Изобретение относится к области космонавтики и служит для использования в составе пилотируемого транспортного корабля, предназначенного для доставки экипажа на околоземную и окололунную орбиты и возвращения экипажа на Землю.
В настоящее время в спускаемом аппарате (СА) космического транспортного корабля типа «Союз» используется амортизационное кресло «Казбек-УМ» с индивидуальным ложементом (1. Сайт ОАО «НПП «Звезда» http://www.zvezda-npp.ru/kasbek.html; 2. А.С. Барер «Предел переносимости. Очерки об устойчивости человека к неблагоприятным факторам авиационного и космического полетов». - М.: БЛОК-Информ-Экспресс, 2012 г., стр. 299), являющееся рабочим местом космонавта и обеспечивающее переносимость перегрузок, возникающих на всех участках полета космического аппарата и при его приземлении.
Кресло состоит из каркаса, ложемента, вертикального амортизатора и привязной системы.
Каркас представляет собой жесткую чашеобразную конструкцию, обобщенно воспроизводящую форму сидящего человека со стороны спины. В головной части каркас опирается на амортизатор, закрепленный в корпусе СА, а в области изножья шарнирно крепится к полу СА.
Ложемент предназначен для размещения космонавта в позе, близкой к позе эмбриона, и равномерного распределения нагрузок на опорные поверхности тела.
Ложемент изготавливается из полимерного материала персонально для каждого космонавта по гипсовому слепку, сделанному с его тела в положении сидя. Ложемент плотно вставлен в каркас.
Привязная система типа «мягкий панцирь» фиксирует космонавта в кресле в заданной позе, что позволяет ему удовлетворительно переносить перегрузки, возникающие при выводе корабля в космос и при спуске на Землю, включая приземление СА в штатном режиме, т.е. с исправными парашютной системой и тормозными двигателями мягкой посадки.
Ось вертикального амортизатора проходит за головой космонавта в плоскости симметрии кресла. Амортизатор перед посадкой переводится из нижнего рабочего положения в верхнее, что необходимо для обеспечения расчетной длины его хода, требуемой для снижения до безопасного уровня ударных перегрузок, направленных по оси «спина-грудь», возникающих в случае приземлении СА в нештатном (жестком) режиме.
Недостатками известного кресла являются следующие.
1. Индивидуальный ложемент космонавта является персональным и не может использоваться другим космонавтом, что усложняет возвращение на Землю членов экипажей орбитальной станции, доставленных на орбиту, например, кораблем типа «Space Shuttle», и возвращаемых с орбиты кораблем типа «Союз». Тогда вновь прибывающий экипаж необходимо снабжать их индивидуальными ложементами, которые затем требуется перенести в другой корабль и смонтировать взамен ранее установленных.
Аналогичная ситуация создается в случае аварийной эвакуации космонавтов с орбитальной станции специально запускаемым кораблем-спасателем.
2. Известно также, что при длительном пребывании в невесомости происходит распрямление позвоночного столба, увеличение высоты межпозвонковых дисков и декальцинация костных структур человека, что приводит к увеличению роста космонавта до размеров, препятствующих его расчетному размещению в ложементе к моменту возвращения на Землю.
Кроме того, создание индивидуального ложемента является весьма длительным и трудоемким процессом, выполняемым при помощи уникального оборудования, что ограничивает возможность оперативной замены членов экипажа только в пределах дублирующего состава, имеющего готовые ложементы. Наконец, ввиду естественных изменений, происходящих со временем в антропометрии человека, к очередному полету космонавту приходится изготавливать новый индивидуальный ложемент, который, таким образом, фактически является одноразовым.
3. Вертикальный амортизатор, расположенный между каркасом кресла и корпусом СА, позволяет ослабить перегрузки только по одной оси («грудь-спина»), в то время как в условиях реального приземления в пересеченной местности или при наличии ветрового сноса СА могут возникать перегрузки другого направления.
Задачей изобретения является создание универсального кресла, обеспечивающего оперативную подгонку его геометрии к антропометрическим особенностям любого космонавта в набираемом контингенте, допускающего многократное применение без замены ложементов, обеспечивающего амортизацию перегрузок как минимум по двум осям.
Поставленная задача решается креслом, в котором каркасом является жесткая рама, на которой подвижно установлена платформа для размещения космонавта. Платформа состоит из двух раздвижных частей (плечевой и тазовой), каждая из которых содержит обхваты для отдельных частей тела. Плечевая часть включает обхваты для торса и головы, тазовая включает обхваты для тазобедренной группы, ступней и соединяющую их стойку. Каждый обхват воспроизводит обобщенную геометрию соответствующей части тела и также выполнен раздвижным и подвижным относительно платформы. Каждый обхват снабжен механизмами регулировки и фиксации. Обхваты в совокупности образуют ложемент, в котором формируется расчетная поза, которая настраивается при помощи регулирующих механизмов под антропометрию любого космонавта, размещаемого в кресле. При этом обеспечивается возможность регулирования кресла силами самого космонавта.
