Область техники
Устройство управления вектором тяги реактивного двигателя относится к аэрокосмической технике.
При патентном поиске и анализе других доступных источников информации технических решений по управлению вектором тяги, аналогичных предложенному, не выявлено.
Уровень техники
Известно устройство синхрофазотрона для управления и разгона протонов в нарастающем магнитном поле. Советская энциклопедия, 1968 г., стр.168.
Признаком, являющимся общим для известного и заявленного устройства, является воздействие электромагнитного поля на элементарные частицы, в том числе и протоны.
К причинам, препятствующим получению указанного результата, относится то, что протоны находятся в тороидальной формы вакуумной камере, создающей условия для разгона этих протонов до очень высоких скоростей, но не для отклонения потока протонов от оси движения.
Известно устройство формирования на поверхности ферромагнитной жидкости образований в виде «иголок ежа». Устройство представляет собой емкость, содержащую ферромагнитную (ионизированную) жидкость. Над емкостью сверху установлен магнит. При увеличении напряженности магнитного поля вблизи поверхности жидкости ферромагнитная жидкость притягивается и поднимается вверх, к магниту, и образует поверхность, похожую на шипы ежа. Журнал «Техника молодежи», №921, июнь, 2010 г., стр.42, репортаж с выставки инноваций, Иван Седов.
Признаком, являющимся общим для известного и заявленного решения, является перемещение массы ионизированных частиц к полюсам магнита.
Причиной, препятствующей получению требуемого результата, является то, что визуализация влияния магнитного поля на изменение формы поверхности поля проводилась на спокойной стационарной поверхности жидкости, находящейся в емкости.
Известно устройство выравнивания вихреобразного потока воздуха на входе в воздухозаборник газотурбинного двигателя (ГТД) с воздушным винтом за счет ионизации потока воздуха и воздействия на него магнитного поля.
Признаком, являющимся общим для известного и заявленного способа, является управляющее воздействие электромагнитов на ионизированный поток газа.
Причины, препятствующие получению требуемого результата в данном способе, заключаются в том, что для управления (выравнивания плотности) закрученным потоком воздуха перед воздухозаборником:
а) поток воздуха необходимо искусственно ионизировать за счет воздействия на него электрического разряда, образуемого введенными в поток электродами, тогда как в заявленном способе ионизация газового потока, истекающего из камеры сгорания, достигается за счет высокой температуры сгорания топлива (термической ионизации).
б) перемещение ионов газа в потоке происходит поперек оси движения потока от периферии к центру потока и не влияет на направление вектора тяги ГТД. Статья «Управление потоком ионизированного газа в дозвуковом входном устройстве ГТД (газотурбинного двигателя) с воздушным винтом», О.В. Драч, УДК 629.735.03.621.43.031.3 (045) http://www.nbuv.gov.ua/portal/natural/Vejpt/2007_6_4/EEJET_6_4_2007_13-16.pdf.
Наиболее близким по технической сущности и достигаемому результату к заявленному изобретению является устройство управления пучком (потоком) электронов в кинескопе.
Признаком, являющимся общим для известного и заявленного устройства, является воздействие на поток заряженных частиц (электронов), вылетающих из электронной пушки, магнитного поля отклоняющей системы, состоящей из вертикальных и горизонтальных отклоняющих катушек, воздействующих на поток электронов магнитным полем и заставляющих поток электронов отклоняться в двух плоскостях (вверх-вниз и вправо-влево).
К причинам, препятствующим получению указанного результата, относится то, что отклоняемый поток электронов в силу ничтожной массы потока не оказывает кинетического воздействия на элементы устройства.
Раскрытие изобретения
Сущность заявляемого устройства
Как известно, управление летательным аппаратом (ЛА) в полете по тангажу и рысканью осуществляется изменением направления вектора тяги относительно оси симметрии ЛА, проходящий через центр массы ЛА, или смещением центра массы ЛА относительно направления вектора тяги:
- Управляющими малогабаритными реактивными двигателями
- Управляющими соплами
- Дефлекторами
- Газовыми рулями
- Аэродинамическими рулями
- Отклонением головной части ЛА.
Управление ЛА по крену производится устройством, создающим крутящий момент относительно продольной оси ЛА:
- При наличии одного центрального сопла - малогабаритными реактивными двигателями;
- При наличии двух и более сопел - отклонением подвижных частей сопел в противоположных направлениях.
