Изобретение относится к горной промышленности и может быть использовано для управления процессом лазерного воздействия на скальные породы переменной крепости при подготовке горных пород к безвзрывному разупрочнению для последующего послойно-полосового фрезерования и выемки карьерными комбайнами.
Известны способы подготовки горных пород к выемке посредством предварительного взрывания массива, в том числе способ с циклично-поточной отработкой скальных горных пород, включающий обуривание на буровом блоке вертикальными или наклонными скважинами, зарядку скважин и взрывание их под укрытием на блоке подготовки пород к выемке, последующую выемку взорванной горной массы и погрузку ее на забойный конвейер через передвижной дробильный агрегат на выемочном блоке [1, 2].
Данные способы требуют значительной организационно-подготовительной работы согласно единым правилам безопасности ведения взрывных работ, не исключают влияния сейсмических волн, поражения кусками взрываемой горной массы элементов выемочного оборудования, транспорта и обслуживающего персонала, а также наносят значительный вред окружающей среде.
Известны способы подготовки массива к выемке за счет ослабления его под действием поверхностно-активных веществ (ПАВ). Способ [3] предусматривает разупрочнение горного массива с использованием раствора ПАВ, заливаемого в скважины, образованные в горном массиве. Скважины выполняют различной глубины и размещают в шахматном порядке, а раствор ПАВ заливают в объеме и концентрации согласно приведенным формулам. Способ отработки уступов горных пород [4] предусматривает выполнение сетки взрывных скважин с увеличенным расстоянием между ними и заливочных скважин. Заливочные скважины заполняют растворами ПАВ и после выдержки вновь доливают растворы или воду. Затем производят взрывание зарядов ВВ, выемочно-погрузочные и транспортные работы.
Способы с использованием ПАВ сопряжены со значительным объемом работ и загрязнением окружающей среды.
Известны способы с использованием лазерной энергии для бурения скважин в рыхлых горных породах или создания перфорационных щелей в обсадных колоннах, цементном камне и горной породе [5, 6]. Перфоратор лазерный гидравлический щелевой, предназначенный для создания перфорационных щелей в обсадных колоннах, цементном камне и горной породе, включает лазерный прибор с возможностью продольного перемещения вдоль колонны во время осуществления перфорации при постоянной подаче электроэнергии, снабженный лазерными окнами в нижней части, над которыми расположены гидромониторы с направляющими центраторами. Изобретение обеспечивает вскрытие продуктивных пластов последовательным выполнением нарезания щелей с помощью лазера и гидродинамического размыва породы [6].
Недостатком данного устройства, обеспечивающего нарезание щелей, является невозможность совмещения процессов нарезания щелей и непосредственного разрушения породы, что технологически снижает производительность процесса добычи.
Известно адаптивное регулирование привода фрезерной машины, которое снабжено системой продвижения строительной машины и измеряет противодействующие силы, прикладываемые поверхностью грунта к фрезерному барабану, и в ответ на измеренные изменения данных противодействующих сил регулирует движущую силу, подаваемую к движущему приводу машины, или замедляет скорость опускания вращающегося фрезерного барабана. Раннее и быстрое определение подобных изменений противодействующих сил позволяет системе управления содействовать предотвращению явлений крена вперед или назад, соответственно, строительной машины [7].
Способ имеет функциональные ограничения и не способен выполнять необходимые задачи.
Наиболее близким по технической сущности является способ лазерной обработки и устройство для его осуществления, при котором между обрабатываемой поверхностью и электродом, находящимся под положительным потенциалом, инициируют электрический разряд и по параметрам плазменного факела над зоной обработки контролируют интенсивность термического воздействия на эту зону лазерного излучения и дугового разряда, волновой фронт лазерного излучения деформируют, изменяя угол его расходимости при помощи адаптивного элемента. Устройство для лазерной обработки, содержащее лазер, фокусирующую систему, блок управления интенсивностью лазерного излучения, соединенный с лазером, неплавящийся электрод, соединенный с источником тока, снабжено микропроцессором, адаптивным элементом, установленным на оптической оси лазера перед фокусирующей системой, с блоком управления, блоком регистрации и анализа распределения энергии в зоне обработки, блоком управления электрическим разрядом, соединенным через микропроцессор с двумя последними блоками и фокусирующей системой [8].
Способ повышает качество обработки путем стабилизации энерговклада в зону обработки, но он не адаптируется к задаче эффективной обработки поверхности значительных размеров и формирования в приповерхностном слое обрабатываемого массива зон перекрытия лазерных щелей, обеспечивающих высокую концентрацию напряжений, знакопеременные нагрузки и деформацию при лазерной обработке значительной поверхности.
