Изобретение относится к авиационной технике, в частности, к средствам спасения экипажа самолета.
Известен способ управления режимом работы катапультного кресла К-36Д-3,5 (см. Руководство по технической эксплуатации 903-9200-1000.0-02РЭ-ЛУ, Издание ОАО "НИИ Звезда" 1999 г., и заявка №97112580/28 (013156) от 22.07.1997 г.), в котором информация, получаемая с борта самолета о скорости и высоте полета, вертикальной скорости снижения, вертикальной перегрузке, угле и угловой скорости крена и факте обжатия шасси самолета в момент катапультирования, используется для изменения функциональной конфигурации кресла. При этом команда на ввод парашюта спасения летчика вырабатывается с использованием бортовых данных о режиме полета и датчиков ускорения торможения катапультного кресла, размещаемых на кресле.
При отсутствии на борту электропитания или выхода из строя по различным причинам информационных систем самолета реализуется строго определенная функциональная схема кресла. При этом команда на ввод парашюта спасения летчика вырабатывается через строго определенное время с помощью электронного таймера, запускаемого в момент отделения кресла от самолета. Это время обеспечивает торможение кресла до допустимой скорости и, соответственно, безопасный ввод парашюта при самом неблагоприятном сочетании параметров - максимально возможной массе летчика, максимально допустимой для ввода парашюта высоте полета, "горячей" атмосфере, максимально возможной скорости полета самолета и угле пикирования самолета минус 90°. Если реальные условия полета, состояние атмосферы и массовые характеристики летчика отличаются от предельных значений, то ввод парашюта в этих случаях осуществляется с чрезмерной задержкой. В силу этого неоправданно увеличивается минимально безопасная высота катапультирования.
Наиболее близким техническим решением задачи по выработке команды на ввод парашюта при отсутствии информации с борта о режиме полета самолета и наличии на кресле датчиков ускорения является способ использования значения перегрузки торможения кресла n. Перегрузка торможения кресла в момент, когда скорость становится допустимой для ввода парашюта спасения [V]n.c., определяется соотношением:
где CxS - коэффициент аэродинамического сопротивления кресла;
ρ - плотность атмосферы;
m - масса катапультного кресла с летчиком;
g - ускорение свободного падения.
Одной и той же скорости катапультного кресла, допустимой для ввода парашюта [V]п.c., но различной массе летчика, высоте катапультирования и состоянии атмосферы, определяющих величину плотности атмосферы ρ, коэффициента аэродинамического сопротивления CxS, зависящего от антропометрических размеров летчика в снаряжении, соответствуют различные значения перегрузки торможения, отличающиеся более чем в 2 раза.
Поэтому, если в качестве определяющего значения перегрузки торможения в момент ввода парашюта выбрать значение, реализующееся при максимальной катапультной массе, на максимально разрешенной для ввода парашюта высоте, в условиях "горячей" атмосферы, то в других условиях, в частности, при малой массе, при катапультировании у земли в условиях "холодной" атмосферы, скорость катапультного кресла в момент реализации этого значения перегрузки будет существенно меньше допустимой [V]п.c., парашют будет вводиться с чрезмерной задержкой, из-за чего для этого случая величина минимально безопасной высоты будет неоправданно завышена.
Именно поэтому метод выработки управляющей команды на ввод парашюта спасения при отсутствии информационной связи с бортом непосредственно по величине перегрузки, определенной для крайних значений определяющих параметров - максимальной катапультной массы, максимально разрешенной высоты ввода парашюта и "горячей" атмосферы, практически мало отличается от метода с постоянной задержкой.
Технической задачей изобретения является в случае отсутствия информационных сигналов с борта самолета о режимах полета самолета, а также при состоянии атмосферы и массовых характеристиках летчика, отличных от предельных, обеспечение уменьшения минимально безопасной высоты катапультирования с использованием датчиков ускорений, расположенных в катапультном кресле и измеряющих перегрузку его торможения по времени.
Для этого предлагается использовать два взаимодублирующих способа выработки управляющей на ввод парашюта:
1. По величине перегрузки торможения, допустимая величина которой [n] задается
- в зависимости от высоты катапультирования, определяемой с помощью двух барореле, имеющих настройку на высоту Н=2 км и Н=6 км;
- в зависимости от катапультируемой массы, поддиапазон которой устанавливается на катапультном кресле с помощью трехпозиционного тумблера (поддиапазоны малой, средней и большой массы - ПМ, ПС и ПБ соответственно).
Поэтому измеренные значения перегрузки n могут сравниваться с шестью допустимыми значениями [n], задаваемыми в соответствии с таблицей 1.
