90 в аппликаторы ACL 60P.
Процессор 46 включает формирователь 56IA тока на единственной частоте fM, которая обычно близка к 105 кГц. На частоте fM процессор измеряет полный ток  , подводимый формирователем 56IA, и ток через каждый аппликатор ACL 60P,
, подводимый формирователем 56IA, и ток через каждый аппликатор ACL 60P,  , где i означает индекс аппликатора. Для всех индексов i процессор 46 вычисляет совокупность отношений для частоты fM:
, где i означает индекс аппликатора. Для всех индексов i процессор 46 вычисляет совокупность отношений для частоты fM:

Частотная зависимость аппликаторов известна по калибровке при изготовлении. Процессор 46 использует калибровку для определения совокупностей отношений  для каждой рабочей частоты fA в диапазоне, содержащем fM. Обычно, если fM равно 105 кГц, диапазон fM составляет от приблизительно 100 кГц до приблизительно 110 кГц.
для каждой рабочей частоты fA в диапазоне, содержащем fM. Обычно, если fM равно 105 кГц, диапазон fM составляет от приблизительно 100 кГц до приблизительно 110 кГц.
В фазе слежения и за исключением периода, когда абляционное устройство 120 включено замыканием переключателя 25, процессор 46 может измерять ток утечки l ablator,f через абляционный аппликатор 90 на каждой из различающихся общих частот f, которые процессор 46 использует для катетеров, работающих в системе 36. Разные измерения обычно делают посредством выполнения быстрого преобразования Фурье (FFT) измеренного тока через аппликатор. В варианте осуществления, в котором ток утечки не поддается измерению во время работы абляционного устройства 120, процессор 46 может использовать самый последний измеренный ток утечки перед включением абляции в качестве оценки тока утечки во время абляции.
В альтернативном варианте при использовании подходящих фильтров и/или других аппаратных средств, которые будут очевидны специалистам со средним уровнем компетентности в данной области техники, процессор 46 может измерять токи утечки I ablator,f, даже когда абляционное устройство 120 действует.
Кроме того, в фазе слежения процессор 46 измеряет токи I
i,f через каждый из аппликаторов «i» ACL. Процессор вычисляет оценку тока  на каждой частоте f, чтобы компенсировать утечку через аппликатор 90 согласно уравнению (7):
на каждой частоте f, чтобы компенсировать утечку через аппликатор 90 согласно уравнению (7):

Оценка тока применяется на этапе 106 калибровки аппликаторов, описанном ниже.
КАЛИБРОВКА ТОКОВ АППЛИКАТОРОВ
В идеале, измеренный на землю импеданс каждого аппликатора ACL равен нулю, но практически дело обстоит не так. Если импедансы отличаются от нуля, то измеренные токи через аппликаторы могут приводить к ошибкам прогнозирования местоположения катетера, например катетера 20, и поэтому, чтобы уменьшить такие ошибки, процессор 46 использует модуль 119C калибровки токов аппликаторов для выполнения калибровки аппликаторов ACL на этапе 106 калибровки аппликаторов (фиг. 2A и 2B). Калибровка выполняет компенсацию с учетом неравенства нулю импедансов, а также с учетом разностей импедансов между аппликаторами. Калибровка позволяет процессору 46 оценить ток, который будет протекать в аппликаторе, если импеданс аппликатора равен нулю.
Далее ссылки приведены на фиг. 5, на которой схематично изображена схема аппликатора ACL в соответствии с вариантом осуществления настоящего изобретения.
Все аппликаторы ACL имеют, в общем, одинаковые схемы. Каждый аппликатор ACL с индексом i содержит схему 152 дефибрилляционной защиты и схему 154 абляционной защиты. Две схемы соединены последовательно между аппликатором и землей. Как показано на фиг. 5, и для последующего анализа, для каждого аппликатора i,
j означает индекс частоты, обозначающий частоту f j, пересылаемую аппликатором.
z ij означает известный импеданс схемы 152 дефибрилляционной защиты. Известный импеданс обычно можно получить от изготовителя блока аппликаторов или определить путем анализа схемы 152.
q ij означает импеданс схемы 154 абляционной защиты. Импеданс схемы дефибрилляционной защиты оценивают во время нижеописанного процесса калибровки импедансов аппликаторов.
E i обозначает напряжение от источника напряжения 56V, которое управляет аппликатором i, с частотой f i.
I ij означает ток, измеренный через аппликатор i на частоте f j.
V ij означает напряжение, измеренное на аппликаторе i на частоте f j.
X ij означает фактическое напряжение на аппликаторе i на частоте f j.
В ходе процедуры калибровки импедансов аппликаторов для системы 36 процессор 46 использует соответствующий источник 56V напряжения для подводки тока в каждый аппликатор i с соответствующими частотами fi. Подводимые токи служат также в ходе процедуры компенсации эффективных площадей аппликаторов, описанной ниже.
Процессор применяет две упомянутые выше процедуры, т.е. процедуру калибровки импедансов аппликаторов и процедуру компенсации эффективных площадей аппликаторов, в вышеописанной фазе калибровки. Процессор может также применять две процедуры в фазе слежения. Например, если процессор определяет, что импеданс q ij аппликатора нельзя оценить, то процедура калибровки импедансов аппликаторов может выполняться в фазе слежения.
Токи подводятся с разными частотами j, и пульт 52 содержит ADC (схемы аналого-цифрового преобразования), которые процессор 46 мультиплексирует, чтобы измерять значения V ij последовательно и значения I ij одновременно.
В ходе процедуры калибровки импедансов аппликаторов процессор оценивает значение q
ij по значениям V
ij и I
ij, как правило, путем определения отношения  на каждой частоте и определения максимального соответствия, обычно максимального квадратичного соответствия, по измеренным частотам. Таким образом:
на каждой частоте и определения максимального соответствия, обычно максимального квадратичного соответствия, по измеренным частотам. Таким образом:

В фазе слежения процессор 46 измеряет значения I
ij и  на разных рабочих частотах f. В последующем анализе принимаются выражения уравнения (9).
на разных рабочих частотах f. В последующем анализе принимаются выражения уравнения (9).

где  означает сумму напряжений, измеренных на всех аппликаторах на частоте f
j
, и δ
ij означает символ Кронекера.
означает сумму напряжений, измеренных на всех аппликаторах на частоте f
j
, и δ
ij означает символ Кронекера.
Для конкретного аппликатора I, возбуждаемого на частоте j, применение закона Ома к схеме 154 абляционной защиты задает:
V ij = E ij + q ij I ij, так что

что приводит в преобразованном виде к:

Применение закона Ома и уравнения (10) к замкнутой схеме, показанной на фиг. 5, приводит для конкретного аппликатора I к:

где xij означает полное напряжение на аппликаторе i на частоте j.
Значения уравнения (11) можно использовать для определения матрицы σ проводимости тела, где σ задается матричными уравнениями:

где I означает матрицу токов аппликатора и X означает матрицу напряжений аппликатора. Токи аппликатора можно также записать в виде вектора s. Отрицательный знак в уравнении (12) предполагает правило, что положительные токи протекают в тело 40 и положительные токи измеряются также истекающими из тела. В альтернативном варианте можно записать уравнение, аналогичное уравнению (12), использующее матрицу Im импедансов, связанную с матрицами I и X.
Специалистам со средним уровнем компетентности в данной области будет понятно, что матрица σ' проводимости системы, которая является комбинацией матрицы σ проводимости тела и матрицы Rk сопротивлений аппликаторов выражается в виде:

где Id означает единичную матрицу,
σ означает матрицу проводимости, заданную уравнением (12), и
Rk означает диагональную матрицу сопротивлений аппликаторов с i-тым диагональным элементом (zik+qik), для катетера, передающего частоту fk.
Если в систему подается напряжение V, то ток, протекающий в системе, выражается в виде:

где V означает вектор напряжений и
 - измеренный вектор токов на частоте fk.
- измеренный вектор токов на частоте fk.
Уравнение (13b) указывает, что зависит от сопротивлений аппликаторов. Калиброванный ток, который не зависит от сопротивлений аппликаторов и, следовательно, не зависит от частоты fk, можно определить в виде:

где s означает калиброванный вектор токов.
Процессор 46 передает оценочные значения токов в каждом аппликаторе, выражаемые вектором s, в процесс компенсации эффективной площади аппликатора, описанный ниже.
КОМПЕНСАЦИЯ ЭФФЕКТИВНОЙ ПЛОЩАДИ АППЛИКАТОРА
Описание в настоящем разделе поясняет этап 108 компенсации для аппликатора (фиг. 2A), на котором процессор 46 в модуле 119F компенсации эффективной площади аппликатора выполняет процесс компенсации эффективной площади аппликатора, который компенсирует изменения эффективной площади аппликаторов ACL с индексами i. В настоящем разделе аппликаторы 60P различают путем обозначения их как аппликатор i и аппликатор j. Некоторыми причинами изменений эффективной площади аппликаторов ACL являются частичное отделение аппликатора от тела 40 пациента и изменения проводимости кожи обычно вследствие потоотделения. Модель компенсации эффективной площади аппликатора предполагает, что

где R ij означает импеданс между аппликатором i и аппликатором j,
C i, C j означают эффективные площади аппликатора i и аппликатора j,
d ij означает расстояние между аппликаторами i и j и
G является константой пропорциональности, которая является функцией, inter alia, проводимости среды.
При реализации процесса компенсации площадей процессор 46 генерирует ток Ij из истокового аппликатора j и измеряет каждый из токов Iij, принятых в других аппликаторах. Процессор 46 выполняет процесс для каждого аппликатора ACL таким образом, что для N аппликаторов процессор выполняет всего N(N-1) измерений тока.
Оценка импеданса mij между любыми двумя аппликаторами i, j определяется уравнением