Технический результат заключается в повышении эффективности управления технологической подготовкой к выемке скальных пород путем регулирования энерговклада волнового фронта лазерного излучения в зону обработки и формирования в приповерхностном слое обрабатываемого массива равномерно расположенных зон перекрытия лазерных щелей без возможных просветов при изменении скорости продвижения комбайна в случае возникновения зон повышенной или пониженной прочности при послойно-полосовом фрезеровании скальных пород карьерными комбайнами.
Технический результат достигается тем, что в способе управления лазерной обработкой скальной породы переменной крепости, включающем контроль интенсивности высокотемпературного термодинамического лазерного воздействия на зону лазерного излучения, регулирование изменения волнового фронта лазерного излучения, осуществляют контроль усилия резания фрезы Р, параметров прочности f горной породы посредством датчика регистрации прочности горной породы, установленного на раме оптоволоконного лазерного излучателя, контроль скорости перемещения карьерного комбайна Vki, введение в программу алгоритма вычисления волнового фронта мощности лазерного излучения W в зависимости от параметров прочности f горной породы и шага позиционирования оптоволоконных излучателей li на основе уравнения
где B - ширина поперечного хода оптоволоконного лазерного излучателя, равная ширине фрезерования поверхности карьерного комбайна, м; Vл - скорость продольного перемещения оптоволоконного лазерного излучателя вдоль направляющих, м/с; n - число оптоволоконных излучателей в кассете; Vki - скорость перемещения карьерного комбайна, в зависимости от параметров прочности f горной породы и при изменении скорости перемещения карьерного комбайна Vki, в случае возникновения зон повышенной или пониженной крепости f при послойно-полосовом фрезеровании скальных пород, осуществляют регулирование энерговклада волнового фронта лазерного излучения в зону обработки посредством блока управления интенсивностью лазерного излучения и формирование в приповерхностном слое обрабатываемого массива равномерно расположенных многорядных зон перекрытия лазерных щелей без возможных просветов посредством привода перемещения оптоволоконных излучателей.
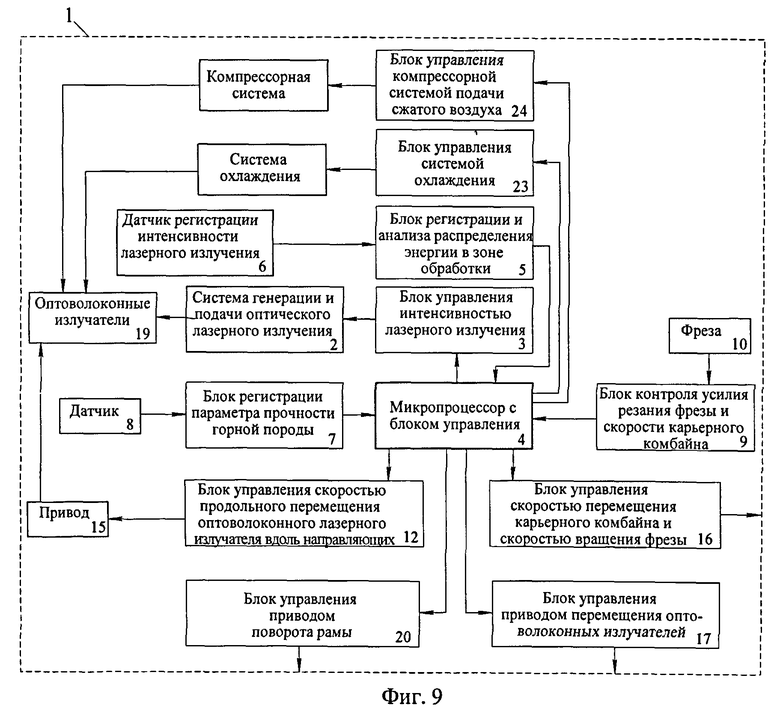
Система управления лазерной обработкой скальной породы переменной крепости, включающая систему генерации и подачи оптического лазерного излучения, блок управления интенсивностью лазерного излучения, соединенный с системой генерации и подачи оптического лазерного излучения, микропроцессор с блоком управления, блок регистрации и анализа распределения энергии в зоне обработки, снабжена датчиком регистрации интенсивности лазерного излучения, который соединен с блоком регистрации и анализа распределения энергии в зоне обработки, а также снабжена блоком регистрации параметра прочности горной породы, связанным с датчиком регистрации прочности горной породы, снабжена блоком контроля усилия резания фрезы и скорости перемещения карьерного комбайна, связанного с микропроцессором с блоком управления, который связан с блоком управления скоростью продольного перемещения оптоволоконного лазерного излучателя вдоль направляющих, блоком управления скоростью перемещения карьерного комбайна и скоростью вращения фрезы, блоком управления приводом перемещения оптоволоконных излучателей и блоком управления приводом поворота рамы, при этом микропроцессор с блоком управления связан с блоком регистрации и анализа распределения энергии в зоне обработки, блоком управления системой охлаждения и блоком управления компрессорной системой подачи сжатого воздуха для пылеудаления из зоны лазерной обработки.
