Область техники
Настоящее изобретение относится к способу определения параметра, который представляет предельную движущую силу автомобиля. В частности, изобретение относится к способу согласно преамбуле независимого пункта 1. Изобретение также относится к использованию такого параметра и, дополнительно, к компьютерной программе, компьютерному программному продукту, системе и автомобилю, связанным с таким параметром.
Уровень техники
Фиг.1 схематически изображает части трансмиссии для автомобиля 1, например пассажирского автомобиля или тяжелого автомобиля, например грузовика или автобуса. Трансмиссия содержит двигатель 10, который в этом случае механически соединен валом с первым концом коробки 20 передач через устройство 40 сцепления. Второй конец коробки 20 передач механически соединен карданным валом 50 с дифференциальной передачей 30, связанной с задним мостом. Задний мост содержит левый и правый ведущие валы 60, которые приводят в действие не изображенные ведущие колеса автомобиля 1.
Благодаря этой общеизвестной конструкции, механическая работа двигателя 10 переносится через ряд устройств трансмиссии, например устройство 40 сцепления, коробку 20 передач, карданный вал 50, дифференциальную передачу 30 и ведущие валы 60, на ведущие колеса для приведения автомобиля 1 в движение.
Коробка 20 передач представляет собой устройство трансмиссии, которое имеет несколько прямых передач для обеспечения движения автомобиля 1 вперед и обычно также одну или более задних передач. Количество прямых передач варьируется, но, например, в грузовиках большинства современных моделей обычно используется двенадцать прямых передач.
Передаточное число трансмиссии может изменяться, что позволяет ей обеспечивать различные передаточные числа (т.е. различные конфигурации передаточных чисел). При этом различные передаточные числа зависят от передачи, включенной в данный момент в коробке 20 передач, и от передаточного числа дифференциальной передачи 30. Можно дополнительно отметить, что существуют трансмиссии, которые могут обеспечивать несколько разных дискретных передаточных чисел, а также трансмиссии, имеющие непрерывный диапазон передаточных чисел, например автоматические коробки 20 передач с так называемыми гидротрансформаторами или другие типы коробок 20 передач с непрерывно изменяемыми передаточными числами.
Кроме того, большинство автомобилей 1 снабжено системой управления, содержащей один или более электронных блоков 110 управления (ECU). Упомянутая система управления предназначена для контроля/регулировки одной или более функциями в автомобиле 1, например, посредством одного или более приводных механизмов, которые могут быть связаны с различными функциями в автомобиле 1, например управлением двигателем, переключением передач, круиз-контролем, регулировкой подвески и т.д., и упомянутая система управления использует несколько разных параметров, например текущие обороты двигателя, текущую позицию педали акселератора, текущий крутящий момент двигателя и данные от различных датчиков, для управления различными функциями автомобиля 1. Таким образом, эти параметры используются в качестве входных параметров в системе управления для управления различными функциями в автомобиле 1.
Сущность изобретения
Задачей настоящего изобретения является предложение способа определения параметра, который учитывает дорожную ситуацию автомобиля, например пассажирского автомобиля, автобуса или грузовика. Другой задачей изобретения является предложение способа использования такого параметра в приложениях, связанных с одной или более функциями, например, в автомобиле. Дополнительной задачей изобретения является предложение параметра, который можно использовать для улучшения управления и/или производительности одной или более функциями в автомобиле по сравнению с использованием параметров, отвечающих уровню техники.
Согласно аспекту изобретения, вышеозначенные задачи решаются за счет способа определения первого параметра R F, который представляет предельную движущую силу автомобиля (1), снабженного трансмиссией, которая выполнена с возможностью обеспечивать различные передаточные числа для приведения в движение упомянутого автомобиля (1) и которая содержит по меньшей мере один двигатель (10) и по меньшей мере одну коробку (20) передач. Этот первый параметр R 1 определяется на основании разности между первой движущей силой F Max и второй движущей силой F Dr, причем первая движущая сила F Max является максимальной движущей силой, доступной для автомобиля (1) при текущем передаточном числе, и вторая движущая сила F Dr является текущим сопротивлением движению для автомобиля (1).
Вариант осуществления вышеописанного способа дополнительно содержит определение второго параметра R Acc, который представляет предельное ускорение автомобиля (1) и который задается как отношение между вышеупомянутым первым параметром R F и нормирующим множителем. Дополнительные варианты осуществления вышеописанного способа отражены в зависимых пунктах формулы изобретения, относящихся к способу.
Изобретение также относится к компьютерной программе и компьютерному программному продукту, связанным с вышеописанными способами.
Согласно другому аспекту изобретения, вышеозначенные задачи решаются за счет системы для определения первого параметра R F, который представляет предельную движущую силу автомобиля (1), причем система содержит по меньшей мере один блок (110) управления, выполненный с возможностью управления одной или более функциями упомянутого автомобиля (1), снабженного трансмиссией, которая выполнена с возможностью обеспечивать различные передаточные числа для приведения в движение упомянутого автомобиля (1) и которая содержит по меньшей мере один двигатель (10) и по меньшей мере одну коробку (20) передач. Этот блок (110) управления выполнен с возможностью определения упомянутого первого параметра R F на основании разности между первой движущей силой F Max и второй движущей силой F Dr, причем первая движущая сила F Max является максимальной движущей силой, доступной для автомобиля (1) при текущем передаточном числе и вторая движущая сила F Dr является текущим сопротивлением движению для автомобиля (1).
Варианты осуществления вышеописанной системы отражены в зависимых пунктах формулы изобретения, относящихся к системе.
Изобретение дополнительно относится к использованию параметра, определяемого согласно любому(й) из вышеописанных способов или систем. Изобретение также относится к автомобилю, содержащему по меньшей мере одну такую систему.
Способ и система согласно настоящему изобретению позволяют получить параметр, который содержит и учитывает дорожную ситуацию автомобиля при определении его предельной движущей силы. Такой параметр, таким образом, применим в области применения, связанной с контролем и мониторингом различных функций, и, в частности, непосредственно применяется при моделировании позиции виртуальной педали акселератора или виртуального водителя. Кроме того, результаты любого упомянутого моделирования сами по себе применимы опосредованно в других приложениях, например, при выборе стратегии переключения передач и отображении подсказок для водителей.
Дополнительные преимущества и применения устройства и системы согласно изобретению будут указаны в нижеприведенном подробном описании.