где Vj означает напряжение, управляющее аппликатором j.
Из уравнения (15) нормированная оценка импеданса mij определяется как:

Процессор 46 вычисляет и сохраняет значения mij с использованием уравнения (16), в ходе реализации процесса компенсации площадей.
Ток Ij, сгенерированный на аппликаторе j, делится между другими аппликаторами в отношении, обратном импедансу между аппликатором j и другими аппликаторами. Следовательно, ток Iij из истокового аппликатора j в принимающий аппликатор i определяется в виде:

Подстановка уравнения (14) в уравнение (17) дает:

Подстановка значения для Iij в уравнение (16) и упрощение дают:

где n является целым числом от 1 до N и N равно числу аппликаторов ACL.
Уравнение (19) можно переписать в виде:

Как изложено выше, процессор 46 определил значения относительных импедансов mij.
Расстояния dij между аппликаторами в уравнении (20) можно измерить с использованием соответствующих, связанных с ними следящих катушек (и когда i=j, dij = 0).
Уравнение (20) является системой N(N-1) уравнений с N неизвестными, т.е. значениями C1, C2, …, CN. Систему уравнений (20) можно использовать для определения относительных значений C
i. Система уравнений имеет тип  , где A означает матрицу N(N-1)×N, которая зависит от mij и d
ij, и где
, где A означает матрицу N(N-1)×N, которая зависит от mij и d
ij, и где  является вектором, представляющим N значений C
j. Анализ A методом сингулярной декомпозиции (SVD) или анализ методом собственных векторов N×N матрицы
является вектором, представляющим N значений C
j. Анализ A методом сингулярной декомпозиции (SVD) или анализ методом собственных векторов N×N матрицы  обеспечивает решение для , как известно в данной области техники.
обеспечивает решение для , как известно в данной области техники.
В предположении, что процессор 46 выполняет анализ методом собственных векторов N×N матрицы , процессор выбирает собственный вектор с наименьшим собственным значением. Обычно значения mij и d
ij для матриц A и  фильтруются фильтром, аналогичным уравнению (4), где фильтр настраивают на постоянную времени порядка 10 секунд. Наименьший собственный вектор соответствует нормированным значениям 6 площадей Ci, именуемым Eai в настоящем описании. Процессор 46 обычно вычисляет значения Eai периодически, с периодом, который может быть установлен оператором 56. В одном варианте осуществления период имеет значение порядка 1 секунды.
фильтруются фильтром, аналогичным уравнению (4), где фильтр настраивают на постоянную времени порядка 10 секунд. Наименьший собственный вектор соответствует нормированным значениям 6 площадей Ci, именуемым Eai в настоящем описании. Процессор 46 обычно вычисляет значения Eai периодически, с периодом, который может быть установлен оператором 56. В одном варианте осуществления период имеет значение порядка 1 секунды.
Оценка s вектора токов, полученная из уравнения (13c), дает 6 соответствующих значений токов Ii в аппликаторах ACL. Для компенсации эффективных площадей Eai аппликаторов процессор 46 формирует нормированное значение каждого из токов:

где (In6) является шестимерным вектором токов.
Нормирование исключает эффекты, обусловленные изменениями эффективного сопротивления в области электрода катетера, например, обусловленное, возможно, приходом электрода в контакт с тканью, неоднородностью материала, окружающего электрод, и/или нестабильностью источника, подводящего ток в электрод катетера.
ПЛАНИРОВАНИЕ ТОКОВ
6 токов, определяемых уравнением (21), имеют только пять степеней свободы, так как их сумма всегда равна единице. Для предотвращения сингулярностей в дальнейшем анализе токов, на этапе 110 планирования токов 6 токов преобразуются, с использованием матрицы J преобразования, в пять независимых величин в модуле 119D планирования токов. Матрицу J преобразования выводят ортогонализацией матрицы
с взятием только векторов пяти последних строк получаемой матрицы.
После ортогонализации последние пять строк ортогонализированной матрицы дают:
Таким образом, токи из уравнения (21) представляются пятью эквивалентами токов в соответствии с уравнением (23):

В дополнение к выполнению нормирования уравнения (23) на этапе 110 планирования токов процессор 46 нормирует также признаки дыхания. Признаки дыхания являются показателями изменений сопротивления между аппликаторами ACL, обусловленных дыханием пациента, и процессор использует признаки для вычета, на этапе 112, частотной полосы, соответствующей частоте дыхания. Признаки дыхания, в общем, аналогичны по своим свойствам эффективным площадям (Ci) аппликаторов, и выражение для признаков выводят с использованием уравнения (20). Из уравнения (20)

Усреднение уравнения (24) по j и допущение, в качестве аппроксимации, что d ij =1(i≠j); d ij =0(i=j), приводит к определению признака дыхания Rli для аппликатора i в виде:

В предположении, что RIi записывается в виде N-мерного вектора  , mij можно записать в виде N×N матрицы M, с 0 по диагонали, и dij можно записать в виде матрицы D, определяемой уравнением (26) :
, mij можно записать в виде N×N матрицы M, с 0 по диагонали, и dij можно записать в виде матрицы D, определяемой уравнением (26) :
В данном случае процессор 46 итеративно оценивает новый вектор RI i,t по предыдущей оценке RI i,t-1 и новому измерению mij в соответствии с двухступенчатым процессом:
где t является параметром, указывающим последовательный порядок RI j,t и RI j,t-1.
Вектор RI j,t является шестимерным, но имеет только пять степеней свободы (как в случае с токами в уравнении (21)). Как показано ниже в уравнении (28), значения RI j, полученные из уравнения (27), дополнительно преобразуются таким же образом, как для токов в уравнении (21), посредством умножения на матрицу J с получением пяти эквивалентов дыхания для аппликаторов.

ВРЕМЕННАЯ ДЕКОМПОЗИЦИЯ
Варианты осуществления настоящего изобретения могут работать, по существу, в любой области тела пациента, и все такие области характеризуются, по меньшей мере, некоторым движением. Среда, окружающая сердце, является особенно динамичной, и движения сердца влияют на измерения токов аппликаторов ACL. Важными механизмами, оказывающими влияние на измерения, являются процессы сердцебиения и дыхания. Замедленным процессом, который также может влиять на измерения токов, является дрейф опорного катетера, обычно перемещение CSRC 27 (фиг. 1A).
Далее приведены ссылки на фиг. 6, на которой представлен график различных составляющих местоположения CSRC (опорного катетера венечного синуса), и на фиг. 7, на которой представлен график частотной характеристики фильтра, в соответствии с вариантом осуществления настоящего изобретения. График на фиг. 6 показывает временную декомпозицию по направлению, которое максимально увеличивает влияние дыхания на местоположение CSRC. График относится к случаю с животным, но декомпозиция, в общем, аналогична декомпозиции, которая имеет место в случае с человеком. Линия 230 представляет измеренное местоположение (за вычетом его среднего значения), которое разложено на три сигнала. Линия 232 первого сигнала представляет, в основном, составляющую сердцебиения, линия 234 второго сигнала представляет эффект дыхания, и линия 236 третьего сигнала представляет дрейф местоположения.
На этапе 112 временной коррекции (фиг. 2) измерения токов ACL с этапа 110 и измерения местоположения из EM-детектора в катетерах, содержащих такие детекторы, фильтруют для определения составляющих дрейфа, сердцебиения и дыхания, показанных на фиг. 6. В модуле 119E временной коррекции процессор 46 фильтрует упомянутые составляющие из измерений тока и местоположения и передает отфильтрованные значения для обработки в следящее устройство ACL, описанное ниже. Нефильтрованные значения, а также значения, которые отделены фильтрами, также доступны для следящего устройства ACL.
Составляющая дрейфа вычисляется с применением очень низкочастотного фильтра, обычно фильтра, имеющего постоянную времени порядка, приблизительно 10 секунд. Низкочастотный фильтр можно реализовать с использованием уравнения в форме уравнения (4). Составляющая дрейфа именуется в настоящем описании как Ydr i.
Составляющая дыхания вычисляется с применением фильтра с конечной импульсной характеристикой (FIR-фильтра) к результатам измерений токов и местоположения. FIR-фильтр действует как низкочастотный фильтр, и частотная характеристика подходящего фильтра показана на фиг. 7. Для генерирования частотной характеристики можно применить FIR-фильтр в форме, определяемой нижеприведенным уравнением (29)