Возможность формирования требуемой последовательности выполняемых действий новым способом и предложенными средствами позволяет решить поставленную задачу, определяет новизну, промышленную применимость и изобретательский уровень разработки.
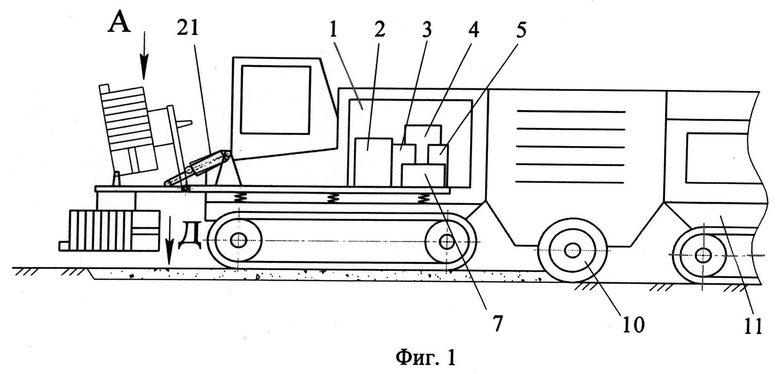
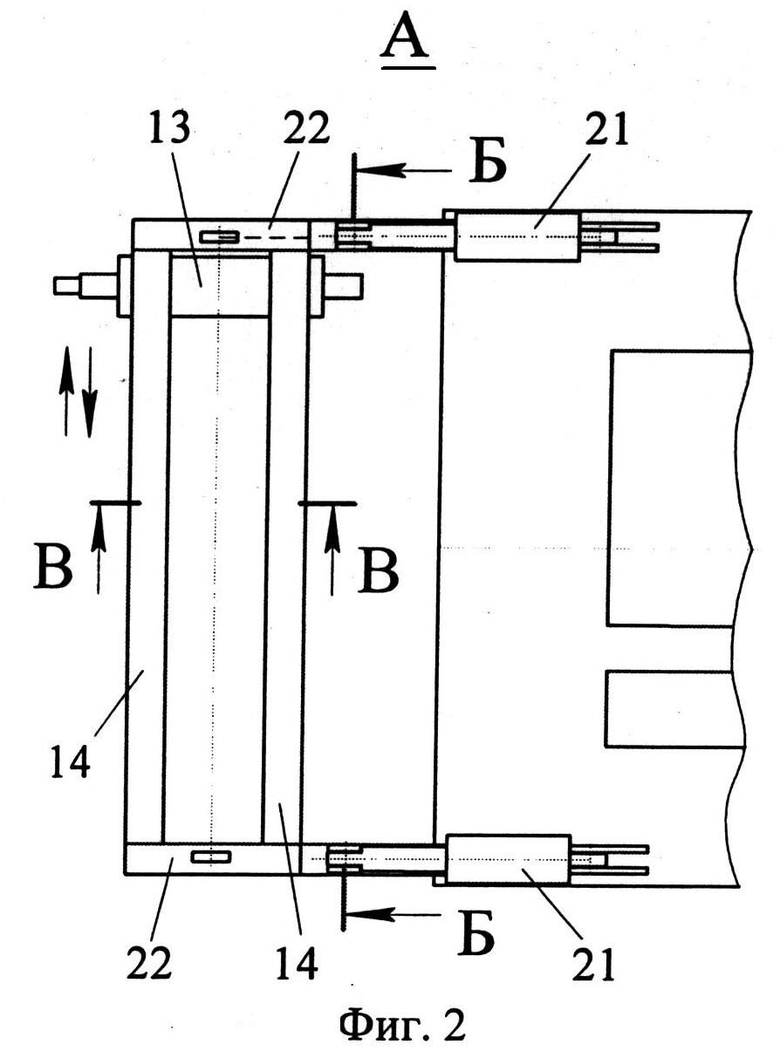
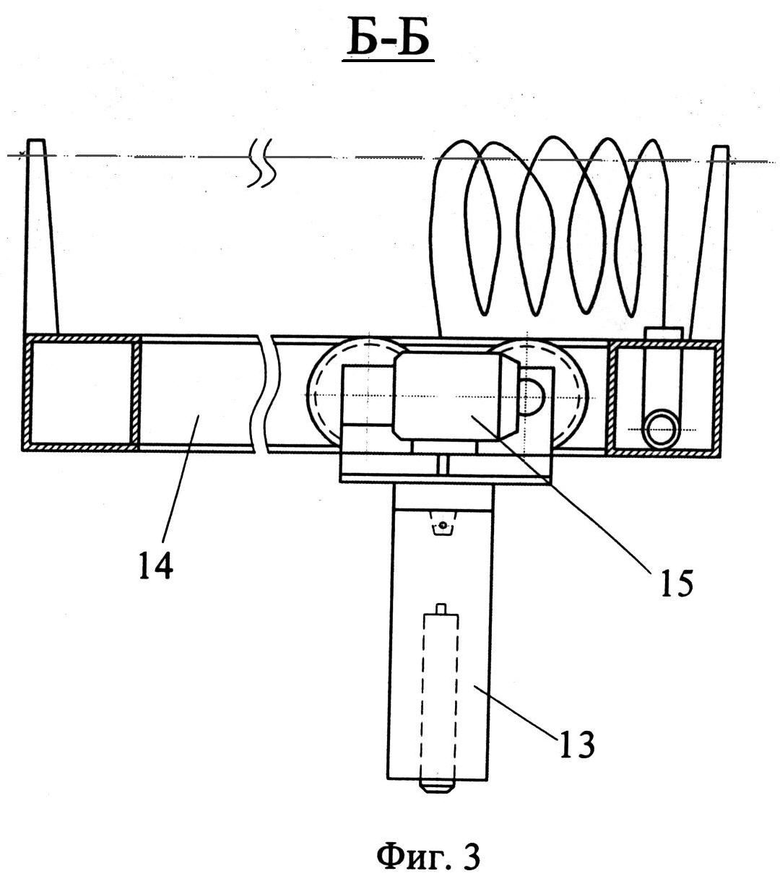
Система управления лазерной обработкой скальной породы переменной крепости изображена на чертежах.
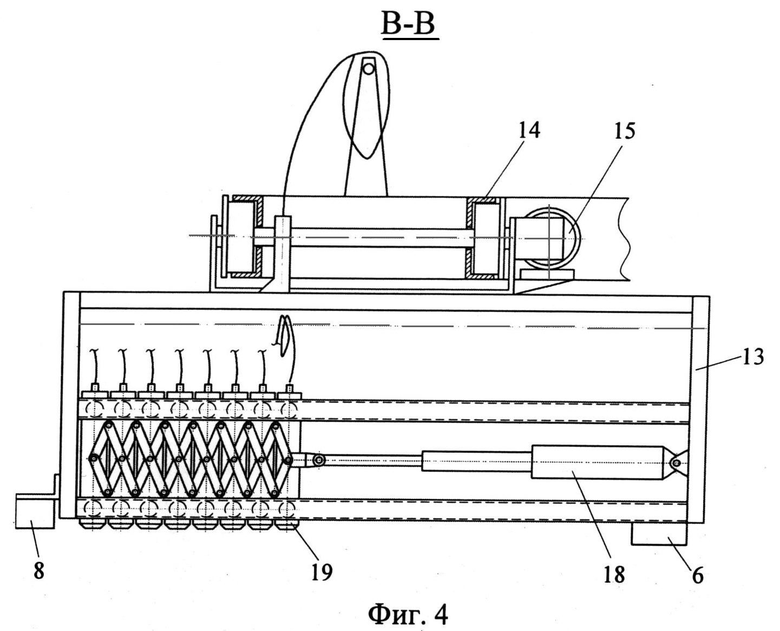
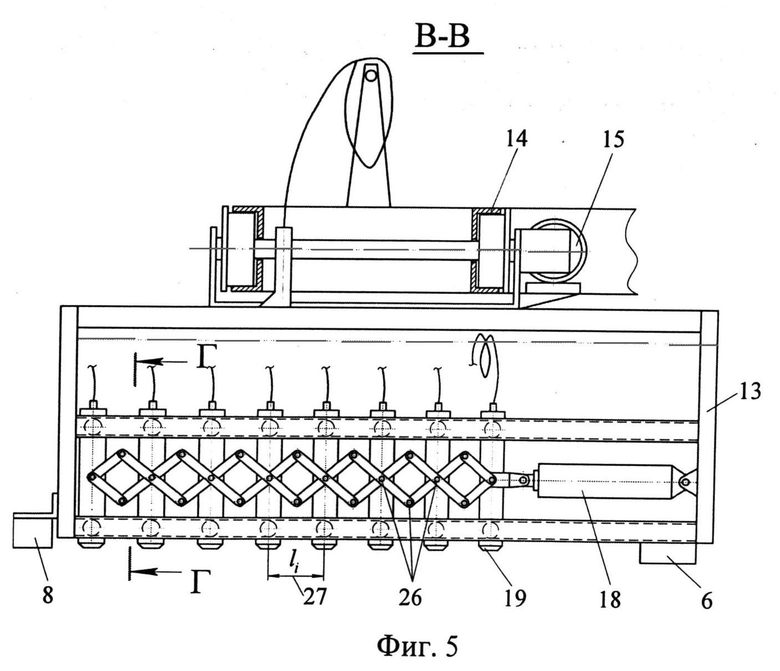
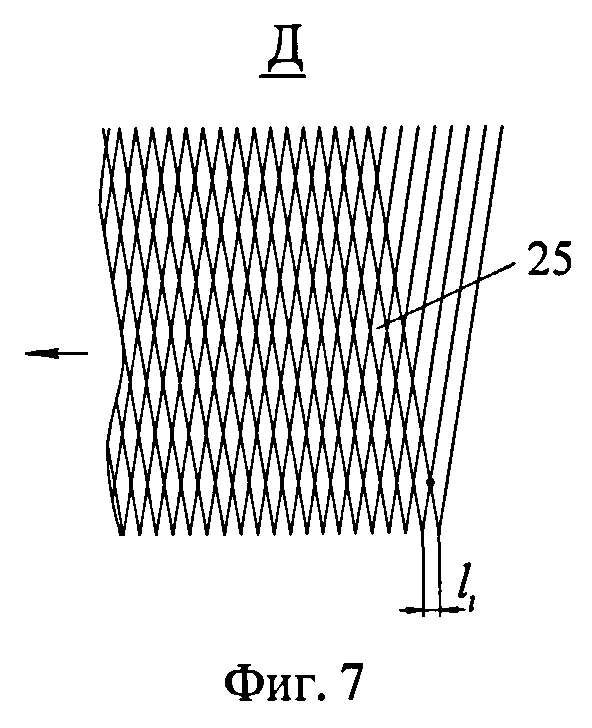
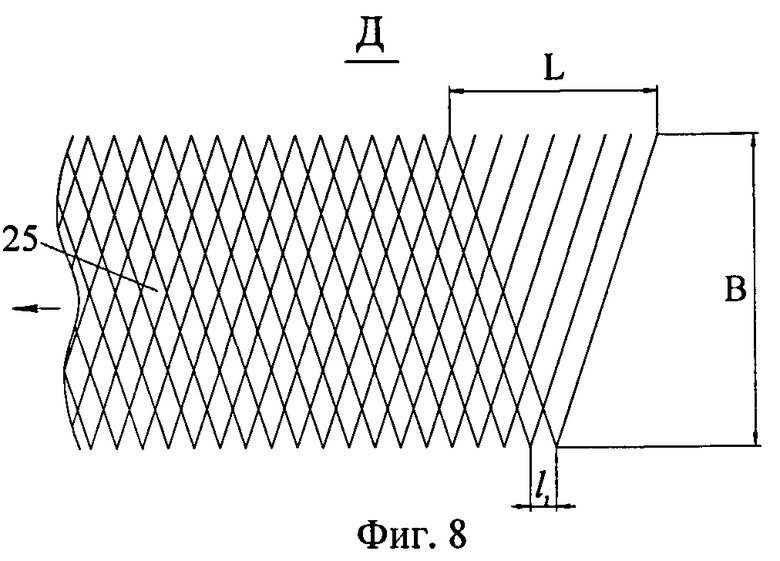
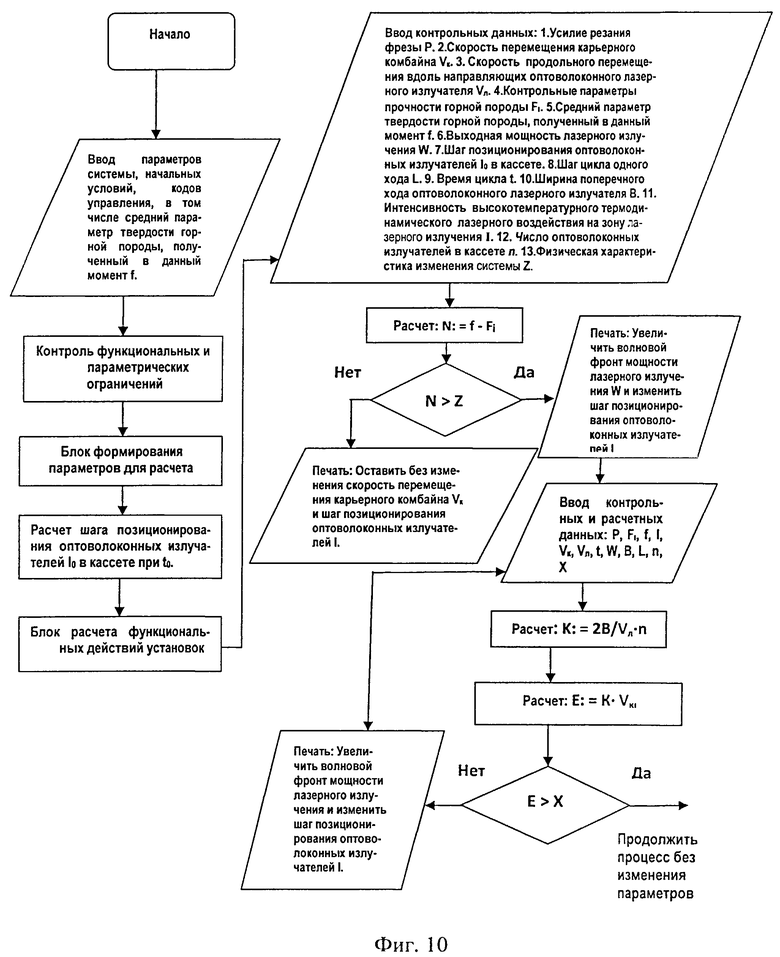
На фиг.1 - общий вид системы управления лазерной обработкой скальной породы переменной крепости с карьерным комбайном; на фиг.2 - вид А на фиг.1; на фиг.3 - разрез Б-Б на фиг.2; на фиг.4 - разрез В-В на фиг.2, крайнее расположение оптоволоконных излучателей в сжатом виде при высоких показателях крепости f горной породы и уменьшении скорости Vki перемещения карьерного