Краткое описание чертежей
Ниже приведено подробное описание настоящего изобретения, где описаны варианты осуществления изобретения со ссылкой на прилагаемые чертежи, на которых:
фиг. 1 схематически изображает часть трансмиссии для автомобиля;
фиг. 2 - график максимального крутящего момента как функции оборотов двигателя;
фиг. 3 - график отображающей функции, которая преобразует значения, представляющие предельное ускорение автомобиля, в значения виртуальной педали акселератора;
фиг. 4 - график отображающей функции, которая преобразует значения, представляющие предельное ускорение автомобиля, в значения виртуальной педали акселератора согласно настройке круиз-контроля;
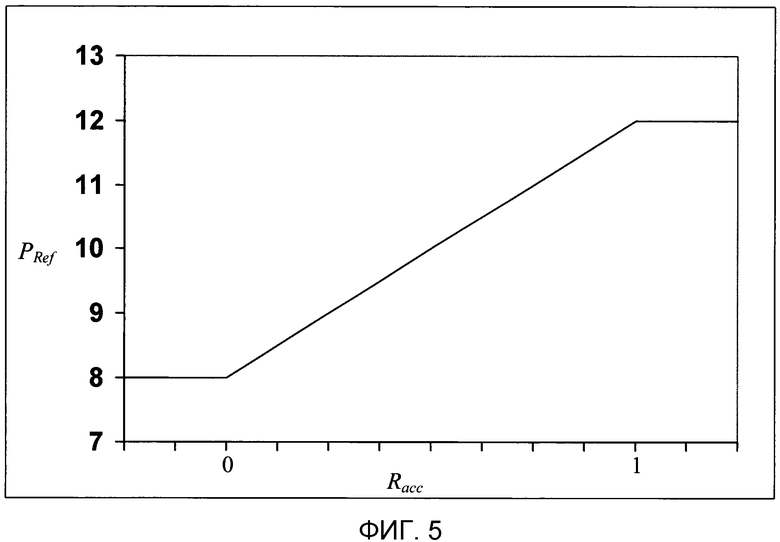
фиг. 5 - график эталонного давления для воздушного компрессора как функции предельного ускорения для автомобиля, применимый при определении, когда нужно накачивать ресиверы автомобиля;
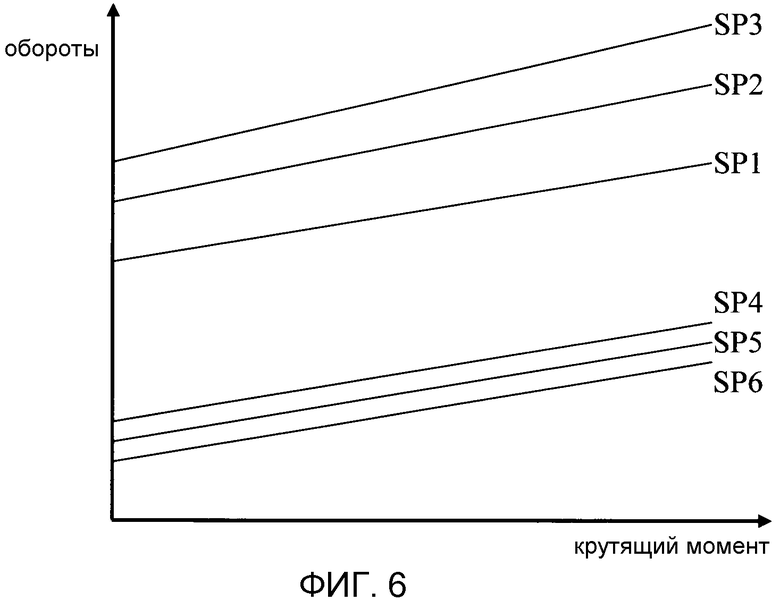
фиг. 6 - график линий понижения передачи и повышения передачи для коробки передач;
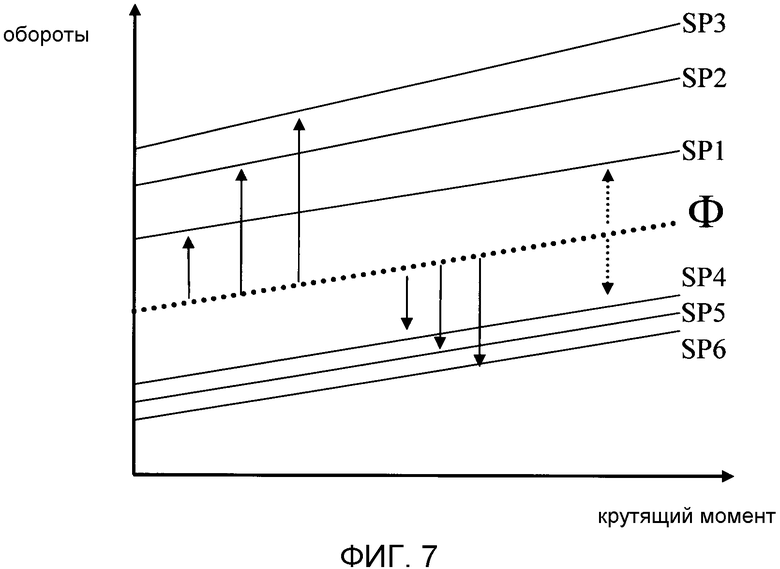
фиг. 7 изображает линии понижения передачи и повышения передачи, относящиеся к линии целевых оборотов двигателя;
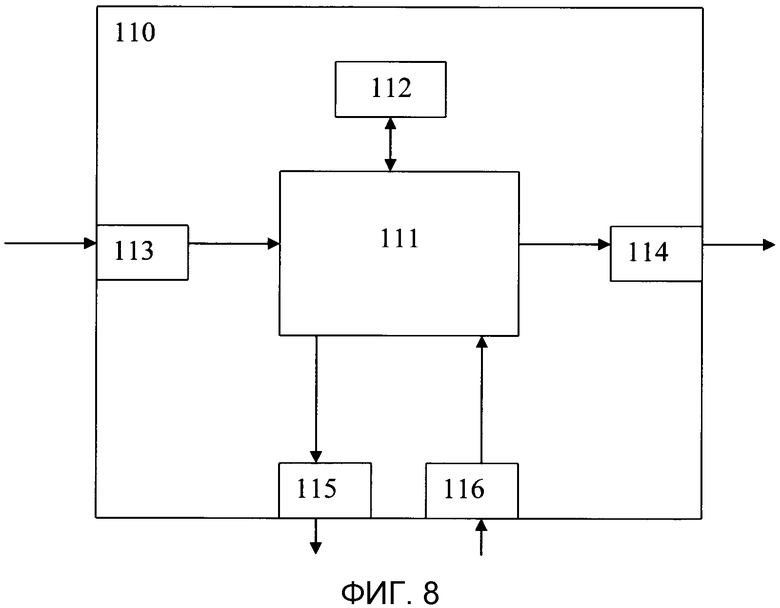
фиг. 8 изображает блок управления, призванный составлять часть системы согласно изобретению; и
фиг. 9 - логическая блок-схема для определения значения виртуальной педали акселератора с использованием значений предельного ускорения автомобиля.
Подробное описание изобретения
Как упомянуто выше, система управления автомобиля 1 использует несколько входных параметров для управления различными функциями в автомобиле 1. Эти входные параметры могут представлять собой, например, текущие обороты двигателя, текущую позицию педали акселератора, текущий крутящий момент двигателя и данные от одного или более датчиков, которыми снабжен автомобиль 1.
