ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
По настоящей заявке испрашивается приоритет по предварительной заявке на патент США 61/113722, поданной 12 ноября 2008 г., которая включена в настоящее описание посредством ссылки.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Область техники, к которой относится изобретение
Настоящее изобретение относится к считыванию электрических сигналов в теле живого существа. В частности, настоящее изобретение относится к считыванию электрических сигналов при одновременном отслеживании объекта в теле с использованием измерений импедансов.
Описание предшествующего уровня техники
Множество медицинских процедур включает в себя размещение объектов, таких как датчики, трубки, катетеры, дозирующие приспособления и имплантаты внутри тела. Для отслеживания данных объектов разработаны системы считывания положения. Например, в патенте США № 5983126, выданном Витткампфу (Wittkampf), раскрытие которого включено в настоящее описание посредством ссылки, предложена система, в которой положение катетера обнаруживают с использованием способов электрических импедансов. В опубликованных заявках на патенты США 2006/0173251, поданной Говари с соавторами (Govari et al.), и 2007/0038078, поданной Осадчим (Osadchy), которые включены в настоящее описание посредством ссылки, предложены способы на основе импедансов для считывания положения зонда посредством пропускания электрических токов через тело между электродом на зонде и множеством мест на поверхности тела.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Измерения положения на основе импедансов обычно выполняют в предположении некоторой идеальной модели протекания тока и импеданса между элементами системы считывания положения. Однако, на практике, на измерения негативно влияют неидеальные условия, например, изменяющиеся импеданс и утечка тока через другие проводящие компоненты, которые подсоединены к телу пациента. Варианты осуществления настоящего изобретения, как поясняется в дальнейшем, обеспечивают способы и системы калибровки и компенсации с учетом реальных неидеальных условий измерений, в которых должна фактически работать система считывания положения.
Вариант осуществления изобретения обеспечивает способ считывания положения зонда в теле, содержащий этапы, на которых: устанавливают зонд в теле; устанавливают, по меньшей мере, один электрод (32) на внешней поверхности зонда и множество контактных накладных электродов (30) на поверхности тела; производят измерения картирующих электрических токов, протекающих между, по меньшей мере, одним электродом (32) на внешней поверхности зонда и множеством контактных накладных электродов (30) на поверхности тела посредством измерительных схем контактных накладных электродов; калибруют измерения посредством компенсации токов утечки, протекающих по пути, продолжающемся от электрода (32) на внешней поверхности зонда через, по меньшей мере, аблятор и контактный накладной электрод (56) аблятора к множеству контактных накладных электродов (30); и вычисляют положение зонда в теле на основании картирующих электрических токов с использованием калиброванных измерений.
В соответствии с аспектом способа, этап калибровки измерений содержит этап вычисления перекрестных помех, вызываемых генератором картирования.
В соответствии с одним аспектом способа, этап компенсации выполняют до установки зонда в тело и содержит этапы, на которых: обеспечивают соответствующие измерительные схемы контактных накладных электродов для определения соответствующих долей картирующих электрических токов, проходящих через контактные накладные электроды (30); электрически шунтируют измерительные схемы контактных накладных электродов, используя переключатель; и затем определяют соответствующие сигналы перекрестных помех, имеющих место на контактных накладных электродах (30), с использованием измерительных схем контактных накладных электродов.
В соответствии с другим аспектом способа, этап определения соответствующих сигналов перекрестных помех содержит этап определения, для каждого из контактных накладных электродов (30) фаз между токами и напряжениями, возникающими в них, при этом токи и напряжения вводятся из передатчиков, соединенных, соответственно, с, по меньшей мере, одним электродом (32) на внешней поверхности зонда.
В соответствии с дополнительным аспектом способа аблятор содержит контактный накладной электрод (56) аблятора на поверхности тела, при этом этап калибровки измерений содержит этап измерения тока утечки, протекающего по пути, продолжающемся от, по меньшей мере, одного первого электрода через аблятор и третий электрод ко вторым электродам на поверхности тела, а не напрямую от, по меньшей мере, одного первого электрода ко вторым электродам, как требуется, и при этом этап вычисления положения выполняют в то время, когда аблятор подсоединен к телу.
В соответствии с одним аспектом способа, этап калибровки измерений содержит также этап присоединения вторых электродов к соответствующим контактным накладным приемникам и контактным накладным генераторам и этап применения контактных накладных приемников и контактных накладных генераторов для определения матрицы проводимости между вторыми электродами двух аппликаторов.
В соответствии с дополнительным аспектом изобретения, способ содержит этапы, заключающиеся в том, что отсоединяют аблятор от зонда, определяют ток утечки аблятора, протекающий от генератора одного из картирующих электрических токов через аблятор и третий электрод и определяют соответствующие составляющие тока утечки аблятора на вторых электродах и вычисляют отношения между составляющими и током утечки аблятора, соответственно.
В соответствии с дополнительным аспектом, способ содержит этап применения матрицы проводимости между двумя аппликаторами, чтобы выполнять частотную коррекцию токов, измеряемых контактными накладными приемниками.
В соответствии с дополнительным аспектом, способ содержит вычисление соответствующих токов утечки после установки зонда в тело и содержит определение отношения между каждым из картирующих электрических токов и суммой картирующих электрических токов, протекающих через вторые электроды, причем определение отношения выполняют на соответствующих рабочих частотах картирующих электрических токов во вторых электродах и дополнительно выполняют экстраполяцию от участка рабочих частот на другие рабочие частоты.
Другие варианты осуществления изобретения обеспечивают устройство для выполнения вышеописанного способа.
