Изобретение относится к горной промышленности и может быть использовано при разработке крутопадающих месторождений твердых полезных ископаемых, в частности скального и полускального типов.
Известна конструкция бульдозерного экскаватора многократного применения, содержащая телескопическую стрелу, на торце которой размещен дополнительный поворотный круг с различным навесным оборудованием [1].
Конструктивные особенности бульдозерного экскаватора многократного применения не позволяют вести глубокую разработку твердых полезных ископаемых открыто-подземным способом.
Известно фрезерное устройство и способ разработки фунта, которое содержит фрезерное устройство, содержащее раму, две дисковые фрезы, установленные с возможностью приводного вращения вокруг параллельных осей. Способ используется при разработке щелей для возведения изоляционных стен [2].
Данное устройство и способ используются для разработки пород в строго вертикальном направлении.
Известен комплекс глубокой разработки пластов, представляющий собой комбайн с горизонтальным цилиндрическим барабаном с режущими зубьями управляемым узлом толкателя. Дистанционно управляемый модуль режущей головки внедряется в пласт с помощью упорных усилий конвейера, последовательно наращиваемого по мере углубления и образующего единый став между поверхностным и выемочным модулями [3].
Необходимость оставления межзабойных целиков для поддержания кровли при разработке горизонтально и пологозалегающих пластов снижает коэффициент извлечения полезного ископаемого из недр. Данное устройство позволяет отрабатывать лишь горизонтальные и пологонаклонные пласты полезного ископаемого. При наращивании секций конвейера, а также их демонтаже, при перестановке комбайна к новому забою увеличиваются простои комплекса, снижается производительность.
Наиболее близким по технической сущности является рабочее оборудование гидравлического экскаватора, включающее платформу и связанную с ней посредством механизма поворота консольную телескопическую стрелу, содержащую основную секцию и шарнирно соединенную с ней, через промежуточную секцию, головную секцию, установленные с возможностью поворота в вертикальной плоскости, механизмы поворота головной секции и промежуточной секции, механизм вращения рабочего органа с режущими инструментами. Рабочее оборудование экскаватора позволяет нарезать щели в промерзших откосах уступов для их разупрочнения [4].
Конструкция оборудования экскаватора не обеспечивает возможности добычи твердых полезных ископаемых открыто-подземным способом.
Технический результат заключается в повышении производительности, надежности и расширении технологической эффективности разрушения пород различной степени крепости и связности посредством регулирования усилия резания в зоне обработки и формирования в поверхностном слое обрабатываемого массива зон разрушения с учетом прочностных характеристик породы, уменьшении объема вскрышных работ, снижении экологической нагрузки на окружающую среду в районе ведения горных работ.
Технический результат достигается тем, что в способе разработки крутопадающих месторождений твердых полезных ископаемых, включающем позиционирование автоматизированного комплекса глубокой разработки относительно забоя, приведение его в рабочее исходное состояние посредством механизма поворота в вертикальной плоскости консольной телескопической стрелы с основной, промежуточной и головной секциями, позиционирование автоматизированного комплекса глубокой разработки относительно забоя осуществляют с учетом направления залегания рудного тела, при этом контроль параметров горной породы осуществляют посредством датчиков контроля физико-механических характеристик горных пород для настраивания усилия резания горной породы с учетом скорости вращения рабочего органа и скорости перемещения рабочего органа в вертикальной плоскости по глубине резания и направлению резания с помощью гидромеханизмов телескопического выдвижения и механизма поворота головной секции, а ширина захвата плоскости рудного тела по горизонтали обеспечивается посредством механизма позиционирования комплекса относительно направляющих, причем информация о контурах разрушенной горной массы поступает от датчиков контроля контуров горной массы на системный блок управления.