Однако авторы изобретения установили, что использование таких параметров согласно современному состоянию техники может приводить к тому, что контроль/регулировка функций автомобиля 1 будет осуществляться в менее преимущественном режиме, поскольку входные параметры согласно современному состоянию техники не учитывают мгновенную дорожную ситуацию автомобиля 1 и, таким образом, можно сказать, имеют недостаточно обширное информационное наполнение. Например, стратегия переключения передач может иметь тенденцию становиться статической, и расход топлива может становиться выше необходимого, поскольку упомянутая дорожная ситуация не учитывается при определении этих входных параметров согласно современному состоянию техники. Примеры различных дорожных ситуаций содержат вождение автомобиля 1 по подъемам, спускам, вершинам холмов и низинам, т.е. дорожные ситуации, по существу связанные с уклоном дороги в направлении движения автомобиля 1, но также такие факторы, как изменяющееся сопротивление воздуха, изменяющаяся масса автомобиля и т.д.
Из вышесказанного следует, что существует необходимость в способе и системе для определения параметра, который учитывает дорожные ситуации автомобиля 1. Этот параметр предпочтительно использовать в качестве входного параметра в области применения, связанной с различными функциями в автомобиле 1.
Таким образом, настоящее изобретение относится к способу определения первого параметра R F, который представляет предельную движущую силу автомобиля 1, например пассажирского автомобиля, автобуса или грузовика. Автомобиль 1 снабжен трансмиссией, которая выполнена с возможностью обеспечивать различные передаточные числа для приведения автомобиля 1 в движение и которая содержит по меньшей мере один двигатель 10 и по меньшей мере одну коробку 20 передач.
Согласно изобретению, первый параметр R F определяется на основании разности между первой движущей силой F Max и второй движущей силой F Dr, причем первая движущая сила F Max является максимальной движущей силой, доступной для автомобиля 1 при текущем передаточном числе трансмиссии, и вторая движущая сила F Dr является текущим сопротивлением движению для автомобиля 1. Текущее передаточное число трансмиссии означает соответствующее отношение для трансмиссии, которая приводит в движение автомобиль 1.
В частности, первый параметр R F можно рассматривать как разность между первой движущей силой F Max, которая представляет максимальную сумму доступных движущих сил, которые “способствуют” продвижению автомобиля 1 в направлении его движения при текущем передаточном числе трансмиссии, т.е. доступная движущая сила автомобиля 1 за минусов второй движущей силы F Dr, которая равна сумме движущих сил, действующих на автомобиль 1 в направлении его движения или в противоположном направлении, и является его текущим сопротивлением движению.
На фиг. 2 показан график кривой максимального крутящего момента для двигателя 10 как функция его оборотов. Точки P1-P3 на графике представляют различные точки перехода для кривой максимального крутящего момента. График также отражает пример ситуации, когда двигатель 10 работает на оборотах R1 с крутящим моментом M1 двигателя, таким образом, работая ниже своей кривой максимального крутящего момента с разностью, равной M2-M1, которая проиллюстрирована стрелкой. Таким образом, максимальная движущая сила означает движущую силу, которая, через трансмиссию, приводит в движение автомобиль 1 в направлении его движения, если двигатель 10 работает на своей кривой максимального крутящего момента при текущих оборотах двигателя.
В частности, первая движущая сила F Max согласно варианту осуществления изобретения задается как

где Eng Tot обозначает доступный крутящий момент при максимальном крутящем моменте двигателя для двигателя 10 при текущих оборотах двигателя, и i Tot обозначает текущее передаточное число для трансмиссии до ведущих колес включительно автомобиля 1, с учетом радиуса колеса.
Согласно другому варианту осуществления, вторая движущая сила F Dr - это движущая сила, которая может принимать положительное значение (например, на подъемах) или отрицательное значение (например, на спусках) и действует в направлении, противоположном направлению движения автомобиля 1. Вторая движущая сила F Dr зависит от одного или более параметров из сопротивления воздуха, сопротивления качению, трения в упомянутой трансмиссии, момента инерции, массы упомянутого автомобиля 1, уклона дороги, т.е. факторов, влияющих на текущее сопротивление движению. Однако данные топографической карты и пр. также можно использовать при определении второй движущей силы F Dr, поскольку, например, уклон дороги можно получить из соответствующих картографических данных.
В частности, вторая движущая сила F Dr согласно варианту осуществления изобретения задается как

где F Rf обозначает текущую фактическую движущую силу для двигателя 10, m - массу и a - ускорение автомобиля 1. В примере, приведенном на фиг. 2, фактическая движущая сила двигателя 10 равна M1.
В подавляющем большинстве случаев вторая движущая сила F Dr будет движущей силой, которая варьируется в большей степени, поскольку, например, уклон дороги является параметром, который влияет на нее. Однако первая движущая сила F Max также будет варьироваться, поскольку передаточное число трансмиссии варьируется в соответствии с такими факторами, как текущее передаточное число в коробке 20 передач, радиус колеса автомобиля 1, изменения кривой максимального крутящего момента двигателя 10 и т.д. Однако по большей части мощность двигателя и передаточное число для дифференциальной передачи, которые также составляют часть выражения для первой движущей силы F Max, будет постоянной.
Согласно дополнительному варианту осуществления изобретения, первый параметр определяется как

т.е. первый параметр R F задается как разность согласно уравнению (3) и будет принимать отрицательное значение, положительное значение или нулевое значение. Отрицательная разность означает, что автомобиль 1 не может ускоряться при текущем передаточном числе трансмиссии, т.е. автомобиль 1 испытывает недостаток мощности и будет терять скорость (т.е. замедляться); нулевая разность означает, что автомобиль 1 находится в состоянии равновесия мощности, в котором он может поддерживать текущую скорость, но не может ускоряться до более высокой скорости; и положительная разность означает, что автомобиль 1 способен ускоряться, по крайней мере, если двигатель 10 работает на своей кривой максимального крутящего момента для данных оборотов двигателя, как указано на фиг. 2, т.е. автомобиль 1 имеет избыток мощности.
Первый параметр R F обеспечивает абсолютную меру текущей предельной движущей силы/предельного ускорения автомобиля 1, поскольку он связан с его текущими характеристиками и дорожной ситуацией, и это означает, что для того чтобы можно было применять первый параметр R F, он должен быть связан с упомянутыми характеристиками и дорожной ситуацией. Примерами характеристик являются масса автомобиля, мощность двигателя и конфигурация трансмиссии; и примерами дорожных ситуаций являются уклон дороги и поверхность дороги. Поскольку первый параметр R F является абсолютной мерой, значение, например, R F = 10000 N представляет большое предельное ускорение для автомобиля 1 массой 1000 кг и очень малое предельное ускорение для автомобиля 1 массой 100000 кг.
Напротив, соотнесение разности согласно уравнению (3) с текущей доступной предельной движущей силой автомобиля 1 обеспечивает относительную меру текущего предельного ускорения автомобиля (специалистам очевидно, что ускорение можно, конечно, также получить из первого параметра R F на основании соотношения между ускорением и мощностью согласно законам физики), которую можно рассматривать как его способность к ускорению. В результате получается безразмерная величина, содержащая информацию о мощности двигателя автомобиля 1, уклоне дороги, сопротивлении качению, сопротивлении воздуха и т.д.
