Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству обработки изображения, которое обнаруживает сигнал от дефектного пикселя датчика изображения, и способу управления устройством обработки изображения.
Уровень техники
Формирователи сигналов изображения, такие как цифровые камеры или цифровые видеокамеры, в основном используют датчики на основе прибора с зарядовой связью (датчики CCD) или датчики CMOS в качестве датчиков изображения, в которых расположены цветовые фильтры. С такими датчиками изображения бывают случаи, когда дефектный пиксель (также называемый «дефектом мерцания») возникает в связи со структурными факторами, факторами, возникающими в процессе производства, внешними факторами, возникающими после производства, и т.д. Например, одним из примеров факторов, которые производят дефектные пиксели в датчике CMOS, является появление шума в плавающей диффузии, когда заряды принимаются от фотодиодов. Такой шум не всегда возникает периодически, поэтому иногда шум может возникать в частых интервалах, таких как формирование изображения каждые несколько раз, и иногда шум может появляться в нечастых интервалах, таких как каждые несколько лет. Также известно, что частота появления дефектных пикселей в датчике изображения не зависит от температуры и времени накопления заряда.
В связи с этим методы обнаружения дефектного пикселя в датчике изображения были предложены в патентных публикациях Японии №2004-297267 и №2001-086517. При помощи этих методов возможно обнаружить не только дефектные пиксели, появляющиеся в конкретном месте в течение процесса производства, но и дефектные пиксели, возникающие после производства. Например, патентная публикация Японии №2004-297267 раскрывает метод получения для каждого цветового фильтра разности уровней сигнала между интересующим пикселем и множеством пикселей, соседних с интересующим пикселем, и если все разности больше или равны пороговому значению, определения интересующего пикселя как дефектного пикселя. Патентная публикация Японии №2001-086517 раскрывает метод получения значений яркости всех пикселей независимо от цвета цветовых фильтров, и если разность уровней яркости между интересующим пикселем и множеством соседних пикселей больше или равна пороговому значению, определения интересующего пикселя как дефектного пикселя.
Однако при использовании обычных технологий дефектный пиксель, возникающий в датчике изображения, не может быть обнаружен с высокой точностью. К примеру, при использовании метода, раскрытого в патентной публикации Японии №2004-297267, в том случае, если выполняется высокочувствительное формирование изображения, коэффициент усиления данных изображения (сигнал изображения) возрастает и соответственно компонент шума, включенный в данные изображения, также усиливается, так, в некоторых случаях компонент шума может быть более заметным, чем уровни сигнала пикселей, соседних с интересующим пикселем. В частности, в области, где пространственная частота объекта низкая, есть более высокая вероятность того, что такой компонент шума будет иметь большее значение, чем уровни сигнала пикселей, соседних с интересующим пикселем, и в результате разность уровней сигнала между интересующим пикселем и соседними пикселями становится больше порогового значения, и интересующий пиксель может быть неправильно определен в качестве дефектного пикселя. Следует отметить, что хотя и возможно, что пороговое значение установлено высоким с целью избежать такого неправильного определения, в области, где уровень сигнала высокий, сложно обнаружить дефектный пиксель, потому что разность уровней сигнала между интересующим пикселем и соседними пикселями мала (менее очевидна). Проблемы, подобные тем, что рассматриваются в патентной публикации Японии №2004-297267, также появляются в случае метода, раскрытого в патентной публикации Японии №2001-086517.
Раскрытие изобретения
Настоящее изобретение обеспечивает технологию обнаружения дефектного пикселя в датчике изображения с высокой точностью.
В соответствии с одним аспектом настоящего изобретения предусмотрено устройство обработки изображения для обнаружения из данных изображения, сформированных датчиком изображения, образованным множеством пикселей, сигнала от дефектного пикселя датчика изображения, содержащее:
первый блок определения (первое средство определения), выполненный с возможностью получения первого значения определения, указывающего величину разности уровней сигнала между интересующим пикселем и множеством пикселей, расположенных вблизи интересующего пикселя;
второй блок определения (второе средство определения), выполненный с возможностью получения второго значения определения, указывающего ширину распределения разности уровней сигнала между интересующим пикселем и множеством пикселей, расположенных вблизи интересующего пикселя; и
блок обнаружения (средство обнаружения), выполненный с возможностью обнаружения, является ли сигнал от интересующего пикселя сигналом дефектного пикселя, с использованием первого значения определения и второго значения определения,
в котором первый блок определения получает первое значение определения путем получения разностей уровней сигнала между интересующим пикселем и каждым из множества пикселей, расположенных вблизи интересующего пикселя, получения из каждой разности значения, указывающего вероятность того, что сигнал интересующего пикселя является сигналом дефектного пикселя, и перемножения полученных значений,
при этом первое значение определения представляет собой значение, которое возрастает по мере возрастания величины разности, а второе значение определения представляет собой значение, которое возрастает по мере уменьшения ширины распределения величины разности, и
блок обнаружения обнаруживает сигнал от интересующего пикселя как сигнал дефектного пикселя, когда и первое значение определения, и второе значение определения больше или равны заданному пороговому значению.
При этом устройство обработки изображения дополнительно содержит блок коррекции (средство коррекции), выполненный с возможностью коррекции уровня сигнала интересующего пикселя с использованием значения коррекции, полученного из уровней сигналов пикселей, расположенных вблизи интересующего пикселя, когда блок обнаружения обнаруживает сигнал от интересующего пикселя как сигнал дефектного пикселя, а также дополнительно содержит:
блок обработки (средство обработки), выполненный с возможностью выполнения обработки фильтра верхних частот в области, включающей в себя интересующий пиксель, во множестве направлений, центрированных на интересующем пикселе,
при этом первый блок определения получает первое значение определения из абсолютного значения результата обработки фильтра верхних частот и
второй блок определения получает второе значение определения из ширины распределения абсолютного значения результата обработки фильтра верхних частот.
Кроме того, в устройстве обработки изображения блок обработки осуществляет обработку фильтра нижних частот в области, включающей в себя интересующий пиксель, во множестве направлений, центрированных на интересующем пикселе, до выполнения обработки фильтра нижних частот, и
блок обработки осуществляет обработку фильтра нижних частот в одном из направлений, центрированных на интересующем пикселе, и затем выполняет обработку фильтра верхних частот в другом из направлений, центрированных на интересующем пикселе, отличном от направления обработки фильтра нижних частот.
При этом устройство обработки изображения дополнительно содержит:
множество блоков обработки (средств обработки), выполненных с возможностью осуществления обработки фильтра верхних частот в различных диапазонах частот;
множество первых блоков определения (первых средств определения) и множество вторых блоков определения (вторых средств определения), которые обеспечены соответственно множеству блоков обработки; и
блок выбора (средство выбора), выполненный с возможностью выбора значения, полученного из первого значения определения и второго значения определения, полученных от первого блока определения и второго блока определения, которые соответствуют одному из блоков обработки.
Согласно второму аспекту изобретения предусмотрено устройство обработки изображения для обнаружения из данных изображения, сформированных датчиком изображения, образованным множеством пикселей, сигнала от дефектного пикселя датчика изображения, содержащее:
первый блок определения, выполненный с возможностью получения первого значения определения, указывающего величину разности уровней сигнала между интересующим пикселем и множеством пикселей, расположенных вблизи интересующего пикселя;
второй блок определения, выполненный с возможностью получения второго значения определения, указывающего ширину распределения разности уровней сигнала между интересующим пикселем и множеством пикселей, расположенных вблизи интересующего пикселя;
блок коррекции, выполненный с возможностью коррекции, с использованием значения, полученного путем перемножения первого значения определения и второго значения определения, уровня сигнала интересующего пикселя путем взвешивания и суммирования уровня сигнала интересующего пикселя и значения коррекции, полученного из уровней сигнала пикселей, расположенных поблизости от интересующего пикселя,
при этом первый блок определения получает первое значение определения путем получения разностей уровней сигнала между интересующим пикселем и каждым из множества пикселей, находящихся поблизости от интересующего пикселя, получения из каждой разности значения, указывающего вероятность того, что сигнал от интересующего пикселя является сигналом дефектного пикселя, и перемножения полученных значений,
при этом первое значение определения является значением, которое увеличивается по мере возрастания величины разности, а второе значение определения является значением, которое возрастает по мере уменьшения ширины распределения величины разности, и
блок коррекции назначает больший вес значению коррекции, по мере возрастания значения, полученного путем перемножения первого значения определения и второго значения определения.
При этом устройство обработки изображения дополнительно содержит:
блок обработки, выполненный с возможностью осуществления обработки фильтра верхних частот в области, включающей в себя интересующий пиксель, во множестве направлений, центрированных на интересующем пикселе,
при этом первый блок определения получает первое значение определения из абсолютного значения результата обработки фильтра верхних частот и
второй блок определения получает второе значение определения из ширины распределения абсолютного значения результата обработки фильтра верхних частот.
Кроме того, в устройстве обработки изображения
блок обработки до выполнения обработки фильтра верхних частот выполняет обработку фильтра нижних частот в области, включающей в себя интересующий пиксель, во множестве направлений, центрированных на интересующем пикселе, и
блок обработки выполняет обработку фильтра нижних частот в одном из направлений, центрированных на интересующем пикселе, и затем выполняет обработку фильтра верхних частот в другом направлении из центрированных на интересующем пикселе, отличном от направления обработки фильтра нижних частот.
При этом устройство обработки изображения дополнительно содержит:
множество блоков обработки, выполненных с возможностью осуществления обработки фильтра верхних частот в различных диапазонах частот;
множество первых блоков определения и множество вторых блоков определения, которые обеспечены соответственно множеству блоков обработки; и
блок выбора, выполненный с возможностью выбора значения, полученного из первого значения определения и второго значения определения, полученных первым блоком определения и вторым блоком определения, которые соответствуют одному из блоков обработки.
Согласно еще одному аспекту изобретения предусмотрен способ управления для устройства обработки изображения, которое обнаруживает из данных изображения, сформированных датчиком изображения, образованным множеством пикселей, сигнал от дефектного пикселя датчика изображения, содержащий:
выполняемый первым блоком определения этап получения первого значения определения, указывающего величину разности уровней сигнала между интересующим пикселем и множеством пикселей, расположенных вблизи интересующего пикселя, причем первое значение определения увеличивается по мере возрастания величины разности;
выполняемый вторым блоком определения этап получения второго значения определения, указывающего ширину распределения величины разности уровней сигнала между интересующим пикселем и множеством пикселей, расположенных поблизости от интересующего пикселя, причем второе значение определения увеличивается по мере уменьшения ширины распределения величины разности; и
выполняемый блоком обнаружения этап обнаружения сигнала от интересующего пикселя как сигнала дефектного пикселя, когда как первое значение определения, так и второе значение определения больше или равны заданному пороговому значению,
при этом на этапе получения первого значения определения первый блок определения получает первое значение определения путем получения разностей уровней сигнала между интересующим пикселем и каждым из множества пикселей, находящихся поблизости от интересующего пикселя, получения из каждой разности значения, указывающего вероятность того, что сигнал от интересующего пикселя является сигналом дефектного пикселя, и перемножения полученных значений.
Согласно четвертому аспекту изобретения предусмотрен способ управления для устройства обработки изображения, которое обнаруживает из данных изображения, сформированных датчиком изображения, образованным множеством пикселей, сигнал от дефектного пикселя датчика изображения, содержащий:
выполняемый первым блоком определения этап получения первого значения определения, указывающего величину разности уровней сигнала между интересующим пикселем и множеством пикселей, расположенных вблизи интересующего пикселя, причем первое значение определения увеличивается по мере возрастания величины разности;
выполняемый вторым блоком определения этап получения второго значения определения, указывающего ширину распределения величины разности уровней сигнала между интересующим пикселем и множеством пикселей, расположенных вблизи интересующего пикселя, причем второе значение определения увеличивается по мере уменьшения ширины распределения величины разности; и
выполняемый блоком коррекции этап коррекции уровня сигнала интересующего пикселя путем взвешивания и суммирования уровня сигнала интересующего пикселя и значения коррекции, полученного из уровней сигнала пикселей, расположенных поблизости от интересующего пикселя, так что значению коррекции назначается больший вес по мере возрастания значения, полученного путем перемножения первого значения определения и второго значения определения,
при этом на этапе получения первого значения определения первый блок определения получает первое значение определения путем получения разностей уровней сигнала между интересующим пикселем и каждым из множества пикселей, находящихся поблизости от интересующего пикселя, получения из каждой разности значения, указывающего вероятность того, что сигнал от интересующего пикселя является сигналом дефектного пикселя, и перемножения полученных значений.
Другие аспекты настоящего изобретения станут более очевидны из нижеследующего описания иллюстративных вариантов выполнения со ссылкой на сопровождающие чертежи.