КРАТКОЕ ОПИСАНИЕ НЕСКОЛЬКИХ ВИДОВ НА ЧЕРТЕЖАХ
Для более глубокого понимания настоящего изобретения далее представлено, на примерах, подробное описание изобретения, которое следует изучать в связи с нижеприведенными чертежами, на которых одинаковые элементы снабжены одинаковыми ссылочными позициями, и где:
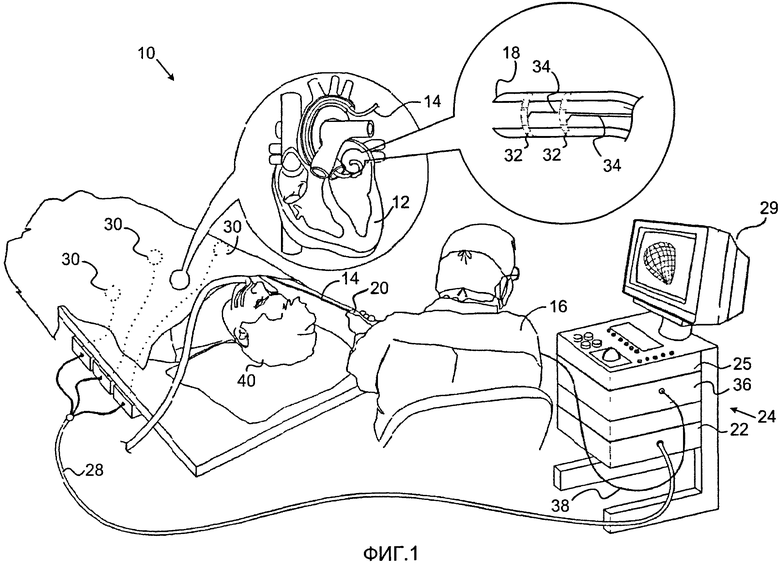
Фиг.1 - схематичное изображение системы обнаружения зон аномальной электрической активности и выполнения абляционных процедур на сердце живого субъекта, которая имеет конструкцию и действует в соответствии с описанным вариантом осуществления изобретения;
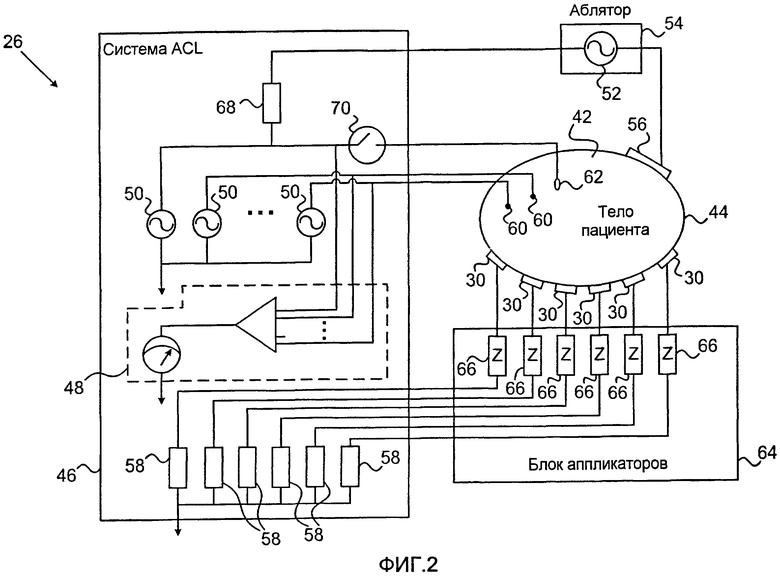
Фиг.2 - схематичное изображение подсистемы определения положения на основе импедансов, относящейся к системе, показанной на фиг.1, которая имеет конструкцию и действует в соответствии с описанным вариантом осуществления изобретения;
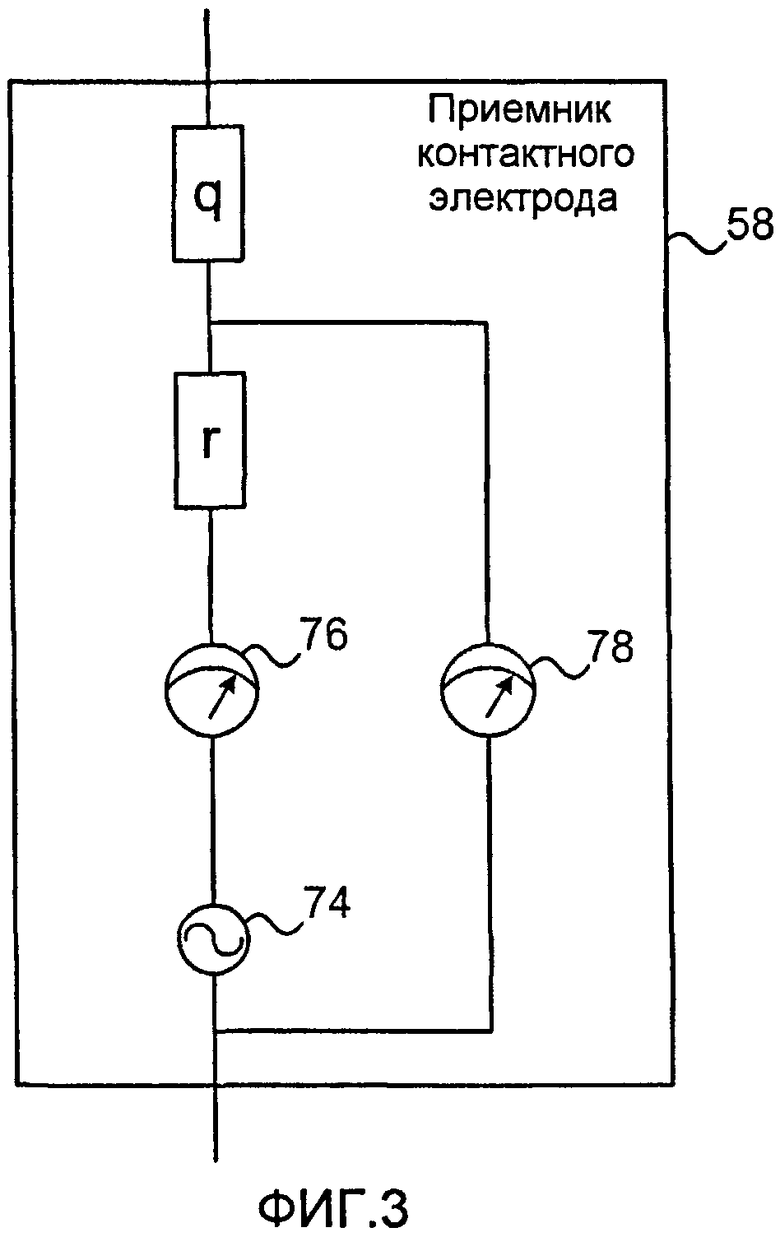
Фиг.3 - принципиальная электрическая схема приемника контактного электрода подсистемы, показанной на фиг.2, который имеет конструкцию и действует в соответствии с описанным вариантом осуществления изобретения;
Фиг.4 - принципиальная электрическая схема фильтра аблятора подсистемы, показанной на фиг.2, который имеет конструкцию и действует в соответствии с описанным вариантом осуществления изобретения; и
Фиг.5 - схематичное изображение подсистемы определения положения, показанной на фиг.2, которая выполнена с возможностью калибровки на перекрестные помехи, в соответствии с описанным вариантом осуществления изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В нижеследующем описании поясняются многие конкретные детали, чтобы обеспечить исчерпывающее объяснение различных принципов настоящего изобретения. Однако специалисту в данной области техники будет очевидно, что не все упомянутые детали всегда необходимы для практического применения настоящего изобретения. В настоящем примере, общеизвестные схемы, управляющие логические схемы и детали команд компьютерных программ для обычных алгоритмов и способов обработки не описаны подробно, чтобы не затруднять понимание общих принципов.