Рама кресла со стороны изголовья, как и в прототипе, опирается на вертикальный амортизатор, воспринимающий перегрузки приземления в направлении «грудь-спина». В отличие от прототипа ось амортизатора смещена из-за головы космонавта в зону между головой и плечом (правым или левым), что позволяет сократить расстояние между головой космонавта и корпусом СА и использовать освободившееся пространство для увеличения «роста сидя», увеличивая углы сгиба в тазобедренном суставе, что способствует повышению комфортности размещения и переносимости перегрузок.
Кроме того, такое смещение оси амортизатора приближает ее к центру масс кресла, позволяя сократить потребный ход амортизатора при том же уровне перегрузок, и, таким образом, увеличить дефицитное свободное внутреннее пространство СА.
Между рамой и платформой устанавливается по крайней мере один горизонтальный амортизатор, воспринимающий перегрузки в направлении «голова-таз». Так же, как и вертикальный, горизонтальный амортизатор предусматривает регулировку по запасу хода, необходимого для поглощения до безопасного уровня импульса ударных перегрузок, рассчитанного для антропометрических параметров данного космонавта.
Заявляемое устройство представлено фигурами 1, 2, 3.
Фиг.1 представляет вид кресла сбоку с местным разрезом в области расположения горизонтального амортизатора.
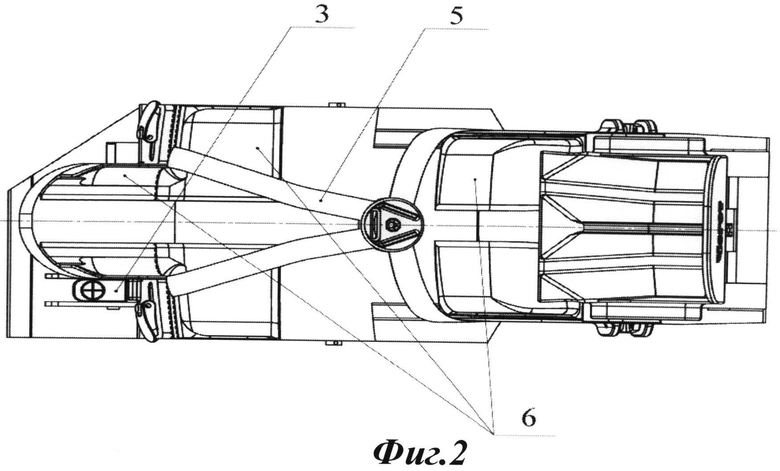
Фиг.2 представляет вид сверху кресла, отрегулированного для верхнего предела диапазона антропометрических параметров.
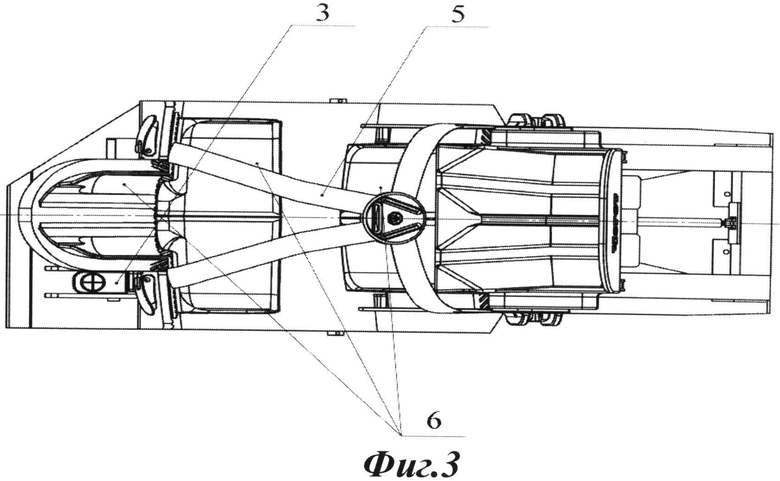
Фиг.3 представляет вид сверху кресла, отрегулированного для нижнего предела диапазона антропометрических параметров.
Основные компоненты кресла: направляющая рама 1, подвижная платформа 2, вертикальный амортизатор 3 и горизонтальный амортизатор 4, привязная система 5, регулируемые обхваты 6, стойка 7.
Регулирование размера по «росту сидя» и высоты стойки осуществляется линейными перемещениями соответствующих составных частей платформы.
Регулирование объема (сдвигание-раздвигание) в области таза, плеч и головы осуществляется дугообразными перемещениями обхватов.
В представленном варианте исполнения подвижные элементы фиксируются в заданном положении эргономичными эксцентриковыми зажимами.
Горизонтальный амортизатор, использующий, например, энергопоглощающий механизм типа «пуансон-матрица», размещается внутри рамы (фиг.1), не занимая дефицитного пространства между рамой и полом СА.