Краткое описание чертежей
Фиг.1 представляет собой блок-схему, показывающую конфигурацию устройства формирования изображения, в отношении которого применяется устройство обработки изображения, составляющее аспект настоящего изобретения.
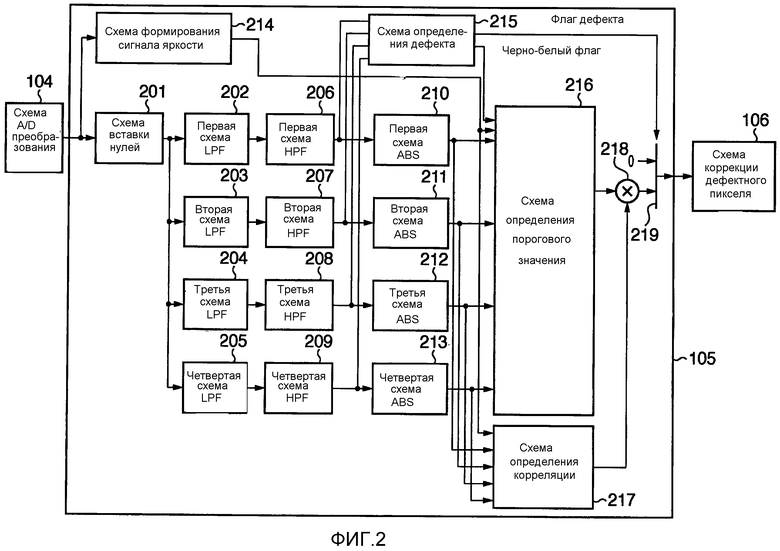
Фиг.2 представляет собой блок-схему, показывающую конфигурацию схемы определения дефектного пикселя в устройстве формирования изображения, показанном на фиг.1.
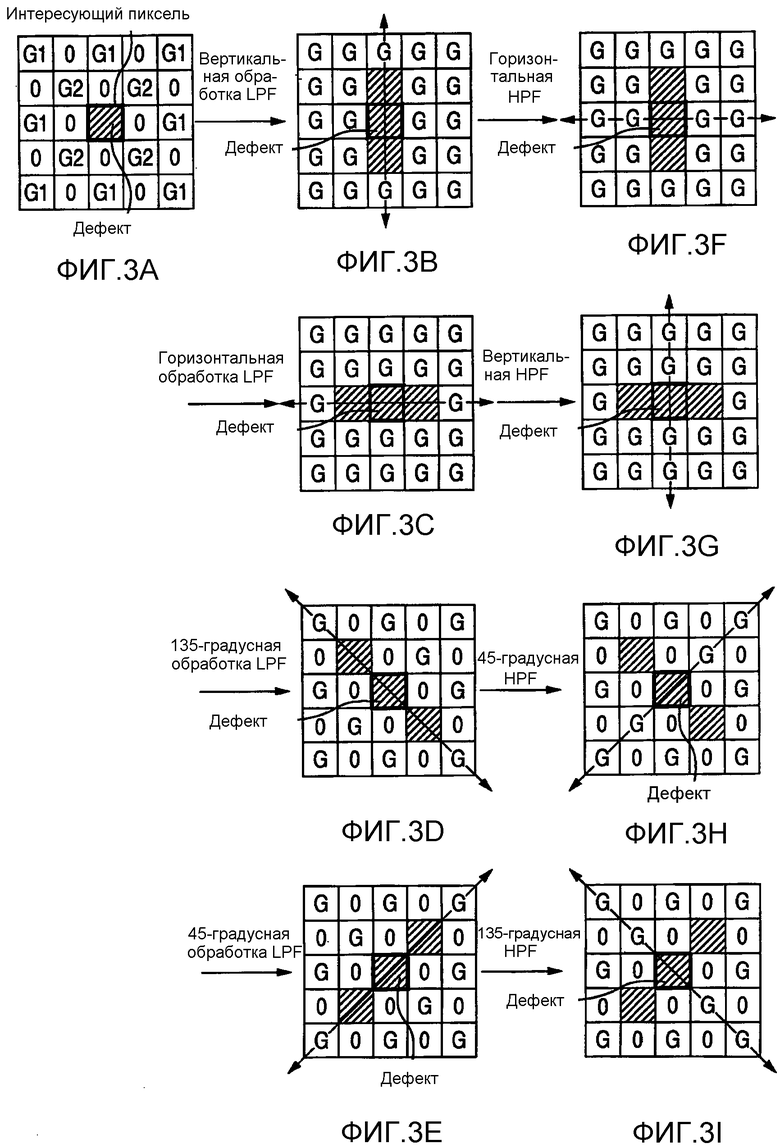
Фиг.3A-3I представляют собой схемы, иллюстрирующие обработку, осуществляемую схемой вставки нулей, схемами LPF и схемами HPF в схеме определения дефектного пикселя, показанной на фиг.2.
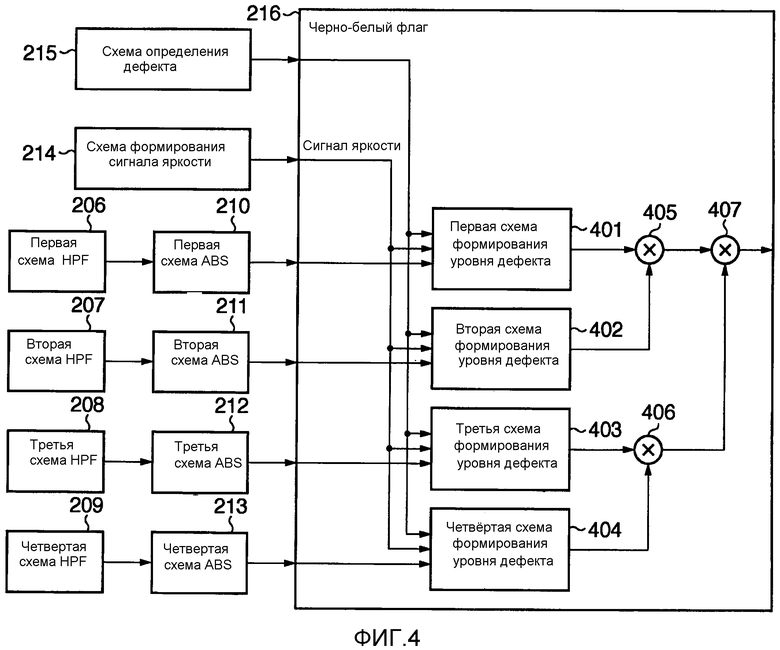
Фиг.4 представляет собой блок-схему, показывающую конфигурацию схемы определения порогового значения в схеме определения дефектного пикселя, показанной на фиг.2.
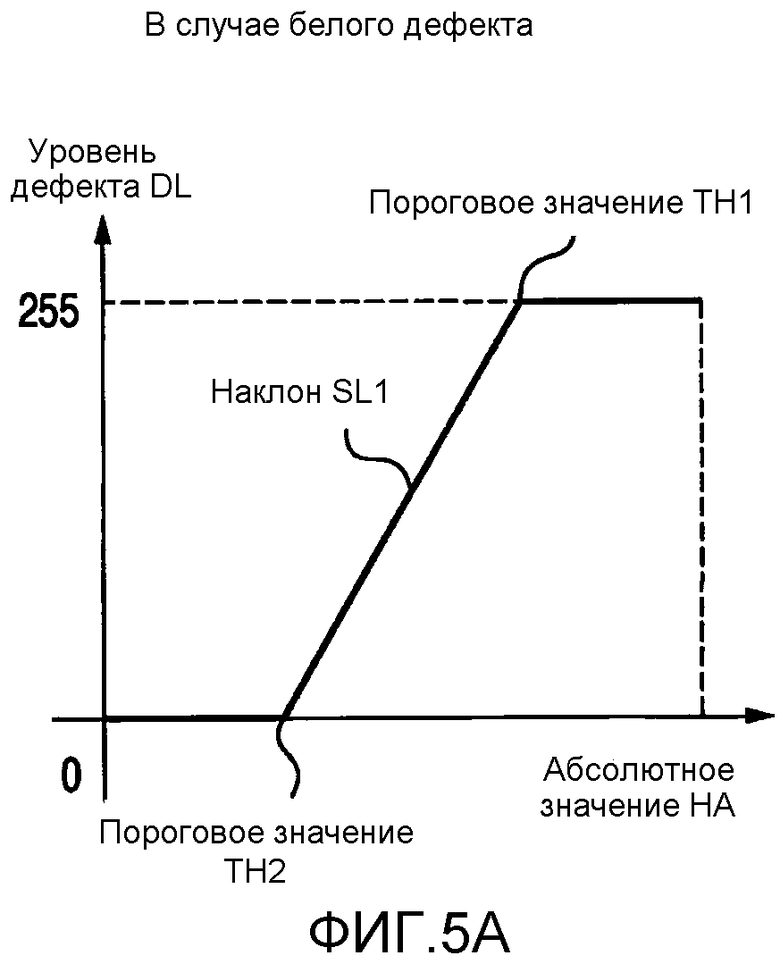
Фиг.5А и 5В представляют собой схемы, иллюстрирующие формирование уровня дефекта, выполняемое схемой формирования уровня дефекта в схеме определения порогового значения, показанной на фиг.4.
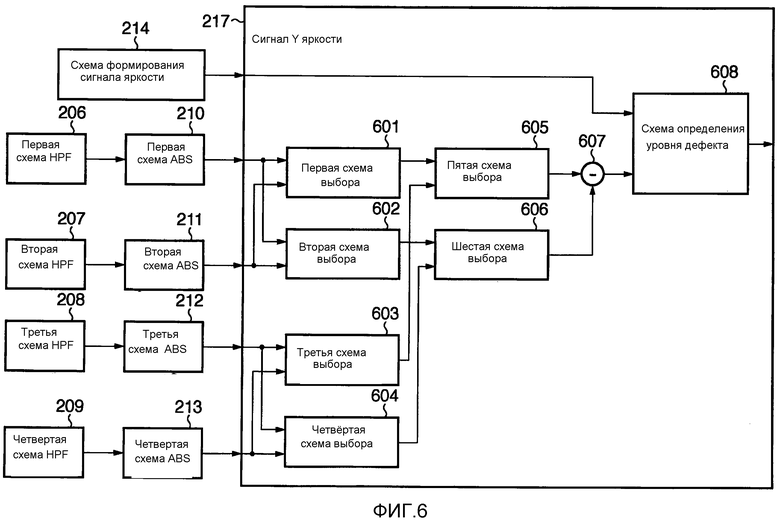
Фиг.6 представляет собой блок-схему, показывающую конфигурацию схемы определения корреляции в схеме обнаружения дефектного пикселя, показанной на фиг.2.
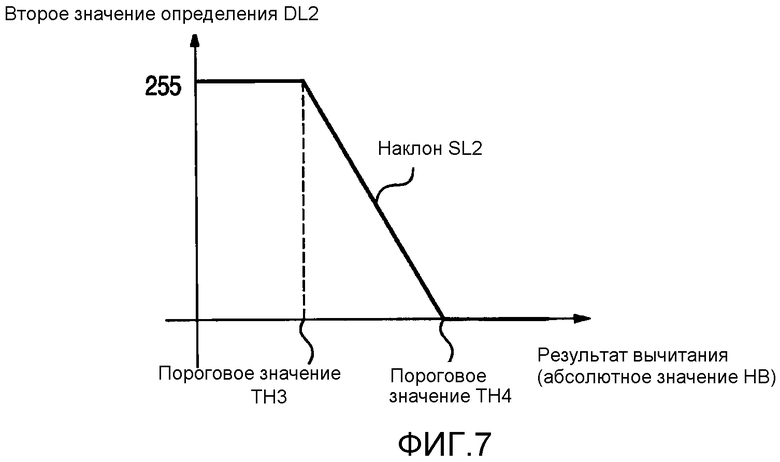
Фиг.7 представляет собой график, иллюстрирующий формирование второго значения определения, выполняемое схемой формирования уровня дефекта в схеме определения корреляции, показанной на фиг.6.
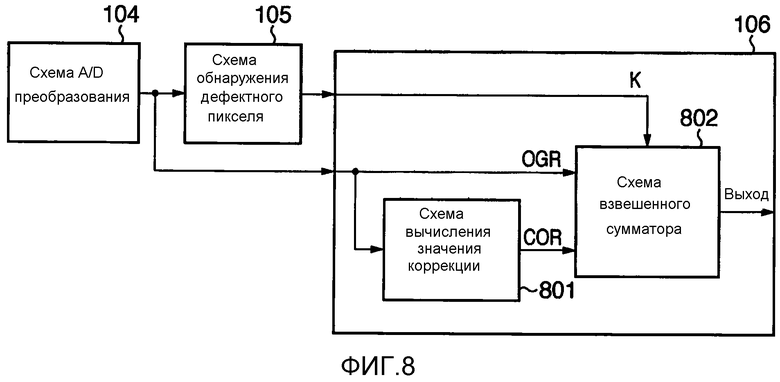
Фиг.8 представляет собой блок-схему, показывающую конфигурацию схемы коррекции дефектного пикселя в устройстве формирования изображения, показанном на фиг.1.