Конструкция системы
Далее следует обратиться к чертежам и, сначала, к фиг.1, где схематично изображена система 10 для обнаружения зон аномальной электрической активности и выполнения абляционных процедур на сердце 12 живого субъекта 40, в соответствии с описанным вариантом осуществления изобретения. Зонд или катетер 14, содержащий наконечник 18, является компонентом системы 10 и подкожно вводится оперирующим хирургом 16 через сосудистую систему пациента в камеру или сосудистую структуру сердца. Оперирующий хирург 16 приводит дистальный участок катетера 14 в контакт с сердечной стенкой в намеченном месте, которое надлежит оценивать. Затем составляют карты электрического возбуждения в соответствии со способами, описанными в вышеупомянутых патентах США №№ 6226542 и 6301496 и патенте США № 6892091, принадлежащем владельцу настоящей заявки, раскрытия которых включены в настоящее описание посредством ссылки.
Электрические сигналы могут передаваться от сердца 12 через, по меньшей мере, один электрод 32, расположенный на или вблизи дистального наконечника 18 катетера 14, и по проводам 34 в пульт 24. Сигналы кардиостимуляции и другие управляющие сигналы могут передаваться с пульта 24 по проводам 34 и через электроды 32 к сердцу 12. Электроды 32 действуют также как компоненты системы определения положения на основе импедансов для определения местоположения катетера, что описано ниже. Проводные соединения 28 связывают пульт 24 с контактными накладными электродами 30.
Кроме того, зоны, определяемые как аномальные путем оценки карт электрического возбуждения, можно удалять абляцией посредством приложения тепловой энергии, например, посредством пропускания высокочастотного электрического тока по проводам 34 в катетере к электродам 32, которые подводят высокочастотную энергию в миокард. Энергия поглощается в ткани и, тем самым, нагревает ее до температуры (обычно около 50°C), при которой ткань навсегда теряет свою электрическую возбудимость. При успешном проведении, упомянутая процедура создает непроводящие поражения в сердечной ткани, которые разрывают аномальный электрический путь, вызывающий аритмию. Принципы изобретения можно применять к разным камерам сердца, к картированию на фоне синусового ритма, и когда наблюдаются много разных аритмий сердца.
Катетер 14 обычно содержит ручку 20, содержащую подходящие элементы управления для предоставления оперирующему хирургу 16 возможности управлять, устанавливать и ориентировать дистальный конец катетера, как требуется для абляции. Процессор 22 для определения положения вычисляет координаты местоположения и ориентации катетера 14.
Пульт 24 содержит генератор 25, выход которого подсоединен к, по меньшей мере, одному электроду 32 на внешней поверхности катетера 14 проводами 34. Электроды 32 имеют, по меньшей мере, двойное назначение, применяются для передачи первых электрических сигналов к сердцу 12 через тело субъекта 40 к контактным накладным электродам 30, которые должны, в конечном счете, оцениваться процессором 22 для определения положения. В некоторых вариантах осуществления оперирующий хирург 16 может вызывать вторые электрические сигналы, содержащие высокочастотную энергию абляции, которые должны пропускаться к электродам 32 из генератора 36 мощности абляции, который может содержаться в пульте 24. Данные методы описаны в патенте США № 6814733, принадлежащем владельцу настоящей заявки, который включен в настоящее описание посредством ссылки.
Как отмечено выше, катетер 14 связан с пультом 24, который дает оперирующему хирургу 16 возможность наблюдать и регулировать функции катетера 14. В предпочтительном варианте, процессор 22 для определения положения является компьютером с соответствующими схемами обработки сигналов. Процессор подсоединен с возможностью управления экранным монитором 29. Схемы обработки сигналов, обычно содержащие электрокардиографическое устройство 38, принимают, усиливают, фильтруют и оцифровывают сигналы из катетера 14, включая сигналы, передаваемые через электроды 32. Оцифрованные сигналы принимаются и анализируются в пульте 24 для получения электрической информации, представляющей медицинский интерес. Информацию, получаемую в результате данного анализа, используют для формирования электрофизиологической карты, по меньшей мере, участка сердца 12 или связанных структур, например, устья легочной вены. Карту можно применять в целях диагностики, например, для определения местоположения аритмогенной зоны в сердце или для облегчения лечебной абляции.
С пульта 24, через провода 34 и электроды 32 передаются другие сигналы, используемые процессором 22 для определения положения, чтобы вычислять положение и ориентацию катетера 14.
Электрокардиографическое устройство 38 может подавать сигнал синхронизации с ЭКГ в пульт 24, который может отображаться на экранном мониторе 29 или на отдельном дисплее (не показанном). Система 10 обычно также содержит опорный позиционный датчик, либо на наложенном с внешней стороны опорном электроде, закрепленном на внешней поверхности тела субъекта, либо на другом расположенном с внутренней стороны опорном катетере (не показанном), который введен в сердце 12 и удерживается в фиксированном положении относительно сердца 12. Путем сравнения положения катетера 14 с положением опорного катетера, координаты катетера 14 относительно сердца 12 определяются точно, независимо от движения сердца. В альтернативном варианте, для компенсации движения сердца можно применить любой другой подходящий способ.