Таким образом, предлагаемое кресло космонавта обеспечивает универсальность и многократность его применения с учетом антропометрических особенностей любого космонавта и расширяет возможности амортизации расчетных перегрузок.
Изобретение относится к средствам обеспечения нормальной жизнедеятельности экипажа пилотируемого транспортного корабля, предназначенного для полетов на околоземную и окололунную орбиты и возвращения на Землю. Кресло содержит направляющую раму (1), подвижную платформу (2), вертикальный (3) и горизонтальный (4) амортизаторы, привязную систему и стойку (7). Платформа (2) состоит из двух раздвижных частей: плечевой и тазовой. Каждая из них содержит регулируемые обхваты (6). Посредством данных частей и высоты стойки (7) производят регулировку размера по «росту сидя». Регулировка объема в области таза, плеч и головы осуществляется дугообразными перемещениями обхватов (6). Подвижные элементы могут фиксироваться в заданном положении эргономичными эксцентриковыми зажимами. Ось амортизатора (3) смещена в зону между головой и плечом. Амортизатор (4) компактно размещен внутри рамы (1) и выполнен, например, в виде энергопоглощающего механизма типа «пуансон-матрица». Техническим результатом изобретения является создание универсального кресла, допускающего оперативную его подгонку к антропометрическим особенностям космонавта и амортизацию перегрузок как минимум по двум осям, а также многократное применение без замены ложементов. 2 з.п. ф-лы, 3 ил.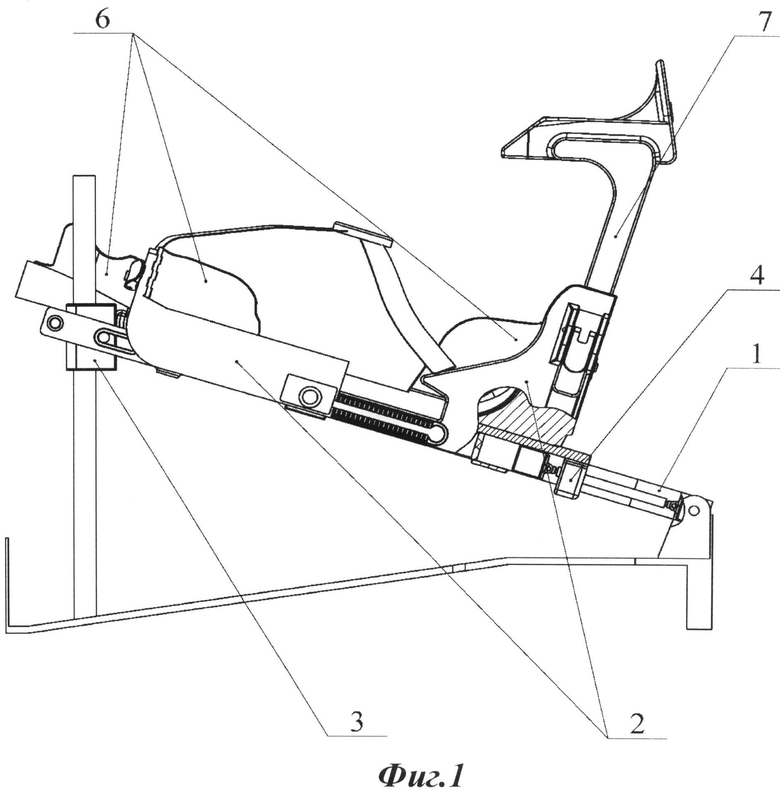
1. Кресло космонавта, содержащее каркас с привязной системой, вертикальный амортизатор в головной части и ложемент, отличающееся тем, что каркас выполнен в виде рамы с подвижно установленной на ней раздвижной платформой, в состав которой входят образующие ложемент раздвижные обхваты для отдельных частей тела, снабженные устройствами для регулировки в соответствии с индивидуальными антропометрическими данными любого космонавта и для фиксации его в заданном положении.
2. Кресло по п.1, отличающееся тем, что рама и платформа соединены между собой не менее чем одним горизонтальным амортизатором.
3. Кресло по п.1 или 2, отличающееся тем, что ось вертикального амортизатора смещена в левую или правую сторону от плоскости симметрии кресла.
| US 6299103 B1, 09.10.2001 | |||
| US 8191830 B2, 05.06.2012 | |||
| US 20100282902 A1, 11.11.2010 | |||
| СПОСОБ ВЫРАБОТКИ КОМАНДЫ НА ВВОД ПАРАШЮТА КАТАПУЛЬТНОГО КРЕСЛА | 2004 |
|
RU2280592C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ КАТАПУЛЬТНОГО КРЕСЛА | 1997 |
|
RU2116939C1 |
| Способ оценки действительности документа при помощи оптического распознавания текста на изображении круглого оттиска печати/штампа на цифровом изображении документа | 2020 |
|
RU2750395C1 |
| СТАНЦИЯ УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2001 |
|
RU2221325C2 |
| EP 1918197 A2, 07.05.2008 | |||