Преимущество вышеописанной относительной меры в том, что она обеспечивает значение, которое указывает, сколько доступной мощности двигателя потребуется для ускорения автомобиля 1. Это означает, что упомянутое значение можно с преимуществом использовать непосредственно или опосредованно в различных приложениях, связанных с различными функциями, например стратегий управления, в отношении, например, выбора передаточного числа, эксплуатации генератора, эксплуатации воздушного компрессора и т.д. Если в результате расчета R Acc получается, что мощности двигателя не хватает для ускорения автомобиля 1, система управления может попытаться ограничить использование ресурсов, которые поглощают энергию (например, воздушного компрессора, генератора и т.д.), в то же время пытаясь обеспечить работу двигателя 10 на оборотах, которые позволяют максимальную движущую силу. Это означает, что система управления пытается как можно полнее использовать крутящий момент двигателя 10 для приведения автомобиля 1 в движение, вместо того чтобы, например, наполнять ресиверы воздухом, каковые действия система будет стараться производить в то время, когда у нее появится возможность использовать «даровую» энергию, например, при торможении двигателем автомобиля 1 на спусках. Таким образом, очевидно, что упомянутый параметр применим во многих различных функциях в автомобиле 1, и в нижеследующем описании он называется вторым параметром R Acc .
Таким образом, вариант осуществления изобретения относится к способу определения второго параметра R Acc, который представляет предельное ускорение автомобиля 1 и который определяется как отношение между первым параметром R F и нормирующим множителем. В предпочтительном варианте осуществления, второй параметр определяется как

где величина в знаменателе является нормирующим множителем, так что автомобиль 1 испытывает избыток ускорения, если R Acc>0, недостаток ускорения, если R Acc<0, и находится в состоянии равновесия ускорения, если R Acc=0. Кроме того, если R Acc>1, всю мощность двигателя можно использовать для ускорения автомобиля 1, в каковом случае его скорость увеличивается без необходимости подвода какой-либо мощности от двигателя 10 (как на крутых спусках).
Второй параметр R Acc применим во многих областях применения, связанных с различными функциями в автомобиле 1, например, при определении “значения виртуальной педали акселератора”, которое затем используется в качестве входных данных в прочих приложениях в автомобиле 1.
Таким образом, исходя из вышесказанного, настоящее изобретение также относится к использованию первого параметра R F и/или второго параметра R Acc в нескольких разных применениях, связанных с различными функциями в автомобиле 1, например:
• определение значения виртуальной педали акселератора или виртуального водителя;
• управление выбором передачи и выбор стратегий переключения передач;
• управление вспомогательным оборудованием, например компрессором, генератором и компрессором кондиционера;
• подсказки водителю, например, для определения, экономично ли водитель ведет машину, например, при движении задним ходом; и
• поддержание скорости с помощью круиз-контроля.
Как упомянуто выше, первый параметр R F или второй параметр R Acc можно использовать для определения значения виртуальной педали акселератора. В этом контексте, значение виртуальной педали акселератора означает теоретически вычисленное значение, которое может отличаться, и обычно отличается, от значения фактической педали акселератора, причем последнее является фактическим значением, принимаемым педалью акселератора, когда водитель нажимает на нее во время движения автомобиля 1. Если для вычисления такого значения виртуальной педали акселератора используется второй параметр R Acc, это можно делать посредством отображающей функции, например, изображенной на графике на фиг. 3, где представлена зависимость значения Pv виртуальной педали акселератора (ось y) от второго параметра R Acc (ось x), который представляет предельное ускорение для автомобиля 1.
На Фиг. 3 показано, как значение виртуальной педали акселератора преобразуется упомянутой отображающей функцией в 100%, соответствующие полному ускорению, когда второй параметр R Acc принимает значение, меньшее 0, и в 0%, соответствующий отсутствию ускорения, когда R Acc принимает значение, превышающее 1. Такое отображение второго параметра R Acc означает, что значение виртуальной педали акселератора преобразуется в 100% в ситуациях равновесия мощности или недостатка мощности, т.е. когда R Acc<0, и в значение от 0 до 100%, когда автомобиль испытывает избыток мощности (на фиг. 3 функция линейна в этом диапазоне).
Когда всю мощность двигателя можно использовать для ускорения автомобиля 1, т.е. когда R Acc=1, значение педали акселератора преобразуется в 0%, ситуация, когда возможное приложение призвано имитировать движение педали акселератора, выполняемое реальным водителем, когда он ведет машину экономично и желает поддерживать постоянную скорость, т.е. сбрасывая газ на вершинах холмов и на спусках и давая больше газа в начале восходящих участков дороги и на подъемах. Таким образом, поведение реального водителя моделируется виртуальным водителем согласно этому приложению. Таким образом, очевидно, что значение виртуальной педали акселератора применимо в области применения, которая зависит от значения педали акселератора, например, при моделировании виртуальных водителей для обеспечения подсказок для водителей, управления вспомогательного оборудования, отображения подсказок для водителей и т.д. Следует также отметить, что значение виртуальной педали акселератора можно использовать либо как единственный входной параметр в упомянутых приложениях, либо совместно с другими входными параметрами, например значением фактической педали акселератора.
Фиг. 4 изображает пример отображающей функции значения виртуальной педали акселератора при использовании круиз-контроля. По оси y отложены допустимые значения для виртуальной педали акселератора, и по оси x отложена разность между желаемой скоростью, на которую настроен круиз-контроль (т.е. желаемой скоростью, установленную на круиз-контроле), и текущей фактической скоростью автомобиля 1. Эта разность между двумя скоростями будет определять допустимые значения, которые может принимать виртуальная педаль акселератора, и значение виртуальной педали акселератора второго параметра R Acc определяется между этими предельными значениями (например, посредством отображающей функции, изображенной на фиг. 3). Например, при езде в режиме круиз-контроля, системе управления известна скорость, с которой водитель желает вести автомобиль 1, что позволяет учитывать отклонение (смещение) от V Set, т.е. желаемой скорости, соответствующей значению смещения 0 на фиг. 4. Если скорость падает ниже V Set, свобода движения значения педали уменьшается, и значение педали смещается к максимальному значению (Max на фиг. 4). Аналогично, если скорость увеличивается сверх V Set, свобода движения также уменьшается, и значение педали соответственно смещается к минимальному значению (Min на фиг. 4) с целью поддержания желаемой скорости V Set автомобиля 1.
Такая версия означает, что второй параметр R Acc будет входным параметром при вычислении педали акселератора в связи с применением круиз-контроля, когда система старается поддерживать постоянную скорость автомобиля 1, в зависимости от различных дорожных условий, например уклона дороги, и ограничения значения педали акселератора указывают, желает ли система увеличить/уменьшить скорость автомобиля. В частности, в этом приложении система пытается использовать виртуального водителя для моделирования реального водителя, стремящегося поддерживать постоянную скорость, и это означает, что если автомобиль 1 движется быстрее/медленнее целевых оборотов, это компенсируется, соответственно, снижением или повышением скорости. Напротив, если автомобиль 1 движется с желаемой скоростью, внешние факторы, например уклон дороги, сопротивление воздуха, масса автомобиля и т.д., определяют значение педали акселератора (R Acc в модели).
