Область техники
Настоящее изобретение относится к системе управления коробкой передач. В частности, изобретение относится к системе согласно ограничительной части п.1 формулы изобретения. Изобретение относится также к способу, транспортному средству, компьютерной программе и компьютерному программному продукту.
Уровень техники
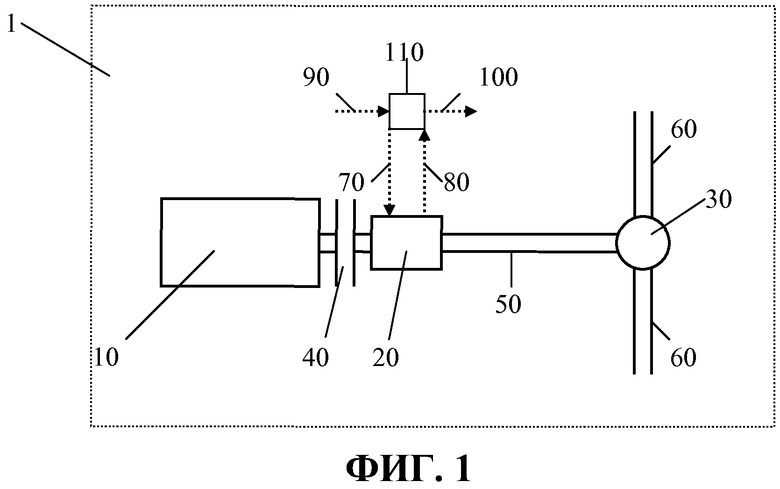
На фиг.1 схематично изображены части силовой передачи транспортного средства 1, такого как пассажирский автомобиль или тяжелое транспортное средство, например грузовик или автобус. Силовая передача содержит двигатель 10, механически присоединенный посредством вала к первому концу коробки 20 передач через сцепление 40. Коробка 20 передач также механически присоединена у ее другого конца посредством карданного вала 50 к дифференциалу 30, связанному с задним мостом. Задний мост содержит соответствующие левый и правый ведущие валы 60, которые приводят ведущие колеса транспортного средства (не изображенные на диаграмме).
В этом хорошо известном устройстве механическая работа двигателя 10 передается через различные устройства трансмиссии (например, сцепление 40, коробку 20 передач, карданный вал 50, дифференциал 30 и ведущий вал 60) на ведущие колеса для перемещения транспортного средства 1. Важным устройством в силовой передаче является коробка 20 передач, которая имеет некоторое количество передач переднего хода для перемещения транспортного средства 1 вперед и обычно одну или более передач заднего хода. Количество передач переднего хода изменяется, но современные типы грузовиков обычно предусмотрены с двенадцатью передачами переднего хода.
Коробка 20 передач может быть ручного или автоматического типа (автоматическая коробка передач), но также типа автоматической ручной коробки передач (автоматизированная механическая трансмиссия (АМТ)). Автоматические коробки передач и автоматические ручные коробки передач являются системами автоматизированных коробок передач, обычно управляемыми посредством управляющего блока 10 (электронный управляющий блок (ЭУБ)), который выполнен с возможностью управления коробкой 20 передач, например во время переключения передач, выбирая передачи на определенной скорости транспортного средства с определенным сопротивлением движению. ЭУБ может измерять частоту вращения двигателя и состояние коробки 20 передач и управлять коробкой передач посредством электромагнитных клапанов, присоединенных к пневматическим устройствам. Информация о двигателе 10, например, о его частоте вращения и вращающем моменте, также посылается от двигателя 10 к ЭУБ, например, через шину CAN (локальной сети контроллеров).
В обычных системах переключения передач управляющий блок 110 использует табулированные ограничения частоты вращения двигателя, также называемые точками переключения, которые представляют частоту вращения двигателя, на которой в коробке 20 передач должно быть осуществлено включение пониженной или повышенной передачи, то есть транспортное средство 1 переключает передачи, когда частота вращения его двигателя 10 проходит частоту вращения, представленную точкой переключения. Следовательно, точки переключения могут быть объяснены как предоставляющие информацию не только о том, когда должно происходить включение пониженной или повышенной передачи, но и о количестве шагов передачи, осуществляемых при каждом включении пониженной или повышенной передачи. Каждая точка переключения обычно содержит от одного до трех шагов передачи, но возможно больше шагов.