Далее на фиг.2 схематично представлена система 26 определения положения на основе импедансов, которая является компонентом системы 10 (фиг.1) и показана присоединенной к телу 42 пациента, в соответствии с описанным вариантом осуществления изобретения. Настоящая компоновка аналогична компоновке, описанной в вышеупомянутых публикациях Осадчего и Говари, модифицированной для работы в соответствии с принципами настоящего изобретения. Ниже приведено краткое описание для удобства представления.
Множество контактных накладных электродов 30, которые могут быть адгезивными накожными аппликаторами, присоединены к поверхности 44 тела (например, коже) субъекта. Контактные накладные электроды 30 иногда упоминаются в настоящем описании как «аппликаторы». При применении в кардиологии, контактные накладные электроды 30 обычно распределяют так, чтобы окружать сердце, три на груди субъекта и три на спине. Однако число контактных накладных электродов 30 не критично, и их можно располагать в удобных местоположениях на поверхности 44 тела, как правило, вблизи места проведения медицинской процедуры.
Блок 46 управления, обычно находящийся в пульте 24 (фиг.1), содержит токоизмерительные схемы 48 и, по меньшей мере, один передатчик 50 катетерного электрода для проведения тока через, по меньшей мере, один электрод 32 к, по меньшей мере, одному контактному накладному электроду 30 на соответствующих рабочих частотах. Блок 46 управления связан с процессором 22 для определения положения (фиг.1). Блок 46 управления связан с аблятором 54, который содержит, по меньшей мере, один абляционный генератор 52. Токи через контактные накладные электроды 30 и контактный накладной электрод 56 аблятора протекают в схему с абляционным генератором 52 и измеряются соответствующими токоизмерительными схемами, которые находятся в приемниках 58 контактных электродов, иногда называемых в настоящем описании «измерительными схемами аппликаторов». Приемники 58 контактных электродов обычно встроены в блок 46 управления. В альтернативном варианте, упомянутые приемники могут быть закреплены на контактных накладных электродах 30. Катетерные электроды показаны на фиг.2 в виде измерительных электродов 60 (обозначенных кружками) и электрода 62 двойного назначения (обозначенного эллипсом). Электрод 62 двойного назначения выполняет функцию абляционного электрода, а также служит как один из измерительных электродов.
Контактные накладные электроды 30 соединены с приемниками 58 контактных электродов через блок 64 аппликаторов, который защищает систему от токов абляции и дефибрилляции. Обычно система выполнена с шестью приемниками 58 контактных электродов. Паразитные импедансы 66 (Z) блока аппликаторов измеряются при изготовлении и потому известны a priori. Данные импедансы поясняются ниже.
Обычно, хотя для удобства показаны только два измерительных электрода 60, для импедансных измерений применяют около 80 измерительных электродов. Обычно имеется один или два абляционных электрода. Координаты катетера внутри тела определяются в системе 26 определения положения путем пропускания токов между электродами на катетере и контактными накладными электродами 30.
Блок 46 управления может также управлять схемой абляции, содержащей аблятор 54 и электрод 62 двойного назначения. Аблятор 54 обычно расположен внешне относительно блока 46 управления и содержит абляционный генератор 52. Он соединен с контактным накладным электродом 56 аблятора и фильтром 68 аблятора, который, в данном примере, показан внутри блока 46 управления. Однако такое местоположение не обязательно. Переключатель 70 настраивает схему аблятора на разные режимы работы, как описано ниже. Для определения выходного сигнала передатчиков 50 катетерных электродов обеспечена схема 72 измерения напряжения. Как видно из фиг.2, схема аблятора соединена с одним из передатчиков 50 катетерных электродов. Важность данного соединения поясняется ниже в разделе «Фаза обучения при утечке во время абляции».
Далее на фиг.3 представлена принципиальная схема примерного приемника 58 контактного электрода (фиг.2), который имеет конструкцию и действует в соответствии с описанным вариантом осуществления изобретения. Теоретически, импеданс между контактными накладными электродами 30 и землей должен быть равен нулю. На практике, данный импеданс не равен нулю и, следовательно, влияет на распределение тока между контактными накладными электродами 30. Эффект зависит от частоты и, по существу, сказывается на каждом электроде по-разному. Как поясняется ниже, во время калибровки токи соответствующих частот протекают через контактные накладные электроды 30. Это делает невозможным прогнозирование местоположения одного электрода на основании картирования, выполненного другим электродом. Другой эффект, который предпочтительно следует компенсировать, заключается в утечке тока позиционирования, формируемого передатчиками 50 катетерных электродов (фиг.2), через абляционный генератор 52 и контактный накладной электрод 56 аблятора на контактные накладные электроды 30. Целью процедур калибровки и компенсации является оценка тока, который протекал бы, если бы входные импедансы контактных накладных электродов 30 были равны нулю, и отсутствовал аблятор 54 (фиг.2).
Далее, следует отметить, что приемник 58 контактного электрода содержит генератор 74 контактного накладного электрода, токоизмерительное приспособление 76 и приспособление 78 для измерения напряжения. Генератору 74 контактного накладного электрода в разных вариантах приемника 58 контактного электрода можно назначать соответствующие частоты. В альтернативном варианте, генератору 74 контактного накладного электрода можно назначить одинаковую частоту во всех вариантах приемника 58 контактного электрода, и их можно мультиплексировать с временным разделением.
Количественные параметры, описанные со ссылкой на фиг.3, имеют следующие обозначения:
i - индекс контактного накладного электрода.
j - индекс частоты. Данный индекс обозначает частоту f j, которая передается через контактный накладной электрод j.
z ij - a priori (априорный) известный импеданс блока 64 аппликаторов (фиг.2). Данный количественный параметр может фиксироваться во время изготовления или определяться в ходе процедуры в процессе эксплуатации. В любом случае, данный количественный параметр считают стабильным.
q ij - a priori известный импеданс компонента передающего тракта через контактный накладной электрод, который не включен в измерение напряжения.
r ij - a priori известный импеданс компонента передающего тракта через контактный накладной электрод, который включен в измерение напряжения.
E i - источник (неизвестный) напряжения, который возбуждает контактный накладной электрод i частотой f i.
I ij - ток, измеряемый на контактном накладном электроде i при частоте f i.
V ij - напряжение, измеряемое на контактном накладном электроде i при частоте f i.
