Изобретение относится к измерительным устройствам и может быть использовано в интегральных линейных и угловых акселерометрах и гироскопах в качестве датчика перемещений.
Известен датчик перемещений [1], в котором применяются дифференциальные магниторезисторы, связанные с чувствительным элементом, синхронный детектор и запоминающая ячейка.
Недостатком известного устройства является низкая точность, связанная с тем, что при наличии двух движений подвижного узла вместе с подвижным электродом, например линейного или углового, эти движения взаимно влияют друг на друга, внося тем самым погрешность в измерения.
Наиболее близким в заявляемому изобретению является преобразователь перемещений [2], содержащий два неподвижных проводящих электрода, выполненных на изоляционных обкладках, которые размещены симметрично с зазорами относительно неподвижного электрода.
Недостатком данного устройства является то, что в нем отсутствует разделение составляющих перемещения, например линейного и углового, что в конечном итоге вносит погрешность в измерения.
Задачей, на решение которой направлено заявляемое изобретение, является усовершенствование конструкции преобразователя перемещений.
Технический результат заключается в повышении точности нулевого сигнала преобразователя перемещений.
Технический результат достигается за счет того, что в магниторезистивный датчик перемещений, выполненный на основе гигантского магниторезистивного эффекта, содержащий пластину проводящего монокремния, в которой с помощью анизотропного травления выполнен подвижный объект, на одном из концов которого размещен дискретный источник магнитного поля, четырехслойную магниторезистивную структуру, состоящую из первого свободного ферромагнитного слоя, второго проводящего немагнитного слоя, третьего зафиксированного ферромагнитного слоя и четвертого антиферромагнитного слоя, расположенную на одной из сторон пластины проводящего монокремния против дискретного источника магнитного поля через зазор, отделяющий подвижный объект от пластины проводящего монокремния, согласно изобретению дополнительно введены дискретный источник магнитного поля и четырехслойная магниторезистивная структура, дискретные источники магнитного поля расположены на разных сторонах конца подвижного объекта против четырехслойных магниторезистивных структур, размещенных на разных сторонах пластины проводящего монокремния, при этом два свободных и два зафиксированных ферромагнитных слоя соединены в четырехплечий мост.
К существенным отличиям заявленного изобретения по сравнению с прототипом является дополнительное введение в структуру МРДТ дискретного источника магнитного поля и четырехслойной магниторезистивной структуры, что позволяет более точно измерять нулевой сигнал преобразователя перемещений посредством усовершествования его конструкции.
Пример реализации заявленного изобретения.
Рассмотрим фиг.1, на которой изображена схема магниторезистивного датчика перемещений. Магниторезистивный датчик перемещений состоит из пластины 1 монокремния, на которой с разных сторон размещены две четырехслойные магниторезистивные структуры 2, подвижного объекта 4, на конце подвижного объекта 4 с разных сторон размещены два дискретных источника 3 магнитного поля против четырехслойных магниторезистивных структур 2. Упругий подвес 5 может быть выполнен как для работы на изгиб, так и на кручение. Ось 6 качания подвижного объекта также может быть выбрана произвольно. В любом случае подвижный объект совершает сложное линейное движение от прогибов и угловое от поворотов.
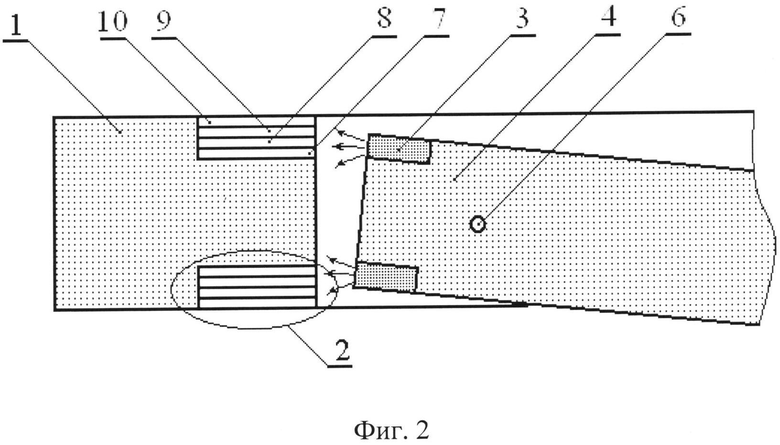
Рассмотрим фиг.2, на которой представлен увеличенный фрагмент заявляемого магниторезистивного датчика перемещений. Две четырехслойные магниторезистивные структуры 2 размещены сверху и снизу пластины 1 монокремния. Все слои наносятся вакуумным напылением на изоляционную подложку толщиной не менее 0,1 микрометра. Четырехслойная магниторезистивная структура 2 состоит из четырех слоев: первого слоя 7 - свободного ферромагнетика, изготовленного из материала Ni18Fe19, второго слоя 8 - тонкого разделительного слоя, изготовленного из немагнитного проводника, третьего слоя 9 - зафиксированного (жесткого) ферромагнетика, изготовленного из сплава кобальта и никеля CoNi, и четвертого слоя 10 - антиферромагнитного слоя, изготовленного из окиси никеля NiO, предназначенного для удержания намагниченности жесткого ферромагнетика. Намагничивание жесткого ферромагнетика осуществляется при его изготовлении. Дискретные источники 3 магнитного поля, расположенные на конце подвижного объекта 4, могут совершать угловые перемещения относительно оси 6 качания.