И при
вырабатывается команда на ввод парашюта.
2. По величине скорости движения КК, определяемой на основании полученной с помощью датчика перегрузки информации о величине перегрузки торможения и изменении этой перегрузки по времени, при этом никакая другая информация не используется.
Изменение скорости V катапультного кресла по времени τ при V>[V]п.c. после окончания работы ракетного двигателя кресла с достаточной степенью точности описывается следующим дифференциальным уравнением:
где m - суммарная катапультируемая масса;
CxS - коэффициент аэродинамического сопротивления;
ρ - плотность атмосферы.
Параметры CxS, ρ и m являются неопределенными, при этом параметр m является постоянным, но неизвестным, а параметры CxS и ρ являются переменными по времени и тоже неизвестными. Однако, в течение небольшого времени порядка Т=0,1-0,15с параметры CxS и ρ можно тоже считать хотя и неизвестными, но постоянными.
Тогда решение указанного дифференциального уравнения имеет вид:
где Vo - начальная скорость кресла;
V - текущая скорость кресла;
nо - перегрузка торможения кресла в начальный момент рассматриваемого временного интервала.
С другой стороны, значение V может быть определено следующим образом:

где n - текущее измеренное значение перегрузки торможения кресла. Подставляя (5) в (4), окончательно получаем:
Анализируя в процессе движения катапультного кресла в свободном полете изменение измеренного значения перегрузки торможения на последовательном ряде временных интервалов Т, с использованием соотношения (6) определяется скорость движения кресла на начальный момент каждого временного интервала. И в том случае, когда эта скорость оказывается меньше или равна [V]п.c., вырабатывается с временным запаздыванием, равным Т, команда на ввод парашюта спасения.
Предложенный способ может быть реализован следующим образом.
В аварийной ситуации, после поступления команды на катапультирование, включается система автоматики катапультного кресла и вырабатываются управляющие команды на срабатывание систем кресла. При этом команда на ввод парашюта спасения вырабатывается по двум независимым линиям - по основной линии с использованием бортовой информации о режиме полета самолета и информации от кресельных датчиков ускорения и по двум взаимно дублирующим линиям с использованием данных только от кресельных датчиков ускорения в соответствии с соотношениями (2) и (6).
При отсутствии информации с борта о режиме полета самолета в момент катапультирования вырабатываются только дублирующие команды.
Данный способ реализуется известной конструкцией катапультного кресла, содержащей сиденье, заголовник со стабилизирующими штангами и размещенным в нем спасательным парашютом, систему автоматического управления креслом и автономный источник питания, в систему автоматического управления которым дополнительно введено второе барореле, настроенное на высоту 2 км, а трехпозиционный тумблер, с помощью которого на КК задается масса пилота в снаряжении, связан с электронным вычислителем КК, реализующим вышеописанный алгоритм выработки управляющей команды на ввод парашюта.
Пример осуществления способа при следующем режиме катапультирования:
скорость самолета Vo=1244 км/час
(индикаторная скорость Vi=1100 км/час);
высота барометрическая Н=1,5 км;
атмосфера "горячая";
масса пилота соответствует поддиапазону средних масс.