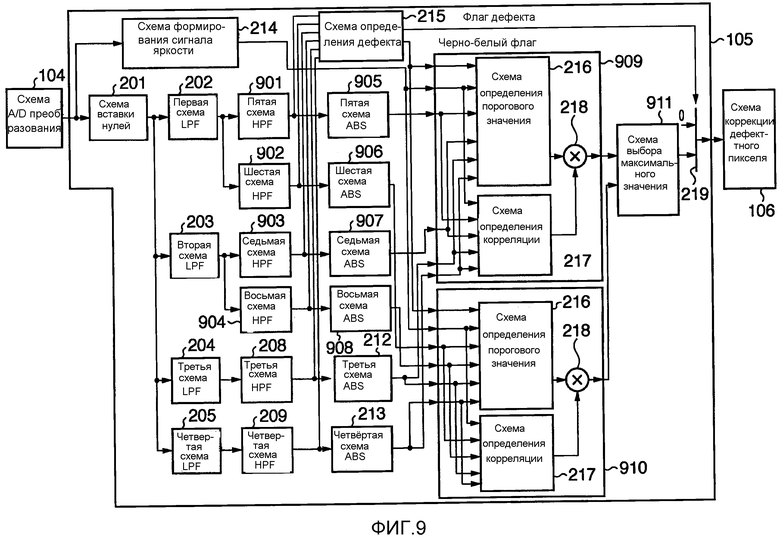
Фиг.9 представляет собой блок-схему, показывающую другую конфигурацию схемы обнаружения дефектного пикселя в устройстве формирования изображения, показанном на фиг.1.
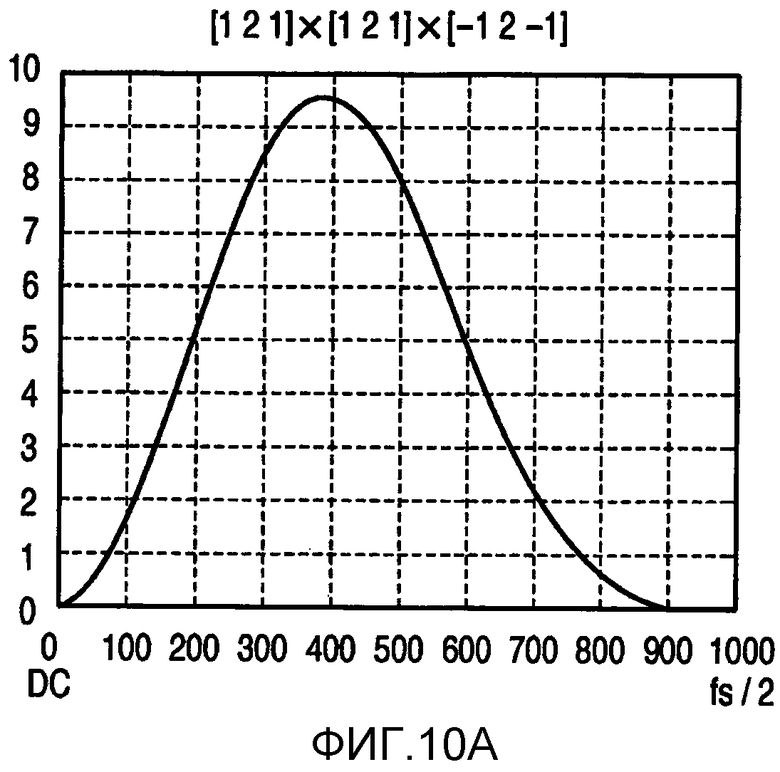
Фиг.10А и 10В представляют собой графики, иллюстрирующие обработку HPF, выполняемую пятой схемой HPF и шестой схемой HPF в схеме обнаружения дефектного пикселя, показанной на фиг.9.
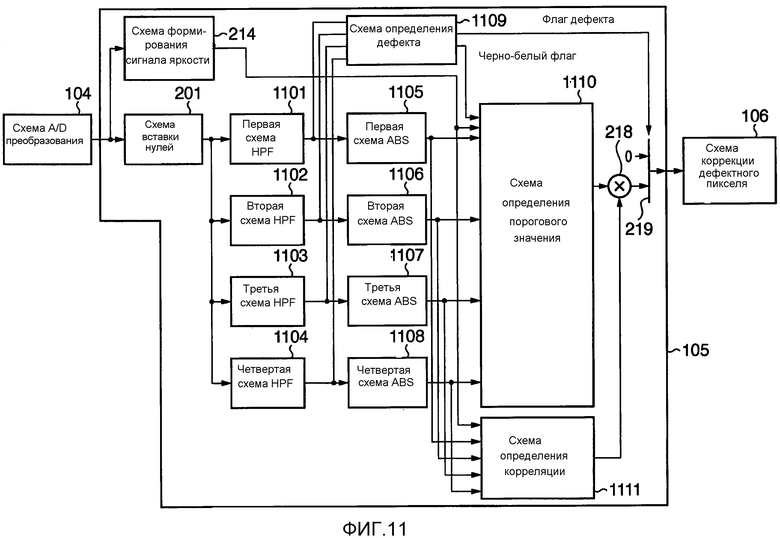
Фиг.11 представляет собой блок-схему, показывающую еще одну конфигурацию схемы обнаружения дефектного пикселя в устройстве формирования изображения, показанном на фиг.1.
Осуществление изобретения
Предпочтительные варианты осуществления настоящего изобретения будут описаны ниже со ссылкой на сопровождающие чертежи. Следует отметить, что одни и те же ссылочные позиции обозначают одни и те же элементы на всех чертежах и повторное их описание не будет представлено.
Фиг.1 представляет собой блок-схему, показывающую конфигурацию устройства 100 формирования изображения, в котором применимо устройство обработки изображения, составляющее аспект настоящего изобретения. Устройство 100 формирования изображения представляет собой устройство формирования изображения для съемки изображения объекта и реализовано в настоящем варианте осуществления в виде цифровой камеры.
Устройство 100 формирования изображения включает в себя линзу 101 формирования изображения, апертуру 102, датчик 103 изображения, в котором расположены R (красный), G (зеленый) и В (синий) цветовые фильтры, и схему 104 аналого-цифрового преобразования (A/D преобразования), которая преобразует аналоговый сигнал изображения (электрический сигнал), принятый от датчика 103 изображения, в цифровые данные изображения. Устройство 100 формирования изображения также включает в себя схему 105 обнаружения дефектного пикселя, выступающую в качестве устройства обработки изображения, которое обнаруживает сигнал от дефектного пикселя (такой как дефект мерцания) в датчике 103 изображения. Устройство 100 формирования изображения также включает в себя схему 106 коррекции дефектного пикселя, которая осуществляет коррекцию сигнала, который был определен схемой 105 обнаружения дефектного пикселя как выходной сигнал от дефектного пикселя. Устройство 100 формирования изображения также включает в себя схему 107 управления памятью, которая осуществляет арбитраж шины между схемами, DRAM 108, которое временно хранит данные изображения, и схему 109 обработки изображения, которая осуществляет обработку изображения, такую как обработка цветового преобразования и обработка резкости. Устройство 100 формирования изображения также включает в себя схему 110 масштабирования, которая уменьшает или увеличивает данные изображения, системный контроллер 111, который определяет параметры и режим каждой схемы, и блок 112 отображения, который отображает (воспроизводит) изображение, соответствующее данным изображения. Устройство 100 формирования изображения также включает в себя схему 113 модуляции видео, которая модулирует сигнал изображения, для того чтобы воспроизвести изображение на блоке 112 отображения, и схему 114 сжатия, которая выполняет обработку сжатия данных изображения. Устройство 100 формирования изображения также включает в себя съемный носитель 115 записи, который записывает данные изображения, которые были сжаты схемой 114 сжатия, и схему 116 управления носителем, служащую интерфейсом с носителем 115 записи.
Свет, падающий на линзу 101 формирования изображения (свет объекта), падает на датчик 103 изображения после надлежащего экспонирования посредством апертуры 102 и преобразуется в электрический сигнал датчиком 103 изображения. Электрический сигнал света объекта, сформированный датчиком 103 изображения, преобразуется из аналогового сигнала изображения в цифровые данные изображения схемой 104 A/D преобразования.
Данные изображения, составленные сигналами, полученными от множества пикселей, и сформированные датчиком 103 изображения и схемой 104 A/D преобразования, вводятся в схему 105 обнаружения дефектного пикселя, которая обнаруживает сигнал дефектного пикселя, включенного в данные изображения. Сигнал, обнаруженный схемой 105 обнаружения дефектного пикселя как выходной сигнал от дефектного пикселя, вводится в схему 106 коррекции дефектного пикселя, которая корректирует сигнал путем интерполяции с обращением к сигналам от пикселей, находящихся вблизи пикселя, который был определен как дефектный.
Данные изображения, полученные схемой 106 коррекции дефектного пикселя, корректирующей сигнал, обнаруженный как выходной сигнал от дефектного пикселя, записываются на DRAM 108 с помощью схемы 107 управления памятью. Данные изображения, которые записываются на DRAM 108, считываются схемой 109 обработки изображения с помощью схемы 107 управления памятью.
В схеме 109 обработки изображения данные изображения, считанные с DRAM 108, подвергаются обработке цветового преобразования и обработке резкости и т.д. и преобразуются в данные изображения, включающие в себя сигнал яркости и цветоразностный сигнал. Данные изображения, обработанные схемой 109 обработки изображения, записываются на DRAM 108 с помощью схемы 107 управления памятью. Данные изображения, записанные на DRAM 108, считываются схемой 110 масштабирования с помощью схемы 107 управления памятью.
Схема 110 масштабирования изменяет увеличение данных изображения до, например, 720×240, чтобы отображать изображение, соответствующее данным изображения, на блоке 112 отображения. Данные изображения, увеличенные или уменьшенные схемой 110 масштабирования, записываются на DRAM 108 с помощью схемы 107 управления памятью. Данные изображения, записанные на DRAM 108, считываются схемой 113 модуляции видео с помощью схемы 107 управления памятью.
Схема 113 модуляции видео выполняет кодирование данных изображения. Данные изображения, обработанные схемой 109 обработки изображения, отображаются как изображение на блоке 112 отображения.
В том случае, когда данные записываются на носитель 115 записи, схема 110 масштабирования увеличивает или уменьшает размер данных изображения, которые были считаны с DRAM 108 (данные изображения, которые были считаны после обработки схемой 109 обработки изображения и записи на DRAM 108), до заданного размера. Данные изображения, увеличение которых было изменено схемой 110 масштабирования, записываются на DRAM 108 с помощью схемы 107 управления памятью. Данные изображения, которые записываются на DRAM 108, считываются схемой 114 сжатия с помощью схемы 107 управления памятью.
Схема 114 сжатия сжимает данные изображения, которые были считаны с DRAM 108, с помощью такого способа сжатия, как JPEG. Данные изображения, сжатые схемой 114 сжатия, записываются на DRAM 108 с помощью схемы 107 управления памятью и затем считываются схемой 116 управления носителем. Схема 116 управления носителем записывает данные изображения, сжатые схемой 114 сжатия, на носитель 115 записи.
Со ссылкой на фиг.2 подробно описана схема 105 обнаружения дефектного пикселя, которая обнаруживает сигнал от дефектного пикселя в датчике 103 изображения, используя данные изображения, сформированные с помощью датчика 103 изображения и схемы 104 A/D преобразования. Как упомянуто выше, поскольку в датчике 103 изображения размещен массив цветовых фильтров Байера, данные изображения, сформированные датчиком 103 изображения и схемой 104 A/D преобразования, составляются из множества видов (три вида R, G и В) групп одноцветных пикселей. Следует отметить, что в настоящем варианте выполнения описание приводится с использованием в качестве примера того случая, когда дефектным пикселем (дефект мерцания) является один из пикселей G, взятый как интересующий пиксель.
Схема 105 обнаружения дефектного пикселя принимает входной сигнал оцифрованных данных изображения от схемы 104 A/D преобразования. Предполагается, что уровень сигнала каждого пикселя, включенного в данные изображения, представлен 8 битами. Схема 105 обнаружения дефектного пикселя включает в себя схему 201 вставки нулей, первую схему 202 фильтра нижних частот (LPF), вторую схему 203 LPF, третью схему 204 LPF и четвертую схему 205 LPF. Схема 105 обнаружения дефектного пикселя также включает в себя первую схему 206 фильтра верхних частот (HPF), вторую схему 207 HPF, третью схему 208 HPF и четвертую схему 209 HPF. Схема 105 обнаружения дефектного пикселя дополнительно включает в себя первую схему 210 абсолютного значения (ABS), вторую схему 211 ABS, третью схему 212 ABS и четвертую схему 213 ABS. Схема 105 обнаружения дефектного пикселя дополнительно включает в себя схему 214 формирования сигнала яркости, схему 215 определения дефекта, схему 216 определения порогового значения (первый блок определения), схему 217 определения корреляции (второй блок определения), умножитель 218 и селектор 219.