Дополнительными количественными параметрами, не показанными на фиг.3, являются:
Cv ij - a priori известные постоянные калибровки по напряжению и
Ci ij - a priori известные постоянные калибровки по току.
Количественные параметры q ij и r ij именуются также «паразитными импедансами контактных накладных приемников».
Далее на фиг.4 представлена принципиальная электрическая схема фильтра 68 аблятора (фиг.2), где показан узкополосный режекторный фильтр 80 и токоизмерительный элемент 82. При нормальной работе, узкополосный режекторный фильтр 80, в основном, не допускает утечку тока, передаваемого через измерительные электроды 60 (фиг.2), через аблятор 54 и контактный накладной электрод 56 аблятора. Токоизмерительный элемент 82 измеряет остаточный ток утечки через аблятор 54. Данное измерение применяется для компенсации утечки через аблятор во время нормальной работы.
Калибровка на перекрестные помехи
Далее на фиг.5 представлена принципиальная электрическая схема системы 26 определения положения (фиг.2), которая предназначена для калибровки на перекрестные помехи, в соответствии с описанным вариантом осуществления изобретения. Приемники 58 контактных электродов соединены со схемой из сопротивлений 84, которые приблизительно моделируют импеданс тела. Каждое из сопротивлений 84 имеет значение около 10 Ом. Резистивная схема заменяет соединения с контактными накладными электродами 30 при нормальной работе, которая отражена на фиг.2.
Калибровку на перекрестные помехи обычно выполняют один раз, либо по окончании изготовления, либо во время первоначальной установки в условиях эксплуатации. В процессе калибровки на перекрестные помехи, аблятор 54 (фиг.2) опущен. Переключатель 70 замкнут. Все передатчики 50 катетерных электродов включены, и их выходы заземлены. Напряжения передатчиков 50 катетерных электродов измеряют одновременно. Отношения между измеренным током перекрестных помех и напряжениями передатчиков вычисляют как:
 ,
,
где:
I ij - ток, измеренный на аппликаторе i, от электрода j (на частоте f i).
V j - напряжение, измеренное на передатчике электрода j (на частоте f i).
Для выполнения компенсации перекрестных помех сохраняются следующие калибровочные данные:
X ij ≡Abs(I ij ) - абсолютная величина перекрестных помех на аппликаторе i от электрода j (на частоте f j).
 - разность фаз между током на аппликаторе i от электрода j и напряжением на электроде j.
- разность фаз между током на аппликаторе i от электрода j и напряжением на электроде j.
Фаза обучения
Здесь также даются ссылки на фиг.2. Калибровки, которые описаны ниже, могут выполняться системными программами, находящимися в памяти процессора 22 для определения положения (фиг.1). В дополнительном или альтернативном варианте, вычисления могут выполняться с использованием аппаратных реализаций в процессоре 22 для определения положения.
Во время нормальной работы, напряжения передатчиков и фазовые соотношения между напряжениями и суммарным выходным током являются стабильными. Следовательно, обучение можно выполнять нечасто. В альтернативном варианте, путем обучения системы перед операциями на пациенте, оперирующий хирург может обеспечивать более высокую степень достоверности в отношении точности компенсации перекрестных помех.
Как также показано на фиг.1, во время фазы обучения при калибровке, по меньшей мере, один из электродов 32 должен находиться в объеме картирования, т.е. внутри камеры сердца 12. Система 26 для определения положения пропускает ток через данный электрод, и система работает в первом режиме, при этом напряжение передатчика измеряют вместе с получаемыми в результате токами аппликаторов. Второй (нормальный) режим работы, который предусматривает измерения токов утечки аблятора, описан ниже.
Во время фазы обучения переключатель 70 (фиг.2) замкнут. Фаза обучения почти не зависит от частоты. Следовательно, обучение необходимо выполнять по отношению только к одному из измерительных электродов 60.
Отношение между напряжением передатчика и суммой токов аппликаторов усредняется за 5 секунд. Затем вычисляют разность фаз между напряжением передатчика и суммарным током (сумма токов аппликаторов):
 ,
,
где:
e - передающий электрод.
V e - измеренное напряжение передатчика.
 - Ток, измеренный на аппликаторе i, от передающего электрода.
- Ток, измеренный на аппликаторе i, от передающего электрода.
Использование этих измерений описано ниже.
Работа в онлайновом режиме
Во время нормальной работы системы, ток перекрестных помех вычисляют для каждого передающего электрода по следующей формуле:
 ,
,
где:
X
ij,  - постоянные калибровки на перекрестные помехи (вышеописанные).
- постоянные калибровки на перекрестные помехи (вышеописанные).
 - разность фаз между передатчиками электродов и токами (смотри ниже).
- разность фаз между передатчиками электродов и токами (смотри ниже).
I ij - ток, измеренный на аппликаторе i на частоте f j.
Компенсация выполняется вычитанием оценки тока перекрестных помех:
 .
.
Значения Q ij применяются в последующем описании.
Оценка импеданса тела
Оценка матрицы импедансов тела важна для компенсации утечки аблятора и частотной коррекции, как поясняется ниже.
Измерения представляются в виде результатов DFT (дискретного преобразования Фурье): Q
ij (после компенсации перекрестных помех) для измерения I
ij и P
j для измерения  .
.
Оценка матрицы проводимости между аппликаторами
Далее напряжения на аппликаторе обозначены как X ij (для аппликатора i и частоты f j). Кроме того, соответствующий генератор 74 контактного накладного электрода, который включен в состав приемника 58 контактного электрода (фиг.2), представлен в виде многочастотного параметра Eij≡δ ij E j (что, фактически, означает, аппликатор i пропускает только частоту f j). Тогда:
 ,
,
 .
.
Из вышеприведенного следует, что:
 .
.
Тогда напряжения на аппликаторах можно оценить следующим образом:


 .
.
Значение I ij можно вычислить из измерения Q ij следующим образом:
I ij=Ci ij·Q ij.
После этого можно вычислить напряжения аппликаторов:

Токи и напряжения аппликаторов связаны матрицей импедансов тела пациента (которая не зависит от частоты):
 .
.
Знак минус обусловлен правилом, что положительный ток протекает в тело, но измеряется как ток, вытекающий из тела. В матричном представлении: -I=σ·X. Оценка матрицы импедансов тела пациента имеет следующий вид σ=-I·X -1. В данном выражении, I означает матрицу токов, а не единичную матрицу:
σ=-[Ci ij·Q ij][X ij]-1.
