Область техники
Настоящее изобретение относится к системе для управления одной или более точками переключения передач. В частности, изобретение относится к системе в соответствии с ограничительной частью п.1 формулы изобретения. Изобретение также относится к системе, транспортному средству, компьютерной программе и компьютерному программному продукту.
Уровень техники
На фиг.1 схематично показаны детали трансмиссии транспортного средства 1, такого как легковой автомобиль или тяжелое транспортное средство, например грузовик или автобус. Трансмиссия содержит двигатель 10, механически соединенный посредством вала с первым концом коробки 20 передач через устройство 40 сцепления. На другом своем конце коробка 20 передач также механически соединена, посредством карданного вала 50, с дифференциальной передачей 30, связанной с задним мостом. Задний мост содержит соответственные левый и правый приводные валы 60, которые приводят в движение приводные колеса транспортного средства (не показанные на чертеже).
При данной хорошо известной конструкции механическая работа двигателя 10 передается через различные устройства трансмиссии (например, устройство 40 сцепления, коробку 20 передач, карданный вал 50, дифференциальную передачу 30 и приводные валы 60) на приводные колеса, чтобы приводить в движение транспортное средство 1. Важным устройством в трансмиссии является коробка 20 передач, которая содержит некоторое количество шестерен переднего хода для перемещения транспортного средства 1 вперед и обычно также одну или более шестерен заднего хода. Количество шестерен переднего хода может быть разным, однако в современных грузовиках обычно предусмотрено двенадцать шестерен переднего хода.
Коробка 20 передач может быть механической или автоматической, а также может представлять собой автоматическую коробку передач с возможностью ручного переключения передач (АМТ). Автоматические коробки передач и автоматические коробки передач с возможностью ручного переключения передач представляют собой автоматизированные системы коробок передач, обычно управляемые блоком 110 управления, иногда также называемым электронным блоком управления (ЭБУ), который приспособлен для управления коробкой передач 20, например, во время переключения передач, когда выбор передач осуществляется при некоторой скорости транспортного средства при некотором сопротивлении движению. ЭБУ может измерять скорость двигателя и состояние коробки 20 передач и управлять коробкой передач посредством электромагнитных клапанов, соединенных с пневматическими устройствами. Информация о двигателе 10, например его скорость и крутящий момент, также передается из двигателя 10 в ЭБУ, например через шину CAN.
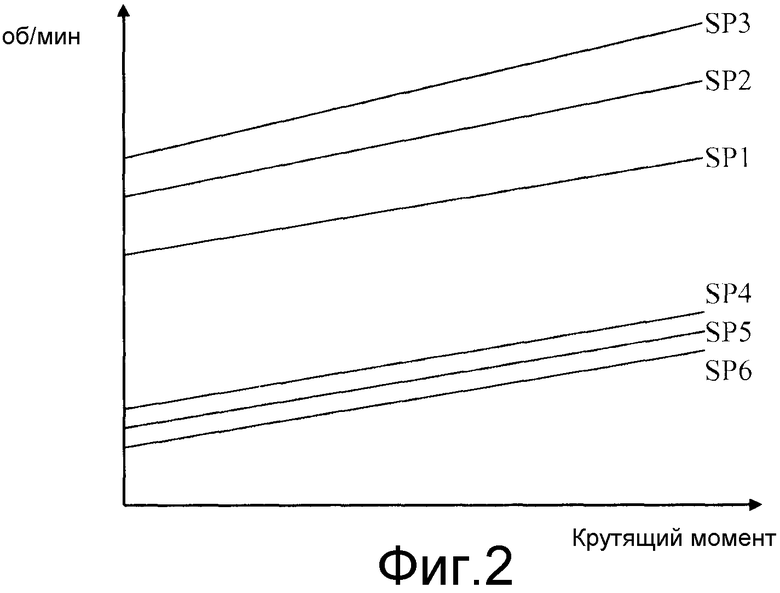
В обычных системах переключения передач, блок 110 управления использует табулированные пределы скорости двигателя, называемые также точками переключения, которые изображают скорость двигателя, при которой должно осуществляться понижение или повышение передачи в коробке 20 передач, т.е. транспортное средство 1 переключает передачу, когда скорость его двигателя 10 превышает скорость, изображаемую точкой переключения. Таким образом, точки переключения могут рассматриваться как обеспечивающие информацию не только о том, когда должно осуществляться понижение или повышение передачи, но и о количестве ступеней передачи, которые должны быть осуществлены при каждом понижении или повышении передачи. Предпочтительно, для каждой точки переключения предусмотрено от одной до трех ступеней передачи, однако возможно и большее количество ступеней.