Схема 201 вставки нулей, как показано на фиг.3A, вставляет нулевое значение (0) в уровни сигналов пикселей, отличных от пикселей G (пикселей, имеющих цвета, отличные от цвета интересующего пикселя) в области, составленной множеством пикселей, сконцентрированных на интересующем пикселе.
Первая схема 202 LPF, как показано на фиг.3B, выполняет обработку фильтра нижних частот в вертикальном направлении (например, обработку фильтра нижних частот с использованием коэффициента фильтра (1, 2, 1)) данных изображения, в которых нулевое значение было вставлено в уровни сигналов пикселей, отличных от пикселей G. Вследствие этого уровни сигналов пикселей, имеющих нулевое значение, интерполируются уровнями сигналов своих соответствующих вертикальных пикселей.
Вторая схема 203 LPF, как показано на фиг.3C, выполняет обработку LPF в горизонтальном направлении на данных изображения, в которых нулевое значение было вставлено в уровни сигналов пикселей, отличных от пикселей G. Вследствие этого уровни сигналов пикселей, имеющих нулевое значение, интерполируются уровнями сигналов своих соответствующих горизонтальных пикселей.
Третья схема 204 LPF, как показано на фиг.3D, выполняет обработку LPF в 135-градусном направлении на данных изображения, в которых нулевое значение было вставлено в уровни сигналов пикселей, отличных от пикселей G. Вследствие этого уровни сигналов пикселей, имеющих нулевое значение, интерполируются уровнями сигналов своих соответствующих пикселей, расположенных в 135-градусном направлении.
Четвертая схема 205 LPF, как показано на фиг.3E, выполняет обработку LPF в 45-градусном направлении на данных изображения, в которых нулевое значение было вставлено в уровни сигналов пикселей, отличных от пикселей G. Вследствие этого уровни сигналов пикселей, имеющих нулевое значение, интерполируются уровнями сигналов своих соответствующих пикселей, расположенных в 45-градусном направлении.
Первая схема 206 HPF, как показано на фиг.3F, выполняет обработку фильтра верхних частот в горизонтальном направлении (например, обработку фильтра верхних частот с использованием коэффициента фильтра (-1, 2, -1) на результате (выходных данных) обработки LPF, выполненной первой схемой 202 LPF.
Вторая схема 207 HPF, как показано на фиг.3G, выполняет обработку фильтра верхних частот в вертикальном направлении на результате (выходных данных) обработки LPF, выполненной схемой 203 второго LPF.
Третья схема 208 HPF, как показано на фиг.3H, выполняет обработку фильтра верхних частот в 45-градусном направлении на результате (выходных данных) обработки LPF, выполненной третьей схемой 204 LPF.
Четвертая схема 209 HPF, как показано на фиг.3I, выполняет обработку фильтра верхних частот в 135-градусном направлении на результате (выходных данных) обработки LPF, выполненной четвертой схемой 205 LPF.
В этом случае схема 105 обнаружения дефектного пикселя, первая схема 203 LPF и первая схема 206 HPF составляют модуль обработки для осуществления обработки фильтра в разных направлениях, используя интересующий пиксель в качестве эталона. Аналогичным образом вторая схема 203 LPF и вторая схема 207 HPF, третья схема 204 LPF и третья схема 208 HPF и четвертая схема 205 LPF и четвертая схема 209 HPF также соответственно составляют модули обработки для осуществления обработки фильтра. Следует отметить, что направление обработки LPF (первое направление) и направление обработки HPF (второе направление, ортогональное первому) различаются для каждого из модулей обработки.
Первая схема 210 ABS выводит 8-битное абсолютное значение результата (выходных данных) обработки HPF, осуществленной схемой 206 первого HPF. Аналогичным образом вторая схема 211 ABS, третья схема 212 ABS и четвертая схема 213 ABS выводят 8-битные абсолютные значения результатов (выходных данных) обработки HPF, осуществленной второй схемой 207 HPF, третьей схемой 208 HPF и четвертой схемой 209 HPF соответственно. Абсолютные значения результатов обработки HPF, выполняемой первой-четвертой схемами 206-209 HPF, относятся соответственно к HA1, HA2, HA3 и HA4.
Схема 214 формирования сигнала яркости формирует сигнал яркости из данных изображения, введенных в схему 105 обнаружения дефектного пикселя (данные изображения, составленные из R, G и В массива Байера). К примеру, схема 214 формирования сигнала яркости формирует сигнал яркости Y в соответствии с уравнением 1, представленным ниже.

Схема 215 определения дефекта выводит флаг дефекта, показывающий, является ли сигнал от интересующего пикселя сигналом дефектного пикселя, в соответствии со знаком (плюс или минус) результатов обработки HPF, осуществленной первой-четвертой схемами 206-209 HPF. Схема 215 определения дефекта также выводит черно-белый флаг, показывающий, является ли дефектный пиксель белым дефектом или же черным дефектом. Здесь «белый дефект» относится к дефектному пикселю, который в темноте выглядит ярким, и «черный дефект» относится к дефектному пикселю, который кажется черным под падающим светом.
В частности, в том случае, когда все результаты обработки HPF, осуществленной первой-четвертой схемами 206-209 HPF, имеют одинаковый знак, схема 215 определения дефекта выводит флаг 1 в качестве флага дефекта (1 бит). Это обозначает, что сигнал от интересующего пикселя является сигналом дефектного пикселя. С другой стороны, в том случае, когда какой-либо из результатов обработки HPF, осуществленной первой-четвертой схемами 206-209 HPF, имеет отличный от других знак, схема 215 определения дефекта выводит флаг «0» в качестве флага дефекта. Это обозначает, что сигнал от интересующего пикселя не является сигналом дефектного пикселя. Следует отметить, что флаг дефекта используется как сигнал выбора селектора 219.
В том случае, когда результаты обработки HPF, выполненной первой-четвертой схемами 206-209 HPF, имеют знак «плюс», схема 215 определения дефекта выводит флаг 1, указывающий белый дефект, как черно-белый флаг (1 бит). С другой стороны, в том случае, когда результаты обработки HPF, осуществленной первой-четвертой схемами 206-209 HPF, имеют знак «минус», схема 215 определения дефекта выводит флаг 0, указывающий черный дефект, как черно-белый флаг. Этот черно-белый флаг необходим не всегда и может быть пропущен. Следует отметить, что черно-белый флаг выводится к схеме 216 определения порогового значения.
Схема 216 определения порогового значения сравнивает абсолютные значения с HA1 по HA4 результатов обработки HPF, которые были введены от первой-четвертой схем 210-213 ABS соответственно, с произвольно установленным пороговым значением. Основываясь на результатах сравнения, схема 216 определения порогового значения выводит первое значение определения D1, которое является значением, указывающим на вероятность того, что сигнал от интересующего пикселя является сигналом дефектного пикселя.
Фиг.4 представляет собой блок-схему, показывающую конфигурацию схемы 216 определения порогового значения. Схема 216 определения порогового значения включает в себя первую схему 401 формирования уровня дефекта, вторую схему 402 формирования уровня дефекта, третью схему 403 формирования уровня дефекта, четвертую схему 404 формирования уровня дефекта и умножители с 405 по 407.
Первая схема 401 формирования уровня дефекта формирует (вычисляет) уровень дефекта DL1, основываясь на абсолютном значении НА1 результата обработки HPF (обработки горизонтального фильтра), которое было введено от первой схемы 210 ABS. Вторая схема 402 формирования уровня дефекта формирует (вычисляет) уровень дефекта DL2, основываясь на абсолютном значении HA2 результата обработки HPF (обработки вертикального фильтра), которое было введено от второй схемы 211 ABS. Третья схема 4 03 формирования уровня дефекта формирует (вычисляет) уровень дефекта DL3, основываясь на абсолютном значении HA3 результата обработки HPF (обработки 45-градусного фильтра), которое было введено от третьей схемы 212 ABS. Четвертая схема 404 формирования уровня дефекта формирует (вычисляет) уровень дефекта DL4, основываясь на абсолютном значении HA4 результата обработки HPF (обработки 135-градусного фильтра), которое было введено от четвертой схемы 213 ABS. Предполагается, что каждое из этих абсолютных значений HA1-HA4 результатов обработки HPF представлено 8-битным значением.
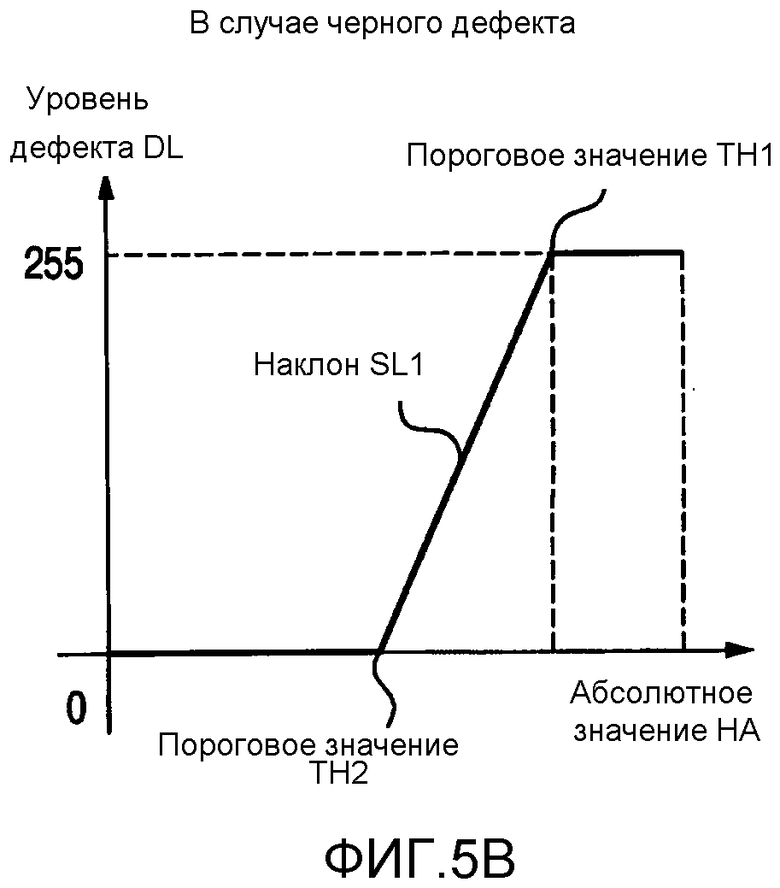
Конкретное описание формирования уровня дефекта, осуществляемого первой-четвертой схемами 401-404 формирования уровня дефекта, дается со ссылкой на фиг.5A и 5B. Следует отметить, что термин «уровень дефекта», использованный в настоящем документе, относится к значению, указывающему вероятность того, что сигнал от интересующего пикселя является сигналом дефектного пикселя. В настоящем варианте выполнения уровень дефекта формируется как значение в диапазоне от 0 до 255, причем уровень дефекта «0» обозначает, что сигнал от интересующего пикселя не является сигналом дефектного пикселя. И наоборот, уровень дефекта «255» обозначает, что сигнал от интересующего пикселя является сигналом дефектного пикселя. Чем уровень дефекта ближе к «0», тем выше вероятность того, что сигнал от интересующего пикселя не является сигналом дефектного пикселя, тогда как чем уровень дефекта ближе к «255», тем выше вероятность того, что сигнал от интересующего пикселя является сигналом дефектного пикселя.
Фиг.5A и фиг.5B демонстрируют зависимость между абсолютным значением результата обработки HPF, которое введено в первую-четвертую схемы 401-404 формирования уровня дефекта, и уровнем дефекта (значением), сформированным первой-четвертой схемами 401-404 формирования уровня дефекта. На фиг.5А и фиг.5В горизонтальная ось обозначает абсолютное значение HA (HA1-HA4) как результат обработки HPF, и вертикальная ось обозначает уровень дефекта DL (DL1-DL4).
Первая-четвертая схемы 401-404 формирования уровня дефекта заблаговременно фиксируют пороговое значение ТН2, показанное на фиг.5A и 5B, и значение наклона SL1. Первая-четвертая схемы 401-404 формирования уровня дефекта преобразуют абсолютное значение НА результата обработки HPF в уровень дефекта DL (8 бит) в соответствии с уравнениями 2-4, представленными ниже.
В случае, когда 
В случае, когда 
В случае, когда 
Здесь ТН1=ТН2+(255/SL1).