где k является ядром, содержащим j значений kj,
xi означают результаты измерений токов и местоположений и
FIR(xi, k) означают отфильтрованные значения.
Составляющая дыхания равна результату на выходе FIR, минус составляющую дрейфа, т.е. составляющая дыхания равна FIR(x j ,k)-Ydr i.
Для исключения составляющей сердцебиения из измеренного местоположения можно применить низкочастотный фильтр с 1-секундной полосой пропускания. Данный подход вызывает задержку процесса около половины секунды между каждым измерением местоположения и соответствующим выходом временной декомпозиции. Это приводит к полусекундной задержке между любым перемещением катетера 20 и соответствующим обновлением визуальной индикации 54 (фиг. 2).
Все измерения, выполненные на этапе временной декомпозиции, передаются в следящий модуль ACL 121 на этапе 114 ACL блок-схемы 100 последовательности операций способа (фиг. 2A и 2B).
СЛЕДЯЩЕЕ УСТРОЙСТВО ACL
На этапе 114 ACL следящий модуль 121 вычисляет местоположение катетеров, например катетера 20 и катетера 21, с использованием разложенных по времени результатов измерений токов, сгенерированных на этапе 112. Результаты измерений, сгенерированные на этапе 112, объединяют в вектор  преобразования токов в координаты (CPM).
преобразования токов в координаты (CPM).
На фиг. 8 представлена упрощенная блок-схема, характеризующая составляющие следящего модуля ACL, и на фиг. 9 представлена схема, отражающая параметры, используемые при задании частичных объемов, на которые разбивают исследуемую область, в соответствии с вариантами осуществления настоящего изобретения.
Следящий модуль The ACL содержит два компонента, адаптивный процесс 300 оценивания CPM и процесс 304 применения CPM. Процесс 304 применения CPM дополнительно содержит модуль 308 выбора кластера и модуль 306 применения CPM, функции которых описаны ниже.
Адаптивный процесс 300 оценивания CPM использует результаты измерений из любого гибридного катетера, содержащего EM-датчик и соответствующий электрод, например, катетера 20, причем результаты измерений включены в векторы , чтобы вычислять матрицы CPM. В вариантах осуществления настоящего изобретения соответствующая матрица вычисляется для каждого частичного объема 400, именуемого также в настоящем описании кластерным объемом или кластером, в исследуемой области. Исследуемая область разбивается на кластеры разных размеров в соответствии с установкой разрешения для конкретного уровня кластера. Таким образом, при низком уровне разрешения область можно разбить на 16 кластеров, при этом каждый кластер имеет матрицу. При более высоком разрешении область можно разбить на 1024 кластера, имеющих соответствующие матрицы.
На построение матриц, создаваемых в процессе оценивания CPM, затрачивается время, так что на этапе 114 ACL существует некоторый период инициализации, и в течение данного периода процессор 46 получает исходные данные с этапа 112 декомпозиции. Что касается конкретного кластера, после того, как процессор накопил достаточно данных по данному кластеру, процессор может сгенерировать матрицу для кластера. Сгенерированная матрица сохраняется как данные 302 CPM в памяти 47 (фиг. 1A).
Прикладная программа применения CPM использует сгенерированные матрицы вместе с результатами измерений токов для электродов катетеров, чтобы вычислять местоположение каждого электрода в реальном времени. Вычисление выполняется в соответствии со следующим уравнением:

где является вектором CPM, построенным по разложенным по времени результатам измерений токов,
A означает матрицу для конкретного кластера и
 означает вектор положения электрода, упоминавшийся также в вышеприведенном уравнении (5).
означает вектор положения электрода, упоминавшийся также в вышеприведенном уравнении (5).
Вектор CPM обычно имеет следующие четыре набора элементов:
(i) 5 токовых элементов, соответствующих значениям, полученным из уравнения (23), для катетера отображения и
(ii) 6 признаков  дыхания для аппликаторов, соответствующих значениям RIi, полученным из уравнения (28).
дыхания для аппликаторов, соответствующих значениям RIi, полученным из уравнения (28).
В дополнение к вышеописанным элементам, если применяется опорный катетер, например, CSRC 27, вектор может также содержать:
(iii) 5 токовых элементов опорного катетера и
(iv) 3 элемента местоположения опорного катетера.
Элементы в наборах (ii), (iii) и (iv) являются значениями, выведенными после вышеописанной временной декомпозиции, т.е. за вычетом составляющей дрейфа для набора (ii) и за вычетом составляющей дыхания в наборах (iii) и (iv).
Процессор использует признаки дыхания для генерирования дескриптора дыхания, который является значением, показывающим, в какое время дыхательного цикла выполняют измерение.
Дескриптор дыхания обычно генерируется сначала, как только пациента располагают, как показано на фиг. 1A, и после того, как прикреплены аппликаторы i. В течение периода обучения в части дыхания, обычно порядка 30 сек, процессор 46 накапливает значения признаков дыхания.
После того, как признаки дыхания накоплены, процессор выполняет анализ признаков методом анализа главных компонентов (PCA), чтобы определить направление между элементами, имеющими максимальное собственное значение, следующим образом:
Направление, определяемое уравнением (31), применяется для вычисления значения дескриптора дыхания следующим образом:

где RDi является дескриптором дыхания для i-го аппликатора.
Среднее значение и диапазон значений RDi вычисляют следующим образом:

Среднее значение и диапазон применяются для вычисления нормированного значения RDni для RDi, которое находится в диапазоне от 0 до максимального значения CLNo, как в нижеприведенном уравнении (34). CLNo представляет собой число, задающее разрешение фиксатора обновлений, описанного ниже, и обычно приблизительно равен 5:

Значения RDni сохраняются в памяти 47.
На фиг. 9 показаны параметры, используемые для задания объема 400 кластера. Используемые параметры являются векторами, измеренными в системе координат следящего EM-устройства (фиг. 3). Каждый объем 400 кластера привязывается к его левому заднему нижнему углу 402, именуемому также в настоящем описании началом отсчета кластера, который является вектором CLPRL, имеющим наименьшие значения x, y и z из любых точек, содержащихся в кластере. Объем 400 кластера задается его центром, CLC, линейными длинами CLS от центра и уровнем разрешения кластера CLRRL, который задает длины сторон кластера при уровне RL разрешения.
При измерении в мм типичные стандартные значения CLC, CLS и CLRRL составляют:
CLC=(0, 0, 280),
CLS=(150, 150, 200),
CLRRL=(50, 20, 5), при уровне разрешения RL=1 (низкое разрешение). При больших значениях RL, соответствующих более высоким разрешениям, значения координат CLRRL уменьшаются.
Стандартные значения CLS и CLRRL соответствуют объему, который является прямоугольником, имеющим размеры 300 мм × 300 мм × 400 мм. Данный объем разбивается на равновеликие кластеры, имеющие меньшие размеры. При вышеприведенных стандартных размерах в прямоугольнике имеется 6×15×80 кластеров.
Для данного местоположения pi, индекс кластера соответствующего кластера находят вычислением из следующих выражений:
В выражениях (35):
Cldim является вектором (Cldim x ,Cldim y ,Cldim z ), где координаты вектора соответствуют числу кластеров в каждом измерении;
деление векторов определяется как деление каждого элемента векторного числителя на соответствующий элемент векторного знаменателя, так что, например,  .
.
Умножение векторов в последнем выражении является точечным или скалярным произведением.
При индексе Clx i,RL кластера начало отсчета кластера находят рекурсивным применением следующих выражений:
где Clinx имеет исходное значение Clx i,RL.
Ранее упомянутый фиксатор обновлений представляет собой индекс, который помечает местоположения, которые уже использовались для обновления матрицы CPM кластера. Индекс предотвращает использование нескольких измерений в местоположении для вычисления матрицы. Индекс (Uhl) фиксатора обновлений вычисляется следующим образом:

На фиг. 10 представлена блок-схема 500 последовательности операций способа, показывающая этапы, выполняемые процессором 46 для генерирования матриц CPM, в соответствии с вариантом осуществления настоящего изобретения. Этапы блок-схемы последовательности операций выполняются в ходе адаптивного процесса 300 оценивания CPM по мере того, как катетером 20 генерируется каждое измерение.
На начальном этапе 502 из любого гибридного катетера принимаются результаты измерений, и процессор формирует из результатов измерений вектор CPM, как изложено выше.
На первом этапе 504 фиксатора обновлений, с использованием уравнения (37), вычисляется индекс фиксатора обновлений для измерения.
При первом условии 506 процессор проверяет, существует ли уже индекс фиксатора обновлений, путем проверки, был ли индекс сохранен в памяти 47. Если индекс существует, то измерение игнорируется и выполнение блок-схемы последовательности операций завершается.
Если индекс не существует, то на этапе 508 сохранения индекс и результаты измерений сохраняются в буфере 310 (фиг. 8) в памяти 47. Результаты измерений сохраняются в виде вектора .
На этапе 510 установления связи с кластером измерение связывают с соответствующими кластерами. Связь устанавливают вычислением соответствующего индекса кластера по результату измерения в соответствии с уравнением (35). Измерение связывают с данным индексом кластера.
Затем начало отсчета кластера,  , вычисляется с использованием уравнения (36). С этого момента начала отсчета кластеров всех существующих ближайших соседних кластеров, которых может быть в сумме до 26, находят с использованием уравнения (38):
, вычисляется с использованием уравнения (36). С этого момента начала отсчета кластеров всех существующих ближайших соседних кластеров, которых может быть в сумме до 26, находят с использованием уравнения (38):
По значениям из уравнения (35) вычисляют индексы кластеров всех ближайших соседних кластеров.
Вычисления на данном этапе применяют ко всем значениям RL.
На втором этапе 512 фиксатора обновлений вычисляются индексы фиксаторов обновлений для соседних кластеров с использованием результата измерения, полученного на этапе 502, и уравнения (37). Если индекс обновления еще не занят, то результат измерения вводят в буфер 310, и индекс сохраняется. Если индекс уже занят, никаких операций не выполняется.
При втором условии 514 оценивается число M индексов обновления в каждом кластере Clx. Если M больше, чем предварительно заданное число, обычно порядка 40, то на этапе 516 матрицы кластера вычисляется матрица A CPM кластера с использованием уравнения (39):