На фиг.2 схематично показан пример различных табулированных точек переключения, изображенных линиями SP1-SP6 на графике, где ось х изображает крутящий момент двигателя, а ось y - скорость двигателя 10 в оборотах в минуту (об/мин). До тех пор пока скорость двигателя находится в пределах между линиями переключения SP1 и SP4, никакого переключения передач не происходит, однако если она поднимается выше линии повышения передачи, SP1-SP3, инициируется повышение передачи, и по аналогии, если скорость двигателя опускается ниже линии понижения передачи, SP4-SP6, инициируется понижение передачи. В приведенной ниже таблице 1 показано количество ступеней повышения или понижения передачи для каждой из линий SP1-SP6. Например, если скорость двигателя поднимается выше линии SP1, происходит повышение передачи на одну ступень, а если скорость двигателя опускается ниже линии SP5, происходит понижение передачи на две ступени.
Выбор точки переключения передачи влияет, помимо прочего, на ходовые качества, ускорение, комфорт и расход топлива транспортного средства 1, поэтому точки переключения передач должны быть с высокой точностью откалиброваны изготовителями транспортных средств. Данная калибровка предусматривает различные стратегии переключения передач, подвергаемые испытаниям в условиях эксплуатации в различных ситуациях вождения, например, при различных величинах приложенного ускорения, различных уклонах дороги и различных весах транспортного средства с прицепом. Затем результаты испытаний подвергаются тщательному анализу для определения надлежащих точек переключения.
Для того чтобы водитель мог влиять на точки переключения, обычно положение педали 2 акселератора регулирует скорости двигателя для переключения передачи. Однако такое решение в соответствии с известным уровнем техники приводит к тому, что переключения передач осуществляются чаще, чем желательно, если положение педали 2 акселератора непрерывно изменяется, потому что скорости двигателя для переключения передачи повышаются и понижаются при изменениях в положении педали 2 акселератора. При этом может возникать ощущение, что транспортное средство 1 «дергается» вследствие частых переключений передачи, что может также влиять на расход топлива и комфорт вождения. На фиг.3 показан пример педали 2 акселератора в транспортном средстве 1, в котором педаль выполнена с возможностью поворота вокруг оси для управления приложенным ускорением/крутящим моментом двигателя, как показано точечными стрелками на чертеже.
Краткое описание изобретения
Задачей изобретения является создание альтернативной системы управления одной или более точками переключения передач. Другой задачей изобретения является создание системы управления одной или более точками переключения передач, которая полностью или частично решает проблемы известного уровня техники.
В соответствии с одним аспектом изобретения, упомянутые задачи решаются посредством создания системы для управления одной или более точками переключения, которая содержит, по меньшей мере, один блок управления, приспособленный для управления коробкой передач транспортного средства, содержащего двигатель, соединенный с возможностью приведения с коробкой передач, при этом скорость двигателя регулируется посредством педали акселератора, которая соединена с двигателем и коробкой передач и может занимать множество положений, причем точка переключения регулируется посредством педали акселератора и представляет скорость двигателя, при которой упомянутая коробка передач приспособлена для осуществления понижения или повышения передачи, причем упомянутая система приспособлена для работы в первом режиме, в котором упомянутая одна или более точек переключения регулируются на основе перемещений упомянутой педали акселератора, и дополнительно приспособлена для наложения ограничения на изменение в упомянутой одной или более точках переключения за единицу времени.
Варианты осуществления упомянутой системы указаны в зависимых пунктах формулы изобретения, относящихся к ней. Изобретение также относится к транспортному средству, содержащему, по меньшей мере, одну такую систему.
В соответствии с другим аспектом изобретения, упомянутые задачи решаются посредством создания способа управления одной или более точками переключения для коробки передач транспортного средства, содержащего двигатель, соединенный с возможностью приведения с коробкой передач, при этом управление скоростью двигателя осуществляется посредством педали акселератора, которая соединена с двигателем и коробкой передач и может принимать множество положений, при этом одна или более точек переключения регулируются посредством упомянутой педали акселератора, причем каждая представляет скорость двигателя, при которой коробка передач приспособлена для осуществления понижения или повышения передачи, и регулируются на основе перемещений упомянутой педали акселератора в первом режиме, тем самым накладывая ограничение на изменение в упомянутой одной или более точках переключения за единицу времени.
Изобретение относится также к компьютерной программе, содержащей программный код, которая, когда программный код выполняется в компьютере, вынуждает компьютер осуществлять упомянутый способ. Изобретение относится также к компьютерному программному продукту с упомянутой компьютерной программой.
Способ в соответствии с изобретением может быть также модифицирован в соответствии с различными вариантами осуществления упомянутой системы.