Например, в показанных на фиг.5A и 5B примерах, если входное абсолютное значение НА результата обработки HPF больше или равно пороговому значению, первая-четвертая схемы 401-404 формирования уровня дефекта формируют уровень дефекта DL со значением «255». С другой стороны, если входное абсолютное значение НА результата обработки HPF меньше или равно пороговому значению ТН2, первая-четвертая схемы 401-404 формирования уровня дефекта формируют уровень дефекта DL со значением «0». Если входное абсолютное значение НА результата обработки HPF больше, чем пороговое значение TH2, и меньше, чем пороговое значение TH1, первая-четвертая схемы 401-404 формирования уровня дефекта формируют уровень дефекта DL с таким значением, которое возрастает по мере увеличения входного абсолютного значения НА результата обработки HPF.
Следует отметить, что первая-четвертая схемы 401-404 формирования уровня дефекта изменяют пороговое значение TH1 и наклон SL1 в соответствии с черно-белым флагом, введенным от схемы 215 определения дефекта, то есть в зависимости от того, является ли дефектный пиксель белым дефектом или черным дефектом. К примеру, когда дефектный пиксель - это белый дефект, первая-четвертая схемы 401-404 формирования уровня дефекта устанавливают пороговое значение TH2 и наклон SL1 таким образом, что они имеют характеристики, показанные на фиг.5А, а если дефектный пиксель - это черный дефект, первая-четвертая схемы 401-404 формирования уровня дефекта устанавливают пороговое значение ТН2 и наклон SL1 таким образом, что они имеют характеристики, показанные на фиг.5B.
Предполагается, что пороговое значение TH2 - это значение, полученное путем умножения произвольно установленного значения, которое определяется, например, рабочим режимом устройства 100 формирования изображения и среднего значения сигналов яркости пикселей вблизи интересующего пикселя, сформированных схемой 214 формирования сигнала яркости. Пороговое значение TH2 нуждается в изменении в соответствии с сигналами яркости, формируемыми схемой 214 формирования сигнала яркости (то есть количеством шума), поскольку чем выше яркость, тем больше шум. При увеличении порогового значения TH2 с увеличением яркости возможно предотвратить ошибочное принятие шума за дефектный пиксель. Кроме того, предполагается, что наклон SL1 также является значением, полученным путем умножения произвольно установленного значения, которое определяется, например, рабочим режимом устройства 100 формирования изображения, и сигналами яркости, формируемыми схемой 214 формирования сигнала яркости. Пороговое значение TH1 определяется путем определения порогового значения TH2 и наклона SL1. Следует отметить, что уровень дефекта DL относительно абсолютного значения НА, как показано на фиг.5A и фиг.5B, может быть предварительно сохранен в таблице вместо получения путем преобразования с использованием уравнений 2-4.
В качестве альтернативы, вместо установки пороговых значений TH1 и TH2, соотношение между абсолютным значением HA и уровнем дефекта DL может быть определено как функция (такая как кубическая функция), в которой уровень дефекта DL возрастает по мере увеличения абсолютного значения НА, во всем диапазоне абсолютного значения НА. Затем эта функция может быть переключена в соответствии с яркостью, так что значение уровня дефекта DL относительно абсолютного значения НА уменьшается по мере увеличения яркости пикселей вблизи интересующего пикселя.
Умножитель 405 получает 16-битное значение путем умножения уровня дефекта, сформированного первой схемой 401 формирования уровня дефекта, и уровня дефекта, сформированного второй схемой 402 формирования уровня дефекта, выполняет процедуру 8-битного сдвига над 16-битным значением и выводит полученное 8-битное значение как уровень дефекта DL5. Умножитель 406 получает 16-битное значение путем умножения уровня дефекта, сформированного третьей схемой 403 формирования уровня дефекта, и уровня дефекта, сформированного четвертой схемой 404 формирования уровня дефекта, выполняет процедуру 8-битного сдвига над 16-битным значением и выводит полученное 8-битное значение как уровень дефекта DL6. Умножитель 407 получает 16-битное значение путем умножения уровня дефекта DL5, полученного посредством умножения умножителем 405, и уровня дефекта DL6, полученного посредством умножения умножителем 406, выполняет процедуру 8-битного сдвига над 16-битным значением и выводит полученное 8-битное значение как первое значение определения D1.
Таким образом, схема 216 определения порогового значения получает, основываясь на результатах обработки фильтра, разность уровней сигнала между интересующим пикселем и множеством пикселей, расположенных поблизости от интересующего пикселя. Затем схема 216 определения порогового значения формирует первое значение определения D1, указывающее, что чем больше разность, тем выше вероятность того, что сигнал от интересующего пикселя является сигналом дефектного пикселя.
Возвращаясь к фиг.2, следует отметить, что схема 217 определения корреляции сравнивает величины абсолютных значений HA1-HA4 результатов обработки HPF, которые были введены соответственно от первой-четвертой схем 210-213 ABS. Основываясь на результатах сравнения, схема 217 определения корреляции выводит второе значение определения D2, указывающее вероятность того, что сигнал от интересующего пикселя является сигналом дефектного пикселя.
Фиг.6 представляет собой блок-схему, показывающую конфигурацию схемы 217 определения корреляции. Схема 217 определения корреляции включает в себя первую схему 601 выбора, вторую схему 602 выбора, третью схему 603 выбора, четвертую схему 604 выбора, пятую схему 605 выбора, шестую схему 606 выбора, вычитатель 607 и схему 608 определения уровня дефекта.
Первая схема 601 выбора сравнивает абсолютное значение HA1 результата обработки HPF, которое было введено от первой схемы 210 ABS, и абсолютное значение HA2 результата обработки HPF, которое было введено от второй схемы 211 ABS, и выводит большее абсолютное значение. Вторая схема 602 выбора сравнивает абсолютное значение HA1 результата обработки HPF, которое было введено от первой схемы 210 ABS, и абсолютное значение HA2 результата обработки HPF, которое было введено от второй схемы 211 ABS, и выводит меньшее абсолютное значение.
Третья схема 603 выбора сравнивает абсолютное значение HA3 результата обработки HPF, которое было введено от третьей схемы 212 ABS, и абсолютное значение HA4 результата обработки HPF, которое было введено от четвертой схемы 213 ABS, и выводит большее абсолютное значение. Четвертая схема 604 выбора сравнивает абсолютное значение HA3 результата обработки HPF, которое было введено от третьей схемы 212 ABS, и абсолютное значение HA4 результата обработки HPF, которое было введено от четвертой схемы 213 ABS, и выводит меньшее абсолютное значение.
Пятая схема 605 выбора сравнивает абсолютное значение, выведенное от первой схемы 601 выбора, и абсолютное значение, выведенное от третьей схемы 603 выбора, и выводит большее абсолютное значение. Абсолютное значение, выведенное от пятой схемы 605 выбора, является максимальным абсолютным значением среди результатов обработки HPF, выполненной первой-четвертой схемами 210-213 ABS (то есть среди результатов обработки фильтра, выполненной в четырех направлениях).
Шестая схема 606 выбора сравнивает абсолютное значение, выведенное от второй схемы 602 выбора, и абсолютное значение, выведенное от четвертой схемы 604 выбора, и выводит меньшее абсолютное значение. Абсолютное значение, выведенное от шестой схемы 606 выбора, является минимальным абсолютным значением среди результатов обработки HPF, выполненной первой-четвертой схемами 210-213 ABS (то есть среди результатов обработки фильтра, выполненной в четырех направлениях).
Вычитатель 607 вычитает абсолютное значение, выведенное от шестой схемы 606 выбора, из абсолютного значения, выведенного от пятой схемы 605 выбора. Результат вычитания, выполненного вычитателем 607, обозначает максимальную разность (ширину распределения разности) среди результатов обработки HPF, выполненной первой-четвертой схемами 210-213 ABS, и всегда будет положительным значением, большим или равным нулю, потому что получается путем вычитания минимального абсолютного значения из максимального абсолютного значения.
Схема 608 определения уровня дефекта формирует (вычисляет) второе значение определения D2, основываясь на абсолютном значении, выведенном от вычитателя 607, и выводит второе значение определения D2. Формирование второго значения определения D2, полученного схемой 608 определения уровня дефекта, конкретно описано со ссылкой на фиг.7. Следует отметить, что как и первое значение определения D1, второе значение определения D2, сформированное схемой 608 определения уровня дефекта, указывает вероятность того, что сигнал от интересующего пикселя является сигналом дефектного пикселя. Фиг.7 представляет собой график, показывающий зависимость между результатом вычитания, выполняемого вычитателем 607 (абсолютное значение НВ), который должен быть введен в схему 608 определения уровня дефекта, и вторым значением определения D2, сформированным схемой 608 определения уровня дефекта. На фиг.7 горизонтальная ось обозначает результат вычитания, выполняемого вычитателем 607 (абсолютное значение НВ), и вертикальная ось обозначает второе значение определения D2.
Схема 608 определения уровня дефекта заранее сохраняет пороговое значение ТН3 и значение наклона SL2, как показано на фиг.7, и преобразует результат вычитания вычитателя 607 во второе значение определения D2 (8 бит) в соответствии с уравнениями 5-7, представленными ниже.
В том случае, если HB≤TH3,

В том случае, если TH3≤HB≤TH4,

В том случае, если TH4≤HB,

К примеру, в показанном на фиг.7 примере, если результат HB вычитания вычитателем 607 меньше или равен пороговому значению TH3, схема 608 определения уровня дефекта формирует второе значение определения D2 «255». С другой стороны, если результат HB вычитания вычитателем 607 больше или равен пороговому значению TH4, схема 608 определения уровня дефекта формирует второе значение определения D2, равное 0. Если результат вычитания вычитателем 607 больше порогового значения TH3 и меньше порогового значения TH4, схема 608 определения уровня дефекта формирует второе значение определения D2 таким образом, что оно увеличивается по мере того, как результат вычитания вычитателем 607 (абсолютное значение) уменьшается.
Следует отметить, что пороговое значение TH3 представляет собой значение, полученное путем умножения произвольно установленного значения, которое определяется, например, режимом работы устройства 100 формирования изображения, и сигнала яркости, сформированного схемой 214 формирования сигнала яркости. Следует также отметить, что наклон SL2 также является значением, полученным путем умножения произвольно установленного значения, которое определяется, например, режимом работы устройства 100 формирования изображения, и сигнала яркости, сформированного схемой 214 формирования сигнала яркости. Пороговое значение TH4 определяется путем определения порогового значения ТН3 и значения наклона SL2. В качестве альтернативы, второе значение определения D2, зависящее от результата НВ вычитания вычитателем 607, как показано на фиг.7, может быть предварительно сохранено в таблице вместо получения с использованием уравнений 5-7.
Таким образом, схема 217 определения корреляции получает, основываясь на результатах обработки фильтра, ширину распределения разности уровней сигнала между интересующим пикселем и пикселями вблизи его (то есть результат вычитания НВ). Схема 217 определения корреляции затем формирует второе значение определения D2, указывающее, что чем меньше указанная выше ширина распределения разности, тем выше вероятность того, что сигнал от интересующего пикселя является сигналом дефектного пикселя.
Следует отметить, что в случае, если в данные изображения включено много шума, есть вероятность того, что схема 216 определения порогового значения может неправильно определить сигнал от интересующего пикселя как сигнал дефектного пикселя (то есть выход первого значения определения, составляющего 255) по причине шума. Ввиду этого в схеме 217 определения корреляции необходимо определить сигнал от интересующего пикселя так, чтобы он не был сигналом дефектного пикселя в том случае, если в данные изображения в области, включающей в себя интересующий пиксель, включено много шума и ширина распределения разности велика.
В том случае, если интересующий пиксель не является дефектным, результаты обработки HPF, полученные с помощью первой-четвертой схем 210-213 ABS (то есть результаты обработки фильтра, выполненные в четырех направлениях) будут иметь значение, близкое к нулю и соответственно ширина распределения разности также будет иметь значение, близкое к нулю. В таком случае схема 217 определения корреляции может неправильно определить сигнал от интересующего пикселя как сигнал дефектного пикселя (то есть выход первого значения определения, составляющего 255), поскольку ширина распределения разности невелика. По этой причине в схеме 216 определения порогового значения необходимо определить сигнал от интересующего пикселя как сигнал дефектного пикселя в том случае, если разность уровней сигнала между интересующим пикселем и соседними пикселями больше или равна пороговому значению.
Ввиду этого в настоящем варианте выполнения, как показано на фиг.2, умножитель 218 получает третье значение определения путем умножения первого значения определения D1, выведенного от схемы 216 определения порогового значения, и второго значения определения D2, выведенного от схемы 217 определения порогового значения. В частности, умножитель 218 получает 16-битное значение путем умножения первого значения определения D1 и второго значения определения D2, осуществляет процедуру 8-битного сдвига над 16-битным значением и выводит полученное 8-битное значение (то есть значение от 0 до 255) как третье значение определения К. Это позволяет схеме 217 определения корреляции надлежащим образом определять, является ли интересующий пиксель дефектным, даже если схема 216 определения порогового значения приняла ошибочное решение. Другими словами, и в схеме 216 определения порогового значения, и в схеме 217 определения корреляции, если интересующий пиксель был определен как дефектный, интересующий пиксель обнаруживается как дефектный. В качестве альтернативы и в схеме 216 определения порогового значения, и в схеме 217 определения корреляции, если было определено, что есть высокая вероятность того, что сигнал от интересующего пикселя является сигналом дефектного пикселя, сигнал от интересующего пикселя обнаруживается как сигнал, который с высокой вероятностью представляет собой сигнал дефектного пикселя.