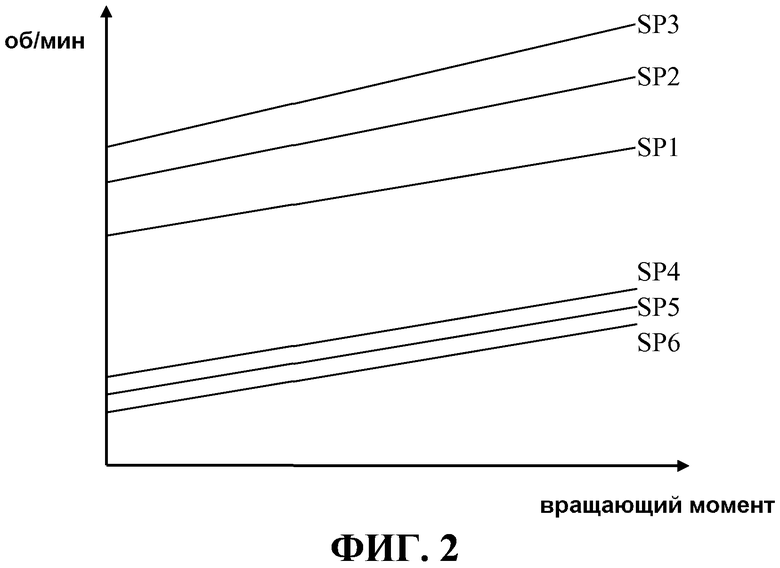
На фиг.2 схематично изображен пример различных табулированных точек переключения, представленных линиями SP1-SP6 на графике, на котором ось х представляет вращающий момент двигателя, и ось y представляет частоту вращения двигателя 10 в оборотах в минуту (об/мин). Пока частота вращения двигателя находится между линиями SP1 и SP4, переключение передач не происходит, но если она поднимается выше линии включения повышенной передачи, SP1-SP3, происходит включение повышенной передачи и, наоборот, происходит включение пониженной передачи, если частота вращения двигателя падает ниже линии включения пониженной передачи, SP4-SP6. В таблице 1 ниже показано несколько шагов вверх и вниз для каждой из линий SP1-SP6. Например, включение повышенной передачи за один шаг происходит, если частота вращения двигателя поднимается над линией SP1, и включение пониженной передачи за два шага происходит, если частота вращения двигателя падает ниже линии SP5.
Линии SP1-SP6 включения пониженной и повышенной передачи
Выборы точки переключения влияют, в частности, на характеристики движения, ускорение, комфорт и потребление топлива транспортного средства 1, так что точки включения должны быть аккуратно откалиброваны изготовителями транспортного средства. Эта калибровка касается различных стратегий переключения передач, испытываемых в полевых условиях в разных ситуациях вождения, например, с разными количествами прилагаемого ускорения, разными уклонами дороги и различными весами нагружения транспортного средства. Затем результаты испытаний тщательно анализируются для определения соответствующих точек переключения.
Автоматизированные системы переключения передач часто содержат так называемую функцию включения пониженной передачи, посредством которой задается включение пониженной передачи, если такая функция приведена в действие. Целью является быстрое увеличение частоты вращения двигателя 10, чтобы от него было получено больше мощности, но такое включение пониженной передачи может привести к тому, что после включения пониженной передачи частота вращения двигателя будет слишком большой, таким образом вызывая необходимость включения повышенной передачи. Это означает, что увеличивается количество нежелательных переключений передач, с последующим воздействием, в частности, на комфорт движения, потребление топлива и ускорение.