Автоматизированный комплекс глубокой разработки, включающий платформу и связанную с ней посредством механизма поворота консольную телескопическую стрелу, содержащую основную секцию и шарнирно соединенную с ней, через промежуточную секцию, головную секцию, установленные с возможностью поворота в вертикальной плоскости, механизмы поворота головной секции и промежуточной секции, механизм вращения рабочего органа с режущими инструментами снабжен механизмом позиционирования комплекса относительно забоя с выносными опорами и направляющими, гидромеханизмом телескопического выдвижения головной секции, вакуумной системой пневмотранспортирования, включающей телескопически подвижное в вертикальной плоскости сопло, установленное с возможностью поворота в вертикальной плоскости, снабженное датчиками контроля контуров горной массы и связанное с промежуточной секцией, причем гибкий шланг и телескопический пневмопровод установлены на основной секции, при этом воздушный насос и стационарные трубопроводы установлены на платформе, а разгружатель, затвор, разгрузочный желоб с механизмом поворота и фильтр установлены на основной секции, при этом датчики контроля физико-механических характеристик горных пород установлены на головной секции и связаны с системным блоком управления автоматизированным комплексом глубокой разработки, при этом рабочий орган с режущими инструментами выполнен составным со встроенным механизмом вращения.
Возможность формирования требуемой последовательности выполняемых действий предложенными средствами позволяет решить поставленную задачу, определяет новизну, промышленную применимость и изобретательский уровень разработки.
Автоматизированный комплекс глубокой разработки изображен на чертежах.
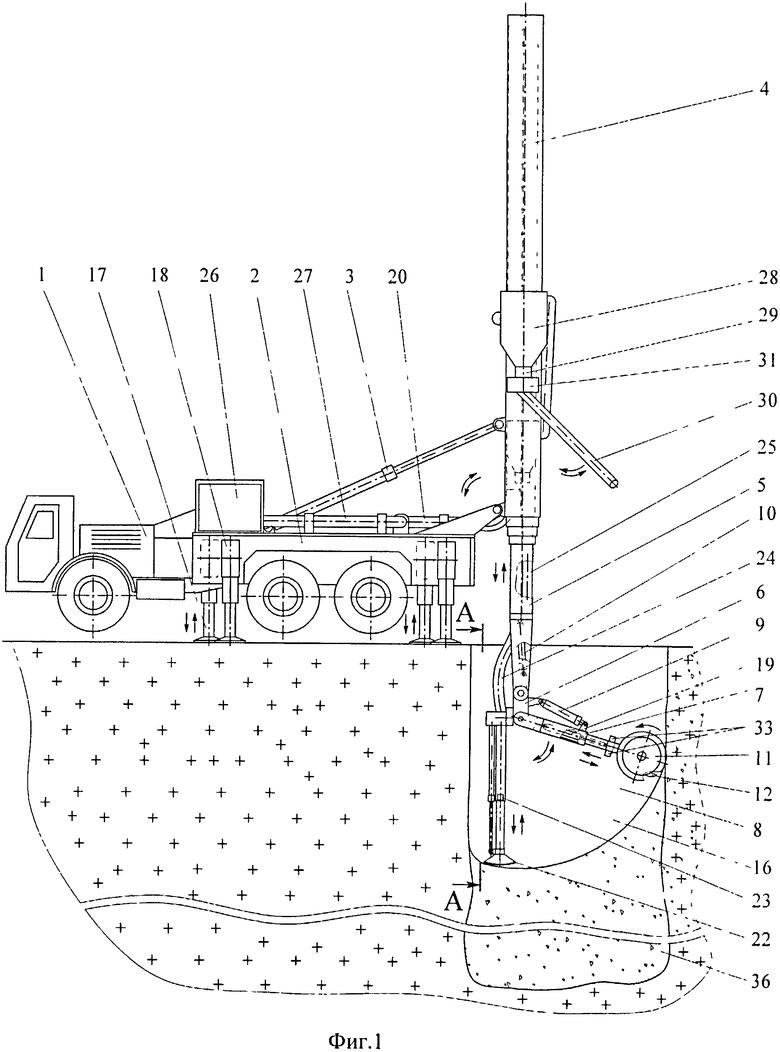
