Изобретение относится к измерительной технике.
Известен датчик угла поворота вала, содержащий два кольцевых магнитопровода, установленных соосно и разделенных зазором, первый из которых содержит равномерно расположенные по окружности зубцы, обращенные в сторону зазора, кольцевой постоянный магнит, магниточувствительные элементы, в датчик введены дополнительные магниточувствительные элементы, кольцевые магниты выполнены П-образными и установлены торцами друг к другу, на одном из торцов первого кольцевого магнитопровода установлен кольцевой постоянный магнит, а другой торец выполнен зубчатым, на одном торце второго кольцевого магнитопровода, сопряженном с зубчатым торцом первого кольцевого магнитопровода, установлены магниточувствительные элементы, которые объединены в группы, магниточувствительные элементы каждой из групп равномерно распределены по окружности, смещены относительно магниточувствительных элементов соседней группы на четверть зубцового деления и соединены между собой последовательно, при этом магниточувствительные элементы могут быть выполнены в виде магниторезистивной матрицы, в которой магниторезисторы расположены на общей магнитомягкой подложке [1].
Известный датчик отличается сложностью конструкции и недостаточной чувствительностью.
Наиболее близким по технической сущности и достигаемому результату к изобретению является датчик угловых перемещений, содержащий неподвижный магнитопровод с выступами, размещенные на них магниточувствительные элементы и установленный в зазоре между выступами магнитопровода ферромагнитный ротор с закрепленным на нем постоянным магнитом, постоянный магнит установлен на оси ротора, намагничен радиально, выполнен с поперечным сечением, ограниченным двумя симметрично расположенными участками спирали Архимеда,и имеет продольное сечение в виде равнобедренной трапеции, меньшее основание которой расположено в области участка спирали Архимеда с наибольшим радиусом кривизны [2].
Однако данный датчик обладает недостаточными функциональными возможностями, так как не позволяет осуществлять одновременное измерение угла поворота второго вала. Кроме того, он обладает недостаточной чувствительностью.
Задачей изобретения является повышение чувствительности и расширение функциональных возможностей датчика угловых перемещений за счет одновременного измерения угла поворота второго соосно расположенного вала.
Для этого датчик угловых перемещений, содержащий магнитопровод с выступами, размещенные на них магниточувствительные элементы и установленный в зазоре между выступами магнитопровода ферромагнитный ротор с закрепленным на нем постоянным магнитом, постоянный магнит установлен на оси ротора, намагничен радиально, выполнен с поперечным сечением, ограниченным двумя симметрично расположенными участками спирали Архимеда, снабжен дополнительным ротором, расположенным соосно в основным ротором, постоянный магнит имеет продольное сечение в виде прямоугольного треугольника, меньший катет которого расположен в области участков спирали Архимеда с наименьшим радиусом кривизны, а гипотенуза обращена в сторону магнитопровода, магнитопровод датчика установлен на основном ферромагнитном роторе посредством подшипника качения и жестко соединен с дополнительным ротором.
Такое выполнение датчика позволяет повысить точность за счет повышения чувствительности и расширить функциональные возможности датчика за счет одновременного измерения угла поворота другого соосно расположенного вала.
На фиг. 1 схематично показано конструктивное выполнение датчика угловых перемещений; на фиг.2 - сечение А-А на фиг.1.
Датчик угловых перемещений содержит магнитопровод 1, на выступах которого размещены магниточувствительные элемента (МЧЭ) 2 и 3, например магниторезисторы, включенные по мостовой схеме измерения (не показана). В зазоре между выступами магнитопровода 1 установлен ферромагнитный ротор 4 с закрепленным на нем постоянным магнитом 5. В процессе измерения ротор 4 кинематически связывается с объектом контроля. Магнит 5 намагничен радиально, установлен на оси ротора и выполнен с поперечным сечением, ограниченным двумя симметрично расположенными участками спирали Архимеда,и имеет продольное сечение в виде прямоугольного треугольника, меньший катет которого расположен в области участков спирали Архимеда с наименьшим радиусом кривизны, а гипотенуза обращена в сторону магнитопровода.
Датчик снабжен дополнительным ротором 6, расположенным соосно с основным ротором 4.