На фиг.3 изображен пример педали 2 акселератора в транспортном средстве 1, причем эта педаль может поворачиваться вокруг шпинделя для управления приложенным ускорением/вращающим моментом двигателя, как изображено пунктирными стрелками на чертеже. Педаль акселератора также содержит функцию включения пониженной передачи, которая в этом примере приводится в действие, если педаль 2 акселератора нажата в ее нижнее положение, так чтобы приводилась в действие нажимная кнопка или датчик 3, после чего система переключения передач получает указание, что должна быть приведена в действие функция включения пониженной передачи, например посредством электрического сигнала, посылаемого управляющему блоку 10.
Краткое описание изобретения
Задачей настоящего изобретения является предложение альтернативной системы управления коробкой передач. Другой задачей изобретения является предложение системы управления коробкой передач, которая полностью или частично решает проблемы предшествующего уровня техники. Дополнительной задачей изобретения является предложение функции включения пониженной передачи, которая уменьшает количество нежелательных переключений передач.
Согласно особенности изобретения, упомянутые выше задачи решаются системой управления коробкой передач, которая содержит, по меньшей мере, один управляющий блок, выполненный с возможностью управления коробкой передач в транспортном средстве, содержащем двигатель, присоединенный к коробке передач с возможностью приведения, причем система выполнена с возможностью ответа на получение указания посредством выбора для коробки передач передачи, которая является одной из различных возможных передач коробки передач и которая заставляет двигатель достигать желаемой частоты ωKD вращения за более короткое время, чем на любой другой передаче из различных возможных передач.
Варианты осуществления упомянутой выше системы описаны в зависимых пунктах прилагаемой формулы изобретения. Изобретение также относится к транспортному средству, содержащему, по меньшей мере, одну описанную выше систему.
Согласно другому аспекту изобретения, упомянутые выше задачи решены способом переключения передач в коробке передач транспортного средства, содержащего двигатель, присоединенный к коробке передач для ее приведения, причем способ обеспечивает возможность ответа на получение указания посредством выбора для коробки передач передачи, которая является одной из различных возможных передач коробки передач и которая заставляет двигатель достигать желаемой частоты ωKD вращения за более короткое время, чем на любой другой передаче из различных возможных передач.
Также изобретение относится к компьютерной программе, содержащей программный код, которая, когда программный код выполняется в компьютере, заставляет компьютер осуществлять описанный выше способ. Также изобретение относится к компьютерному программному продукту с компьютерной программой.
Способ согласно изобретению может быть также изменен согласно различным вариантам осуществления описанной выше системы.
Преимуществом изобретения является то, что приведение в действие функции включения пониженной передачи делает доступной максимальную мощность двигателя за минимально возможное время. Другим преимуществом является то, что нежелательные переключения передач уменьшены, когда используется функция включения пониженной передачи.
Дополнительные преимущества и применения устройства и системы согласно изобретению обозначены в подробном описании, приведенном ниже.
Краткое описание чертежей
В подробном описании настоящего изобретения, приведенном ниже, варианты осуществления изобретения описаны со ссылкой на прилагаемые чертежи, на которых:
фиг.1 - схематичный вид части силовой передачи для транспортного средства;
фиг.2 - график линий включения пониженной и повышенной передачи;
фиг.3 - схематичный вид педали акселератора, содержащей функцию включения пониженной передачи;
фиг.4 - блок-схема варианта осуществления изобретения; и
фиг.5 - управляющий блок, образующий часть системы согласно изобретению.
Подробное описание изобретения
Настоящее изобретение относится к системе управления коробкой 20 передач в транспортном средстве 1, например в грузовике или автобусе. Коробка 20 передач предпочтительно относится к типу, который образует часть автоматизированной системы переключения передач, управляемой управляющим блоком 110, например ЭУБ. В такой системе переключения передач осуществляются автоматически посредством управляющего блока 110, но также в такой системе обычно пользователь может выполнять ручные переключения передач, что известно как ручное переключение передач в автоматическом состоянии (автоматическом режиме). Коробка 20 передач также имеет множество передач, например, обычно в современных грузовиках имеется двенадцать передач переднего хода и одна или более передач заднего хода.