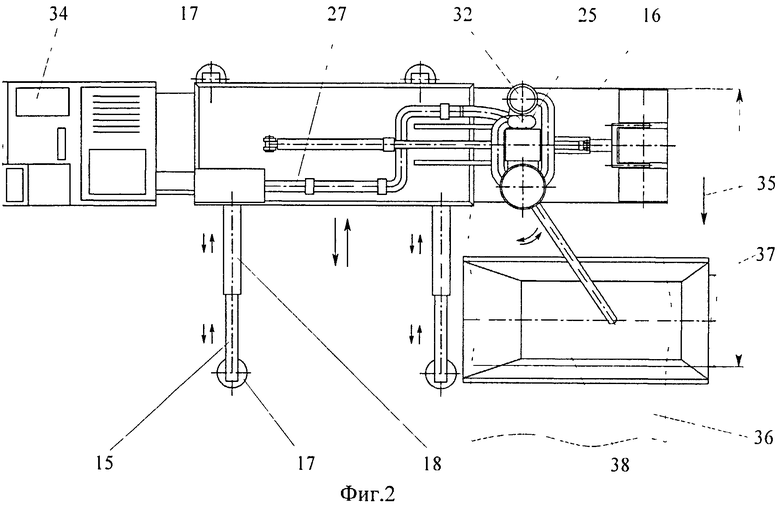
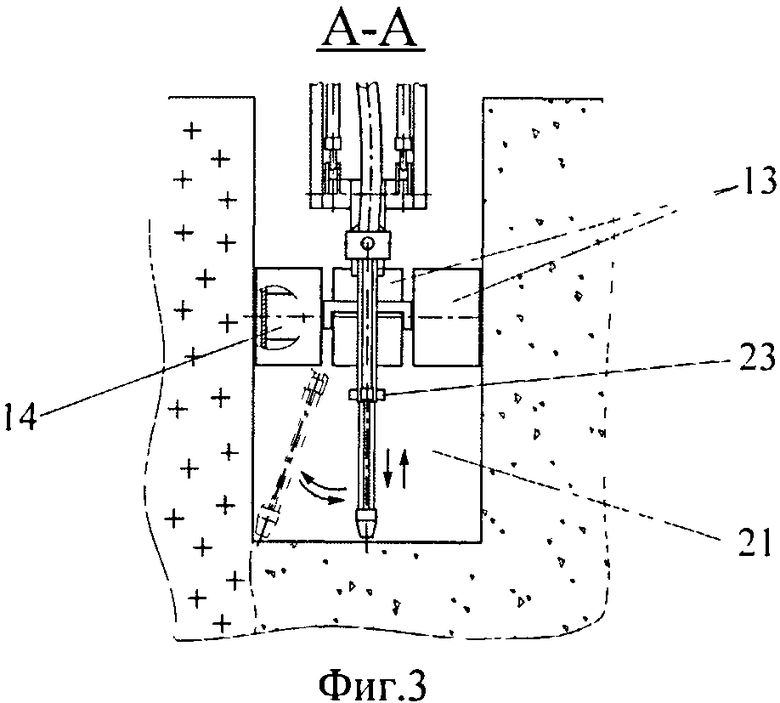
На фиг.1 - общий вид автоматизированного комплекса глубокой разработки в рабочем положении, головная секция в крайнем верхнем положении; на фиг.2 - вид сверху на фиг.1; на фиг.3 - разрез А-А на фиг.1.
Автоматизированный комплекс глубокой разработки 1, включающий платформу 2 и связанную с ней посредством механизма поворота 3 консольную телескопическую стрелу 4, содержащую основную секцию 5 и шарнирно соединенную с ней, через промежуточную секцию 6, головную секцию 7. Механизмы поворота 9 и 10, соответственно головной секции 7 и промежуточной секции 6, установлены с возможностью поворота в вертикальной плоскости 8. Рабочий орган 11 с режущими инструментами 12 выполнен составным 13 со встроенным механизмом вращения 14. Механизм позиционирования комплекса 15 относительно забоя 16 включает выносные опоры 17 и направляющие 18. Головная секция 7 оснащена гидромеханизмом телескопического выдвижения 19. Вакуумная система пневмотранспортирования 20 включает телескопически подвижное в вертикальной плоскости 21 сопло 22, установленное с возможностью поворота в вертикальной плоскости 21. Сопло 22 снабжено датчиками контроля контуров горной массы 23 и связанно с промежуточной секцией 6. Гибкий шланг 24 и телескопический пневмопровод 25 установлены на основной секции 5. Воздушный насос 26 и стационарные трубопроводы 27 вакуумной системы пневмотранспортирования 20 установлены на платформе 2. Разгружатель 28, затвор 29, разгрузочный желоб 30 с механизмом поворота 31 и фильтр 32 установлены на основной секции 5. Датчики контроля физико-механических характеристик горных пород 33 установлены на головной секции 7 и связаны с системным блоком управления 34 автоматизированным комплексом глубокой разработки 1.