Система может дополнительно моделировать позицию виртуальной педали акселератора, применяемую умозрительным водителем, который экономично ведет автомобиль 1, например, отпуская акселератор на вершинах холмов и на спусках и применяя большее ускорение, когда автомобиль 1 начинает двигаться вверх. Тогда позицию виртуальной педали акселератора можно использовать в качестве входного параметра в системах, установленных на автомобиле 1, которые используют фактическую позицию педали акселератора в качестве входного параметра. Затем такую процедуру можно использовать, например, для управления выбором передачи в автомобиле 1, который движется в режиме круиз-контроля, с учетом виртуальной педали акселератора, позволяющего переключать передачи таким образом, чтобы обеспечивать очень низкие обороты двигателя и, следовательно, также снижение расхода топлива и механического износа. Примером таких ситуаций является движение на спусках, когда двигатель 10 “работает в пассивном режиме”, т.е. применяется торможение двигателем. Включение высокой передачи (например, повышающей передачи) в такой ситуации, приводящее к очень низким оборотам двигателя, снижает трение двигателя 10 и позволяет вместо этого ускорять автомобиль 1 с использованием энергии, которая иначе терялась бы вследствие торможения двигателем.
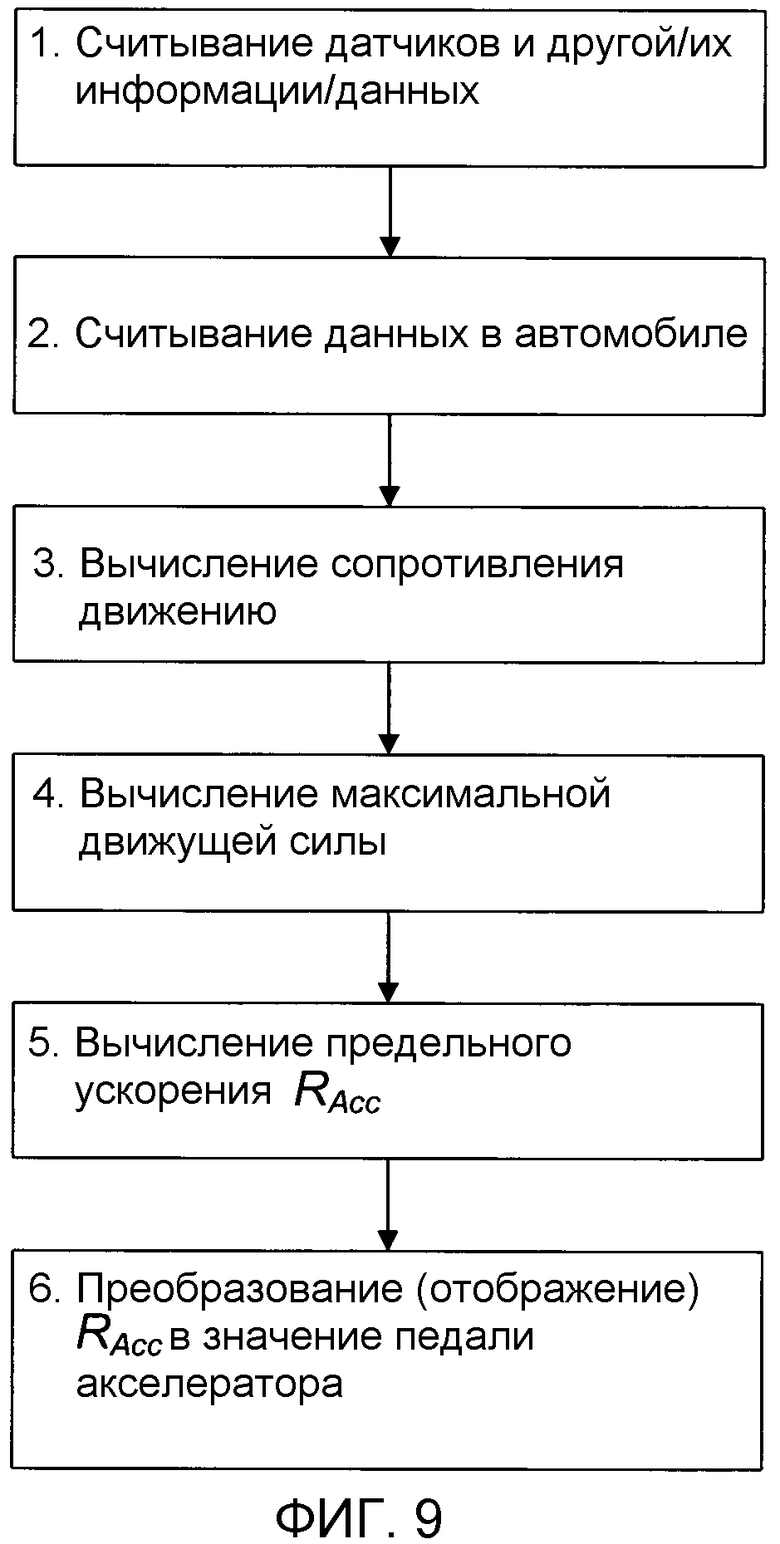
Более подробно, определение значения виртуальной педали акселератора может, например, осуществляться согласно логической блок-схеме, показанной на фиг. 9, содержащей следующие этапы:
1. Считывание различных датчиков, которыми снабжен автомобиль 1, и считывание доступной/ых информации/данных из других систем в автомобиле 1, например из системы управления двигателем, системы управления тормозами и системы управления коробкой передач;
2. Считывание в автомобиле данных о конфигурации блока управления, содержащих соответствующую информацию о конфигурации автомобиля 1, например передаточном числе дифференциала, типе коробки 20 передач и т.д.;
3. Вычисление текущего сопротивления движению F Dr автомобиля 1 на основании информации/данных, полученной/ых на вышеописанных этапах 1 и 2;
4. Вычисление текущей максимальной движущей силы F Max автомобиля 1 при текущем передаточном числе трансмиссии на основании максимального крутящего момента на маховике, который двигатель 10 может развивать при текущих оборотах двигателя (сравните с кривой крутящего момента на фиг. 2);
5. Вычисление на основании значений, полученных на вышеописанных этапах 3 и 4, предельного ускорения R Acc автомобиля 1, которое определяется как предельная движущая сила R F, нормированная нормирующим множителем; и
6. Преобразование предельного ускорения R Acc автомобиля 1 в значение (Pv) виртуальной педали акселератора, которое можно производить любыми из вышеописанных способов отображения.