Преимущество изобретения состоит в том, что устраняются частые переключения передач, что обеспечивает более плавный ход и соответственно также больший комфорт вождения, когда транспортное средство находится в движении. Дополнительные преимущества и применения устройства и системы в соответствии с изобретением указаны в приведенном ниже подробном описании.
Краткое описание чертежей
В приведенном ниже подробном описании настоящего изобретения, варианты осуществления изобретения описаны со ссылкой на прилагаемые чертежи, на которых:
Фиг.1 - схематичный вид части трансмиссии транспортного средства;
Фиг.2 - график линий понижения и повышения передач;
Фиг.3 - схематичный вид педали акселератора;
Фиг.4 - диаграмма состояния в соответствии с вариантом осуществления изобретения;
Фиг.5 - линии понижения и повышения передач, связанные с линией целевой скорости двигателя; и
Фиг.6 - блок управления, образующий часть системы в соответствии с изобретением.
Подробное описание изобретения
В соответствии с известным уровнем техники, точки переключения регулируются посредством положения педали 2 акселератора, что приводит к некоторым вышеописанным недостаткам.
Для того чтобы полностью или частично устранить данные недостатки, изобретение относится к системе, содержащей по меньшей мере один блок 110 управления для управления одной или более точками переключения на основе перемещений педали 2 акселератора. Поскольку педаль 2 акселератора может принимать множество непрерывных положений между первым крайним положением (соответствующим отсутствию приложенного ускорения) и вторым крайним положением (соответствующим полному приложенному ускорению), управление точками переключения осуществляется посредством перемещений педали 2 акселератора между крайними положениями. Например, один или более датчиков или подобных устройств могут регистрировать перемещения педали 2 акселератора и передавать данную информацию в процессор для использования в управлении коробкой 20 передач.
Система также приспособлена для работы в первом режиме М1, в котором управление точками переключения осуществляется на основе перемещений педали 2 акселератора, но изменения в точках переключения подвержены ограничению по тому, как далеко они могут быть смещены. Ограничение относится к тому, насколько точки переключения могут быть смещены в зависимости от скорости двигателя за единицу времени. Преимущество такого решения, помимо прочего, состоит в том, что оно решает вышеупомянутую проблему слишком частых переключений передач и, таким образом, обеспечивает более плавный ход и соответственно больший комфорт вождения, когда транспортное средство 1 находится в движении.
В соответствии с одним вариантом осуществления, ограничение на изменение в точках переключения определяется как величина изменения скорости двигателя для точки переключения за секунду, и предпочтительно, составляет порядка 1-500 об/мин/с. Величина ограничения может представлять собой статический параметр, например он может быть заранее определен изготовителем транспортного средства, но в соответствии с одним вариантом осуществления, она представляет собой динамический параметр, который может быть изменен, например, посредством устройства управления, например, с целью механического управления или электронного устройства управления. При динамическом параметре ограничение на изменение в точках переключения может регулироваться в соответствии с индивидуальными предпочтениями.
Управление точками переключения может быть осуществлено на основе производной Δ для положения педали 2 акселератора, то есть в данном случае производной по времени изменения в положении педали 2 акселератора. Например, производная Δ может быть вычислена как разность в положении педали 2 акселератора за единицу времени. В случае педали 2 акселератора, у которой первое крайнее положение соответствует 0%, а второе крайнее положение соответствует 100%, производная Δ может быть определена в процентах в секунду.
В соответствии с другим вариантом осуществления изобретения, ограничение на изменение в точках переключения осуществляется посредством фильтра нижних частот и/или многоступенчатого ограничителя. Разница между ними состоит в том, что фильтр нижних частот всегда подвержен некоторому запаздыванию по времени даже при медленных перемещениях педали акселератора, тогда как многоступенчатый ограничитель не влияет на точки переключения в отношении времени (задержки по времени), если они перемещаются в допустимых пределах. Данное ограничение, предпочтительно, реализовано в блоке 110 управления.