комбайна; на фиг.5 - разрез В-В на фиг.2, крайнее раздвинутое положение оптоволоконных излучателей при низких показателях крепости f горной породы и увеличении скорости Vki перемещения карьерного комбайна; на фиг 6 - разрез Г-Г на фиг.5; на фиг.7 показаны многорядные зоны перекрытия лазерных щелей, образуемые при высоких показателях крепости f горной породы; на фиг.8 показаны многорядные зоны перекрытия лазерных щелей, образуемые при низких показателях крепости f горной породы; на фиг.9 - блок-схема управления лазерной обработкой скальной породы переменной крепости с карьерным комбайном; на фиг.10 - блок-схема управления шагом позиционирования оптоволоконных излучателей li.
Система управления 1 лазерной обработкой скальной породы переменной крепости содержит систему генерации и подачи оптического лазерного излучения 2, блок управления интенсивностью лазерного излучения 3, соединенный с системой генерации и подачи оптического лазерного излучения 2, микропроцессор с блоком управления 4, блок регистрации и анализа распределения энергии в зоне обработки 5. Датчик регистрации интенсивности лазерного излучения 6 соединен с блоком регистрации и анализа распределения энергии в зоне обработки 5. Блок регистрации параметра прочности горной породы 7 связан с датчиком регистрации прочности горной породы 8. Блок контроля 9 усилия резания фрезы 10 и скорости перемещения карьерного комбайна 11 связан с микропроцессором с блоком управления 4. Микропроцессор с блоком управления 4 связан с блоком управления 12 скоростью продольного перемещения оптоволоконного лазерного излучателя 13 вдоль направляющих 14 посредством привода 15. Микропроцессор с блоком управления 4 связан с блоком управления 16 скоростью перемещения карьерного комбайна 11 и скоростью вращения фрезы 10, блоком управления 17 приводом перемещения 18 оптоволоконных излучателей 19 и блоком управления 20 приводами поворота 21 рамы 22. Микропроцессор с блоком управления 4 связан с блоком регистрации и анализа распределения энергии в зоне обработки 5, блоком управления системой охлаждения 23 и блоком управления компрессорной системой подачи сжатого воздуха 24 для пылеудаления из зоны лазерной обработки. Функциональность процесса зависит от прочности пород f, которая влияет на скорость перемещения комбайна Vki 11, волновой фронт мощности лазерного излучения W и формирование многорядных зон перекрытия лазерных щелей 25, обеспечивающих высокую концентрацию напряжений, знакопеременные нагрузки и деформацию при обработке значительной поверхности массива. Оптоволоконные излучатели 19 связаны между собой подвижными шарнирными связями 26, которые позволяют изменять расстояние li 27 между оптоволоконными излучателями 19. Оптоволоконные излучатели 19 перемещаются с помощью привода перемещения 18, связанного с подвижными шарнирными связями 26. Согласование действий управления расстоянием li 27 между оптоволоконными излучателями 19 при фиксации параметра прочности горной породы f осуществляется по алгоритму в соответствии с фиг.10.
Способ управления лазерной обработкой скальной породы переменной крепости реализуется следующим образом.