Первый параметр R F и/или второй параметр R Acc также можно использовать при управлении различным вспомогательным оборудованием, например воздушными компрессорами, генераторами и компрессорами кондиционеров в автомобиле 1. Управление воздушным компрессором можно осуществлять таким образом, чтобы эталонное давление, существующее в компрессоре для нагнетания воздуха, росло, когда автомобиль 1 испытывает избыток мощности/избыток ускорения, и это означает, что система использует добавочную энергию, приобретаемую, например, на спусках, для приведения в действие компрессора в этих ситуациях и, таким образом, стремится обеспечивать высокое давление в ресиверах, когда система располагает «даровой» энергией, и, напротив, более низкое давление в ресиверах, когда энергию нужно отбирать от двигателя 10, и это означает, что система избегает использования воздушного компрессора при впрыске топлива в двигатель 10, таким образом, избегая сообщения выходной мощности воздушному компрессору в таких ситуациях. Фиг. 5 иллюстрирует пример того, как можно непосредственно управлять эталонным давлением воздушных компрессоров посредством второго параметра R Acc. Этот пример показывает, как эталонное давление P Ref выражается как функция предельного ускорения R Acc автомобиля 1. Функция на фиг. 5 показывает, что эталонное давление P Ref является низким, когда автомобиль 1 испытывает недостаток ускорения (недостаток мощности), и высоким, когда он испытывает избыток ускорения (избыток мощности), с линейным ростом эталонного давления между этими значениями. Эталонное давление P Ref также может опосредованно регулироваться вторым параметром R Acc, благодаря своей зависимости от значения виртуальной педали акселератора, которое само определяется вторым параметром R Acc.
Первый параметр R F и/или второй параметр R Acc дополнительно используются при определении выбора передачи и стратегии переключения передач для коробки 20 передач.
В автомобиле 1 обычно используется коробка 20 передач ручного или автоматического типа (автоматическая коробка передач), а также коробка передач полуавтоматического типа (полуавтоматическая коробка передач, AMT). Автоматические коробки передач и полуавтоматические коробки передач представляют собой автоматизированные системы коробки передач, обычно управляемые блоком 110 управления, который выполнен с возможностью управления коробкой 20 передач, например, при переключении передач, как при выборе передач при определенной скорости автомобиля с определенным сопротивлением движению. Блок 110 управления может измерять обороты двигателя и состояние коробки 20 передач и управлять коробкой передач посредством электромагнитных клапанов, присоединенных к пневматическим устройствам. Информация о двигателе 10, например его оборотах и крутящем моменте, также поступает от двигателя 10 на блок 110 управления, например, через шину CAN (контроллерной сети).
В традиционных системах переключения передач блок 110 управления использует табличные значения предельных оборотов двигателя, также именуемые точками переключения, которые представляют обороты двигателя, при которых в коробке 20 передач должно осуществляться понижение передачи или повышение передачи, т.е. автомобиль 1 переключает передачу, когда обороты его двигателя 10 проходят значение, представленное точкой переключения. Таким образом, можно сказать, что точки переключения предоставляют информацию не только о том, когда должно произойти понижение передачи или повышение передачи, но и о количестве ступеней переключения передач, которые должны быть пройдены при каждом понижении передачи или повышении передачи. Обычно каждая точка переключения содержит от одной до трех ступеней переключения передач, но возможно большее количество ступеней.
Фиг. 6 схематически изображает пример различных табличных точек переключения, представленных линиями SP1-SP6 на графике, где по оси x отложен крутящий момент двигателя и по оси y отложены обороты двигателя 10, измеряемые в оборотах в минуту (об/мин). При условии, что обороты двигателя находятся между линиями SP1 и SP4 переключения, переключения передач не происходит, но если они возрастают сверх линии SP1-SP3 повышения передачи, инициируется повышение передачи, и, напротив, инициируется понижение передачи, если обороты двигателя падают ниже линии SP4-SP6 понижения передачи. В нижеприведенной Таблице 1 показано несколько повышающих или понижающих ступеней переключения передач для каждой из линий SP1-SP6. Например, происходит повышение передачи на одну ступень, когда обороты двигателя возрастают сверх линии SP1, и понижение передачи на две ступени, когда обороты двигателя падают ниже линии SP5.
Линии понижения передачи и повышения передачи SP1-SP6
При этом выбор точки переключения влияет на характеристики движения и расход топлива автомобиля 1, поэтому автопроизводители должны тщательно калибровать точки переключения. Эта калибровка предусматривает испытание различных стратегий переключения передач в условиях эксплуатации в различных ситуациях вождения, например при различных величинах применяемого ускорения, различных уклонах дороги и различных значениях полной массы автомобиля. Результаты испытаний подлежат тщательному анализу для установления надлежащих точек переключения.
Количества ступеней переключения передач в традиционных системах переключения передач дополнительно устанавливаются путем регулярного измерения ускорения автомобиля 1, и количество ступеней переключения передач определяется на основании полученных данных измерения. В таких традиционных системах высокое измеренное ускорение приводит к увеличению числа ступеней переключения передач, и низкое измеренное ускорение приводит к сокращению числа ступеней переключения передач. Затем измеренное ускорение сравнивается с различными пороговыми значениями ускорения, сохраненными в таблицах, и именно на основании определения упомянутых пороговых значений принимается решение о количестве ступеней переключения передач, подлежащих выполнению при переключении передачи в данной дорожной ситуации. Пороговые значения зависят от двигателя и, таким образом, регулируются для конкретного двигателя 10. Чтобы определить правильные пороговые значения, автопроизводителям приходится осуществлять тщательную калибровку.
Таким образом, очевидно, что первый параметр и/или второй параметр применимы при определении точек переключения для коробки 20 передач, поскольку эти параметры обеспечивают меру предельной мощности/предельного ускорения автомобиля 1. Если автомобиль 1 имеет большое предельное ускорение, допустимы точки переключения, которые приводят к низкому расходу топлива, что в большинстве случаев означает низкие обороты двигателя, но если автомобиль 1 имеет низкое предельное ускорение, требуются точки переключения, которые приводят к максимально возможной движущей силе автомобиля 1, что в большинстве случаев означает высокие обороты двигателя для получения высокой выходной мощности.
Первый параметр R F и/или второй параметр R Acc также применимы непосредственно или опосредованно (через определение значения виртуальной педали акселератора) при определении целевых оборотов для коробки 20 передач. Целевые обороты ω T можно рассматривать как желаемые обороты двигателя 10 автомобиля 1 и можно определять на основании предположений и сведений о режиме работы и производительности двигателя 10. Двигатель 10 обычно работает более эффективно и лучше на определенных оборотах, чем на других. Более эффективно и лучше означает меньший расход топлива, более низкие уровни вибрации, более тихую работу и т.д. Целевые обороты ω T могут находиться в диапазоне целевых оборотов двигателя 500-2500 об/мин и, предпочтительно, в диапазоне 1000-1400 об/мин для двигателя 10 тяжелого автомобиля, например грузовика или автобуса, и обычно выше для пассажирских автомобилей.