Рассмотрим работу магниторезистивного датчика перемещений, выполненного на основе гигантского магниторезистивного эффекта (ГМРЭ). Типичные изменения сопротивления анизотропных магниторезисторов составляют порядка 2…4%. Изменения более 10% были получены при использовании металлов с планарной структурой, а эффект был назван гигантским магниторезистивным эффектом (ГМРЭ). Устройства на базе ГМРЭ находят широкое применение в считывающих головках в компьютерной технике. В интегральных датчиках ГМРЭ используется в качестве преобразователя углового перемещения. Наиболее эффективно ГМРЭ реализуется в виде структуры из четырех слоев толщиной менее 0,1 микрометра.
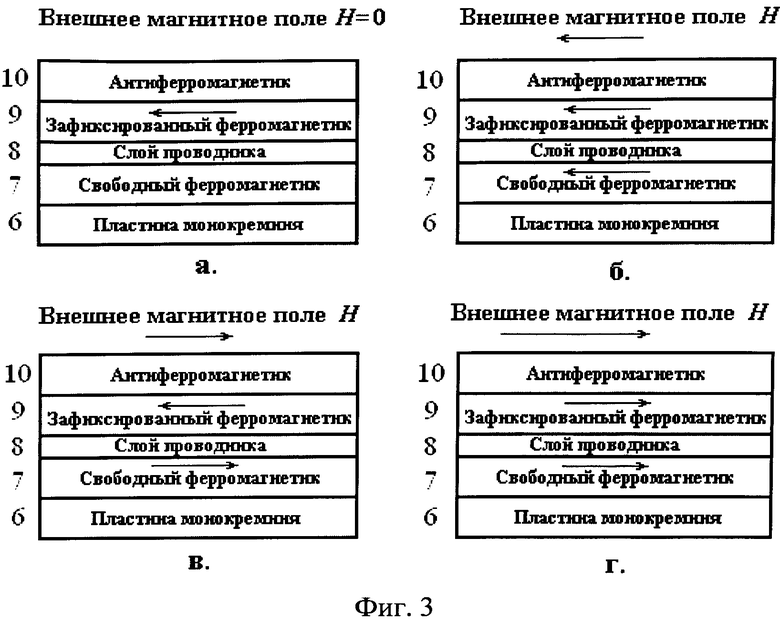
На фиг.3 (а, б, в, г) показаны четыре возможных состояния структуры на основе ГМРЭ и ее реакция на внешнее поле. Одно из них, нейтральное положение подвижного электрода, изображено на фиг.3 (а). Такое же состояние имеет структура и при симметричном воздействии дискретных источников магнитного поля на свободные ферромагнетики. При этом сопротивления свободных ферромагнетиков на разных сторонах пластины монокремния одинаковы.
При несимметричном воздействии дискретных источников магнитного поля на свободные ферромагнетики, изображенные на фиг.3 (б) и фиг.3 (в), величины сопротивлений свободных ферромагнетиков становятся разными и зависят от угла поворота. При этом для верхнего и нижнего свободных ферромагнетиков полярность дискретных источников магнитного поля в одном и том же преобразователе должна быть одинаковой.
Состояние структуры, изображенной на фиг.3 (г), при котором магнитное поле дискретных источников имеет напряженность, превышающую полную напряженность поля анизотропии, в заявляемом устройстве не используется.