Позиционирование автоматизированного комплекса глубокой разработки 1 относительно забоя 16 осуществляют с учетом направления залегания 35 рудного тела 36. Ширина захвата 37 плоскости рудного тела 36 по горизонтали обеспечивается посредством механизма позиционирования комплекса 15 относительно направляющих 18. Автосамосвал 38 устанавливается под разгрузочный желоб 30.
Способ разработки крутопадающих месторождений твердых полезных ископаемых осуществляется следующим образом.
Позиционирование автоматизированного комплекса глубокой разработки 1 относительно забоя 16 осуществляют с учетом направления залегания 35 рудного тела 36. Приведение автоматизированного комплекса глубокой разработки 1 в рабочее исходное состояние осуществляется посредством выдвижения направляющих 18 и выносных опор 17. Посредством механизма поворота 3 производится подъем в вертикальной плоскости консольной телескопической стрелы 4 с основной 5, промежуточной 6 и головной 7 секциями. Производится контроль параметров горной породы посредством датчиков контроля физико-механических характеристик горных пород 33 для настраивания усилия резания горной породы с учетом скорости вращения рабочего органа 11 и скорости перемещения рабочего органа в вертикальной плоскости 8 по глубине резания и направлению резания с помощью гидромеханизма телескопического выдвижения 19 и механизма поворота 9 головной секции 7. За счет встроенного механизма вращения 14 приводится в движение составной 13 рабочий орган 11 с режущими инструментами 12. Основная секция 5 выдвигается и приводит рабочий орган 11 к контакту с горной породой, начинается отработка забоя 16. В процессе разрушения горная масса смещается в нижнюю часть забоя 16, где располагается телескопически подвижное в вертикальной плоскости 21 сопло 22, установленное с возможностью поворота в вертикальной плоскости 21. Информация о контурах разрушенной горной массы поступает от датчиков контроля контуров горной массы 23 на системный блок управления 34, который задает рациональную траекторию перемещения сопла 22 для удаления горной массы из забоя 16. Воздушный насос 26 и стационарные трубопроводы 27 установлены на платформе 2. При включении воздушного насоса 26 осуществляется всасывание частиц горной массы через сопло 22, гибкий шланг 24 и телескопический трубопровод 25, при этом частицы горной массы подаются к разгружателю 28. В нижней части разгружателя 28 имеется затвор 29, при открывании которого горная масса по разгрузочному желобу 30 поступает в кузов автосамосвала 38. Для равномерной загрузки кузова автосамосвала 38 разгрузочный желоб 30 оборудован механизмом поворота 31. Вакуумная система пневмотранспортирования 20 оснащена фильтром 32. После отработки элемента рудного тела 36 на определенную глубину рабочий орган 11 поднимается на дневную поверхность и автоматизированный комплекс глубокой разработки перемещается в направлении залегания 35 рудного тела 36. Ширина захвата 37 плоскости рудного тела 36 по горизонтали обеспечивается посредством механизма позиционирования комплекса 15 относительно направляющих 18. Рабочий орган 11, промежуточная секция 6, головная секция 7 и сопло 22 устанавливаются в транспортное положение с помощью механизма поворота 10.
Способ повышает производительность, надежность и расширяет технологическую эффективность разрушения пород различной степени крепости и связности посредством регулирования усилия резания в зоне обработки и формирования в поверхностном слое обрабатываемого массива зон разрушения с учетом прочностных характеристик породы. Способ обеспечивает уменьшение объема вскрышных работ и снижение экологической нагрузки на окружающую среду в районе ведения горных работ.
Источники информации
1. Патент РФ №2485250 от 20.06.2013. Бульдозерный экскаватор многократного применения.
2. Патент РФ №2310725 от 20.11.2007. Фрезерное устройство и способ разработки грунта.
3. Задавин Г.Д., Лейдерман Л.П. Освоение Элегестского каменноугольного месторождения - основа создания новой сырьевой базы коксующихся углей // Рациональное освоение недр. - 2012. - №2. - С.38-44.