В системе переключения передач с целевыми оборотами ω T точки понижения передачи и повышения передачи регулируются относительно цели, и это означает, что они определяются на основании оборотов ω T. Если автомобиль 1 имеет возможность бесступенчатого изменения передаточного числа, обороты двигателя 10 можно регулировать так, чтобы при низком значении R Acc он работал на оборотах, обеспечивающих высокую движущую силу, и при низком значении R Acc он работал на оборотах, обеспечивающих низкий расход топлива.
На фиг. 7 линия Φ целевых оборотов двигателя в форме пунктирной линии изображена между линиями SP1-SP3 повышения передачи и линиями SP4-SP6 понижения передачи. Стрелки на графике показывают, как связаны линии SP1-SP3 повышения передачи и линии SP4-SP6 понижения передачи с линией Φ целевых оборотов. Это означает, что при изменении линии Φ целевых оборотов (путем параллельного перемещения вверх или вниз, указанного пунктирными стрелками) обороты двигателя для линий SP1-SP6 переключения также будут перемещаться параллельно. Линии SP1-SP6 переключения могут, например, сопровождать линию Φ целевых оборотов пропорционально с масштабным коэффициентом, который может быть разным для линий повышения передачи и понижения передачи соответственно, но также может быть одинаковым, в каковом случае достигается установленное соотношение между точками повышения передачи и понижения передачи. Каждая линия SP1-SP6 переключения также может иметь индивидуальный масштабный коэффициент, т.е. определенные линии SP1-SP6 переключения могут изменяться больше или меньше, чем другие линии SP1-SP6 переключения в ответ на одно и то же изменение линии Φ целевых оборотов.
Дополнительные описания и примеры областей применения первого параметра R F и/или второго параметра R Acc приведены в неопубликованных шведских патентных заявках SE 0950654-4, SE 0950655-1, SE 0950656-9, SE 0950668-4, SE 0950657-7, SE 0950658-5, SE 0950659-3, SE 0950667-6, SE 0901182-6 и SE 0950660-1. Упомянутые параметры также применимы в приложениях, описанных в трех неопубликованных шведских патентных заявках, озаглавленных “Method and system for driving of a vehicle I”, “Method and system for driving of a vehicle II” и “Method and system for driving of a vehicle III”, которые имеют такую же дату подачи, как настоящая заявка, и того же заявителя.
Специалистам очевидно, что способ определения первого параметра R F или второго параметра R Acc, представляющего, соответственно, абсолютную меру (т.е. предельную движущую силу) и относительную меру для предельного ускорения автомобиля 1 согласно настоящему изобретению, также можно реализовать в компьютерной программе, которая, при выполнении на компьютере предписывает компьютеру применять способ. Компьютерная программа содержится на машиночитаемом носителе компьютерного программного продукта, каковой носитель содержит подходящую память, например ПЗУ (постоянную память), ППЗУ (программируемую постоянную память), СППЗУ (стираемое ППЗУ), флэш-память, ЭСППЗУ (электрически стираемое ППЗУ), жесткий диск и т.д.
Изобретение также относится к системе для определения первого параметра R F или второго параметра R Acc в соответствии с определением упомянутых параметров согласно любому из вышеописанных способов.
Система, отвечающая изобретению, содержит по меньшей мере один блок 110 управления, который схематически изображен на фиг. 8 и который сам может содержать вычислительный блок 111, который может принимать форму процессора или микрокомпьютера, по существу, любого пригодного типа, например, схемы для обработки цифровых сигналов (цифрового сигнального процессора, DSP), или схемы с заранее определенной конкретной функцией (специализированной интегральной схемы, APIC). Вычислительный блок 111 подключен к блоку 112 памяти, который встроен в блок 110 управления и откуда на вычислительный блок 111 поступает, например, сохраненный программный код и/или сохраненные данные, необходимые вычислительному блоку 111 для осуществления вычислений. Вычислительный блок 111 также выполнен с возможностью сохранения промежуточных или окончательных результатов вычислений в блоке 112 памяти.
Блок 110 управления также снабжен устройствами 113, 114, 115, 116 для приема входных сигналов и отправки выходных сигналов. Эти входные и выходные сигналы могут содержать колебательные сигналы, импульсы или другие атрибуты, которые устройства 115, 116 приема входного сигнала могут регистрировать как информацию и которые можно преобразовывать в сигналы, обрабатываемые вычислительным блоком 111. Затем эти сигналы поступают на вычислительный блок 111. Устройства 114, 115 отправки выходного сигнала выполнены с возможностью преобразования сигналов, принятых от вычислительного блока 111, например, путем их модуляции, для создания выходных сигналов, которые можно переносить на другие части системы управления автомобиля и/или компонент/компоненты, которым предназначены сигналы. Специалисту в данной области техники очевидно, что вышеупомянутый компьютер может принимать форму вычислительного блока 111 и что вышеупомянутая память может принимать форму блока 112 памяти.
Каждое из соединений с устройствами для приема и отправки входных и выходных сигналов может принимать форму одного или более из кабеля, шины данных, например шины CAN (контроллерной сети), шины MOST (бортовой оптоволоконной автомобильной шины) или некоторой другой конфигурации шины, или беспроводного соединения. Соединения 70, 80, 90, 100, показанные на фиг. 1, также могут принимать форму одного или более из этих кабелей, шин или беспроводных соединений.
Специалистам также очевидно, что систему, отвечающую изобретению, можно модифицировать согласно различным вариантам осуществления способа для определения первого параметра R F или второго параметра R Acc согласно изобретению.
Изобретение также относится к автомобилю 1, например пассажирскому автомобилю, грузовику или автобусу, который содержит по меньшей мере одну систему для определения первого параметра R F или второго параметра R Acc согласно изобретению.
Наконец, настоящее изобретение не ограничивается вышеописанными вариантами осуществления, но относится к и содержит все варианты осуществления изобретения в пределах объема защиты нижеследующих независимых пунктов.



Изобретение относится к определению предельной движущей силы автомобиля. Способ определения первого параметра, который представляет предельную движущую силу автомобиля, при этом первый параметр определяется на основании разности между первой движущей силой и второй движущей силой. Первая движущая сила является максимальной движущей силой, а вторая движущая сила является текущим сопротивлением движению для автомобиля. Способ дополнительно содержит определение второго параметра предельного ускорения автомобиля и заданного как отношение между первым параметром и нормирующим множителем. Система для определения первого параметра содержит блок управления, который определяет первый параметр на основании разности между первой движущей силой и второй движущей силой. Также изобретение относится к использованию первого параметра предельной движущей силы и/или второго параметра предельного ускорения автомобиля в качестве определения значения виртуальной педали акселератора, управления выбором передачи, выбором стратегии переключения передач, управления вспомогательным оборудованием. Достигается улучшение управления автомобилем. 5 н. и 11 з.п. ф-лы, 9 ил., 1 табл.