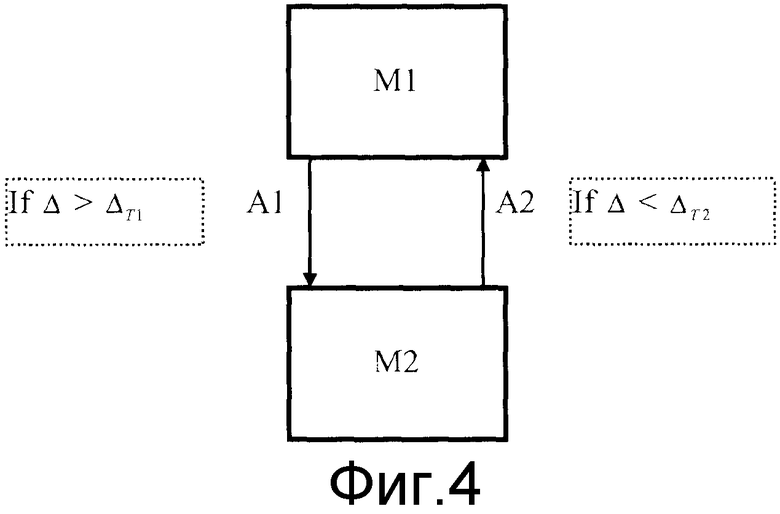
В соответствии с другим вариантом осуществления изобретения, система также приспособлена для работы во втором режиме М2. Когда система работает в данном втором режиме М2, упомянутое ограничение на изменение в точках переключения не накладывается. Данный второй режим М2, предпочтительно, инициируется, когда производная Δ для положения педали 2 акселератора принимает большее значение по сравнению с первым пороговым значением ΔТ1, что приводит к тому, что точки переключения отслеживают перемещения педали 2 акселератора без ограничения, которое накладывается на изменения в точках переключения, когда система работает в упомянутом первом режиме М1.
Преимущество данного варианта осуществления состоит в том, что водитель получает быстрый ответ на быстрое нажатие педали 2 акселератора, в том, что точки переключения в упомянутом втором режиме М2 отслеживают перемещения педали 2 акселератора без ограничения, например, для того чтобы осуществить быстрое понижение передачи. Для возвращения системы из упомянутого второго режима М2 в упомянутый первый режим М1, производная Δ для положения педали 2 акселератора может быть подвергнута сравнению со второй пороговой величиной ΔТ2. Если абсолютная величина производной Δ для положения педали 2 акселератора принимает меньшую величину по сравнению со второй пороговой величиной ΔТ2, система возвращается к работе в первом режиме М1. В варианте упомянутого осуществления, первая пороговая величина ΔТ1 и вторая пороговая величина ΔТ2, предпочтительно, представляют собой одинаковую величину порядка 100-300% в секунду. Первая пороговая величина ΔТ1 и вторая пороговая величина ΔТ2 могут каждая представлять собой заданную величину или величину, определяемую в реальном времени. Таким образом, данный вариант обеспечивает водителю надлежащее управление режимом переключения передачи транспортного средства 1.
Возвращение из второго режима М2 в упомянутый первый режим М1 может быть также осуществлено посредством таймера, так что система автоматически возвращается из упомянутого второго режима М2 в упомянутый первый режим М1 по истечении временного периода Т с тех пор, как был инициирован упомянутый второй режим М2.
Фиг.4 представляет собой упрощенную диаграмму состояния в соответствии с вышеописанными вариантами осуществления, когда система приспособлена для работы в упомянутом первом режиме М1 или упомянутом втором режиме М2. Изменение в положении педали 2 акселератора обычно относительно мало, поэтому система чаще всего работает в упомянутом первом режиме М1. В данном режиме, если определено, что производная Δ или положение педали 2 акселератора принимает большую величину по сравнению с первой пороговой величиной ΔТ1, то система переключается на работу в упомянутом втором режиме М2, как показано стрелкой А1. Когда система работает в упомянутом втором режиме М2, если производная для положения педали 2 акселератора принимает меньшую величину по сравнению со второй пороговой величиной ΔТ2, то система возвращается к работе в упомянутом первом режиме М1, как показано стрелкой А2 на фиг.4. Когда система возвращается к работе в упомянутом первом режиме М1, упомянутый второй режим М2 может быть вновь инициирован при удовлетворении условия, что производная Δ для положения педали 2 акселератора принимает большую величину по сравнению с первой пороговой величиной ΔТ1, и так далее.
Коробка 20 передач, предпочтительно, такого типа, который образует часть автоматизированной системы переключения передач, управляемой блоком 110 управления, например ЭБУ. В такой системе переключения передач осуществляются автоматически посредством блока 110 управления, однако в такой системе водитель обычно может осуществлять переключения передач вручную, так называемое механическое переключение передач в автоматическом состоянии (автоматическом режиме). Коробка 20 передач также содержит множество шестерен, например в современных грузовиках предусмотрено двенадцать шестерен переднего хода и одна или более шестерен заднего хода.