Для того чтобы полностью или частично исключить недостатки функций включения пониженной передачи согласно предшествующему уровню техники предложена система, которая содержит управляющий блок 101 для управления коробкой 20 передач, посредством которого для коробки 20 передач выбирается передача из различных возможных передач, когда включена функция включения пониженной передачи. Критерий выбора передачи заключается в том, что для коробки 20 передач выбирается та передача, на которой двигатель 10 достигает желаемой частоты ωKD вращения за более короткое время, чем на любой другой передаче из различных возможных передач.
Различными возможными передачами согласно варианту осуществления изобретения являются действующая передача, на которой работает коробка передач, или пониженная передача. Причина заключается в том, что когда приведена в действие функция включения пониженной передачи, желательной всегда является такая же или повышенная частота вращения двигателя. В случае, например, транспортного средства 1, который имеет двенадцать передач переднего хода и в данный момент работает на передаче 8, различными возможными передачами согласно этому варианту осуществления будут передачи 1-8, так что количество шагов передачи может лежать в диапазоне от 0 до 7 шагов вниз, что означает, что нулевое переключение передачи также является возможной альтернативой (то есть сохранение этой же передачи).
Желаемая частота ωKD вращения двигателя представляет желаемую частоту вращения двигателя 10. В этом контексте следует заметить, что желаемая частота ωKD вращения двигателя лежит в диапазоне частот вращения, который содержит максимально мощную частоту вращения двигателя 10, то есть частоту вращения, при которой мощность двигателя 10 является наибольшей. Причиной является то, что целью приведения в действие функции включения пониженной передачи является быстрое получение настолько большой мощности, насколько возможно. Следовательно, желаемая частота ωKD вращения согласно варианту осуществления изобретения находится в диапазоне, определенном как максимально мощная частота вращения двигателя 10 +/-Δω, где Δω представляет собой частоту вращения двигателя в об/мин. Степень увеличения Δω предпочтительно составляет 100-300 об/мин, но диапазон, определенный как максимально мощная частота вращения +/-Δω, не должен быть обязательно симметричным вокруг максимально мощной частоты вращения двигателя 10. Обычно желаемой является частота ωKD вращения двигателя, которая немного ниже максимально мощной частоты вращения двигателя 10.
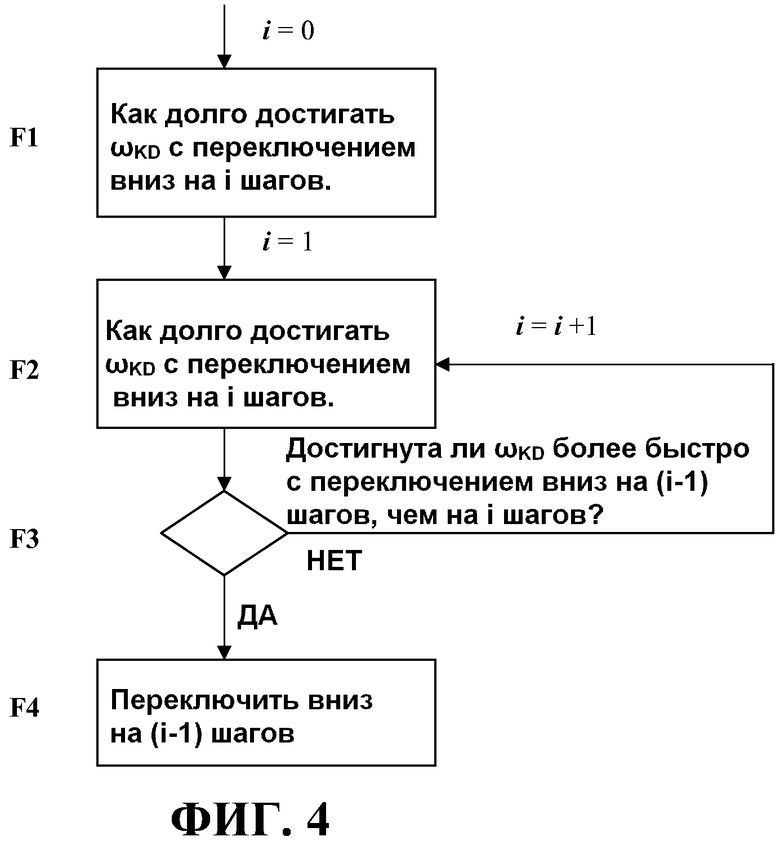
Как видно из блок-схемы на фиг.4, прямоугольник F1 рассчитывает, сколько времени требуется для ускорения до максимально мощной частоты ωKD вращения без включения пониженной передачи, то есть i=0, где i представляет количество шагов вниз от действующей передачи, когда включена функция включения пониженной передачи. За этим следует расчет в прямоугольнике F2, сколько времени требуется для достижения максимально мощной частоты ωKD вращения с одним шагом вниз, i=1. Затем эти два времени сравниваются. Если время достижения максимально