Осуществляется предварительная подготовка горного массива. Блок управления 20 подает сигнал на привод поворота 21 и рама 22 фиксируется на определенном расстоянии от зоны обработки. Оптоволоконный лазерный излучатель 13 устанавливается посредством привода 15 в крайнее положение на направляющих 14. Осуществляют контроль параметров прочности f горной породы посредством датчика 8 регистрации прочности горной породы, установленного на раме оптоволоконного лазерного излучателя 13, контроль скорости перемещения карьерного комбайна Vki 11, скорости вращения фрезы 10 и усилия резания фрезы 10. С помощью датчика регистрации интенсивности лазерного излучения 6 осуществляют контроль интенсивности высокотемпературного термодинамического лазерного воздействия на зону лазерного излучения. Информация от датчика регистрации интенсивности лазерного излучения 6 поступает через блок регистрации и анализа распределения энергии в зоне обработки 5 в микропроцессор с блоком управления 4 системы управления 1. Блок управления 12 скоростью продольного перемещения оптоволоконного лазерного излучателя 13 вдоль направляющих 14 подает команду на привод 15 для перемещения оптоволоконного лазерного излучателя 13 одновременно с карьерным комбайном 11, который получает команду от блока управления 16 скоростью перемещения карьерного комбайна 11. В программу вводится алгоритм вычисления волнового фронта мощности лазерного излучения W=f(f) в зависимости от параметров прочности f горной породы и шага позиционирования оптоволоконных излучателей li на основе уравнения
где B - ширина поперечного хода оптоволоконного лазерного излучателя 13, равная ширине фрезерования поверхности карьерного комбайна 11, м; Vл - скорость продольного перемещения оптоволоконного лазерного излучателя 13 вдоль направляющих 14, м/с; n - число оптоволоконных излучателей 19 в кассете; Vki - скорость перемещения карьерного комбайна 11, в зависимости от параметров прочности f горной породы.
При фиксировании датчиком 8 зон повышенной крепости f, в процессе фрезерования скальных пород, через блок регистрации параметра прочности горной породы 7 и микропроцессор с блоком управления 4 подается команда на блок управления 16 скоростью перемещения карьерного комбайна 11 и скоростью вращения фрезы 10. Блок контроля 9 усилия резания фрезы 10 и скорости перемещения карьерного комбайна Vki 11 фиксирует текущие параметры и направляет их в микропроцессор с блоком управления 4. Повышение крепости горной породы f влечет за собой необходимость изменения расстояния 27 между оптоволоконными излучателями 19. Изменение расстояния 27 происходит с помощью привода перемещения 18 и подвижных шарнирных связей 26, чтобы многорядные зоны перекрытия лазерных щелей 25 образовывались равномерно, без просветов. Регулирование расстояния 27 позволяет осуществить формирование в приповерхностном слое обрабатываемого массива равномерно расположенных многорядных зон перекрытия лазерных щелей 25 при изменении скорости перемещения карьерного комбайна 11. Расширение расстояния li между лазерными щелями 25 в многорядных зонах их перекрытия компенсируется регулированием энерговклада в зону лазерной обработки. Посредством системы генерации и подачи оптического лазерного излучения 2 осуществляется повышение мощности W лазерного излучения. Система генерации и подачи оптического лазерного излучения 2 связана с блоком управления интенсивностью лазерного излучения 3, который получает команду от микропроцессора с блоком управления 4. Микропроцессор с блоком управления 4 связан с блоком управления 16 скоростью перемещения карьерного комбайна 11 и скоростью вращения фрезы 10, а также блоком управления 17 приводом перемещения 18 оптоволоконных излучателей 19, блоком управления системой охлаждения 23 и блоком управления компрессорной системой подачи сжатого воздуха 24 для пылеудаления из зоны лазерной обработки.
Способ управления лазерной обработкой скальной породы переменной крепости повышает эффективность управления технологической подготовкой к выемке скальных пород, обеспечивает возможность дистанционного управления разрушением горных пород, улучшает условия работы, техническую и экологическую безопасность процесса.
Источники информации
1. Патент РФ №2362877 от 01.02.2008. Способ циклично-поточной отработки скальных горных пород.
2. Патент РФ №2456538 25.02.2011. Способ взрывного рыхления скальных пород зарядами с воздушной подушкой.
3. Патент РФ №2009322 от 15.03.1994. Способ отработки уступов горных пород.
4. Патент РФ №2079657 от 20.05.1997. Способ отработки уступов горных пород.
5. Патент РФ №2449106 от 13.10.2010. Способ бурения скважин с использованием лазерной энергии и устройство для его реализации.
6. Патент РФ №2422624 от 28.04.2010. Перфоратор лазерный гидравлический щелевой.
7. Патент РФ №2468141 от 27.11.2012. Адаптивное регулирование привода фрезерной машины.