В соответствии с другим вариантом осуществления изобретения, посредством перемещений педали 2 акселератора может осуществляться управление целевой скоростью ωТ двигателя. Целевая скорость ωТ двигателя может рассматриваться как требуемая скорость двигателя 10 и может быть определена на основе допущений и знания о режиме работы и характеристиках двигателя 10. На одних скоростях двигатель 10 обычно работает более эффективно и лучше, чем на других. Эффективно и лучше означает меньшее потребление топлива, более низкие уровни вибрации, более тихую работу и др. Для двигателя 10 целевая скорость ωТ двигателя может находиться в пределах 500-2500 об/мин и, предпочтительно, в пределах 1000-1400 об/мин.
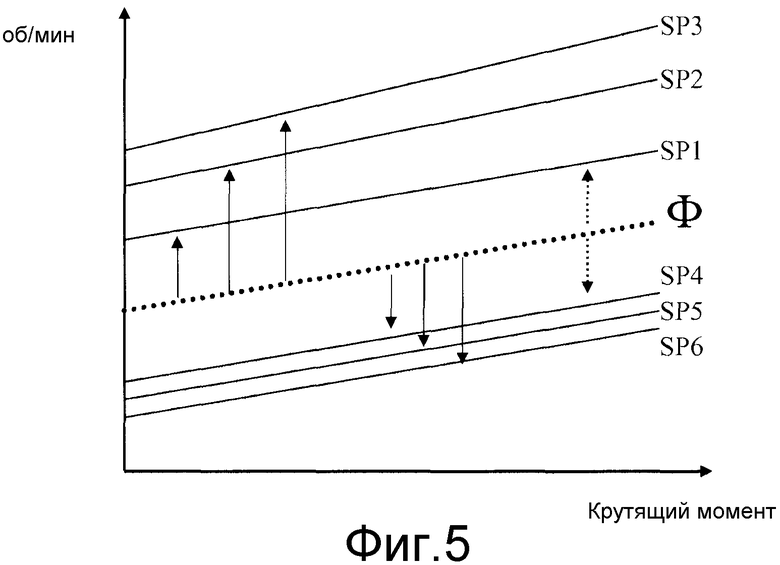
В системе переключения передач с использованием целевой скорости ωТ двигателя, точки понижения и повышения передачи регулируются относительно целевой скорости ωТ двигателя, то есть точки понижения и повышения передачи определяются на основе данной скорости. На фиг.5 линия Φ целевой скорости ωТ двигателя показана в виде пунктирной линии между линиями SP1-SP3 повышения передачи и линиями SP4-SP6 понижения передачи. Стрелки на данном чертеже показывают, как линии SP1-SP3 повышения передачи и линии SP4-SP6 понижения передачи связаны с линией Φ целевой скорости. Это означает, что если линию Φ целевой скорости изменяют (посредством параллельного перемещения вверх или вниз в соответствии с пунктирными стрелками), то скорость двигателя для линий SP1-SP6 переключения будет также параллельно перемещаться. Линии SP1-SP6, например, могут перемещаться в соответствии с перемещением линии Φ целевой скорости пропорционально масштабному коэффициенту, который может различаться соответственно для линий повышения и понижения передачи, но может быть также и одинаковым, в этом случае обеспечивается установленное взаимное соотношение между точками повышения и понижения передачи. Может быть также предусмотрен отдельный масштабный коэффициент для каждой линии SP1-SP6 переключения, т.е. в ответ на данное изменение линии Φ целевой скорости одни линии SP1-SP6 переключения могут изменяться больше или меньше, чем другие линии SP1-SP6 переключения.
Преимущество точек переключения, отслеживающих перемещения педали 2 акселератора посредством управления целевой скоростью ωТ двигателя, состоит в том, что водитель может интуитивно и легко влиять на движение транспортного средства 1. Ограничение на частоту возможных изменений точек переключения решает проблему слишком частых переключений передач вследствие того, что водитель перемещает педаль 2 акселератора, однако тот факт, что система может также работать в упомянутом втором режиме М2 означает, что быстрые перемещения педали акселератора устраняют данное ограничение (в первом режиме М1), позволяя водителю самому решать, часто или нечасто транспортное средство 1 должно переключать передачу, посредством регулирования, насколько быстро он/она перемещает педаль 2 акселератора.
Изобретение относится также к транспортному средству 1, например грузовику или автобусу, содержащему, по меньшей мере, одну упомянутую систему.
Изобретение относится также к способу управления точками переключения на основе перемещения педали 2 акселератора. В соответствии с данным способом, управление точками переключения осуществляется на основе перемещений педали 2 акселератора в первом режиме М1, в котором накладывается ограничение на изменение в точках переключения за единицу времени. В соответствии с одним вариантом осуществления способа, управление точками переключения осуществляется на основе производной Δ для положения педали 2 акселератора, и в варианте данного осуществления управление точками переключения может также осуществляться во втором режиме М2, в котором ограничение не накладывается. Второй режим М2 инициируется, если производная Δ для положения педали 2 акселератора принимает величину, которая больше, чем первая пороговая величина ΔТ1. Кроме того, после управления во втором режиме М2, управление точками переключения может снова осуществляться в первом режиме М1, если абсолютная величина производной Δ для положения педали 2 акселератора принимает меньшую величину по сравнению со второй пороговой величиной ΔТ2. Таким образом, способ в соответствии с данным вариантом осуществления функционирует в соответствии с вышеописанной диаграммой состояния, показанной на фиг.4.