Однако такие устройства сопряжены с увеличение массы ЛА и уменьшением надежности вследствие сложности конструкции:
- Управляющих сопел;
- Рулевого привода;
- Аккумуляторных батарей или других энергетических бортовых источников питания.
Предлагаемое устройство управления вектором тяги позволяет значительно упростить конструкцию ЛА путем замены управляющих сопел стационарными, а также исключением рулевого привода, аккумуляторных батарей или дополнительных бортовых источников питания, тем самым значительно уменьшить вес и увеличить надежность ЛА.
Истекающий из камеры сгорания поток газов при температуре от 3500°C в камере сгорания до 150°C на выходном срезе сопла является ионизированным до состояния плазмы за счет воздействия указанной температуры, т.е. состоящим из положительно заряженных ионов и электронов. При воздействии на ионизированный поток электромагнитами управления поток положительных ионов будет отклоняться в сторону отрицательного полюса магнита. При этом масса ионов в потоке на несколько порядков выше массы электронов. Вследствие этого направление вектора тяги определяется направлением потока ионов относительно оси сопла под воздействием на него электромагнитов управления.
Управление вектором тяги РД достигается отклонением относительно оси симметрии сопла истекающего из камеры сгорания потока плазмы вследствие изменения напряженности электромагнитного поля, которое создается электромагнитами управления.
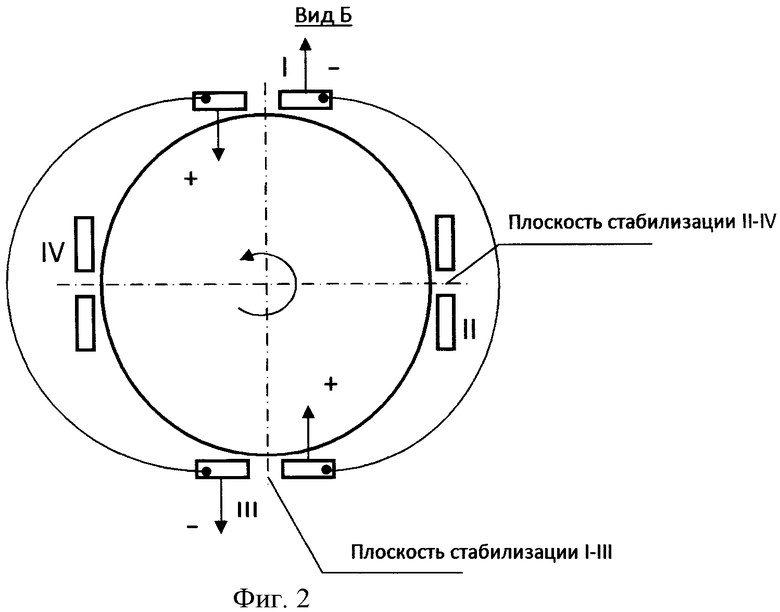
Управление по тангажу осуществляется подачей командных сигналов системы управления на электромагниты управления (1) и (2) - положительного значения, а на электромагниты (3) и (4) - отрицательного значения. Вследствие этого истекающий поток будет отклоняться относительно оси симметрии ЛА в сторону сечения III. При этом нос (головная часть) ЛА уходит вниз.
Управление по рысканью осуществляется подачей командных сигналов системы управления на электромагниты управления (3) и (4) - положительного значения, а на электромагниты (7) и (8) - отрицательного значения. Вследствие этого истекающий поток будет отклоняться относительно оси симметрии ЛА в сторону сечения IV. При этом нос (головная часть) ЛА уходит влево.
Управление по крену осуществляется подачей командных сигналов системы управления на электромагниты управления, расположенные в плоскости симметрии I-III, (1) и (5) - положительного значения, а на электромагниты (2) и (6) - отрицательного значения. Аналогично управление производится с использованием электромагнитов (3), (4), (7), (8), расположенных в плоскости симметрии II-IV.
Вследствие этого истекающий поток будет закручиваться против часовой стрелки относительно продольной оси симметрии ЛА. При этом корпус ЛА также будет поворачиваться на определенный угол против часовой стрелки вокруг продольной оси симметрии ЛА.
Поворот корпуса по часовой стрелке производится сменой знака управляющего сигнала на электромагнитах.
Вместе с этим, управлением ЛА по крену может производиться двумя малогабаритными двигателями, установленными в плоскости, например, II-IV. При этом отклонение потока плазмы относительно оси симметрии малогабаритных двигателей должно производиться в плоскости симметрии I-III, параллельной плоскости I-III ЛА в направлении сечения I при подаче командного сигнала системой управления на электромагниты управления, расположенные в сечении I малогабаритного двигателя отрицательного значения, а на управляющие электромагниты сечения III - положительного значения.