Селектор 219 выводит третье значение определения К, полученное путем умножения с помощью умножителя 218, если флаг дефекта, введенный от схемы 215 определения дефекта, составляет «1» (то есть указывает, что интересующий пиксель является дефектным). Если флаг дефекта, введенный от схемы 215 определения дефекта, составляет 0 (то есть указывает, что интересующий пиксель не является дефектным), селектор 219 выводит «0» как третье значение определения. Следует отметить, что уровень дефекта, который выведен от селектора 219, вводится в схему 106 коррекции дефектного пикселя.
Фиг.8 представляет собой блок-схему, демонстрирующую конфигурацию схемы 106 коррекции дефектного пикселя. Схема 106 коррекции дефектного пикселя принимает входной сигнал данных изображения, включающих в себя дефектный пиксель, при помощи схемы 104 A/D преобразования. Схема 106 коррекции дефектного пикселя включает в себя схему 801 вычисления значения коррекции и схему 802 взвешенного сумматора.
Схема 801 вычисления значения коррекции выполняет, к примеру, обработку фильтра, используя коэффициент (например, (1, 0, 1)), который не обращается к интересующему пикселю, и рассчитывает значение коррекции для коррекции уровня сигнала дефектного пикселя. В качестве альтернативы схема 801 вычисления значения коррекции может определять граничное направление от данных изображения и рассчитывать значение коррекции со ссылкой на уровни сигналов пикселей, расположенных вдоль граничного направления интересующего пикселя, или получать значение коррекции путем предварительной интерполяции. В качестве другой альтернативы значение коррекции может быть получено путем назначения большего веса значению коррекции, рассчитанному исходя из уровней сигнала пикселей, расположенных вдоль граничного направления, чем вес значения коррекции, вычисленного исходя из уровней сигнала пикселей, расположенных вдоль других направлений, и суммирования и усреднения этих значений коррекции.
Схема 802 взвешенного сумматора взвешивает и суммирует уровень ORG сигнала интересующего пикселя, выведенного из схемы 104 A/D преобразования, и значение COR коррекции, рассчитанное схемой 801 вычисления значения коррекции в соответствии с третьим значением определения К, выведенным от схемы 105 обнаружения дефектного пикселя. Например, схема 802 взвешенного сумматора выводит скорректированный уровень OUT сигнала интересующего пикселя в соответствии с уравнением 8, представленным ниже.

Как указано выше, третье значение определения К варьируется от 0 до 255. Когда третье значение определения К становится близко к нулю, в случае если существует высокая вероятность того, интересующий пиксель не является дефектным (то есть интересующий пиксель является нормальным пикселем), схема 802 взвешенного сумматора выводит уровень OUT сигнала (то есть данные изображения, в которых дефектный пиксель был откорректирован) путем назначения большого веса уровню ORG сигнала интересующего пикселя и суммирования взвешенного уровня ORG сигнала и значения C0R коррекции. С другой стороны, когда третье значение определения К становится близко к «255», в случае если существует высокая вероятность того, что интересующий пиксель является дефектным, схема 802 взвешенного сумматора выводит уровень OUT сигнала путем назначения большого веса значению COR коррекции интересующего пикселя и суммирования взвешенного значения COR коррекции и уровня ORG сигнала интересующего пикселя. В качестве альтернативы третье значение определения К может сравниваться с предопределенным пороговым значением, и если третье значение определения К меньше порогового значения, то выводится уровень ORG сигнала интересующего пикселя как скорректированный уровень OUT сигнала, и иначе выводится значение, полученное в соответствии с уравнением 8 как скорректированный уровень OUT сигнала.
В соответствии с настоящим вариантом выполнения, как описано выше, и в схеме 216 определения порогового значения, и в схеме 217 определения корреляции интересующий пиксель обнаруживается как дефектный пиксель в том случае, если сигнал от интересующего пикселя был определен как сигнал дефектного пикселя. В качестве альтернативы, как в схеме 216 определения порогового значения, так и в схеме 217 определения корреляции в том случае, если было определено, что существует высокая вероятность того, что сигнал от интересующего пикселя является сигналом дефектного пикселя, уровень сигнала интересующего пикселя обнаруживается как уровень сигнала, который с высокой вероятностью представляет собой сигнал дефектного пикселя. По этой причине дефектный пиксель может быть обнаружен с более высокой точностью, чем при использовании традиционных методов. Кроме того, дефектный пиксель может быть скорректирован с более высокой точностью, чем при использовании традиционных методов, потому что уровень сигнала интересующего пикселя корректируется в соответствии со значением, полученным путем умножения уровня дефекта, выведенного от схемы 216 определения порогового значения, и уровня дефекта, выведенного от схемы 217 определения корреляции.
Следует отметить, что в схеме 105 обнаружения дефектного пикселя, как показано на фиг.9, первая схема 202 LPF и вторая схема 203 LPF, каждая, могут быть снабжены двумя схемами фильтра верхних частот, каждая из которых выполняет различную обработку фильтра верхних частот.
Со ссылкой на фиг.9, пятая схема 901 HPF и шестая схема 902 HPF, каждая, выполняет различную обработку фильтра верхних частот в горизонтальном направлении над результатом обработки LPF, выполненной первой схемой 202 LPF. Например, как показано на фиг.10A, пятая схема 901 HPF осуществляет обработку фильтра верхних частот с использованием коэффициента фильтра нижних частот ((1, 2, 1) × ( 1, 2, 1), × (-1, 2, -1)) (первую обработку фильтра верхних частот с использованием первого фильтра верхних частот). Шестая схема 902 HPF, как показано на фиг.10 В, выполняет обработку фильтра верхних частот с использованием коэффициента фильтра верхних частот ((1, 2, 1) × (-1, 2, -1), × (-1, 2, -1)) (вторую обработку фильтра верхних частот с использованием второго фильтра верхних частот).
Седьмая схема 903 HPF и восьмая схема 904 HPF, каждая, осуществляют различную обработку фильтра верхних частот в вертикальном направлении над результатом обработки LPF, выполненной второй схемой 203 LPF. Например, седьмая схема 903 HPF осуществляет обработку фильтра верхних частот с использованием коэффициента фильтра нижних частот (см. фиг.10A). Восьмая схема 904 HPF выполняет обработку фильтра верхних частот с использованием коэффициента фильтра верхних частот (см. фиг.10B).
Пятая схема 905 ABS выводит абсолютное значение результата (выходных данных) обработки HPF, выполненной пятой схемой 901 HPF. Подобным образом шестая схема 906 ABS, седьмая схема 9 07 ABS и восьмая схема 908 ABS выводят абсолютные значения результатов (выходных данных) обработки HPF, выполненной, соответственно, шестой схемой 902 HPF, седьмой схемой 903 HPF и восьмой схемой 904 HPF.
Первая арифметическая схема 909 и вторая арифметическая схема 910 имеют одинаковую конфигурацию, каждая из них включает в себя схему 216 определения порогового значения, схему 217 определения корреляции и умножитель 218. Первая арифметическая схема 909 принимает входной сигнал абсолютных значений результатов обработки HPF, полученных с помощью пятой схемы 905 ABS, седьмой схемы 907 ABS, третьей схемы 212 ABS и четвертой схемы 213 ABS. Вторая арифметическая схема 910 принимает входной сигнал абсолютных значений результатов обработки HPF, полученных с помощью шестой схемы 906 ABS, восьмой схемы 908 ABS, третьей схемы 212 ABS и четвертой схемы 213 ABS.
Первая арифметическая схема 909 и вторая арифметическая схема 910, каждая, получают значение определения, указывающее вероятность того, что сигнал от интересующего пикселя является сигналом дефектного пикселя, используя абсолютные значения результатов обработки HPF, выполненной в той же полосе. Следует отметить, что идеальным вариантом является использование одинаковой полосы для всех направлений, включая горизонтальное направление, вертикальное направление, 45-градусное направление и 135-градусное направление. В настоящем варианте выполнения между горизонтальным и вертикальным направлениями и 45-градусным и 135-градусным направлениями (наклонными направлениями) используются разные коэффициенты фильтра, потому что расстояние от интересующего пикселя до указанного пикселя разнится между наклонными направлениями и горизонтальным и вертикальным направлениями, и по этой причине диапазон частот между ними различен.
Схема 911 выбора максимального значения сравнивает значение определения, выведенное от первой арифметической схемы 909, и значение определения, выведенное от второй арифметической схемы 910, и выводит большее значение определения.
Если обработка фильтра выполняется в диапазонах высоких частот на данных изображения (см. фиг.10B), бывают случаи, когда граница остается и соответственно сигнал от интересующего пикселя ошибочно определяется как сигнал дефектного пикселя. По этой причине обработка фильтра также выполняется в диапазонах низких частот, для того чтобы достоверно обнаружить дефектный пиксель, существующий в диапазонах нижних частот. Затем для такого дефектного пикселя, который существует на границе, результат обработки фильтра верхних частот и результат обработки фильтра нижних частот сравнивают с целью предотвращения ошибочного определения границы как дефектного пикселя.
В настоящем варианте выполнения, хотя случай, когда дефектный пиксель обнаруживается среди пикселей G, и был описан в качестве примера, даже если дефектный пиксель обнаруживается среди пикселей R или В, возможно обнаружить дефектный пиксель с помощью аналогичной обработки путем вставки нулевого значения в пиксели, отличные от R или В пикселей.
Схема 216 определения порогового значения и схема 217 определения корреляции могут получать первое и второе значения определения, используя сигнал Y яркости, полученный из уравнения 1, вместо получения первого и второго значений определения путем распознавания среди пикселей G, R и В.
Абсолютное значение НА, используемое схемой 216 определения порогового значения для получения первого значения определения D1, может быть получено и другим способом, пока оно указывает величину разности уровней сигнала между интересующим пикселем и множеством пикселей, расположенных поблизости от интересующего пикселя. К примеру, схема 216 определения порогового значения может получать среднее значение абсолютных значений результатов обработки HPF, выполненной первой-четвертой схемами 210-213 ABS, и получать первое значение определения D1 из уравнений 2-4, используя среднее значение как абсолютное значение НА.
Также схема 217 определения корреляции может получать дисперсию абсолютных значений результатов обработки HPF, выполненной первой-четвертой схемами 210-213 ABS, и устанавливать значение определения D2 на большее значение по мере уменьшения этой дисперсии.
Следует отметить, что хотя схема 105 обнаружения дефектного пикселя конфигурируется схемами LPF и схемами HPF на фиг.2, также возможна конфигурация, в которую не включается схема LPF, как показано на фиг.11. Далее приведено описание другой конфигурации схемы 105 обнаружения дефектного пикселя, изображенной на фиг.11, с фокусировкой на отличиях в конфигурации от схемы 105 обнаружения дефектного пикселя, продемонстрированной на фиг.2.
Первая схема 1101 HPF выполняет обработку HPF с использованием коэффициента фильтра (-1, 0, 2, 0, -1), к примеру, в горизонтальном направлении на данных изображения, в которых в уровни сигналов пикселей, отличных от пикселей G, было вставлено нулевое значение. Подобным образом первая схема 1101 HPF также выполняет обработку HPF на данных изображения, в которых было вставлено нулевое значение в уровни сигналов пикселей, отличных от пикселей R, и на данных изображения, в которых было вставлено нулевое значение в уровни сигналов пикселей, отличных от пикселей В.
Вторая схема 1102 HPF выполняет обработку HPF с использованием коэффициента фильтра (-1, 0, 2, 0, -1), к примеру, в вертикальном направлении на данных изображения, в которых в уровни сигналов пикселей, отличных от пикселей G, было вставлено нулевое значение. Подобным образом вторая схема 1102 HPF также выполняет обработку HPF на данных изображения, в которых было вставлено нулевое значение в уровни сигналов пикселей, отличных от пикселей R, и на данных изображения, в которых было вставлено нулевое значение в уровни сигналов пикселей, отличных от пикселей В.
Третья схема 1103 HPF выполняет обработку HPF с использованием коэффициента фильтра (-1, 2, -1), к примеру, в 45-градусном направлении на данных изображения, в которых в уровни сигналов пикселей, отличных от пикселей G, было вставлено нулевое значение.