8. Патент РФ №1658514 от 20.01.2006. Способ лазерной обработки и устройство для его осуществления.
Изобретение относится к горной промышленности и может быть использовано для управления процессом лазерного воздействия на скальные породы переменной крепости при подготовке горных пород к безвзрывному разупрочнению для последующего послойно-полосового фрезерования и выемки карьерными комбайнами. Способ управления включает контроль интенсивности высокотемпературного термодинамического лазерного воздействия на зону лазерного излучения, регулирование изменения волнового фронта лазерного излучения, контроль усилия резания фрезы P, параметров прочности f горной породы посредством датчика регистрации прочности горной породы, установленного на раме оптоволоконного лазерного излучателя, контроль скорости перемещения карьерного комбайна Vki, введение в программу алгоритма вычисления волнового фронта мощности лазерного излучения W в зависимости от параметров прочности f горной породы и шага позиционирования оптоволоконных излучателей li на основе уравнения. Изобретение позволяет повысить эффективность управления технологической подготовки к выемке скальных пород и обеспечивает возможность дистанционного управления разрушением горных пород. 2 н.п. ф-лы, 10 ил.
1. Способ управления лазерной обработкой скальной породы переменной крепости, включающий контроль интенсивности высокотемпературного термодинамического лазерного воздействия на зону лазерного излучения, регулирование изменения волнового фронта лазерного излучения, отличающийся тем, что осуществляют контроль усилия резания фрезы Р, параметров прочности f горной породы посредством датчика регистрации прочности горной породы, установленного на раме оптоволоконного лазерного излучателя, контроль скорости перемещения карьерного комбайна Vki, введение в программу алгоритма вычисления волнового фронта мощности лазерного излучения W в зависимости от параметров прочности f горной породы и шага позиционирования оптоволоконных излучателей li на основе уравнения
где B - ширина поперечного хода оптоволоконного лазерного излучателя, равная ширине фрезерования поверхности карьерного комбайна, м;
Vл - скорость продольного перемещения оптоволоконного лазерного излучателя вдоль направляющих, м/с;
n - число оптоволоконных излучателей в кассете;
Vki - скорость перемещения карьерного комбайна,
в зависимости от параметров прочности f горной породы и при изменении скорости перемещения карьерного комбайна Vki, в случае возникновения зон повышенной или пониженной крепости f при послойно-полосовом фрезеровании скальных пород, осуществляют регулирование энерговклада волнового фронта лазерного излучения в зону обработки посредством блока управления интенсивностью лазерного излучения и формирование в приповерхностном слое обрабатываемого массива равномерно расположенных многорядных зон перекрытия лазерных щелей без возможных просветов посредством привода перемещения оптоволоконных излучателей.
2. Система управления лазерной обработкой скальной породы переменной крепости, включающая систему генерации и подачи оптического лазерного излучения, блок управления интенсивностью лазерного излучения, соединенный с системой генерации и подачи оптического лазерного излучения, микропроцессор с блоком управления, блок регистрации и анализа распределения энергии в зоне обработки, отличающаяся тем, что снабжена датчиком регистрации интенсивности лазерного излучения, который соединен с блоком регистрации и анализа распределения энергии в зоне обработки, а также снабжена блоком регистрации параметра прочности горной породы, связанным с датчиком регистрации прочности горной породы, снабжена блоком контроля усилия резания фрезы и скорости перемещения карьерного комбайна, связанного с микропроцессором с блоком управления, который связан с блоком управления скоростью продольного перемещения оптоволоконного лазерного излучателя вдоль направляющих, блоком управления скоростью перемещения карьерного комбайна и скоростью вращения фрезы, блоком управления приводом перемещения оптоволоконных излучателей и блоком управления приводом поворота рамы, при этом микропроцессор с блоком управления связан с блоком регистрации и анализа распределения энергии в зоне обработки, блоком управления системой охлаждения и блоком управления компрессорной системой подачи сжатого воздуха для пылеудаления из зоны лазерной обработки.
| Способ лазерной обработки и устройство для его осуществления | 1988 |
|
SU1658514A1 |
| Датчик положения кромки режущего инструмента | 1988 |
|
SU1606852A1 |
| УСТРОЙСТВО ДЛЯ БУРЕНИЯ ТВЕРДЫХ ГОРНЫХ ПОРОД | 2009 |
|
RU2416708C2 |
| СПОСОБ БУРЕНИЯ СКВАЖИН С ИСПОЛЬЗОВАНИЕМ ЛАЗЕРНОЙ ЭНЕРГИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2449106C1 |
| Машина для уборки зерновых культур | 1948 |
|
SU76272A1 |
| US 5735355 A1, 07.04.1998 | |||
| US 20120248078 A1, 04.10.2012 | |||
| . | |||