1. Способ определения первого параметра RF, который представляет предельную движущую силу автомобиля (1), снабженного трансмиссией, которая выполнена с возможностью обеспечивать различные передаточные числа для приведения в движение автомобиля (1) и которая содержит по меньшей мере один двигатель (10) и по меньшей мере одну коробку передач (20), отличающийся тем, что первый параметр RF определяется на основании разности между первой движущей силой FMax и второй движущей силой FDr, причем первая движущая сила FMax является максимальной движущей силой, доступной для автомобиля (1) при текущем передаточном числе, и вторая движущая сила FDr является текущим сопротивлением движению для автомобиля (1), при этом способ дополнительно содержит определение второго параметра RAcc, представляющего предельное ускорение автомобиля (1) и заданного как отношение между первым параметром RF и нормирующим множителем.
2. Способ по п.1, в котором первая движущая сила FMax является движущей силой, которая, через трансмиссию, приводит в движение автомобиль (1) в направлении его движения при текущем максимальном крутящем моменте двигателя, доступном для двигателя (10).
3. Способ по пп.1 или 2, в котором вторая движущая сила FDr является движущей силой, которая может принимать положительное или отрицательное значение и действует на автомобиль (1) в направлении движения последнего и которая зависит от одного или более параметров из сопротивления воздуха, сопротивления качению, трения в упомянутой трансмиссии, момента инерции, данных топографической карты, уклона дороги и массы упомянутого автомобиля (1).
4. Способ по пп.1 или 2, в котором
первая движущая сила FMax задается как FMax=EngTot×iTot, где EngTot обозначает максимальный крутящий момент двигателя, доступный для двигателя (10) при текущих оборотах двигателя, и iTоt обозначает текущее передаточное число для трансмиссии до ведущих колес включительно, с учетом радиуса колеса, и
вторая движущая сила FDr задается как FDr=FRf-m×a, где FRf обозначает текущую фактическую движущую силу для упомянутого двигателя (10), m - массу и a - ускорение для автомобиля (1).
5. Способ по п.3, в котором
первая движущая сила FMax задается как FMax=EngTot×iTot, где EngTot обозначает максимальный крутящий момент двигателя, доступный для двигателя (10) при текущих оборотах двигателя, и iTot обозначает текущее передаточное число для трансмиссии до ведущих колес включительно, с учетом радиуса колеса, и
вторая движущая сила FDr задается как FDr=FRf-m×a, где FRf обозначает текущую фактическую движущую силу для двигателя (10), m - массу и a - ускорение для автомобиля (1).
6. Способ по любому из пп.1, 2, 5, в котором первый параметр RF задается уравнением RF=FMax-FDr, причем автомобиль (1) испытывает избыток движущей силы, если RF>0, недостаток движущей силы, если RF<0 и находится в состоянии равновесия движущей силы, если RF=0.
7. Способ по п.3, в котором первый параметр RF задается уравнением RF=FMax-FDr, причем автомобиль (1) испытывает избыток движущей силы, если RF>0, недостаток движущей силы, если RF<0, и находится в состоянии равновесия движущей силы, если RF=0.
8. Способ по п.4, в котором первый параметр RF задается уравнением RF=FMax-FDr, причем автомобиль (1) испытывает избыток движущей силы, если RF>0, недостаток движущей силы, если RF<0, и находится в состоянии равновесия движущей силы, если RF=0.
9. Способ по п.1, в котором второй параметр RAcc определяется уравнением  , причем автомобиль (1) испытывает избыток ускорения, если RAcc>0, недостаток ускорения, если RAcc<0, и находится в состоянии равновесия ускорения, если RAcc=0.
, причем автомобиль (1) испытывает избыток ускорения, если RAcc>0, недостаток ускорения, если RAcc<0, и находится в состоянии равновесия ускорения, если RAcc=0.
10. Способ по п.9, в котором автомобиль (1) содержит по меньшей мере один блок управления (110), например электронный блок управления (ECU), выполненный с возможностью управления одной или более функциями автомобиля (1), причем первый параметр RF или второй параметр RAcc непрерывно определяются в режиме реального времени упомянутым блоком управления (110).
11. Способ по любому из пп.1-2, 5, 7-8, 10, в котором автомобиль (1) представляет собой любой из пассажирского автомобиля, автобуса или грузовика.
12. Блок управления автомобилем, конфигурированный для выполнения операций способа по п.1.
13. Система для определения первого параметра RF, который представляет предельную движущую силу автомобиля (1), причем система содержит по меньшей мере один блок управления (110), выполненный с возможностью управления одной или более функциями автомобиля (1), причем автомобиль (1) снабжен трансмиссией, которая выполнена с возможностью обеспечивать различные передаточные числа для приведения в движение автомобиля (1) и которая содержит по меньшей мере один двигатель (10) и по меньшей мере одну коробку передач (20), отличающаяся тем, что блок управления (110) выполнен с возможностью определения первого параметра RF на основании разности между первой движущей силой FMax и второй движущей силой FDr, причем упомянутая первая движущая сила FMax является максимальной движущей силой, доступной для упомянутого автомобиля (1) при текущем передаточном числе, и вторая движущая сила FDr является текущим сопротивлением движению для упомянутого автомобиля (1), при этом блок управления (110) дополнительно выполнен с возможностью определения второго параметра RAcc, представляющего предельное ускорение автомобиля (1) и заданного как отношение между первым параметром RF и нормирующим множителем.
14. Система по п.13, в котором второй параметр RAcc определяется уравнением  , причем автомобиль (1) испытывает избыток ускорения, если RAcc>0, недостаток ускорения, если RAcc<0, и находится в состоянии равновесия ускорения, если RAcc=0.
, причем автомобиль (1) испытывает избыток ускорения, если RAcc>0, недостаток ускорения, если RAcc<0, и находится в состоянии равновесия ускорения, если RAcc=0.
15. Автомобиль (1), например пассажирский автомобиль, грузовик или автобус, который содержит по меньшей мере одну систему по п.13 или 14.
16. Использование первого параметра RF, который представляет предельную движущую силу, и/или второго параметра RAcc, который представляет предельное ускорение автомобиля (1), причем первый параметр RF и второй параметр RAcc определяются по любому из предыдущих пунктов, причем первый параметр RF и упомянутый второй параметр RAcc используются в одном или более приложениях, связанных с одной или более функциями в автомобиле (1) из следующих: определение значения виртуальной педали акселератора, управление выбором передачи, выбор стратегии переключения передач, управление вспомогательным оборудованием, например компрессором, генератором и компрессором кондиционера, функция круиз-контроля и круиз-контроль и отображение подсказок для водителей.
| US 2004020283 A1, 05.02.2004 | |||
| JP 10122357 A, 15.05.1998 | |||
| US 6027425 A1, 22.02.2000 | |||
| JP 10299882 A, 13.11.1998 | |||
| US 5079705 A, 07.01.1992 | |||
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ УСИЛИЕМ ПЕРЕКЛЮЧЕНИЯ СКОРОСТЕЙ В АВТОМАТИЗИРОВАННОЙ МЕХАНИЧЕСКОЙ ТРАНСМИССИИ | 1994 |
|
RU2101199C1 |