где  означает измеренное местоположение гибридного катетера, и
означает измеренное местоположение гибридного катетера, и  является вектором CPM, описанным выше со ссылкой на уравнение (30), при индексе n обновления, n=1,2, …, M.
является вектором CPM, описанным выше со ссылкой на уравнение (30), при индексе n обновления, n=1,2, …, M.
Обычно две матрицы A CPM вычисляют для каждого кластера, одну, использующую результаты измерений с опорным катетером, например CSRC 27, и одну без результатов измерений опорного катетера, и затем блок-схема 500 последовательности операций способа завершается.
Если в условии 514 M не больше, чем предварительно заданное число, то блок-схема 500 последовательности операций способа завершается.
Вычисления в блок-схеме 500 последовательности операций способа обычно проверяются на различных стадиях, чтобы подтвердить, что вычисленные результаты являются непротиворечивыми. Например, на этапе 510 установления связи с кластером, если число существующих соседних кластеров меньше, чем предварительно заданное число, например 4, то можно предположить ошибку, и результат измерения на этапе 502 не принимается. Другие проверки на непротиворечивость функционирования блок-схемы последовательности операций способа будут очевидны специалистам со средним уровнем компетентности в данной области техники.
На фиг. 11 представлена блок-схема 600 последовательности операций способа, показывающая этапы, выполняемые процессором 46 для генерирования положений катетера с использованием матриц CPM, сгенерированных по блок-схеме 500 последовательности операций, в соответствии с вариантом осуществления настоящего изобретения. Блок-схема последовательности операций использует результаты измерений, которые используются также для генерирования матриц CPM.
Начальный этап 602, в общем, аналогичен начальному этапу 502 (фиг. 10), на котором результаты измерений поступают из гибридного катетера, и процессор формирует из результатов измерений вектор CPM.
Если результат  измерения является первым результатом измерения из катетера, то на этапе 604 вычисления положения в модуле 308 выбора кластера выбирают минимальное разрешение кластера, RL=1. Оценка
измерения является первым результатом измерения из катетера, то на этапе 604 вычисления положения в модуле 308 выбора кластера выбирают минимальное разрешение кластера, RL=1. Оценка  положения выполняется в соответствии с уравнением (40):
положения выполняется в соответствии с уравнением (40):

где Clx является индексом кластера для матриц A Clx,1 CPM, который, как предполагается, изменяется от 1 до M; и
 означает начало отсчета кластера для кластера с индексом Clx, вычисленным в соответствии с уравнением (35).
означает начало отсчета кластера для кластера с индексом Clx, вычисленным в соответствии с уравнением (35).
В первом условии 603 значение из уравнения (40) проверяется, чтобы убедиться в том, что данное значение находится внутри объема кластера (с индексом Clx кластера), посредством проверки того, что:

Уравнения (40) и (41) применяют к поступающим результатам измерений, пока выражение (41) является верным, с получением первой верной оценки положения.
Для последующих результатов  измерений, т.е. на последующих измерительных этапах 605, верность определенного положения проверяется оценкой разности между непосредственно предшествующими оценками положения и подтверждением того, что разность не превосходит предварительно заданного значения. Если разность больше, то измерение игнорируется.
измерений, т.е. на последующих измерительных этапах 605, верность определенного положения проверяется оценкой разности между непосредственно предшествующими оценками положения и подтверждением того, что разность не превосходит предварительно заданного значения. Если разность больше, то измерение игнорируется.
На этапе 606 уровней разрешения с использованием уравнения (35) вычисляются индексы кластеров для всех уровней RL разрешения. В дополнение, устанавливаются индексы n соседних кластеров с использованием процесса, описанного выше в отношении уравнения (38).
На этапе 608 многократной локализации матрицы A CPM, которые являются верными, для кластеров, установленных на этапе 606, применяются для определения оценок  положений для результата измерения в соответствии с уравнением (42):
положений для результата измерения в соответствии с уравнением (42):

На конечном этапе 610 оценки местоположения, значения, определенные из уравнения (42) умножаются на весовые коэффициенты, с использованием гауссового весового коэффициента:

Процессор 46 использует весовой коэффициент для формирования окончательной взвешенной суммы всех кластеров на всех уровнях с генерированием окончательной оценки местоположения, в соответствии с уравнением (44):