Четвертая схема 1104 HPF выполняет обработку HPF с использованием коэффициента фильтра (-1, 2, -1), к примеру, в 135-градусном направлении на данных изображения, в которых в уровни сигналов пикселей, отличных от пикселей G, было вставлено нулевое значение.
При конфигурации схемы 105 обнаружения дефектного пикселя, показанной на фиг.11, схема 201 вставки нулей не выполняет обработки интерполяции на пикселях, в которые было вставлено нулевое значение, и вследствие этого каждая из схем HPF имеет коэффициент фильтра, который не подвержен влиянию пикселей, в которые было вставлено нулевое значение во время обработки HPF. Как в горизонтальном, так и в вертикальном направлениях может быть использован одинаковый коэффициент фильтра для пикселей G, R и В, потому что все пиксели G, R и В расположены через один. С другой стороны, как в 45-градусном, так и в 135-градусном направлениях только пиксели G являются объектами для обработки HPF, потому что пиксели G расположены последовательно, тогда как и пиксели R, и пиксели В расположены через один.
Первая-четвертая схемы 1105-1108 ABS выводят абсолютные значения (выходные данные) результатов обработки HPF, осуществленной соответственно первой-четвертой схемами 1101-1104 HPF.
Подобно схеме 215 определения дефекта, показанной на фиг.2, схема 1109 определения дефекта выводит флаг дефекта и черно-белый флаг в соответствии со знаком (плюс или минус) результатов обработки HPF, осуществленной первой-четвертой схемами 1101-1104 HPF. Если интересующий пиксель является пикселем G, схема 1109 определения дефекта обращается к знакам результатов обработки HPF, осуществленной первой схемой 1101 первого HPF, второй схемой 1102 HPF, третьей схемой 1103 HPF и четвертой схемой 1104 HPF. Если интересующий пиксель является пикселем R или В, схема 1109 определения дефекта обращается к знакам результатов обработки HPF, осуществленной первой схемой 1101 HPF и второй схемой 1102 HPF.
Подобно схеме 216 определения порогового значения, показанной на фиг.2, схема 1110 определения порогового значения сравнивает абсолютные значения результатов обработки HPF, которые были введены от первой-четвертой схем 1105-1108 ABS, с произвольно установленным пороговым значением. Основываясь на результатах сравнения, схема 1110 определения порогового значения выводит первое значение определения D1, которое является значением, указывающим вероятность того, что сигнал от интересующего пикселя является сигналом дефектного пикселя. Подобно схеме 217 определения корреляции, показанной на фиг.2, схема 1111 определения корреляции сравнивает величины абсолютных значений результатов обработки HPF, которые были введены соответственно от первой-четвертой схем 1105-1108 ABS. Основываясь на результатах сравнения, схема 1111 определения корреляции выводит второе значение определения D2, указывающее вероятность того, что сигнал от интересующего пикселя является сигналом дефектного пикселя.
Если интересующий пиксель является пикселем G, схема 1110 определения порогового значения и схема 1111 определения корреляции обращается к абсолютным значениям результатов обработки HPF, полученным с помощью первой схемы 1105 7ABS, второй схемы 1106 ABS, третьей схемы 1107 ABS и четвертой схемы 1108 7ABS. Если интересующий пиксель является пикселем R или В, схема 1110 определения порогового значения и схема 1111 определения корреляции обращается к абсолютным значениям результатов обработки HPF, полученным с помощью первой схемы 1105 7ABS и второй схемы 1106 ABS.
Затем, как и в случае фиг.2, умножитель 218 получает третье значение определения путем умножения первого значения определения и второго значения определения, и третье значение определения вводится в схему 106 коррекции дефектного пикселя с помощью селектора 219.
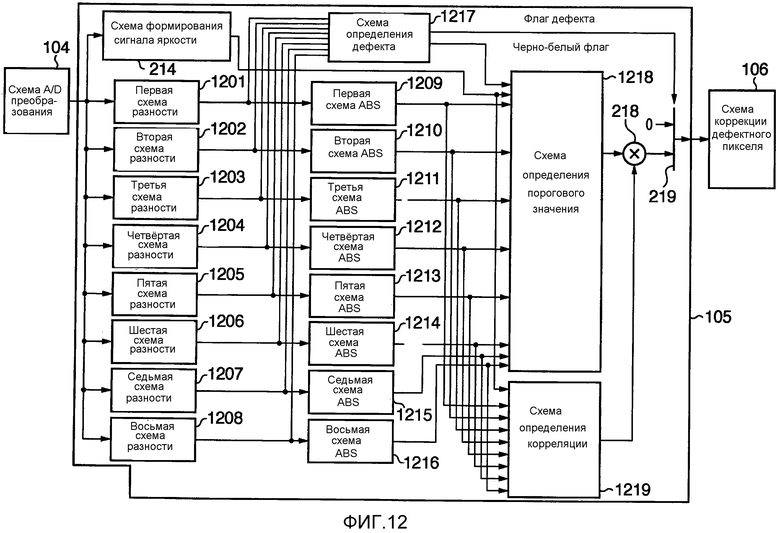
Кроме того, также возможна конфигурация, в которой схема 105 обнаружения дефектного пикселя конфигурируется схемами разности, как показано на фиг.12, вместо схем фильтра, таких как схемы LPF и схемы HPF, изображенные на фиг.2. Следующее описание касается конфигурации схемы 105 обнаружения дефектного пикселя, продемонстрированного на фиг.12, с фокусировкой на его отличиях в конфигурации от схемы 105 обнаружения дефектного пикселя, изображенного на фиг.2.
Первая схема 1201 разности осуществляет обработку разности для получения значения путем вычитания из значения интересующего пикселя значения второго пикселя, расположенного справа от интересующего пикселя и имеющего тот же цвет, что и интересующий пиксель. Вторая схема 1202 разности выполняет обработку разности для получения значения путем вычитания из значения интересующего пикселя значения второго пикселя, расположенного слева от интересующего пикселя и имеющего тот же цвет, что и интересующий пиксель.
Третья схема 1203 разности осуществляет обработку разности для получения значения путем вычитания из значения интересующего пикселя значения второго пикселя, расположенного сверху от интересующего пикселя и имеющего тот же цвет, что и интересующий пиксель. Четвертая схема 1204 разности выполняет обработку разности для получения значения путем вычитания из значения интересующего пикселя значения второго пикселя, расположенного снизу от интересующего пикселя и имеющего тот же цвет, что и интересующий пиксель.
Пятая схема 1205 разности осуществляет обработку разности для получения значения путем вычитания из значения интересующего пикселя значения смежного пикселя, расположенного справа сверху от интересующего пикселя и имеющего тот же цвет, что и интересующий пиксель. Шестая схема 1206 разности выполняет обработку разности для получения значения путем вычитания из значения интересующего пикселя значения смежного пикселя, расположенного слева снизу от интересующего пикселя и имеющего тот же цвет, что и интересующий пиксель.
Седьмая схема 1207 разности осуществляет обработку разности для получения значения путем вычитания из значения интересующего пикселя значения смежного пикселя, расположенного слева сверху от интересующего пикселя и имеющего тот же цвет, что и интересующий пиксель. Восьмая схема 1208 разности выполняет обработку разности для получения значения путем вычитания из значения интересующего пикселя значения смежного пикселя, расположенного справа снизу от интересующего пикселя и имеющего тот же цвет, что и интересующий пиксель.
Таким образом, каждая из первой-восьмой схем 1201-1208 разности получает разность в значении между интересующим пикселем и пикселем, расположенным поблизости от интересующего пикселя. Хотя первая-четвертая схемы 1201-1204 разности осуществляют обработку разности вне зависимости от того, является ли интересующий пиксель пикселем G, R или В, пятая-восьмая схемы 1205-1208 разности производят обработку разности только в том случае, если интересующий пиксель является пикселем G.
Первая-восьмая схемы 1209-1216 ABS выводят абсолютные значения результатов (выходные данные) обработки разности, осуществленной первой-восьмой схемами 1201-1208 разности соответственно.
Подобно схеме 215 определения дефекта, изображенного на фиг.2, схема 1217 определения дефекта выводит флаг дефекта и черно-белый флаг в соответствии со знаком (плюс или минус) результатов обработки разности, осуществленной первой-восьмой схемами 1201-1208 разности. Если интересующий пиксель является пикселем G, схема 1217 определения дефекта обращается к знакам результатов обработки разности, осуществленной первой-восьмой схемами 1201-1208 разности. Если интересующий пиксель является пикселем R или В, схема 1217 определения дефекта обращается к знакам результатов обработки разности, осуществленной первой-четвертой схемами 1201-1204 разности.
Подобно схеме 216 определения порогового значения, показанной на фиг.2, схема 1218 определения порогового значения сравнивает абсолютные значения результатов обработки разности, которые были введены от первой-восьмой схем 1209-1216 ABS, с произвольно установленным пороговым значением. Основываясь на результатах сравнения, схема 1218 определения порогового значения выводит первое значение определения, которое является значением, указывающим вероятность того, что сигнал от интересующего пикселя является сигналом дефектного пикселя. Подобно схеме 217 определения корреляции, показанной на фиг.2, схема 1219 определения корреляции сравнивает величины абсолютных значений результатов обработки разности, которые были введены соответственно от первой-восьмой схем 1209-1216 ABS. Основываясь на результатах сравнения, схема 1111 определения корреляции выводит второе значение определения, указывающее вероятность того, что сигнал от интересующего пикселя является сигналом дефектного пикселя.
Следует отметить, что если интересующий пиксель является пикселем G, схема 1218 определения порогового значения и схема 1219 определения корреляции обращаются к абсолютным значениям результатов обработки разности, полученных с помощью первой-восьмой схем 1209-1216 ABS. Если интересующий пиксель является пикселем R или В, схема 1218 определения порогового значения и схема 1219 определения корреляции обращаются к абсолютным значениям результатов обработки разности, полученным с помощью первой-четвертой схем 1209-1212 ABS.
Затем, как и в случае фиг.2, умножитель 218 получает третье значение определения путем умножения первого значения определения и второго значения определения, и третье значение определения вводится в схему 106 коррекции дефектного пикселя с помощью селектора 219.
Как описано выше, схема 105 обнаружения дефектного пикселя, в соответствии с настоящим вариантом выполнения, получает первое значение определения, указывающее величину разности уровней сигнала между интересующим пикселем и множеством пикселей, находящихся вблизи интересующего пикселя. Первое значение определения представляет собой значение, которое возрастает по мере того, как увеличивается разность уровней сигнала между интересующим пикселем и соседними пикселями. Схема 105 обнаружения дефектного пикселя также получает второе значение определения, указывающее ширину распределения величины разности уровней сигнала между интересующим пикселем и множеством соседних пикселей. Второе значение определения представляет собой значение, которое возрастает по мере того, как уменьшается ширина распределения разности уровней сигнала между интересующим пикселем и соседними пикселями. Схема 105 обнаружения дефектного пикселя умножает первое значение определения D1 и второе значение определения D2 и определяет, что чем большее значение получается при умножении, тем выше вероятность того, что сигнал от интересующего пикселя является сигналом дефектного пикселя. Следует отметить, что если это значение, полученное перемножением, больше или равно пороговому значению, схема 105 обнаружения дефектного пикселя может определить сигнал от интересующего пикселя как сигнал дефектного пикселя. В качестве альтернативы схема 105 обнаружения дефектного пикселя может определить сигнал от интересующего пикселя как сигнал дефектного пикселя, если оба значения определения, и D1, и D2, больше или равны пороговому значению.
Кроме того, после того как схема 106 коррекции дефектного пикселя определяет, основываясь на значении, полученном умножением, степень, в которой должен корректироваться интересующий пиксель, или то, корректировать или нет интересующий пиксель, возможно более точно уменьшить влияние дефектного пикселя, чем при использовании традиционных методов.
Следует отметить, что дефектный пиксель не всегда возникает независимо, и есть вероятность того, то два дефектных пикселя существуют рядом. С учетом этого, в том случае, если пиксель, сигнал которого близок к сигналу интересующего пикселя, но очень отличается от сигналов других соседних пикселей, присутствует вблизи интересующего пикселя, схема 105 обнаружения дефектного пикселя может выполнить определение дефектного пикселя при исключении уровня сигнала этого пикселя.
Кроме того, хотя представленные выше варианты выполнения были описаны с использованием в качестве примера обработки для обнаружения дефектного пикселя, выполняемой устройством формирования изображения, таким как цифровая камера или видеокамера, настоящее изобретение не должно быть этим ограничено. Например, персональный компьютер с установленным в нем приложением, оснащенным функциями обработки изображения, может осуществлять описанную выше обработку на сигнале изображения, полученном от съемного запоминающего устройства или через сеть, в соответствии с программой, считанной с памяти (не показано).
Кроме того, в настоящем варианте выполнения, хотя уровень дефекта, сформированный схемой определения порогового значения, и уровень дефекта, сформированный схемой определения корреляции, являются 8-битными, оба уровня дефекта могут иметь разные битные ширины.