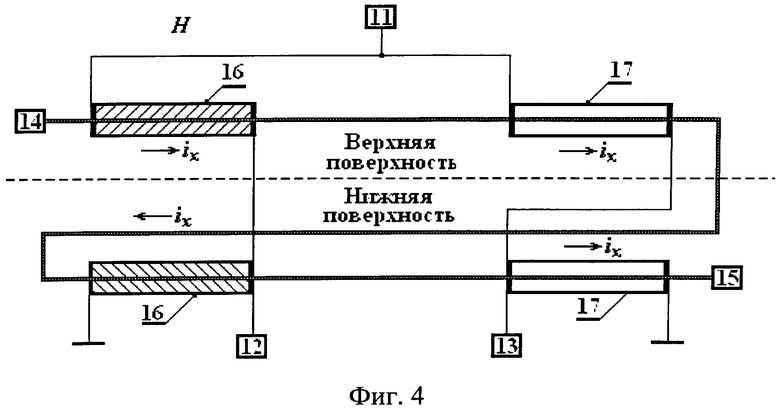
Рассмотрим фиг.4. В связи с тем что рабочие свободные магниторезисторы (16) и зафиксированные магниторезисторы (17), выполненные в виде свободных и зафиксированных ферромагнитных слоев соответственно, обладают сильной зависимостью от температуры, измерительные цепи их включают в противоположные плечи мостовой схемы. Плечи моста выполняют по аналогичной магниторезистивной четырехслойной структуре. Рабочие свободные магниторезисторы на схеме показаны косой штриховкой. Для изменения направления тока в свободных магниторезисторах они включены встречно. Зафиксированные магниторезисторы включены последовательно с одним направлением тока.
Контактная площадка 11 предназначена для подвода внешнего питания Uп мостовой схемы. Контактные площадки 12 и 13 являются выходными для измерительной диагонали моста. Поверх всех плеч моста проходит управляющая напыленная обмотка с контактными площадками 14 и 15. Ток в управляющей обмотке предназначен для компенсации внутренней напряженности магнитного поля материала. При слабом внешнем магнитном поле Ну<<Hk и при скомпенсированной внутренней напряженности Н0 магнитного поля материала зависимость выходного напряжения моста является линейной:

где Θ - угол между вектором Js намагничивания и осью х легкого намагничивания; Ну - напряженность магнитного поля точечного источника на подвижном объекте; Hk=Н0+Jst/w - полная напряженность поля анизотропии, представляющая собой сумму внутренней напряженности примененного материала и геометрической составляющей; Н0 - внутренняя напряженность магнитного поля материала; t и w - толщина и ширина магниторезистивной полоски.
Анализируя оценочную формулу (1), можно заключить, что толщину магниторезистивной полоски можно выполнить на уровне наноразмеров. Следовательно, чувствительность магниторезистивного датчика перемещений, выполненного на основе гигантского магниторезистивного эффекта, превосходит чувствительность всех известных датчиков перемещений, например емкостных. В свою очередь, от чувствительности преобразователя перемещений зависит повышение точности нулевого сигнала.
Источники информации
1. Вавилов В.Д. Интегральные датчики. Изд-во НГТУ, 2003, 504 с.
2. Дитмауэр К. Магнитные датчики на базе анизотропного магниторезистивного эффекта. - М.: Экспресс-информация, «Контрольно-измерительная техника». №9, 2009, с.13-25.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комбинированный магниторезистивный датчик | 2015 |
|
RU2630716C2 |
| Способ изготовления магниторезистивных наноструктур | 2021 |
|
RU2767593C1 |
| МАГНИТОРЕЗИСТИВНЫЙ ДАТЧИК | 2012 |
|
RU2495514C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ С ГИГАНТСКОЙ МАГНИТОРЕЗИСТИВНОСТЬЮ И ЕГО ПРИМЕНЕНИЕ | 2003 |
|
RU2328015C2 |
| СПОСОБ ФОРМИРОВАНИЯ МАГНИТОРЕЗИСТИВНОГО ЭЛЕМЕНТА ПАМЯТИ НА ОСНОВЕ ТУННЕЛЬНОГО ПЕРЕХОДА И ЕГО СТРУКТУРА | 2012 |