Следует понимать, что вышеописанные варианты осуществления приведены для примера и что настоящее изобретение не ограничено тем, что конкретно показано и охарактеризовано выше в настоящем описании. Наоборот, объем настоящего изобретения включает в себя как комбинации, так и подкомбинации различных признаков, охарактеризованных выше в настоящем описании, а также варианты и модификации, которые могут быть созданы специалистами в данной области техники после прочтения вышеприведенного описания и которые не известны из предшествующего уровня техники.
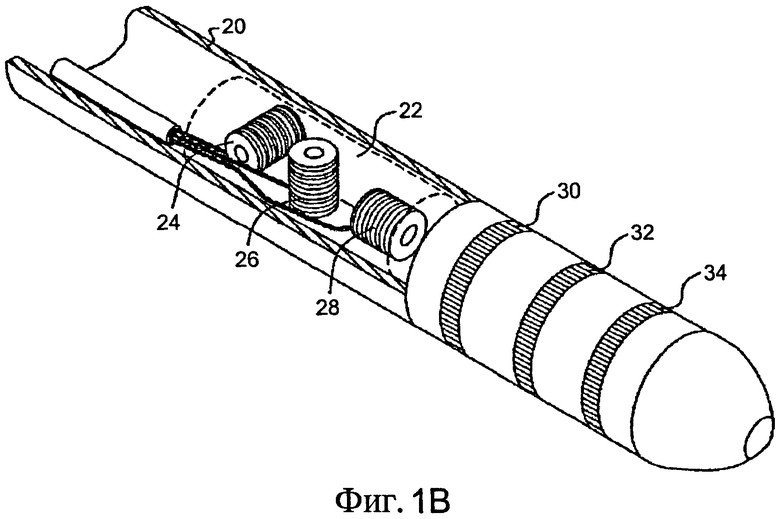
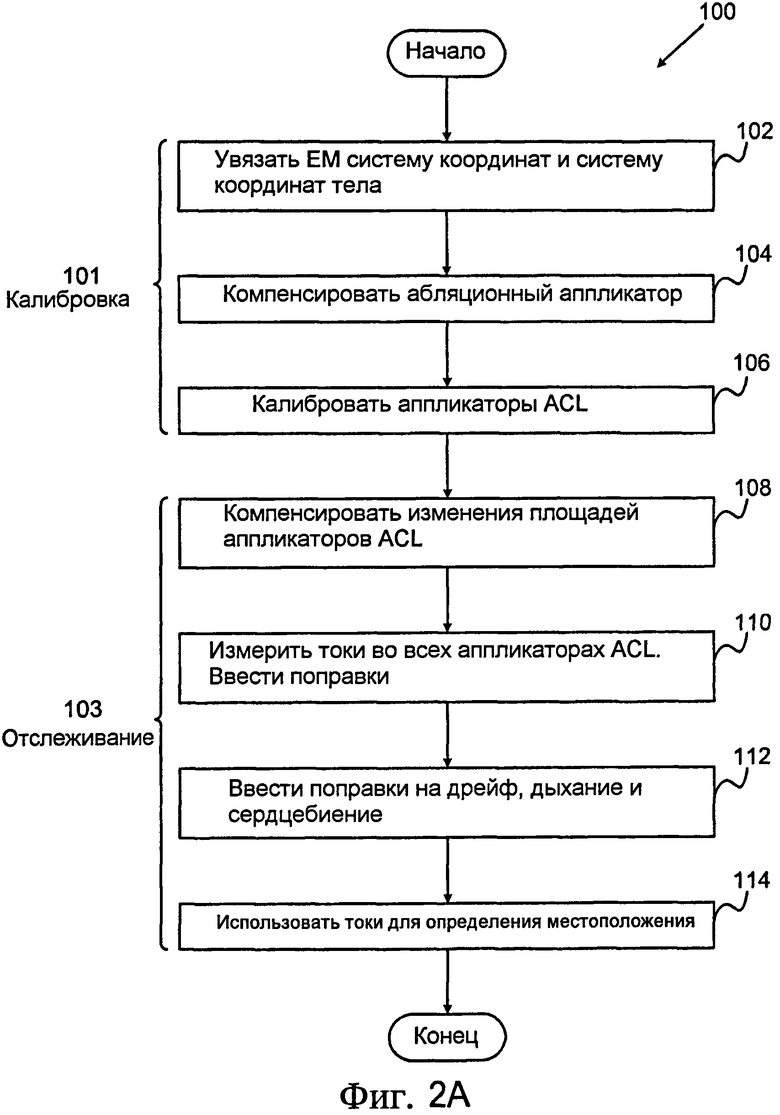
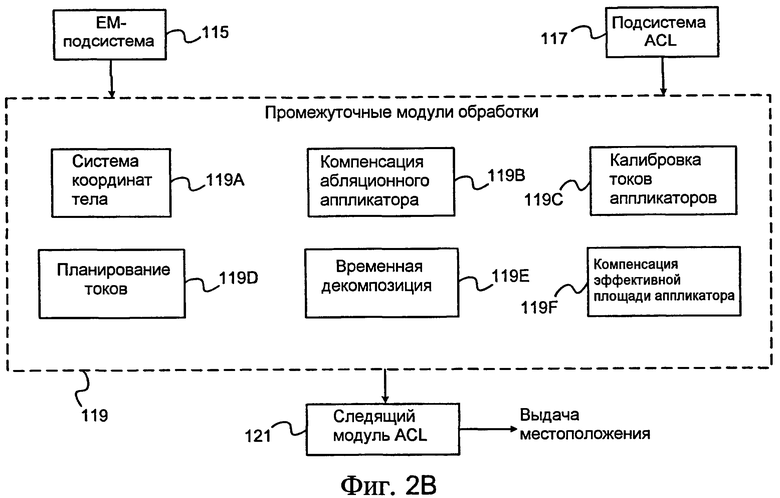
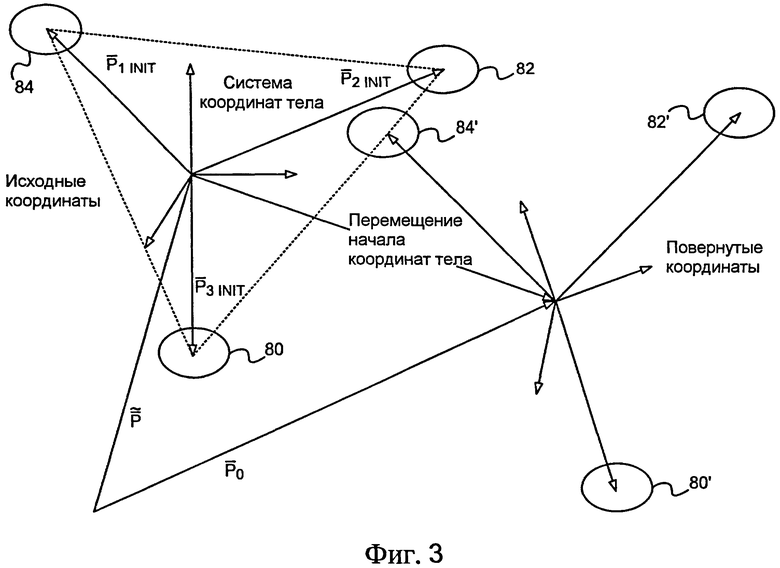
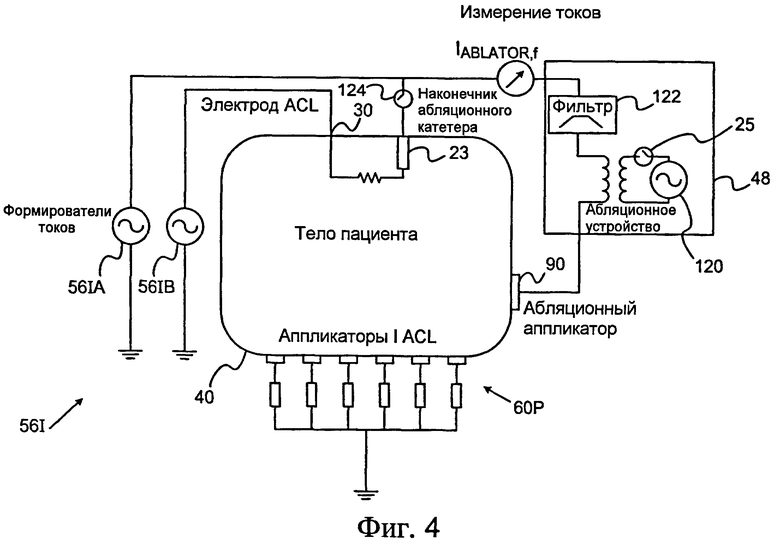
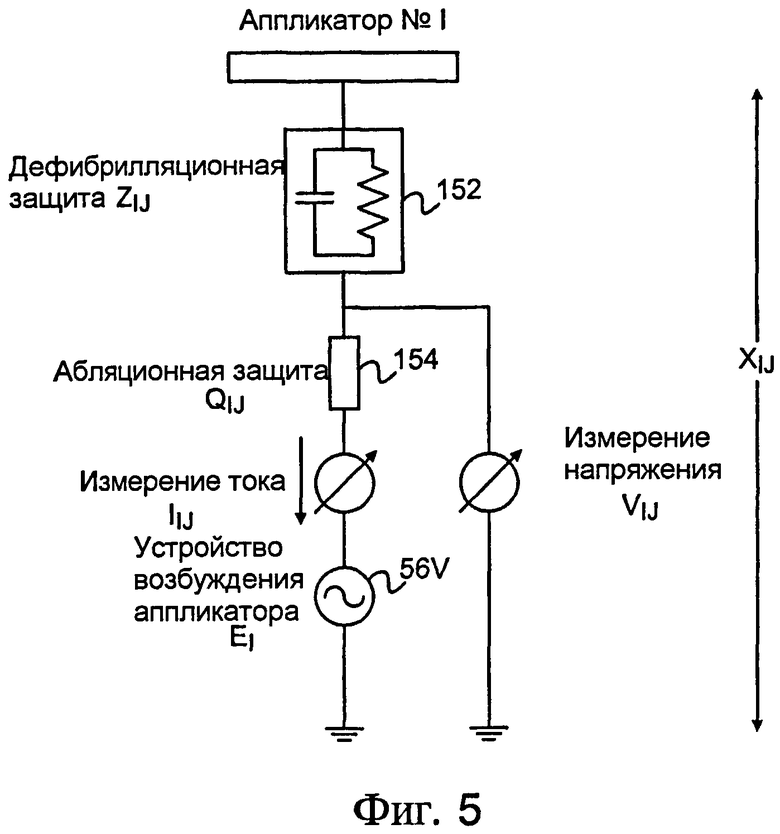
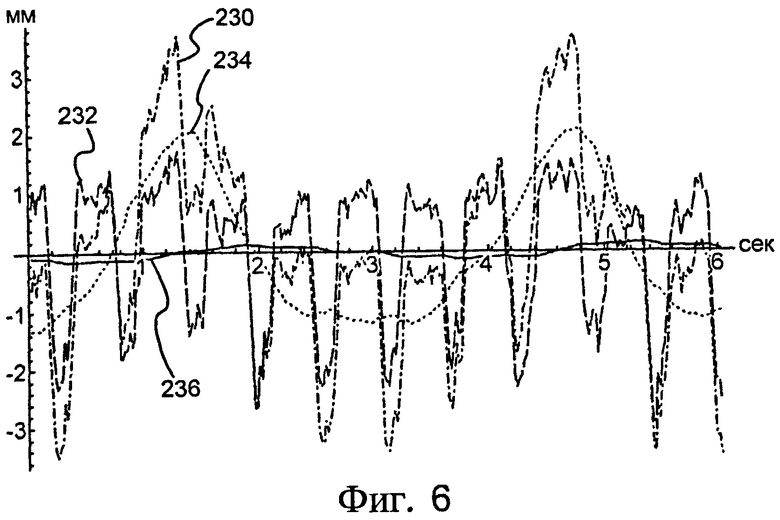
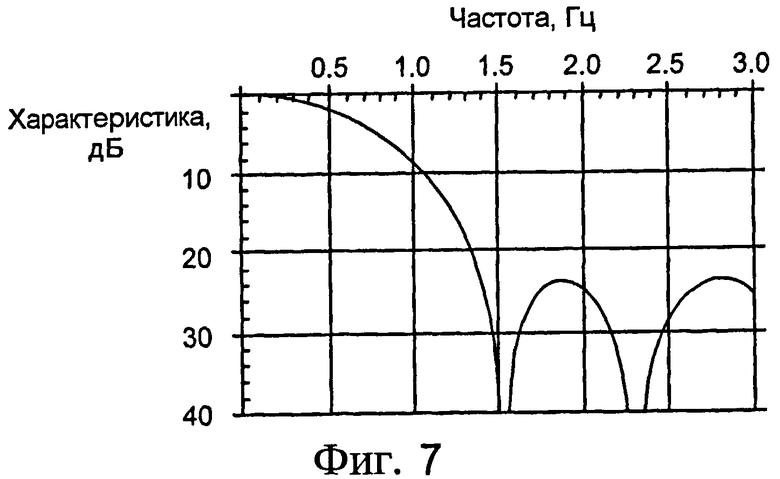
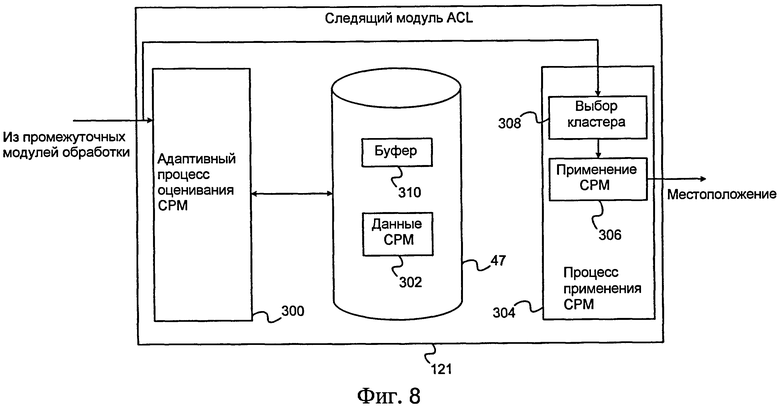
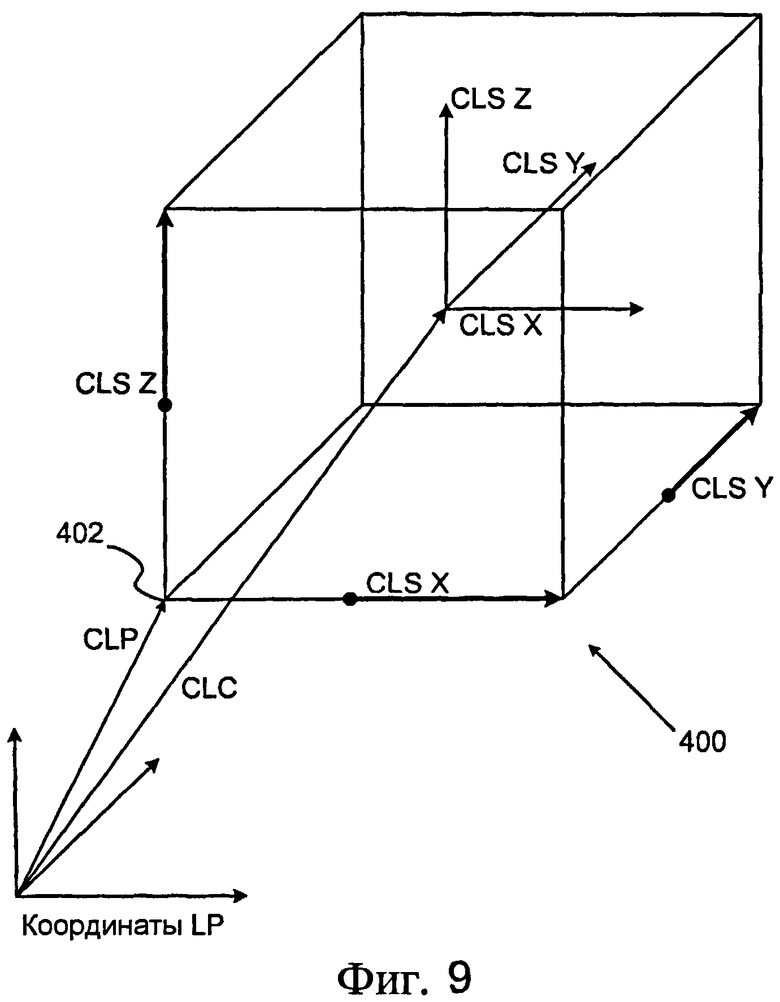
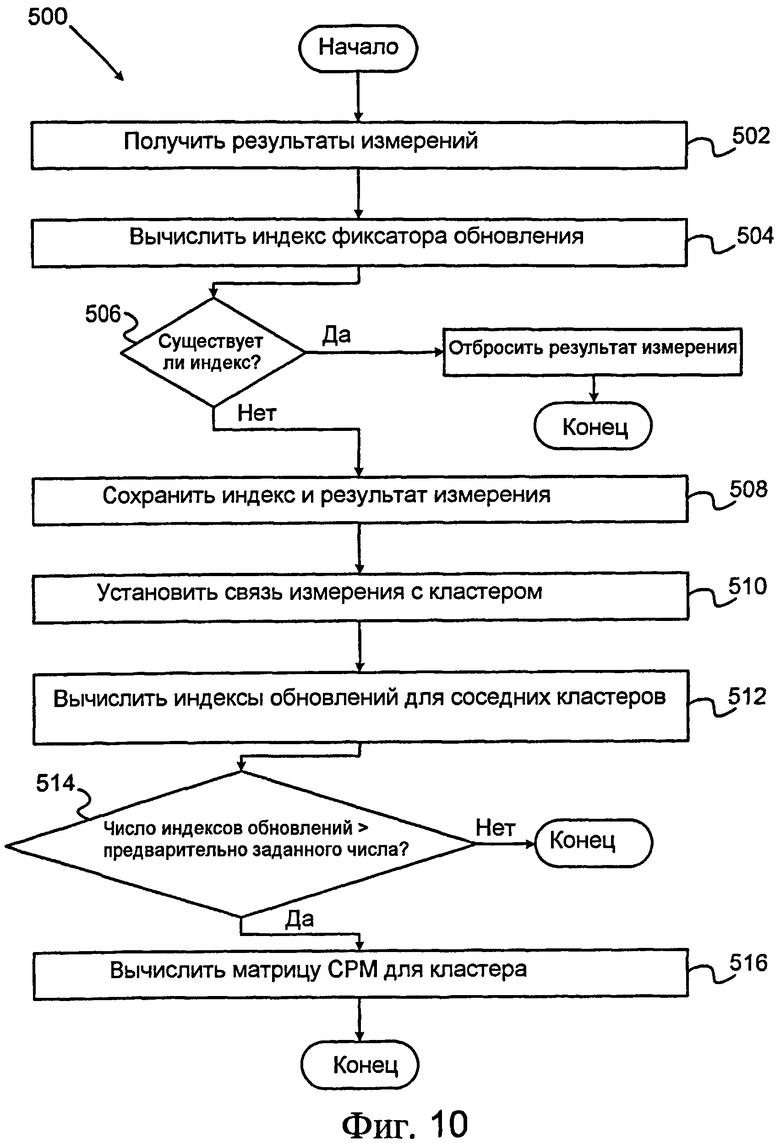
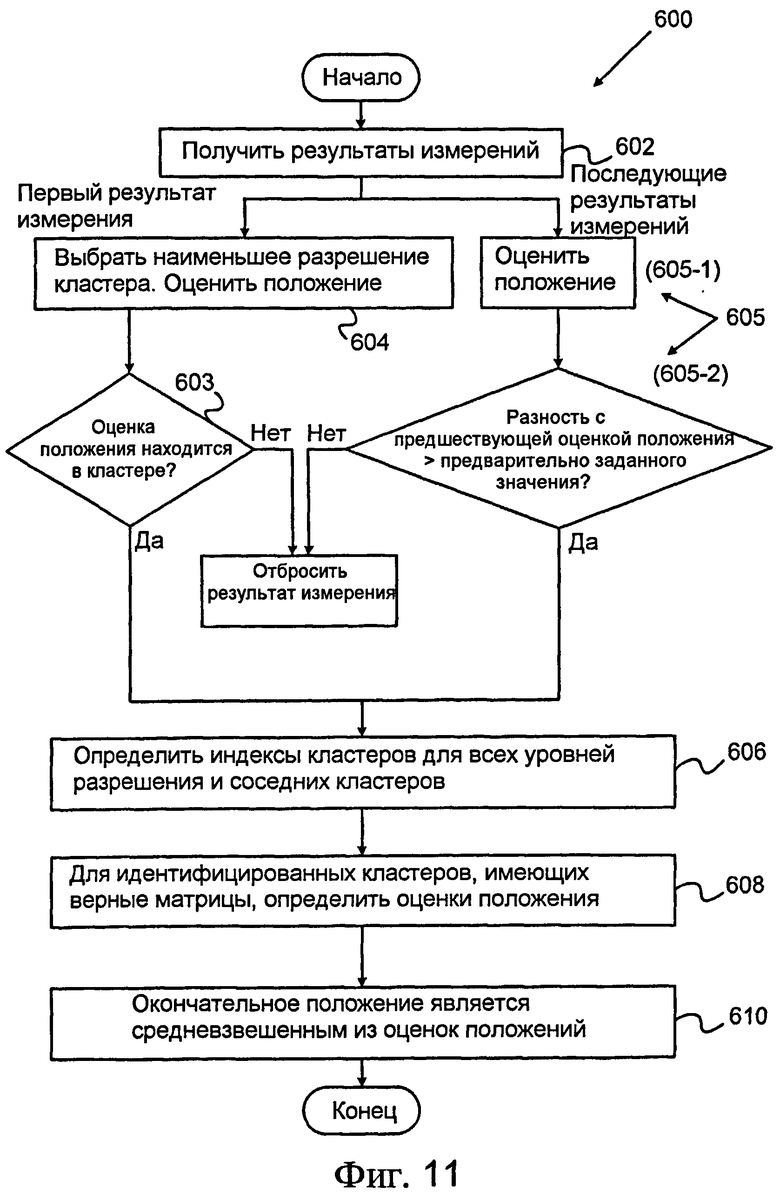
Изобретение относится к средствам определения положения объекта, введенного в живой организм. Способ отслеживания местоположения инструмента для исследования внутри тела пациента осуществляется устройством отслеживания и состоит в установке накладных электродов в гальваническом контакте с телом пациента, установке инструмента отображения, содержащего проводящий электрод инструмента отображения, во множестве областей в теле пациента, отслеживании инструмента отображения в разных положениях в каждой из областей, с использованием системы измерения местоположения, генерации для каждой области, соответствующей совокупности калибровочных токов между накладными электродами и проводящим электродом инструмента отображения в разных положениях, выведении посредством процессора для каждой области соответствующей зависимости между соответствующей совокупностью калибровочных токов и разными положениями, установке инструмента для исследования, содержащего проводящий электрод инструмента для исследования, в теле пациента, генерации токов между накладными электродами и проводящим электродом инструмента для исследования и определении местоположения с учетом соответствующих зависимостей и токов инструмента для исследования. Во втором варианте выполнения способа и устройства для каждой области генерируют соответствующие межэлектродные токи между накладными электродами и соответствующие токи инструмента для исследования между проводящим электродом инструмента для исследования и накладными электродами, при этом определяют соответствующий импеданс между каждым из накладных электродов и телом с учетом соответствующих межэлектродных токов и соответствующих токов инструмента для исследования, местоположение инструмента для исследования определяют на основе определенных импедансов. В третьем варианте выполнения способа и устройства подсоединяют инструмент для исследования, содержащий проводящий электрод инструмента для исследования, для генерирования токов в теле пациента в ответ на приложение напряжения возбуждения к проводящему электроду инструмента для исследования, устанавливают абляционный накладной электрод в гальваническом контакте с телом, устанавливают накладные поверхностные электроды в гальваническом контакте с телом, чтобы принимать соответствующие токи на поверхности тела от проводящего электрода инструмента для исследования, и определяют местоположение инструмента для исследования посредством процессора с учетом соответствующих токов на поверхности тела в то время, как компенсируют отклонение соответствующих токов на поверхности тела абляционным накладным электродом. Использование изобретения позволяет улучшить точность отслеживания местоположения объекта, расположенного внутри тела. 6 н. и 44 з.п. ф-лы, 11 ил.
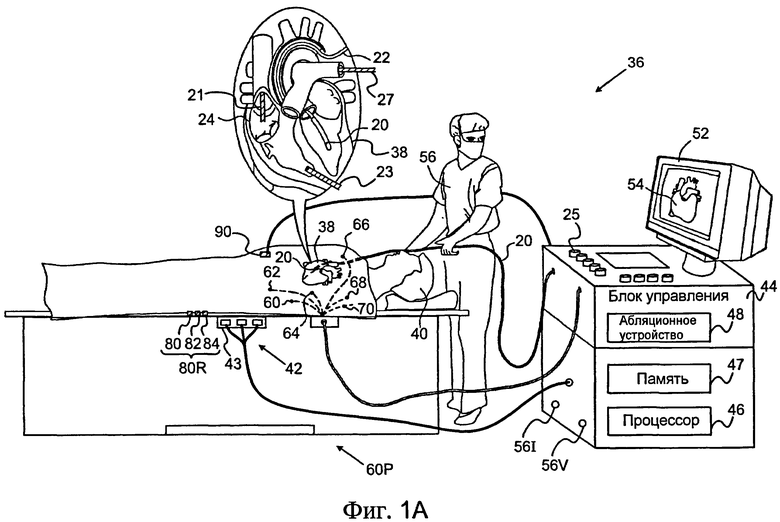
1. Способ отслеживания местоположения инструмента для исследования внутри тела пациента, содержащий этапы, на которых:
устанавливают накладные электроды в гальваническом контакте с телом пациента;
устанавливают инструмент отображения, содержащий проводящий электрод инструмента отображения, во множестве областей в теле пациента;
отслеживают инструмент отображения в разных положениях в каждой из областей с использованием системы измерения местоположения;
для каждой области генерируют соответствующую совокупность калибровочных токов между накладными электродами и проводящим электродом инструмента отображения в разных положениях в области;
выводят для каждой области соответствующую зависимость между соответствующей совокупностью калибровочных токов и разными положениями, в результате чего разные области обладают разными соответствующими зависимостями;
устанавливают инструмент для исследования, содержащий проводящий электрод инструмента для исследования, в местоположение в теле пациента и генерируют токи инструмента для исследования между накладными электродами и проводящим электродом инструмента для исследования в местоположении; и
определяют местоположение с учетом разных соответствующих зависимостей и токов инструмента для исследования.
2. Способ по п.1, в котором накладные электроды содержат опорные накладные электроды, содержащие опорные электромагнитные (ЕМ) датчики, при этом опорные накладные электроды задают ЕМ систему координат и систему координат тела, причем способ содержит этап сравнения калибровочных токов опорных накладных электродов с опорными сигналами из опорных ЕМ-датчиков для установления зависимости между ЕМ системой координат и системой координат тела.
3. Способ по п.1, дополнительно содержащий этап определения относительных импедансов между накладными электродами для компенсации изменения эффективных площадей между накладными электродами и телом.
4. Способ по п.1, дополнительно содержащий этап фильтрации калибровочных токов с учетом, по меньшей мере, чего-то одного из дыхания тела и движения органа в теле, чтобы генерировать фильтрованные калибровочные токи, и при этом этап вывода соответствующей зависимости содержит этап формирования зависимости с учетом фильтрованных калибровочных токов.