Необходимо также отметить, что способ и варианты осуществления способа могут быть модифицированы в соответствии с различными вариантами осуществления системы для управления коробкой передач в соответствии с изобретением.
Для специалистов будет понятно, что способ управления одной или более точками переключения в соответствии с настоящим изобретением может быть реализован в компьютерной программе, которая, когда она выполняется в компьютере, вынуждает компьютер осуществлять данный способ. Компьютерная программа содержится в машиночитаемом носителе компьютерного программного продукта, который представляет собой пригодную память, например, постоянное запоминающее устройство (ПЗУ), программируемое постоянное запоминающее устройство (ППЗУ), стираемое программируемое постоянное запоминающее устройство (СППЗУ), флэш-память, электрически стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ), накопитель на жестком диске и т.д.
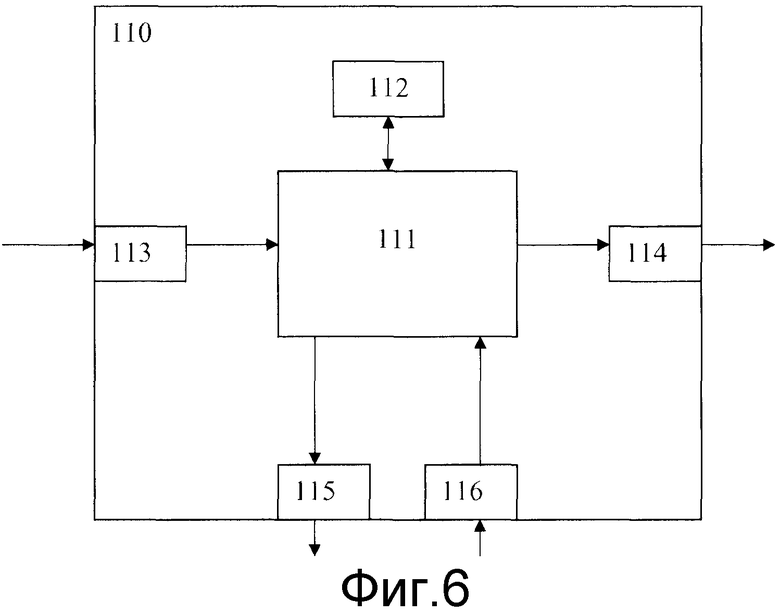
На фиг.6 схематично показан блок 110 управления, образующий часть системы в соответствии с изобретением. Блок 110 управления содержит вычислительное устройство 111, которое может представлять собой любой пригодный тип процессора или микрокомпьютера, например, схему цифровой обработки сигналов (цифровой процессор сигналов (DSP) или схему с заданной конкретной функцией (специализированную интегральную схему (ASIC). Вычислительное устройство 111 соединено с запоминающим устройством 112, которое включено в блок 110 управления и которое обеспечивает вычислительное устройство 111, например, хранимым программным кодом и/или хранимыми данными 111, которые необходимы вычислительному устройству 111 для обеспечения выполнения вычислений. Вычислительное устройство 111 также приспособлено для хранения промежуточных или конечных результатов вычислений в запоминающем устройстве 112.
Блок 110 управления дополнительно содержит устройства 113, 114, 115, 116 соответственно для приема входных сигналов и передачи выходных сигналов. Данные входные и выходные сигналы могут представлять собой формы волны, импульсы или другие признаки, которые устройства 113, 116, принимающие сигналы, способны воспринимать как информацию и которые могут быть преобразованы в сигналы, которые могут быть обработаны вычислительным устройством 111. При этом вычислительное устройство 111 содержит данные сигналы. Устройства 114, 115, передающие сигналы, приспособлены для преобразования сигналов, принимаемых из вычислительного устройства 111, с возможностью образования, например, посредством модуляции сигналов, выходных сигналов, которые могут быть переданы в другие части системы для определения точек понижения и повышения передачи. Специалисту в данной области техники будет понятно, что вышеупомянутый компьютер может представлять собой вычислительное устройство 111 и что вышеупомянутая память может представлять собой запоминающее устройство 112.