|
RU2522714C2 |
| МАГНИТОРЕЗИСТИВНЫЙ ДАТЧИК | 2014 |
|
RU2561762C1 |
| МАГНИТНЫЙ НЕЙРОН | 2001 |
|
RU2199780C1 |
| СПОСОБ МАГНИТНОЙ КРИПТОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2778689C1 |
| ВСТРАИВАЕМАЯ С СБИС ТЕХНОЛОГИИ КМОП/КНИ ПАМЯТЬ "MRAM" И СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ (ВАРИАНТЫ) | 2012 |
|
RU2532589C2 |
| МИКРОЭЛЕКТРОМЕХАНИЧЕСКИЙ ДАТЧИК МИКРОПЕРЕМЕЩЕНИЙ С МАГНИТНЫМ ПОЛЕМ | 2012 |
|
RU2506546C1 |
Изобретение относится к измерительным устройствам и может быть использовано в интегральных линейных и угловых акселерометрах и гироскопах в качестве датчика перемещений. Технический результат: повышение точности нулевого сигнала преобразователя перемещений. Сущность: магниторезистивный датчик содержит пластину проводящего монокремния, в которой с помощью анизотропного травления выполнен подвижный объект. На разных сторонах конца подвижного объекта размещены дискретные источники магнитного поля, которые расположены напротив четырехслойных магниторезистивных структур, размещенных на разных сторонах пластины проводящего монокремния. Четырехслойные магниторезистивные структуры состоят из первого свободного ферромагнитного слоя, второго проводящего немагнитного слоя, третьего зафиксированного ферромагнитного слоя и четвертого антиферромагнитного слоя. Два свободных и два зафиксированных ферромагнитых слоя соединены в четырехплечий мост. 4 ил.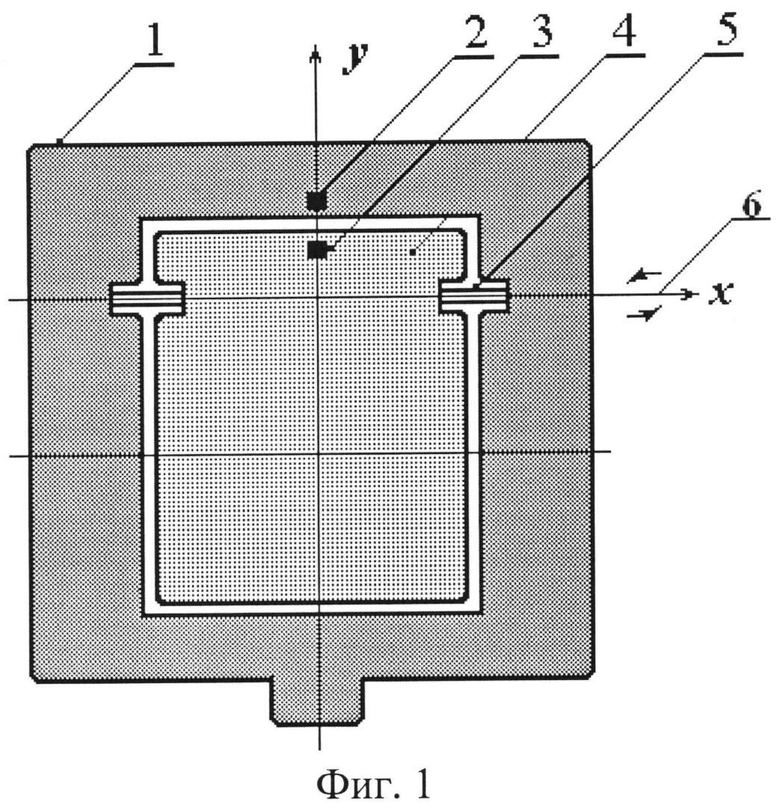
Магниторезистивный датчик перемещений, выполненный на основе гигантского магниторезистивного эффекта, содержащий пластину проводящего монокремния, в которой с помощью анизотропного травления выполнен подвижный объект, на одном из концов которого размещен дискретный источник магнитного поля, четырехслойную магниторезистивную структуру, состоящую из первого свободного ферромагнитного слоя, второго проводящего немагнитного слоя, третьего зафиксированного ферромагнитного слоя и четвертого антиферромагнитного слоя, расположенную на пластине проводящего монокремния против дискретного источника магнитного поля через зазор, отделяющий подвижный объект от пластины проводящего монокремния, отличающийся тем, что в магниторезистивный датчик перемещений дополнительно введены дискретный источник магнитного поля и четырехслойная магниторезистивная структура, дискретные источники магнитного поля расположены на разных сторонах конца подвижного объекта против четырехслойных магниторезистивных структур, размещенных на разных сторонах пластины проводящего монокремния, при этом свободные и зафиксированные ферромагнитные слои соединены в четырехплечий дифференциальный мост.
| МАГНИТОРЕЗИСТИВНЫЙ ДАТЧИК | 2010 |
|
RU2436200C1 |
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1996 |
|
RU2110045C1 |
| US 6507187 B1, 14.01.2003 | |||
| EP 1918678 A2, 07.05.2008 | |||
| US 4403187 A, 06.09.1983 | |||