5. Способ по п.1, в котором этап вывода соответствующей зависимости содержит этап увязки объема, содержащего разные положения, с зависимостью, и при этом этап определения местоположения содержит этап проверки того, что местоположение находится внутри объема.
6. Способ по п.5, в котором соответствующая зависимость содержит первичную матрицу, и при этом способ содержит этап разбиения объема на частичные объемы и этап увязки соответствующих вторичных матриц с частичными объемами, причем каждая из соответствующих вторичных матриц связывает соответствующую подсовокупность разных положений с подсовокупностью калибровочных токов, и причем этап определения местоположения содержит этап выбора одной из вторичных матриц с учетом данной совокупности калибровочных токов.
7. Способ по п.6, в котором местоположение содержит средневзвешенное значение местоположений инструмента для исследования, определенное из первичной матрицы и, по меньшей мере, одной из вторичных матриц.
8. Способ по п.1, в котором этап вывода соответствующей зависимости содержит этап проверки того, что число разных положений превышает предварительно заданное число разных положений, до этапа вывода соответствующей зависимости.
9. Способ по п.1, в котором этап генерирования соответствующей совокупности калибровочных токов содержит этап определения, соответствует ли совокупность калибровочных токов последующей совокупности калибровочных токов, посредством формирования сравнения разных положений, связанных с совокупностью и последующей совокупностью.
10. Способ по п.9, дополнительно содержащий этап использования последующей совокупности при формировании зависимости, если сравнение недействительно, и этап отбрасывания последующей совокупности, если сравнение действительно.
11. Способ по п.1, в котором инструмент для исследования не отслеживается системой измерения местоположения.
12. Способ по п.1, дополнительно содержащий этапы, на которых:
устанавливают, одновременно с инструментом для исследования, дополнительный инструмент для исследования, содержащий дополнительный проводящий электрод инструмента для исследования, в дополнительном местоположении в теле пациента генерируют токи дополнительного инструмента для исследования между накладными электродами и дополнительным проводящим электродом инструмента для исследования; и
определяют дополнительное местоположение с учетом отличающихся соответствующих зависимостей и токов дополнительного инструмента для исследования.
13. Способ по п.1, в котором система измерения местоположения содержит, по меньшей мере, какую-то одну из электромагнитной (ЕМ) системы слежения, флуороскопической системы слежения, системы слежения на основе магнитно-резонансной визуализации (MRI) и ультразвуковой системы слежения.
14. Способ по п.1, в котором этап установки накладных электродов содержит этап установки, по меньшей мере, одного из накладных электродов на теле пациента.
15. Способ по п.1, в котором этап установки накладных электродов содержит этап установки, по меньшей мере, одного из накладных электродов в теле пациента.
16. Способ по п.1, в котором соответствующая зависимость содержит матрицу, устанавливающую зависимость между соответствующей совокупностью калибровочных токов и разными положениями.
17. Способ по п.1, дополнительно содержащий этапы, на которых:
устанавливают дополнительный инструмент отображения в контакте с подвижным органом тела; и
отслеживают дополнительный инструмент отображения с использованием системы измерения местоположения для генерирования положений дополнительного инструмента отображения;
и при этом этап определения местоположения содержит этап определения местоположения с учетом положений дополнительного инструмента отображения.
18. Устройство для отслеживания местоположения инструмента для исследования внутри тела пациента, содержащее:
инструмент для исследования, содержащий проводящий электрод инструмента для исследования, который подсоединяют для генерирования токов в теле пациента в ответ на приложение напряжения возбуждения к проводящему электроду инструмента для исследования;
абляционный накладной электрод, устанавливаемый в гальваническом контакте с телом и выполненный с возможностью передачи абляционного тока в тело;
накладные поверхностные электроды, устанавливаемые в гальваническом контакте с телом, которые принимают соответствующие токи на поверхности тела от проводящего электрода инструмента для исследования; и
процессор, определяющий местоположение инструмента для исследования с учетом соответствующих токов на поверхности тела, при одновременной компенсации отклонения соответствующих токов на поверхности тела абляционным накладным электродом.
19. Устройство по п.18, в котором процессор выполнен с возможностью обеспечивать упомянутую компенсацию отклонения посредством записи соответствующих токов на поверхности тела перед передачей абляционного тока и определения местоположения с использованием записанных соответствующих токов на поверхности тела.
20. Устройство по п.18, в котором процессор выполнен с возможностью обеспечивать упомянутую компенсацию отклонения посредством приложения напряжения возбуждения абляционного накладного электрода к абляционному накладному электроду и определения калибровочных токов в накладных поверхностных электродах, формируемых в ответ на напряжение возбуждения абляционного накладного электрода.
21. Устройство по п.20, дополнительно содержащее абляционное устройство, выполненное с возможностью генерирования абляционного тока, и при этом приложение напряжения возбуждения абляционного накладного электрода к абляционному накладному электроду содержит приложение напряжения возбуждения абляционного накладного электрода посредством абляционного устройства.