В последующем, выполняются некоторые дополнительные поправки σ, в которых, в конце, выполняется транспозиция σ:


 .
.
Компенсация аппликатора аблятора
В данном разделе все токи являются «истинными измеренными токами», что означает, что значения DFT токов аппликаторов умножены на соответствующую калибровочную постоянную  , и значения DFT тока утечки аблятора умножены на соответствующую калибровочную постоянную
, и значения DFT тока утечки аблятора умножены на соответствующую калибровочную постоянную  .
.
Как также показано на фиг.2, аблятор 54 соединен с пациентом и системой 26 определения положения. Переключатель 70 замкнут. Электрод аблятора обычно находится на наконечнике 18 (фиг.1) катетера 14 и соответствует электроду 62 двойного назначения. Не весь ток, который подается в электрод 62 двойного назначения, протекает через тело 42 пациента в контактные накладные электроды 30. Часть тока, сформированного передатчиками 50 катетерных электродов, поступает также в аблятор 54, проникает в тело 42 пациента через контактный накладной электрод 56 аблятора и, наконец, проходит в контактные накладные электроды 30. Измерительные электроды 60 также испытывают воздействие. Составляющие их токов протекают по пути через электрод 62 двойного назначения, через входное сопротивление аблятора в аблятор 54, контактный накладной электрод 56 аблятора и, наконец, через контактные накладные электроды 30.
Фаза обучения при утечке во время абляции
Как также показано на фиг.2, фаза обучения при утечке во время абляции системы 26 определения положения начинается сразу после того, контактные накладные электроды 30 и контактный накладной электрод 56 аблятора устанавливают в заданные места.
Во время обучения при утечке во время абляции, переключатель 70 разомкнут, так что весь ток, который в ином случае направлялся бы через электрод 62 двойного назначения соответствующим передатчиком 50 катетерного электрода, направляется аблятором 54 через контактный накладной электрод 56 аблятора в контактные накладные электроды 30. Токи через контактные накладные электроды 30,  (p означает индекс аппликатора; f
M1 означает частоту M1 (абляционного электрода)), измеряются вместе с суммарным током через контактный накладной электрод 56 аблятора,
(p означает индекс аппликатора; f
M1 означает частоту M1 (абляционного электрода)), измеряются вместе с суммарным током через контактный накладной электрод 56 аблятора,  . Сумма упомянутых токов должна совпадать с выходным сигналом абляционного генератора 52 в пределах 20% отклонения:
. Сумма упомянутых токов должна совпадать с выходным сигналом абляционного генератора 52 в пределах 20% отклонения:
 .
.
Ток, скорректированный по частоте, вычисляют следующим образом:
 .
.
После этого можно вычислить токи  для каждой рабочей частоты путем использования оценки матрицы σ проводимости между аппликаторами, как описано выше:
для каждой рабочей частоты путем использования оценки матрицы σ проводимости между аппликаторами, как описано выше:
 ,
,
I - единичная матрица.
σ - оценка матрицы проводимости между аппликаторами, полученная как описано выше.
 - диагональная матрица с (r
ik
+q
ik
+z
ik) в качестве i-того диагонального элемента (катетер передает частоту f
k).
- диагональная матрица с (r
ik
+q
ik
+z
ik) в качестве i-того диагонального элемента (катетер передает частоту f
k).
Затем вычисляют отношения токов абляции на каждой частоте:
 ,
,
где  означает компоненту p вектора
означает компоненту p вектора  . Параметры
. Параметры  следует усреднять по предварительно заданному интервалу времени (30 секунд).
следует усреднять по предварительно заданному интервалу времени (30 секунд).
Нормальная работа
Как показано на фиг.2, во время нормальной работы системы переключатель 70 замкнут, и предполагается, что впоследствии аблятор 54 можно включать в любой момент. Токи через контактные накладные электроды 30,  , измеряют вместе с током через контактный накладной электрод 56 аблятора,
, измеряют вместе с током через контактный накладной электрод 56 аблятора,  . Компенсацию выполняют с использованием параметров
. Компенсацию выполняют с использованием параметров  , полученных в фазе инициализации, следующим образом:
, полученных в фазе инициализации, следующим образом:
 .
.
Получаемые компенсирующие токи  передаются дальше в модуль частотной коррекции, который можно реализовать как системную программу или аппаратный модуль в процессоре 22 для определения положения (фиг.1).
передаются дальше в модуль частотной коррекции, который можно реализовать как системную программу или аппаратный модуль в процессоре 22 для определения положения (фиг.1).
Частотная коррекция
Матрица проводимости тела записывается в виде:
 ,
,
где σ body разделяется на составляющую катетера и составляющую аппликатора следующим образом:
e - суммарный ток, исходящий из электрода катетера (при возбуждении 1-В источником),
s - вектор токов, принимаемых на аппликаторах, от электрода,
σ - матрица проводимости между аппликаторами по вышеописанной оценке.
Пусть матрица  отражает сопротивления электрода и аппликаторов на частоте f
k (
отражает сопротивления электрода и аппликаторов на частоте f
k ( является диагональной матрицей с диагональным расположением сопротивлений электрода и аппликаторов). Разделим на катетерную (не имеющую сопротивления) и аппликаторные части,
является диагональной матрицей с диагональным расположением сопротивлений электрода и аппликаторов). Разделим на катетерную (не имеющую сопротивления) и аппликаторные части,
 ,
,
где  является диагональной матрицей, с (z
ik+q
ik+r
ik) в качестве номера i диагонального элемента.
является диагональной матрицей, с (z
ik+q
ik+r
ik) в качестве номера i диагонального элемента.
Полная матрица проводимости (сопротивлений тела+аппликаторов) имеет вид

Если снова разделить электрод и аппликаторы, то получается:

На конечном этапе вычислялись только подходящие количественные параметры. Это означает, что оценку
S
идеализированного измерения (когда сопротивления аппликаторов равны нулю) можно получить на основе реального измерения  следующим образом:
следующим образом:
 .
.
Вычисление компенсации
Запись тока, скомпенсированного на абляцию, вместо дает частотно-скорректированные токи в виде:
 .
.