Магнитопровод 1 датчика посредством подшипника 7 качения установлен на роторе 4 и жестко соединен с дополнительным ротором 6.
Датчик угловых перемещений работает следующим образом
При повороте одного из роторов 4 или 6 изменяются величины зазоров между постоянным магнитом 5 ротора 4 и МЧЭ 2 и 3 датчика. При этом величина зазора между одним из МЧЭ, например 2, и магнитом 5 уменьшается, а его площадь увеличивается, а между другим МЧЭ, например 3, и магнитом 5 зазор увеличивается, а его площадь уменьшается, вследствие чего изменяются магнитные проводимости этих зазоров в области размещения МЧЭ во взаимно противоположных направлениях. Изменение проводимости воздушных зазоров, а следовательно,и магнитных потоков, проходящих через МЧЭ в зависимости от угла поворота роторов 4 или 6, вызывает изменение сигналов на их выходах, например изменение сопротивления магниторезисторов, происходящее линейно в зависимости от угла поворота роторов 4 или 6.
При одновременном повороте роторов 4 и 6 сигнал на выходе датчика будет пропорционален алгебраической сумме углов поворота роторов 4 и 6.
Выполнение постоянного магнита с продольным сечением в виде прямоугольного треугольника имеет преимущества по сравнению с продольным сечением в виде равнобедренной трапеции.
При повороте ротора (сечение в виде трапеции) происходит линейное изменение величины зазора как на горизонтальных участках большого и малого оснований, так и на боковых участках трапеции.
При этом на одном из горизонтальных участков зазора будет, например, увеличиваться как по ширине (за счет уменьшения боковых участков), так и по длине. Когда угол поворота достигнет 180o, величина зазора на этом горизонтальном участке и по ширине и по длине станет максимальной, а на боковых участках станет равной нулю. Очевидно, что если величину малого основания уменьшить до нуля, то трапеция выродится в равнобедренный треугольник. При этом приведенные выше рассуждения будут справедливы и для треугольника (не обязательно равнобедренного), с той лишь разницей, что при повороте магнита на 180o величина зазора на горизонтальном участке также будет изменяться в пределах от нуля до максимума, как и на боковых участках.
Продольное сечение магнита в виде треугольника позволяет получить больший диапазон изменения величины зазора по длине и поэтому более эффективно. При прямоугольной форме треугольника угол наклона гипотенузы к магнитопроводу всегда больше угла наклона боковых сторон трапеции. Поэтому величина потоков рассеивания в первом случае будет меньше, чем во втором. За счет этого увеличивается полезный магнитный поток, проходящий через магниторезисторы, что повышает чувствительность датчика.
Благодаря особенностям конструктивного выполнения постоянного магнита 5 обеспечивается большее увеличение градиента проводимости, и следовательно, более интенсивное изменение сигнала на выходе датчика, что повышает его чувствительность и точность измерения углов поворота.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2139495C1 |