Аспекты настоящего изобретения также могут быть реализованы компьютером системы или устройства (или такими устройствами, как CPU или MPU), которое считывает и выполняет программу, записанную на запоминающее устройство, чтобы осуществить функции описанных выше вариантов выполнения, или способом, этапы которого выполняются компьютером системы или устройства, например считывающим или выполняющим программу, записанную на запоминающее устройство, чтобы осуществить функции описанных выше вариантов выполнения. С этой целью программа предоставляется компьютеру, например, через сеть или с записывающего средства различных типов, служащего запоминающим устройством (то есть машиночитаемого средства).
В то время как настоящее изобретение было описано со ссылкой на примерные варианты выполнения, должно быть понятно, что изобретение не ограничивается раскрытыми примерными вариантами выполнения. Объем изложенной ниже формулы изобретения должен соответствовать наиболее широкой интерпретации, чтобы охватывать все такие модификации и эквивалентные структуры и функции.
По данной заявке испрашивается приоритет на основании патентной заявки Японии №2010-073472, поданной 26 марта 2010 года, которая настоящим включена в данный документ посредством ссылки в полном объеме.

Изобретение относится к вычислительной технике. Технический результат заключается в повышении точности обнаружения дефектного пикселя. Устройство обработки изображения для обнаружения из данных изображения, сформированных датчиком изображения, образованным множеством пикселей, сигнала от дефектного пикселя датчика изображения, содержит первый блок определения для получения первого значения определения, указывающего величину разности уровней сигнала между интересующим пикселем и множеством пикселей, расположенных вблизи интересующего пикселя; второй блок определения для получения второго значения определения, указывающего ширину распределения разности уровней сигнала между интересующим пикселем и множеством пикселей, расположенных вблизи интересующего пикселя; и блок обнаружения для обнаружения, является ли сигнал от интересующего пикселя сигналом дефектного пикселя, с использованием первого значения определения и второго значения определения, в котором первый блок определения получает первое значение определения путем получения разностей уровней сигнала между интересующим пикселем и каждым из множества пикселей, расположенных вблизи интересующего пикселя, получения из каждой разности значения, указывающего вероятность того, что сигнал интересующего пикселя является сигналом дефектного пикселя, и перемножения полученных значений. 4 н. и 7 з.п. ф-лы, 22 ил.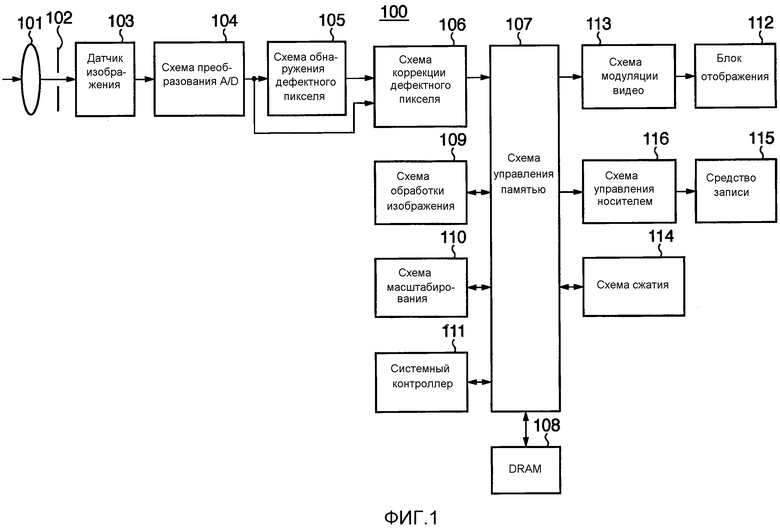
1. Устройство обработки изображения для обнаружения из данных изображения, сформированных датчиком изображения, образованным множеством пикселей, сигнала от дефектного пикселя датчика изображения, содержащее:
первый блок определения, выполненный с возможностью получения первого значения определения, указывающего величину разности уровней сигнала между интересующим пикселем и множеством пикселей, расположенных вблизи интересующего пикселя;
второй блок определения, выполненный с возможностью получения второго значения определения, указывающего ширину распределения разности уровней сигнала между интересующим пикселем и множеством пикселей, расположенных вблизи интересующего пикселя; и
блок обнаружения, выполненный с возможностью обнаружения, является ли сигнал от интересующего пикселя сигналом дефектного пикселя, с использованием первого значения определения и второго значения определения,
в котором первый блок определения получает первое значение определения путем получения разностей уровней сигнала между интересующим пикселем и каждым из множества пикселей, расположенных вблизи интересующего пикселя, получения из каждой разности значения, указывающего вероятность того, что сигнал интересующего пикселя является сигналом дефектного пикселя, и перемножения полученных значений,
при этом первое значение определения представляет собой значение, которое возрастает по мере возрастания величины разности, а второе значение определения представляет собой значение, которое возрастает по мере уменьшения ширины распределения величины разности, и
блок обнаружения обнаруживает сигнал от интересующего пикселя как сигнал дефектного пикселя, когда и первое значение определения, и второе значение определения больше или равны заданному пороговому значению.
2. Устройство обработки изображения по п.1, дополнительно содержащее блок коррекции, выполненный с возможностью коррекции уровня сигнала интересующего пикселя с использованием значения коррекции, полученного из уровней сигналов пикселей, расположенных вблизи интересующего пикселя, когда блок обнаружения обнаруживает сигнал от интересующего пикселя как сигнал дефектного пикселя.
3. Устройство обработки изображения по п.1, дополнительно содержащее:
блок обработки, выполненный с возможностью выполнения обработки фильтра верхних частот в области, включающей в себя интересующий пиксель, во множестве направлений, центрированных на интересующем пикселе,
при этом первый блок определения получает первое значение определения из абсолютного значения результата обработки фильтра верхних частот и
второй блок определения получает второе значение определения из ширины распределения абсолютного значения результата обработки фильтра верхних частот.
4. Устройство обработки изображения по п.3, в котором
блок обработки осуществляет обработку фильтра нижних частот в области, включающей в себя интересующий пиксель, во множестве направлений, центрированных на интересующем пикселе, до выполнения обработки фильтра нижних частот, и
блок обработки осуществляет обработку фильтра нижних частот в одном из направлений, центрированных на интересующем пикселе, и затем выполняет обработку фильтра верхних частот в другом из направлений, центрированных на интересующем пикселе, отличном от направления обработки фильтра нижних частот.
5. Устройство обработки изображения по п.3, дополнительно содержащее:
множество блоков обработки, выполненных с возможностью осуществления обработки фильтра верхних частот в различных диапазонах частот;
множество первых блоков определения и множество вторых блоков определения, которые обеспечены соответственно множеству блоков обработки; и
блок выбора, выполненный с возможностью выбора значения, полученного из первого значения определения и второго значения определения, полученных от первого блока определения и второго блока определения, которые соответствуют одному из блоков обработки.
6. Устройство обработки изображения для обнаружения из данных изображения, сформированных датчиком изображения, образованным множеством пикселей, сигнала от дефектного пикселя датчика изображения, содержащее:
первый блок определения, выполненный с возможностью получения первого значения определения, указывающего величину разности уровней сигнала между интересующим пикселем и множеством пикселей, расположенных вблизи интересующего пикселя;
второй блок определения, выполненный с возможностью получения второго значения определения, указывающего ширину распределения разности уровней сигнала между интересующим пикселем и множеством пикселей, расположенных вблизи интересующего пикселя;
блок коррекции, выполненный с возможностью коррекции, с использованием значения, полученного путем перемножения первого значения определения и второго значения определения, уровня сигнала интересующего пикселя путем взвешивания и суммирования уровня сигнала интересующего пикселя и значения коррекции, полученного из уровней сигнала пикселей, расположенных поблизости от интересующего пикселя,
при этом первый блок определения получает первое значение определения путем получения разностей уровней сигнала между интересующим пикселем и каждым из множества пикселей, находящихся поблизости от интересующего пикселя, получения из каждой разности значения, указывающего вероятность того, что сигнал от интересующего пикселя является сигналом дефектного пикселя, и перемножения полученных значений,
при этом первое значение определения является значением, которое увеличивается по мере возрастания величины разности, а второе значение определения является значением, которое возрастает по мере уменьшения ширины распределения величины разности, и
блок коррекции назначает больший вес значению коррекции, по мере возрастания значения, полученного путем перемножения первого значения определения и второго значения определения.
7. Устройство обработки изображения по п.6, дополнительно содержащее:
блок обработки, выполненный с возможностью осуществления обработки фильтра верхних частот в области, включающей в себя интересующий пиксель, во множестве направлений, центрированных на интересующем пикселе,
при этом первый блок определения получает первое значение определения из абсолютного значения результата обработки фильтра верхних частот и
второй блок определения получает второе значение определения из ширины распределения абсолютного значения результата обработки фильтра верхних частот.
8. Устройство обработки изображения по п.7, в котором
блок обработки, до выполнения обработки фильтра верхних частот, выполняет обработку фильтра нижних частот в области, включающей в себя интересующий пиксель, во множестве направлений, центрированных на интересующем пикселе, и
блок обработки выполняет обработку фильтра нижних частот в одном из направлений, центрированных на интересующем пикселе, и затем выполняет обработку фильтра верхних частот в другом направлении из центрированных на интересующем пикселе, отличном от направления обработки фильтра нижних частот.
9. Устройство обработки изображения по п.7, дополнительно содержащее:
множество блоков обработки, выполненных с возможностью осуществления обработки фильтра верхних частот в различных диапазонах частот;
множество первых блоков определения и множество вторых блоков определения, которые обеспечены соответственно множеству блоков обработки; и
блок выбора, выполненный с возможностью выбора значения, полученного из первого значения определения и второго значения определения, полученных первым блоком определения и вторым блоком определения, которые соответствуют одному из блоков обработки.
10. Способ управления для устройства обработки изображения, которое обнаруживает из данных изображения, сформированных датчиком изображения, образованным множеством пикселей, сигнал от дефектного пикселя датчика изображения, содержащий:
выполняемый первым блоком определения этап получения первого значения определения, указывающего величину разности уровней сигнала между интересующим пикселем и множеством пикселей, расположенных вблизи интересующего пикселя, причем первое значение определения увеличивается по мере возрастания величины разности;
выполняемый вторым блоком определения этап получения второго значения определения, указывающего ширину распределения величины разности уровней сигнала между интересующим пикселем и множеством пикселей, расположенных поблизости от интересующего пикселя, причем второе значение определения увеличивается по мере уменьшения ширины распределения величины разности; и
выполняемый блоком обнаружения этап обнаружения сигнала от интересующего пикселя как сигнала дефектного пикселя, когда как первое значение определения, так и второе значение определения больше или равны заданному пороговому значению,
при этом на этапе получения первого значения определения первый блок определения получает первое значение определения путем получения разностей уровней сигнала между интересующим пикселем и каждым из множества пикселей, находящихся поблизости от интересующего пикселя, получения из каждой разности значения, указывающего вероятность того, что сигнал от интересующего пикселя является сигналом дефектного пикселя, и перемножения полученных значений.
11. Способ управления для устройства обработки изображения, которое обнаруживает из данных изображения, сформированных датчиком изображения, образованным множеством пикселей, сигнал от дефектного пикселя датчика изображения, содержащий:
выполняемый первым блоком определения этап получения первого значения определения, указывающего величину разности уровней сигнала между интересующим пикселем и множеством пикселей, расположенных вблизи интересующего пикселя, причем первое значение определения увеличивается по мере возрастания величины разности;
выполняемый вторым блоком определения этап получения второго значения определения, указывающего ширину распределения величины разности уровней сигнала между интересующим пикселем и множеством пикселей, расположенных вблизи интересующего пикселя, причем второе значение определения увеличивается по мере уменьшения ширины распределения величины разности; и
выполняемый блоком коррекции этап коррекции уровня сигнала интересующего пикселя путем взвешивания и суммирования уровня сигнала интересующего пикселя и значения коррекции, полученного из уровней сигнала пикселей, расположенных поблизости от интересующего пикселя, так что значению коррекции назначается больший вес по мере возрастания значения, полученного путем перемножения первого значения определения и второго значения определения,
при этом на этапе получения первого значения определения первый блок определения получает первое значение определения путем получения разностей уровней сигнала между интересующим пикселем и каждым из множества пикселей, находящихся поблизости от интересующего пикселя, получения из каждой разности значения, указывающего вероятность того, что сигнал от интересующего пикселя является сигналом дефектного пикселя, и перемножения полученных значении.
| JP 2005341244 A, 08.12.2005 | |||
| JP 2005123946 A, 12.05.2005 | |||
| US 7460688 B2, 02.12.2008 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| МЕТОДИКИ МАСШТАБИРУЕМОСТИ НА ОСНОВЕ ИНФОРМАЦИИ СОДЕРЖИМОГО | 2006 |
|
RU2378790C1 |