Каждое из соединений с соответствующими устройствами соответственно для приема входных сигналов или передачи выходных сигналов может представлять собой одно или более из нижеперечисленного: кабель, шину данных, например шину CAN, шину MOST или какую-либо другую конфигурацию шин или беспроводное соединение. Соединения 70, 80, 90, 100 на фиг.1 могут также представлять собой одно или более из данных кабелей, шин или беспроводных соединений.
Наконец, настоящее изобретение не ограничено вышеописанными вариантами осуществления, а относится к и включает все варианты осуществления, находящиеся в пределах объема охраны прилагаемых независимых пунктов формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОЧЕК ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ | 2010 |
|
RU2505725C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОЧЕК ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ | 2010 |
|
RU2516837C2 |
| ОПРЕДЕЛЕНИЕ ОДНОЙ ИЛИ БОЛЕЕ ТОЧЕК ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ | 2010 |
|
RU2520198C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРЕДЕЛЬНОЙ ДВИЖУЩЕЙ СИЛЫ АВТОМОБИЛЯ | 2010 |
|
RU2540361C2 |
| СИСТЕМА УПРАВЛЕНИЯ КОРОБКОЙ ПЕРЕДАЧ | 2010 |
|
RU2525503C2 |
| СИСТЕМА УПРАВЛЕНИЯ КОРОБКОЙ ПЕРЕДАЧ | 2010 |
|
RU2518393C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЛИЧЕСТВ ШАГОВ ПЕРЕДАЧИ | 2010 |
|
RU2509938C2 |
| СПОСОБ УПРАВЛЕНИЯ КОРОБКОЙ ПЕРЕДАЧ | 2010 |
|
RU2514623C2 |
| СПОСОБ УПРАВЛЕНИЯ КОРОБКОЙ ПЕРЕДАЧ | 2010 |
|
RU2514969C2 |
| СПОСОБ ДЛЯ УПРАВЛЕНИЯ КОРОБКОЙ ПЕРЕДАЧ | 2010 |
|
RU2514627C2 |
Изобретение относится к управлению коробками передач. Система управления одной или более точками переключения передач выполнена с возможностью работы в первом режиме, в котором управление одной или более точками переключения осуществляется на основе перемещений педали акселератора. Также система выполнена с возможностью наложения ограничения на изменение в упомянутой одной или более точках переключения за единицу времени. Способ управления одной или более точками переключения для коробки передач транспортного средства включает управление упомянутой одной или более точками переключения на основе перемещений педали акселератора в первом режиме, в котором накладывается ограничение на изменение в упомянутой одной или более точек переключения за единицу времени. Достигается повышение плавности хода. 3 н. и 12 з.п. ф-лы, 6 ил., 1 табл.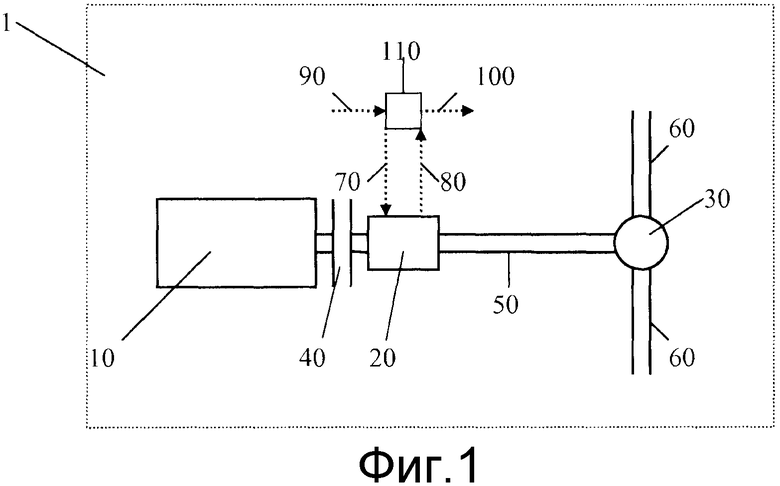
1. Система управления одной или более точками переключения передач, содержащая, по меньшей мере, один блок (110) управления, выполненный с возможностью управления коробкой (20) передач транспортного средства (1), содержащего двигатель (10), который соединен с возможностью приведения с коробкой (20) передач, при этом управление скоростью двигателя (10) осуществляется посредством педали (2) акселератора, которая соединена с двигателем (10) и коробкой (20) передач и может принимать множество положений, причем точка переключения регулируется на основе перемещений педали (2) акселератора и представляет скорость двигателя, при которой коробка (20) передач осуществляет понижение или повышение передачи, отличающаяся тем, что она выполнена с возможностью работы в первом режиме (M1), в котором управление одной или более точками переключения осуществляется на основе перемещений педали (2) акселератора, причем система выполнена с возможностью наложения ограничения на изменение в упомянутой одной или более точках переключения за единицу времени.