| Датчик угловых перемещений Е.П.Абрамцева | 1985 |
|
SU1315790A1 |
| Датчик угловых перемещений | 1989 |
|
SU1620815A1 |
| Механизм преобразования вращательного движения в сложное | 1989 |
|
SU1657804A1 |
| ДАТЧИК ПЕРЕМЕЩЕНИЙ ТРАНСФОРМАТОРНОГО ТИПА | 1991 |
|
RU2031358C1 |
| Датчик угла поворота | 1986 |
|
SU1325296A1 |
| ТРАНСФОРМАТОРНЫЙ ДАТЧИК ПОЛОЖЕНИЯ | 1997 |
|
RU2127866C1 |
| ТРАНСФОРМАТОРНЫЙ ДАТЧИК УГЛА ПОВОРОТА ДВУХ ВАЛОВ | 1991 |
|
RU2010156C1 |
| ТРАНСФОРМАТОРНЫЙ ДАТЧИК УГЛА ПОВОРОТА ВАЛА | 1997 |
|
RU2145053C1 |
| Трансформаторный датчик угла поворота двух объектов | 1991 |
|
SU1810747A1 |

Изобретение предназначено для использования в измерительной технике. Датчик содержит магнитопровод 1, на выступах которого размещены магниточувствительные элементы (МЧЭ) 2 и 3, включенные по мостовой схеме измерения. В зазоре между выступами магнитопровода 1 установлен ферромагнитный ротор 4, на оси которого закреплен постоянный магнит 5. Магнит 5 выполнен с поперечным сечением, ограниченным двумя участками спирали Архимеда, и с продольным сечением в виде прямоугольного треугольника, меньший катет которого расположен в области спирали Архимеда с наименьшим радиусом кривизны, а гипотенуза обращена в сторону магнитопровода. Датчик снабжен дополнительным ротором 6, жестко соединенным с магнитопроводом 1. Магнит 5 намагничен радиально. При повороте роторов 4 или 6 дифференциально изменяются величины и площади зазоров между ротором 4 и МЧЭ 2 и 3, вследствие чего изменяются магнитные проводимости этих зазоров в противоположных направлениях. При одновременном повороте роторов 4 и 6 сигнал на выходе датчика пропорционален алгебраической сумме углов поворота контролируемых объектов. 2 ил.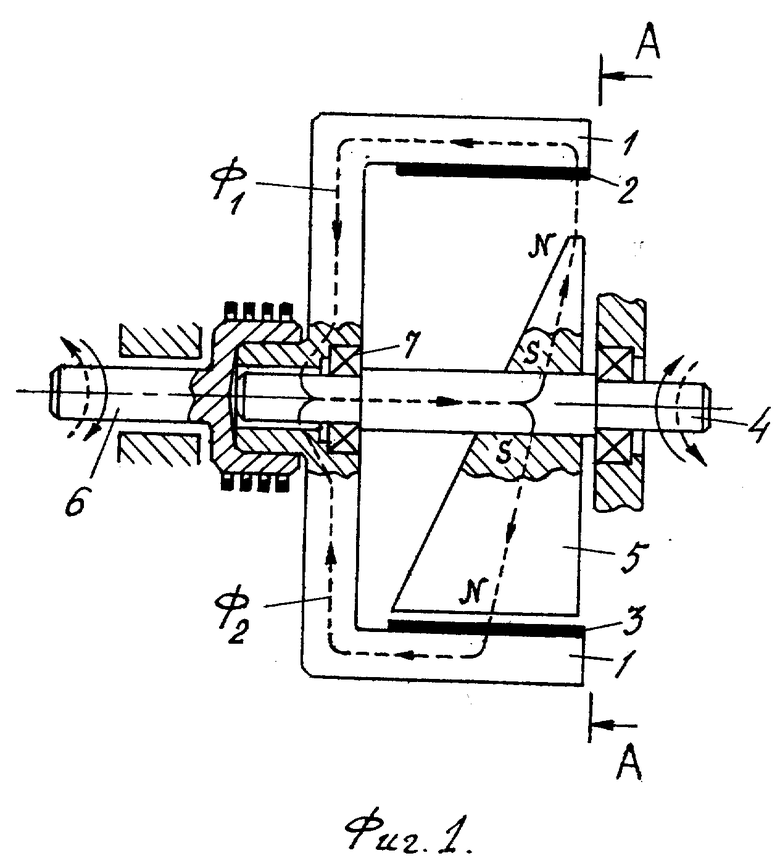
Датчик угловых перемещений, содержащий магнитопровод с выступами, размещенные на них магниточувствительные элементы и установленный в зазоре между выступами магнитопровода ферромагнитный ротор с закрепленным на нем постоянным магнитом, постоянный магнит установлен на оси ротора, намагничен радиально, выполнен с поперечным сечением, ограниченным двумя симметрично расположенными участками спирали Архимеда, отличающийся тем, что он снабжен дополнительным ротором, расположенным соосно с основным ротором, постоянный магнит выполнен с продольным сечением в виде прямоугольного треугольника, меньший катет которого расположен в области участков спирали Архимеда с наименьшим радиусом кривизны, а гипотенуза обращена в сторону магнитопровода, а магнитопровод датчика установлен на основном ферромагнитном роторе посредством подшипника качения и жестко соединен с дополнительным ротором.
| SU, авторское свидетельство, 773426, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство, 1315790, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