Таким образом, управление вектором тяги двигателя достигается не наклоном оси подвижной части сопла относительно вектора движения потока истекающего газа, а отклонением массивной положительно заряженной части потока истекающего газа относительно оси сопла реактивного двигателя под воздействием магнитных полей управляющих электромагнитов, расположенных в плоскостях симметрии I-III и II-IV.
Задачами заявляемого устройства управления вектором тяги реактивного двигателя летательного аппарата являются:
1. Упрощение конструкции сопел реактивного двигателя за счет замены управляющих (подвижных) сопел стационарными.
2. Уменьшение веса реактивного двигателя.
Решение указанных задач достигается за счет исключения из конструкции сопла реактивного двигателя:
- электрогидравлических или электромеханических рулевых приводов, обеспечивающих отклонение подвижного сопла, и элементов их крепления;
- элементов подвески подвижной части сопла, герметизации и термоизоляции подвески;
- аккумуляторных батарей или других бортовых источников для рулевых приводов управляющих сопел ЛА.
Техническим результатом решения указанных задач является соответственно:
1. Повышение надежности работы реактивного двигателя летательного аппарата за счет исключения механических узлов из конструкции реактивного двигателя.
2. Увеличение дальности полета при равном количестве топлива за счет уменьшения веса конструкции реактивного двигателя.
Новизна технического решения заключается в том, что изменение направления вектора тяги РД происходит вследствие воздействия электромагнитами управления на истекающий из сопла поток продуктов сгорания топлива, представляющий собой ионизированный газ (плазму), за счет температуры горения топлива (термической ионизации). Температура продуктов сгорания находится в пределах от 3500°C градусов Цельсия в камере сгорания и до 1500°C градусов Цельсия на выходном срезе сопла. При этом масса потока положительных ионов на несколько порядков выше массы электронов.
Перечень фигур чертежей
Краткое описание чертежа
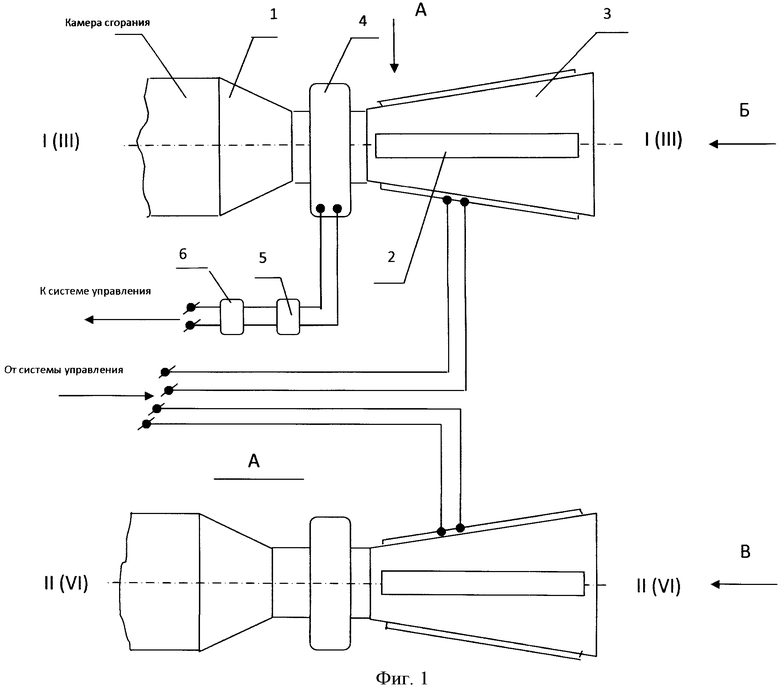
Конструктивная схема устройства представлена на фиг.1 и фиг.2. На стационарном сопле (1) установлены парные электромагниты управления (2) в виде, например, продольных полос вдоль образующей закритической части на внешней поверхности раструба (3), в плоскостях симметрии I-III и II-IV.
С целью получения электрического тока, необходимого для подачи на электромагниты управления вектором тяги сопла, по течению потока плазмы в его поперечном сечении, например в критическом сечении, установлен МГД-генератор (4). Электрический ток, вырабатываемый МГД-генератором, проходит через выпрямитель (5) и стабилизатор (6).