22. Устройство по п.20, дополнительно содержащее абляционный катетер, и при этом приложение напряжения возбуждения абляционного накладного электрода содержит приложение напряжения возбуждения абляционного накладного электрода, при одновременном отсоединении абляционного катетера от абляционного устройства.
23. Устройство по п.20, дополнительно содержащее абляционный катетер, и при этом приложение напряжения возбуждения абляционного накладного электрода содержит приложение напряжения возбуждения абляционного накладного электрода, при одновременном соединении абляционного катетера с абляционным устройством.
24. Способ отслеживания местоположения инструмента для исследования внутри тела пациента, содержащий этапы, на которых:
устанавливают накладные электроды в гальваническом контакте с телом пациента;
устанавливают инструмент для исследования, содержащий проводящий электрод инструмента для исследования, во множестве областей внутри тела;
для каждой области генерируют соответствующие межэлектродные токи между накладными электродами;
для каждой области, генерируют соответствующие токи инструмента для исследования между проводящим электродом инструмента для исследования и накладными электродами;
для каждой области определяют соответствующий импеданс между каждым из накладных электродов и телом с учетом соответствующих межэлектродных токов и соответствующих токов инструмента для исследования; и
определяют местоположение инструмента для исследования на основе определенных импедансов.
25. Способ по п.24, в котором этап генерирования соответствующих межэлектродных токов содержит этап настройки межэлектродных токов равными соответствующим переменным токам, имеющим разные соответствующие частоты.
26. Устройство для отслеживания местоположения инструмента для исследования внутри тела пациента, содержащее:
накладные электроды, устанавливаемые в гальваническом контакте с телом пациента;
инструмент отображения, содержащий проводящий электрод инструмента отображения и выполненный с возможностью установки во множестве областей в теле пациента;
систему измерения местоположения, выполненную с возможностью отслеживания инструмента отображения в разных положениях в каждой из областей;
инструмент для исследования, содержащий проводящий электрод инструмента для исследования и выполненный с возможностью установки в местоположение в теле пациента и генерирования токов инструмента для исследования между накладными электродами и проводящим электродом инструмента для исследования в местоположении; и
процессор, генерирующий для каждой области соответствующую совокупность калибровочных токов между накладными электродами и проводящим электродом инструмента отображения в разных положениях в области и выводящий для каждой области соответствующую зависимость между соответствующей совокупностью калибровочных токов и разными положениями, в результате чего разные области характеризуются разными соответствующими зависимостями, и при этом процессор выполнен с возможностью определения местоположения с учетом разных соответствующих зависимостей и токов инструмента для исследования.
27. Устройство по п.26, в котором накладные электроды содержат опорные накладные электроды, содержащие опорные электромагнитные (ЕМ) датчики, при этом опорные накладные электроды задают ЕМ систему координат и систему координат тела, и причем процессор выполнен с возможностью сравнения калибровочных токов опорных накладных электродов с опорными сигналами из опорных ЕМ-датчиков для установления зависимости между ЕМ системой координат и системой координат тела.
28. Устройство по п.26, в котором процессор выполнен с возможностью определения относительных импедансов между накладными электродами для компенсации изменений эффективных площадей между накладными электродами и телом.
29. Устройство по п.26, в котором процессор выполнен с возможностью фильтрации калибровочных токов с учетом, по меньшей мере, чего-то одного из дыхания тела и движения органа в теле, чтобы генерировать фильтрованные калибровочные токи, и при этом вывод соответствующей зависимости содержит формирование зависимости с учетом фильтрованных калибровочных токов.
30. Устройство по п.26, в котором процессор выполнен с возможностью обеспечивать упомянутый вывод соответствующей зависимости посредством увязки объема, содержащего разные положения, с зависимостью и определять местоположение посредством проверки того, что местоположение находится внутри объема.
31. Устройство по п.30, в котором соответствующая зависимость содержит первичную матрицу и при этом процессор выполнен с возможностью разбиения объема на частичные объемы и увязки соответствующих вторичных матриц с частичными объемами, причем каждая из соответствующих вторичных матриц связывает соответствующую подсовокупность разных положений с подсовокупностью калибровочных токов, и причем процессор выполнен с возможностью определять местоположение посредством выбора одной из вторичных матриц с учетом данной совокупности калибровочных токов.
32. Устройство по п.31, в котором местоположение, определяемое процессором, представляет собой средневзвешенное значение местоположений инструмента для исследования, определенное из первичной матрицы и, по меньшей мере, одной из вторичных матриц.
33. Устройство по п.26, в котором процессор выполнен с возможностью обеспечивать проверку того, что число разных положений превышает предварительно заданное число разных положений, до вывода соответствующей зависимости.
34. Устройство по п.26, в котором процессор выполнен с возможностью обеспечивать упомянутое генерирование соответствующей совокупности калибровочных токов посредством определения того, соответствует ли совокупность калибровочных токов последующей совокупности калибровочных токов, посредством формирования сравнения разных положений, связанных с совокупностью и последующей совокупностью.
35. Устройство по п.34, в котором процессор выполнен с возможностью использования последующей совокупности при формировании зависимости, если сравнение недействительно, и отбрасывания последующей совокупности, если сравнение действительно.