В данном случае, комплексные величины преобразованы в действительные путем взятия их абсолютных значений.
I - единичная матрица.
σ - матрица проводимости между аппликаторами согласно вышеприведенной оценке.
 - диагональная матрица, с (r
ik+q
ik+z
ik) в качестве i-того диагонального элемента (катетер передает на частоте f
k).
- диагональная матрица, с (r
ik+q
ik+z
ik) в качестве i-того диагонального элемента (катетер передает на частоте f
k).
 - ток после компенсации утечки абляции.
- ток после компенсации утечки абляции.
Получаемый в результате вектор  является скомпенсированным, частотно-независимым измеренным параметром, который зависит только от положения электрода.
является скомпенсированным, частотно-независимым измеренным параметром, который зависит только от положения электрода.
Специалистам в данной области техники следует понимать, что настоящее изобретение не ограничено тем, что конкретно показано и охарактеризовано выше в настоящем описании. Наоборот, объем настоящего изобретения включает в себя как комбинации, так и подкомбинации различных признаков, охарактеризованных выше в настоящем описании, а также их варианты и модификации, которые не известны из предшествующего уровня техники и которые могут быть созданы специалистами в данной области техники после прочтения вышеприведенного описания.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩЕЕ УСТРОЙСТВО ДЛЯ ТОКОВОЙ ЛОКАЛИЗАЦИИ | 2009 |
|
RU2527152C2 |
| УПРАВЛЕНИЕ МОЩНОСТЬЮ АБЛЯЦИИ НА ОСНОВЕ КОНТАКТНОЙ СИЛЫ | 2013 |
|
RU2648213C2 |
| НАПРАВЛЯЕМАЯ АБЛЯЦИЯ СЕРДЦА С ИСПОЛЬЗОВАНИЕМ МАШИННОГО ОБУЧЕНИЯ (ML) | 2020 |
|
RU2779871C2 |
| ПРИМЕНЕНИЕ АБЛЯЦИИ ПУТЕМ НЕОБРАТИМОЙ ЭЛЕКТРОПОРАЦИИ (НЭП) С ИСПОЛЬЗОВАНИЕМ КАТЕТЕРА С МАТРИЦЕЙ ЭЛЕКТРОДОВ | 2021 |
|
RU2762988C1 |
| ВИЗУАЛИЗАЦИЯ ЗОНДА, ОСНОВАННАЯ НА МЕХАНИЧЕСКИХ СВОЙСТВАХ | 2009 |
|
RU2521689C2 |
| ИГЛА С НЕСКОЛЬКИМИ ДАТЧИКАМИ | 2015 |
|
RU2695259C2 |
| ДИСПЛЕЙ КАТЕТЕРА, ПОКАЗЫВАЮЩИЙ УГОЛ НАКЛОНА И ДАВЛЕНИЕ | 2009 |
|
RU2574369C2 |
| СИНХРОНИЗАЦИЯ МЕДИЦИНСКИХ УСТРОЙСТВ ПО ЦИФРОВОМУ ИНТЕРФЕЙСУ | 2009 |
|
RU2514533C2 |
| КАТЕТЕР С РЕГУЛИРУЕМОЙ ДУГООБРАЗНОЙ ДИСТАЛЬНОЙ СЕКЦИЕЙ | 2012 |
|
RU2542088C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОШИБКИ ЗОНДА ДЛЯ ПРИБОРА НА ОСНОВЕ ИНДУКЦИИ ИЛИ РАСПРОСТРАНЕНИЯ С ПОПЕРЕЧНЫМИ ИЛИ ТРЕХОСНЫМИ МАССИВАМИ | 2004 |
|
RU2401442C2 |


Изобретение относится к способам и устройствам для считывания положения зонда в теле. Способ заключается в установке в теле зонда с электродом на внешней поверхности, установке множества контактных накладных электродов на поверхности тела, измерении картирующих электрических токов, протекающих между электродом на внешней поверхности зонда и множеством контактных накладных электродов на поверхности тела посредством измерительных схем контактных накладных электродов, калибровке измерения посредством компенсации токов утечки, протекающих по пути, продолжающемся от электрода на внешней поверхности зонда через аблятор и контактный накладной электрод аблятора к множеству контактных накладных электродов, и вычислении положения зонда в теле на основании картирующих токов с использованием калиброванных измерений. Устройство выполнено с возможностью осуществления этапов способа. Использование изобретения обеспечивает точное определение местоположения объекта в теле пациента. 2 н. и 20 з.п. ф-лы, 5 ил.
1. Способ считывания положения зонда в теле, содержащий этапы, на которых:
устанавливают в теле зонд, имеющий, по меньшей мере, один электрод (32) на внешней поверхности зонда;
устанавливают множество контактных накладных электродов (30) на поверхности тела;
производят измерения картирующих электрических токов, протекающих между, по меньшей мере, одним электродом (32) на внешней поверхности зонда и множеством контактных накладных электродов (30) на поверхности тела посредством измерительных схем контактных накладных электродов;
калибруют измерения посредством компенсации токов утечки, протекающих по пути, продолжающемся от электрода (32) на внешней поверхности зонда через, по меньшей мере, аблятор и контактный накладной электрод (56) аблятора к множеству контактных накладных электродов (30); и
вычисляют положение зонда в теле на основании картирующих электрических токов с использованием калиброванных измерений.
2. Способ по п.1, в котором этап калибровки измерений дополнительно содержит этап вычисления перекрестных помех, вызываемых генератором картирования.
3. Способ по п.2, в котором до установки зонда в тело выполняют этапы, на которых:
электрически шунтируют измерительные схемы контактных накладных электродов, используя переключатель; и
затем определяют соответствующие сигналы перекрестных помех, имеющих место на контактных накладных электродах (30), с использованием измерительных схем контактных накладных электродов.
4. Способ по п.3, в котором этап определения соответствующих сигналов перекрестных помех содержит этап определения для каждого из контактных накладных электродов (30) фаз между токами и напряжениями, возникающими в них, при этом токи и напряжения вводятся из передатчиков, соединенных, соответственно, с, по меньшей мере, одним электродом (32) на внешней поверхности зонда.
5. Способ по п.2, в котором этап вычисления положения выполняют в то время, когда аблятор подсоединен к телу и к генератору одного из картирующих электрических токов.