На чертеже приведено расчетное изменение перегрузки орможения кресла n по времени, там же указаны моменты выработки управляющей команды на ввод парашюта спасения по основной линии (момент времени τ1), а также моменты выработки управляющих команд, которые были бы реализованы при использовании постоянной временной задержки τ4 и предлагаемого способа с использованием допустимого значения перегрузки (момент времени τ3) и определения скорости КК (момент времени τ2), τ=0 соответствует моменту отделения КК от самолета.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ КАТАПУЛЬТНОГО КРЕСЛА | 1997 |
|
RU2116939C1 |
| КАТАПУЛЬТНОЕ КРЕСЛО | 1997 |
|
RU2116938C1 |
| ДВУХРЕЖИМНЫЙ СПАСАТЕЛЬНЫЙ ПАРАШЮТ КАТАПУЛЬТНОГО КРЕСЛА | 2006 |
|
RU2310585C2 |
| СПОСОБ И СИСТЕМА ИНФОРМИРОВАНИЯ ЭКИПАЖА О БЕЗОПАСНОСТИ КАТАПУЛЬТИРОВАНИЯ | 2021 |
|
RU2774269C1 |
| СПОСОБ ТОРМОЖЕНИЯ КАТАПУЛЬТНОГО КРЕСЛА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2500583C2 |
| СПОСОБ АВАРИЙНОГО СПАСЕНИЯ ЛЕТЧИКА | 2008 |
|
RU2382722C2 |
| СПОСОБ И СИСТЕМА НАПОЛНЕНИЯ КУПОЛА ПАРАШЮТА | 2019 |
|
RU2713689C1 |
| СПОСОБ И СИСТЕМА КАТАПУЛЬТИРОВАНИЯ НА БОЛЬШИХ ИНДИКАТОРНЫХ СКОРОСТЯХ ПОЛЕТА | 2022 |
|
RU2788230C1 |
| Способ подготовки летного состава к аварийному покиданию летательного аппарата и устройство его реализующее | 2024 |
|
RU2832486C1 |
| Способ и система приземления парашютиста | 2017 |
|
RU2671896C1 |
Группа изобретений относится к авиационной технике, в частности к технике управления катапультным креслом (КК), и предназначено для выработки команд на включение в определенной последовательности систем КК, в том числе и парашюта спасения, при покидании летчиком самолета в аварийных ситуациях. Для случаев, когда отсутствует информационная связь КК с бортом самолета, команду на ввод парашюта предлагается вырабатывать не по времени, а используя данные о перегрузке торможения КК, полученные с помощью датчика перегрузки, установленного на КК. В одном из вариантов способа команда на ввод парашюта вырабатывается на основании сравнения реальной перегрузки торможения с одним из шести возможных допустимых значений, которые зависят от высоты, определяемой с помощью двух барореле, настроенных на высоту 2 и 6 км, и от поддиапазона массы летчика в снаряжении, задаваемого перед полетом летчиком с помощью трехпозиционного тумблера, установленного на КК. В другом варианте способа команда на ввод парашюта вырабатывается на основании анализа изменения перегрузки торможения КК на ряде временных интервалов и аналитического определения скорости движения КК. Когда эта скорость оказывается меньше или равна допустимой скорости ввода спасательного парашюта, подается команда на его ввод с временным запаздыванием, кратным временному интервалу определения скорости движения кресла. Группа изобретений обеспечивает уменьшение минимально безопасной высоты катапультирования в условиях отсутствия информационных сигналов с борта самолета о режимах полета. 2 н.п. ф-лы, 1 ил., 1 табл.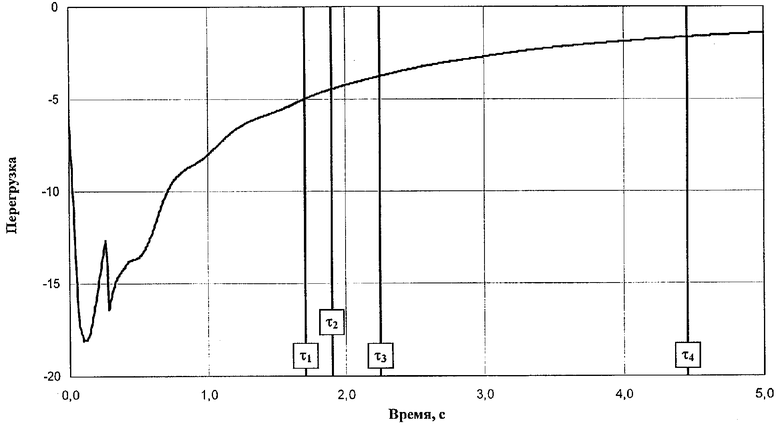
где n0 - значение перегрузки в начале каждого временного интервала,
g - ускорение свободного падения,
и в случае, когда скорость V0 меньше или равна допустимой скорости ввода спасательного парашюта, подают команду на его ввод с временным запаздыванием, кратным временному интервалу определения скорости движения кресла, причем величину Т временного интервала устанавливают равной 0,1-0,15 с.
| Brian A | |||
| Miller, Introducing the 16 LS High Performance Ejection Seat, - SAFE Association, 35 th Proceedings, 1997 | |||
| БАРОВРЕМЕННОЙ ЗАТВОР ДЛЯ ВВОДА ПАРАШЮТНОЙ СИСТЕМЫ ПРИ КАТАПУЛЬТИРОВАНИИ КРЕСЛА С ЛЕТЧИКОМ | 2002 |
|
RU2209153C1 |
| БАРОВРЕМЕННОЙ ЗАТВОР ДЛЯ ВВОДА ПАРАШЮТНОЙ СИСТЕМЫ ПРИ КАТАПУЛЬТИРОВАНИИ КРЕСЛА С ЛЕТЧИКОМ | 1998 |
|
RU2146211C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ КАТАПУЛЬТНОГО КРЕСЛА | 1997 |
|
RU2116939C1 |
| КАТАПУЛЬТНОЕ КРЕСЛО | 1997 |
|
RU2116938C1 |