2. Система по п.1, отличающаяся тем, что упомянутая одна или более точек переключения управляются на основе производной Δ для положения педали (2) акселератора.
3. Система по п.1 или 2, отличающаяся тем, что она также выполнена с возможностью работы во втором режиме (M2), в котором ограничение не накладывается, причем второй режим (M2) инициируется, если абсолютная величина производной Δ для положения педали (2) акселератора принимает большую величину по сравнению с первой пороговой величиной ΔT1, причем первая пороговая величина ΔT1 представляет собой заданную величину или величину, вычисляемую в реальном времени.
4. Система по п.3, отличающаяся тем, что она также выполнена с возможностью возвращения в первый режим (M1) после работы во втором режиме (М2).
5. Система по п.4, отличающаяся тем, что она возвращается в первый режим (M1) из второго режима (M2), если абсолютная величина производной Δ для положения педали (2) акселератора принимает меньшую величину по сравнению со второй пороговой величиной ΔT2, причем вторая пороговая величина ΔT2 представляет собой заданную величину или величину, вычисляемую в реальном времени.
6. Система по любому из пп.1, 2, 4 или 5, отличающаяся тем, что упомянутое ограничение накладывается посредством фильтра нижних частот и/или многоступенчатого ограничителя.
7. Система по любому из пп.1, 2, 4 или 5, отличающаяся тем, что упомянутое ограничение определяется в виде скорости двигателя в секунду и находится в пределах порядка 1-500 об/с.
8. Система по любому из пп.1, 2, 4 или 5, отличающаяся тем, что порядок величины упомянутого ограничения может быть динамически изменяемым.
9. Система по любому из пп.1, 2, 4 или 5, отличающаяся тем, что педаль (2) акселератора также выполнена с возможностью управления целевой скоростью ωT двигателя, которая представляет собой требуемую скорость двигателя (10).
10. Система по любому из пп.1, 2, 4 или 5, отличающаяся тем, что коробка (20) передач представляет собой автоматическую коробку передач или автоматизированную механическую коробку передач, содержащую множество шестерен, а транспортное средство (1) относится к категории, которая включает в себя грузовики и автобусы.
11. Транспортное средство (1), например грузовик или автобус, отличающееся тем, что оно содержит, по меньшей мере, одну систему по любому из пп.1-10.
12. Способ управления одной или более точками переключения для коробки (20) передач транспортного средства (1), содержащего двигатель (10), который соединен с возможностью приведения с коробкой (20) передач, при этом управление скоростью двигателя (10) осуществляют посредством педали (2) акселератора, которая соединена с двигателем (10) и коробкой передач (20) и может принимать множество положений, и одну или более точек переключения регулируют на основе перемещений педали (2) акселератора, причем каждая из них представляет скорость двигателя, при которой коробка (20) передач осуществляет понижение или повышение передачи, отличающийся тем, что он включает управление упомянутой одной или более точками переключения на основе перемещений педали (2) акселератора в первом режиме (M1), в котором накладывается ограничение на изменение в упомянутой одной или более точек переключения за единицу времени.
13. Способ по п.12, отличающийся тем, что управление упомянутой одной или более точками переключения осуществляют на основе производной Δ для положения педали (2) акселератора.
14. Способ по п.12 или 13, отличающийся тем, что управление упомянутой одной или более точками переключения может также осуществляться во втором режиме (М2), в котором ограничение не накладывается, причем второй режим (М2) инициируется, если абсолютная величина производной Δ для положения педали (2) акселератора принимает большую величину по сравнению с первой пороговой величиной ΔT1, при этом первая пороговая величина ΔT1 представляет собой заданную величину или величину, вычисляемую в реальном времени.
15. Способ по п.14, отличающийся тем, что управление упомянутой одной или более точками переключения может осуществляться в первом режиме (M1) после управления во втором режиме (М2), если абсолютная величина производной Δ для положения педали (2) акселератора принимает меньшую величину по сравнению со второй пороговой величиной ΔT2, причем вторая пороговая величина ΔT2 представляет собой заданную величину или величину, вычисляемую в реальном времени.
| WO 9729307 A1, 14.08.1997 | |||
| WO 2008044609 A1, 17.04.2008 | |||
| US 6085140 A, 04.07.2000 | |||
| Устройство для поворота ротора турбоагрегата | 1977 |
|
SU638742A1 |
| Сталь | 1986 |
|
SU1342939A1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ КОРОБКОЙ ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА | 1994 |
|
RU2126332C1 |