6. Способ по п.5, в котором этап вычисления соответствующих токов утечки содержит этапы, на которых:
отсоединяют аблятор от зонда;
определяют ток утечки аблятора, протекающий от генератора одного из картирующих электрических токов через аблятор и контактный накладной электрод (56) аблятора; и
вычисляют отношение между током утечки аблятора и картирующими электрическими токами на соответствующих рабочих частотах картирующих электрических токов.
7. Способ по п.5, в котором этап вычисления соответствующих токов утечки дополнительно содержит этапы, на которых:
отсоединяют аблятор от зонда;
определяют ток утечки аблятора, протекающий от генератора одного из картирующих электрических токов через аблятор и контактный накладной электрод (56) аблятора; и
определяют соответствующие составляющие тока утечки аблятора на контактных накладных электродах (30); и
вычисляют отношения между составляющими и током утечки аблятора, соответственно.
8. Способ по п.5, в котором этап вычисления соответствующих токов утечки выполняют после установки зонда в тело и содержит этап определения отношения между каждым из картирующих электрических токов и суммой картирующих электрических токов, протекающих через контактные накладные электроды (30).
9. Способ по п.8, в котором этап определения отношения выполняют на соответствующих рабочих частотах картирующих электрических токов в контактных накладных электродах (30).
10. Способ по п.1, в котором этап калибровки измерений дополнительно содержит этап присоединения контактных накладных электродов (30) к соответствующим приемникам контактных накладных электродов и генераторам контактных накладных электродов и этап применения приемников контактных накладных электродов и генераторов контактных накладных электродов для определения матрицы проводимости между контактными накладными электродами у контактных накладных электродов (30).
11. Способ по п.10, дополнительно содержащий этап применения матрицы проводимости между контактными накладными электродами, чтобы выполнять частотную компенсацию токов, измеряемых приемниками контактных накладных электродов.
12. Устройство для считывания положения зонда, содержащее:
зонд, выполненный с возможностью введения в тело субъекта;
по меньшей мере, один электрод (32) на внешней поверхности зонда, расположенный вблизи дистального конца зонда;
множество контактных накладных электродов (30), выполненных с возможностью присоединения в соответствующих местоположениях к поверхности тела;
по меньшей мере, один передатчик электрода, соединенный с электродом (32) на внешней поверхности зонда, выполненный с возможностью пропускания картирующих электрических токов между электродом (32) на внешней поверхности зонда и контактными накладными электродами (30) на поверхности тела; и
блок управления, выполненный с возможностью выполнения измерений картирующих электрических токов, протекающих между, по меньшей мере, одним электродом (32) на внешней поверхности зонда и множеством контактных накладных электродов (30) на поверхности тела посредством измерительных схем контактных накладных электродов, с возможностью калибровки измерений посредством компенсации токов утечки, протекающих по пути, продолжающемся от электрода (32) на внешней поверхности зонда через, по меньшей мере, аблятор и контактный накладной электрод (56) аблятора к множеству контактных накладных электродов (30), и с возможностью вычисления положения зонда в теле на основании картирующих электрических токов с использованием калиброванных измерений.
13. Устройство по п.12, в котором калибровка измерений дополнительно содержит вычисление перекрестных помех, вызываемых генератором картирования.
14. Устройство по п.13, в котором устройство дополнительно содержит:
электрический шунт измерительных схем контактных накладных электродов, соединенный с переключателем;
причем измерительные схемы контактных накладных электродов выполнены с возможностью определения соответствующих сигналов перекрестных помех, имеющих место на контактных накладных электродах (30).
15. Устройство по п.14, в котором определение соответствующих сигналов перекрестных помех содержит определение для каждого из контактных накладных электродов (30) фаз между токами и напряжениями, возникающими в них, при этом токи и напряжения вводятся из передатчиков, соединенных, соответственно, с, по меньшей мере, одним электродом (32) на внешней поверхности зонда.
16. Устройство по п.13, в котором вычисление положения выполняется в то время, когда аблятор подсоединен к телу и к генератору одного из картирующих электрических токов.
17. Устройство по п.16, в котором вычисление соответствующих токов утечки дополнительно содержит:
определение тока утечки аблятора, протекающего от генератора одного из картирующих электрических токов через аблятор и контактный накладной электрод (56) аблятора, когда аблятор отсоединен от зонда; и
вычисление отношения между током утечки аблятора и картирующими электрическими токами на соответствующих рабочих частотах картирующих электрических токов.
18. Устройство по п.16, в котором вычисление соответствующих токов утечки дополнительно содержит:
определение тока утечки аблятора, протекающего от генератора одного из картирующих электрических токов через аблятор и контактный накладной электрод (56) аблятора, когда аблятор отсоединен от зонда; и
определение соответствующих составляющих тока утечки аблятора на контактных накладных электродах (30); и
вычисление отношений между составляющими и током утечки аблятора, соответственно.
19. Устройство по п.16, в котором вычисление соответствующих токов утечки выполняется после установки зонда в тело и содержит определение отношения между каждым из картирующих электрических токов и суммой картирующих электрических токов, протекающих через контактные накладные электроды (30).
20. Устройство по п.19, в котором определение отношения выполняется на соответствующих рабочих частотах картирующих электрических токов в контактных накладных электродах (30).
21. Устройство по п.12, в котором калибровка измерений дополнительно содержит присоединение контактных накладных электродов (30) к соответствующим приемникам контактных электродов и контактным накладным генераторам и применение приемников контактных электродов и контактных накладных генераторов для определения матрицы проводимости между контактными накладными электродами у контактных накладных электродов (30).
22. Устройство по п.21, в котором блок управления выполнен с дополнительной возможностью применения матрицы проводимости между контактными накладными электродами, чтобы выполнять частотную компенсацию токов, измеряемых приемникам контактных электродов.
| US 2007060832 A1, 15.03.2007 | |||
| US 2003078509 A1, 24.04.2003 | |||
| US 2008177278 A1, 24.07.2008 | |||
| WO 2003026525 A1, 03.04.2003 | |||
| US 2006241401 A1, 26.10.2006 | |||
| НЕЙРОНАВИГАЦИОННАЯ ЭНДОСКОПИЧЕСКАЯ СИСТЕМА | 2004 |
|
RU2290055C2 |