4. Патент РФ №2380487 от 27.01.2010. Рабочее оборудование гидравлического экскаватора.
Изобретение относится к горной промышленности и может быть использовано при разработке крутопадающих месторождений твердых полезных ископаемых, в частности скального и полускального типов. Техническим результатом является повышение производительности, надежности и расширение технологической эффективности разрушения пород различной степени крепости и связности посредством регулирования усилия резания в зоне обработки и формирования в поверхностном слое обрабатываемого массива зон разрушения с учетом прочностных характеристик породы. Способ включает позиционирование автоматизированного комплекса глубокой разработки относительно забоя с учетом направления залегания рудного тела. Контроль параметров горной породы осуществляют посредством датчиков контроля физико-механических характеристик горных пород для настраивания усилия резания горной породы с учетом скорости вращения рабочего органа и скорости перемещения рабочего органа в вертикальной плоскости по глубине резания и направлению резания с помощью гидромеханизмов телескопического выдвижения и механизма поворота головной секции. Ширина захвата плоскости рудного тела по горизонтали обеспечивается посредством механизма позиционирования комплекса относительно направляющих, причем информация о контурах разрушенной горной массы поступает от датчиков контроля контуров горной массы на системный блок управления. 2 н.п. ф-лы, 3 ил.
1. Способ разработки крутопадающих месторождений твердых полезных ископаемых, включающий позиционирование автоматизированного комплекса глубокой разработки относительно забоя, приведение его в рабочее исходное состояние посредством механизма поворота в вертикальной плоскости консольной телескопической стрелы с основной, промежуточной и головной секциями, отличающийся тем, что позиционирование автоматизированного комплекса глубокой разработки относительно забоя осуществляют с учетом направления залегания рудного тела, при этом контроль параметров горной породы осуществляют посредством датчиков контроля физико-механических характеристик горных пород для настраивания усилия резания горной породы с учетом скорости вращения рабочего органа и скорости перемещения рабочего органа в вертикальной плоскости по глубине резания и направлению резания с помощью гидромеханизмов телескопического выдвижения и механизма поворота головной секции, а ширина захвата плоскости рудного тела по горизонтали обеспечивается посредством механизма позиционирования комплекса относительно направляющих, причем информация о контурах разрушенной горной массы поступает от датчиков контроля контуров горной массы на системный блок управления.
2. Автоматизированный комплекс глубокой разработки, включающий платформу и связанную с ней посредством механизма поворота консольную телескопическую стрелу, содержащую основную секцию и шарнирно соединенную с ней, через промежуточную секцию, головную секцию, установленные с возможностью поворота в вертикальной плоскости, механизмы поворота головной секции и промежуточной секции, механизм вращения рабочего органа с режущими инструментами, отличающийся тем, что снабжен механизмом позиционирования комплекса относительно забоя с выносными опорами и направляющими, гидромеханизмом телескопического выдвижения головной секции, вакуумной системой пневмотранспортирования, включающей телескопически подвижное в вертикальной плоскости сопло, установленное с возможностью поворота в вертикальной плоскости, снабженное датчиками контроля контуров горной массы и связанное с промежуточной секцией, причем гибкий шланг и телескопический пневмопровод установлены на основной секции, при этом воздушный насос и стационарные трубопроводы установлены на платформе, а разгружатель, затвор, разгрузочный желоб с механизмом поворота и фильтр установлены на основной секции, при этом датчики контроля физико-механических характеристик горных пород установлены на головной секции и связаны с системным блоком управления автоматизированным комплексом глубокой разработки, при этом рабочий орган с режущими инструментами выполнен составным со встроенным механизмом вращения.
| РАБОЧЕЕ ОБОРУДОВАНИЕ ГИДРАВЛИЧЕСКОГО ЭКСКАВАТОРА | 2008 |
|
RU2380487C1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ СКОРОСТИ ПОДАЧИ СТРЕЛОВИДНОГО ИСПОЛНИТЕЛЬНОГО ОРГАНА ПРОХОДЧЕСКОГО КОМБАЙНА | 2011 |
|
RU2464420C1 |
| Транспортер для дров, досок и т.п. материалов | 1929 |
|
SU20542A1 |
| US 4014574 A1, 29.03.1977 | |||