36. Устройство по п.26, в котором инструмент для исследования не отслеживается системой измерения местоположения.
37. Устройство по п.26, дополнительно содержащее:
дополнительный инструмент для исследования, содержащий дополнительный проводящий электрод инструмента для исследования, устанавливаемый одновременно с инструментом для исследования в дополнительном местоположении в теле пациента;
и при этом процессор выполнен с возможностью:
генерирования токов дополнительного инструмента для исследования между накладными электродами и дополнительным проводящим электродом инструмента для исследования; и
определения дополнительного местоположения с учетом отличающихся соответствующих зависимостей и токов дополнительного инструмента для исследования.
38. Устройство по п.26, в котором система измерения местоположения содержит, по меньшей мере, какую-то одну из электромагнитной (ЕМ) системы слежения, флуороскопической системы слежения, системы слежения на основе магнитно-резонансной визуализации (MRI) и ультразвуковой системы слежения.
39. Устройство по п.26, в котором, по меньшей мере, один из накладных электродов расположен на теле пациента.
40. Устройство по п.26, в котором, по меньшей мере, один из накладных электродов расположен в теле пациента.
41. Устройство по п.26, в котором процессор выполнен с возможностью выводить соответствующую зависимость в виде матрицы, устанавливающей зависимость между соответствующей совокупностью калибровочных токов и разными положениями.
42. Устройство по п.26, дополнительно содержащее:
дополнительный инструмент отображения, устанавливаемый в контакте с подвижным органом тела;
и при этом процессор выполнен с возможностью отслеживания дополнительного инструмента отображения с использованием системы измерения местоположения для генерирования положений дополнительного инструмента отображения и определения местоположения с учетом положений дополнительного инструмента отображения.
43. Способ отслеживания местоположения инструмента для исследования внутри тела пациента, содержащий этапы, на которых:
подсоединяют инструмент для исследования, содержащий проводящий электрод инструмента для исследования, для генерирования токов в теле пациента в ответ на приложение напряжения возбуждения к проводящему электроду инструмента для исследования;
устанавливают абляционный накладной электрод в гальваническом контакте с телом, чтобы передавать абляционный ток в тело;
устанавливают накладные поверхностные электроды в гальваническом контакте с телом, чтобы принимать соответствующие токи на поверхности тела от проводящего электрода инструмента для исследования; и
определяют местоположение инструмента для исследования с учетом соответствующих токов на поверхности тела в то время, как компенсируют отклонение соответствующих токов на поверхности тела абляционным накладным электродом.
44. Способ по п.43, в котором этап компенсации отклонения содержит этап записи соответствующих токов на поверхности тела перед передачей абляционного тока и этап определения местоположения с использованием записанных соответствующих токов на поверхности тела.
45. Способ по п.43, в котором этап компенсации отклонения содержит этап приложения напряжения возбуждения абляционного накладного электрода к абляционному накладному электроду и этап определения калибровочных токов в накладных поверхностных электродах, формируемых в ответ на напряжение возбуждения абляционного накладного электрода.
46. Способ по п.45, дополнительно содержащий этап конфигурирования абляционного устройства на генерирование абляционного тока, и при этом этап приложения напряжения возбуждения абляционного накладного электрода к абляционному накладному электроду содержит этап приложения напряжения возбуждения абляционного накладного электрода посредством абляционного устройства.
47. Способ по п.45, дополнительно содержащий этап обеспечения абляционного катетера, и при этом этап приложения напряжения возбуждения абляционного накладного электрода содержит этап приложения напряжения возбуждения абляционного накладного электрода, при одновременном отсоединении абляционного катетера от абляционного устройства.
48. Способ по п.45, дополнительно содержащий этап обеспечения абляционного катетера, и при этом этап приложения напряжения возбуждения абляционного накладного электрода содержит этап приложения напряжения возбуждения абляционного накладного электрода, при одновременном соединении абляционного катетера с абляционным устройством.
49. Устройство для отслеживания местоположения инструмента для исследования внутри тела пациента, содержащее:
накладные электроды, устанавливаемые в гальваническом контакте с телом пациента;
инструмент для исследования, содержащий проводящий электрод инструмента для исследования, выполненный с возможностью установки во множестве областей внутри тела; и
процессор, который выполнен с возможностью, для каждой области:
генерирования соответствующих межэлектродных токов между накладными электродами,
генерирования соответствующих токов инструмента для исследования между проводящим электродом инструмента для исследования и накладными электродами,
определения соответствующего импеданса между каждым из накладных электродов и телом с учетом соответствующих межэлектродных токов и соответствующих токов инструмента для исследования и
определения местоположения инструмента для исследования на основе определенных импедансов.
50. Устройство по п.49, в котором процессор выполнен с возможностью обеспечивать упомянутое генерирование соответствующих межэлектродных токов посредством настройки межэлектродных токов равными соответствующим переменным токам, имеющим разные соответствующие частоты.
| US 2007016007 A1, 18.01.2007 | |||
| US 5983126 A, 09.11.1999 | |||
| US 6574498 B1, 06.03.2003 | |||
| Способ производства древесностружечных плит | 1984 |
|
SU1184684A1 |
| Соковыжималка | 1990 |
|
SU1743575A1 |
| ДЕПОЛЯРИЗОВАННЫЙ ЭЛЕКТРОДНЫЙ УЗЕЛ | 1992 |
|
RU2076627C1 |
| Трепальная машина для лубовых растений | 1927 |
|
SU12650A1 |