При этом на парные электромагниты управления (2), установленные в плоскости симметрии I-III или II-IV, подается электрический ток противоположных знаков по командным сигналам системы управления летательным аппаратом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ РЕАКТИВНОГО ДВИГАТЕЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2504683C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ПОТОКОМ В ОБЪЕМЕ СОПЛА РЕАКТИВНОГО ДВИГАТЕЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2323137C1 |
| Способ создания электрореактивной тяги | 2016 |
|
RU2635951C1 |
| ИОННЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ И СПОСОБ ЕГО РАБОТЫ | 2019 |
|
RU2738136C1 |
| Летательный аппарат короткого взлета и посадки с газодинамическим управлением | 2018 |
|
RU2711760C2 |
| ИОННЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ И СПОСОБ ЕГО РАБОТЫ | 2019 |
|
RU2724375C1 |
| Способ вращения цилиндров, выполняющих роль крыльев на летательных аппаратах, и беспилотный летательный аппарат для его осуществления | 2024 |
|
RU2826746C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ | 2008 |
|
RU2391546C1 |
| СПОСОБ СОЗДАНИЯ ЭЛЕКТРОРЕАКТИВНОЙ ТЯГИ | 2016 |
|
RU2633075C1 |
| ИОННЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ, СПОСОБ ЕГО РАБОТЫ И КОРОНИРУЮЩИЙ ЭЛЕКТРОД | 2020 |
|
RU2761693C1 |
Устройство управления вектором тяги реактивного двигателя (РД) включает истекающий из камеры сгорания топлива поток плазмы вдоль сопла Лаваля, продольные парные электромагниты управления, установленные на внешней поверхности расширяющейся части сопла, МГД-генератор электрического тока, установленный в самом узком (критическом) сечении сопла, стабилизатор и выпрямитель электрического тока, и система управления летательного аппарата (ЛА), управляющая электромагнитами. Управление вектором тяги РД достигается отклонением относительно оси симметрии сопла истекающего из камеры сгорания потока плазмы вследствие изменения напряженности электромагнитного поля, которое создается электромагнитами управления. Поток плазмы, как известно, состоит из положительно заряженных ионов и электронов. При этом масса ионов на несколько порядков превышает массу электронов. Вследствие этого направление вектора тяги определяется направлением движения потока ионов. Использование устройства и его составляющих частей позволит значительно упростить конструкцию ЛА вследствие замены управляющих сопел стационарными, а также исключить рулевой привод, бортовые источники питания рулевого привода и тем самым значительно уменьшить вес и увеличить надежность работы РД и, как следствие, в целом летательного аппарата. 3 з.п. ф-лы,2 ил.
1. Устройство управления вектором тяги сопла реактивного двигателя летательного аппарата, отличающееся тем, что для изменения направления вектора тяги отклоняется относительно оси симметрии поток истекающих из сопла газов, состоящих из плазмы (ионов и электронов), посредством воздействия на него парными электромагнитами управления в виде, например, полос, установленных вдоль образующей закритической части на внешней поверхности раструба в плоскостях симметрии I-III и II-IV, при этом на парные электромагниты управления подается электрический ток противоположных знаков по командному сигналу системы управления летательным аппаратом.
2. Устройство управления вектором тяги по п.1, отличающееся тем, что для управления летательным аппаратом по крену на парные электромагниты управления, установленные в плоскостях симметрии I-III и II-IV, подаются соответствующие командные сигналы управления, обеспечивающие закрутку потока и поворот корпуса относительно продольной оси симметрии летательного аппарата.
3. Устройство управления вектором тяги по п.1, отличающееся тем, что для управления летательным аппаратом по крену в плоскостях симметрии I-III и II-IV установлены парные малогабаритные двигатели управления с аналогичной системой управления потоком истекающих газов для создания крутящего момента относительно продольной оси симметрии летательного аппарата.
4. Устройство управления вектором тяги по п.1, отличающееся тем, что для получения электрического тока, необходимого для подачи на электромагниты управления вектором тяги, на сопло установлен МГД-генератор индукционного типа.
| СПОСОБ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ РЕАКТИВНОГО ДВИГАТЕЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2504683C1 |
| ВИХРЕВОЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 2006 |
|
RU2300007C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ВЕКТОРА ТЯГИ ЭЛЕКТРОРАКЕТНОГО ДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2196396C2 |
| US 0006334302 B1, 01.01.2002 | |||
| Способ селективного контроля глубины и качества поверхностного упрочнения изделий из ферромагнитных материалов | 2022 |
|
RU2782884C1 |