мощной частоты ωKD вращения короче с i=0, чем с i=1, то система переключения передач выбирает не осуществлять какого-либо переключения передач. Иначе прямоугольник F3 рассчитывает время, требуемое для достижения максимально мощной частоты ωKD вращения с i шагов вниз и сравнивает его с временем, требуемым для максимально мощной частоты ωKD вращения с i-1 шагов. Этот процесс повторяется до тех пор, пока не будет достигнут шаг I вниз, который занимает больше времени, чем предыдущий шаг, то есть i-1, после чего прямоугольник F4 осуществляет i-1 шагов вниз.
Согласно варианту осуществления изобретения, время, требуемое для достижения максимально мощной частоты ωKD вращения, вычисляется с помощью уравнения
Тмакс.мощности=Тпереключения+Тускорения
где Тпереключения - время, которое требуется системе переключения передач для переключения от действующей передачи на одного из кандидатов передачи, которая наиболее быстро приведет двигатель к достижению максимально мощной частоты ωKD вращения, то есть передачи из различных возможных передач. Этот параметр известен системе переключения передач, так как он определяется системой. Если вычислено время для нулевого переключения передачи (то есть совсем никакого переключения передачи), этот термин очевидно равен 0. Тускорения - время, требуемое для ускорения транспортного средства 1 до максимально мощной частоты ωKD вращения после переключения передач. Тускорения может быть получено следующим образом.
Принимая отношения в уравнениях (1)-(3)


где М - ускоряющий вращающий момент, J - инерция транспортного средства, ω - частота вращения двигателя, Ме - вращающий момент маховика двигателя, Fres - сопротивление движению, r - радиус колес, i - общее передаточное число трансмиссии, m - вес транспортного средства и Ie - момент инерции двигателя; причем эти отношения выражены уравнением (4)
что в итоге означает, что
видно, что выбор передачи происходит в реальном времени посредством приведенных выше уравнений, то есть каждый раз, когда включается функция включения пониженной передачи. Расчеты предпочтительно выполняются в управляющем блоке, когда он получает указание на включение пониженной передачи, как описано выше.
Согласно другому варианту осуществления система содержит также управляющее средство 2, выполненное с возможностью обеспечения указания того, должна ли быть включена функция включения пониженной передачи. Управляющее средство 2 предпочтительно является педалью 2 акселератора, содержащей функцию включения пониженной передачи. Как видно из фиг.3, педаль 2 акселератора может принимать множество непрерывных положений между первым крайним положением (соответствующим отсутствию приложения ускорения) и вторым крайним положением (соответствующим приложению полного ускорения). Нажимание педали акселератора в ее второе крайнее положение приведет в действие, например, нажимную кнопку или датчик 3, ведущий к включению функции включения пониженной передачи системы. Например, электрический сигнал может быть послан от кнопки или датчика 3 к управляющему блоку 110 для использования в управлении коробкой 20 передач.
Изобретение относится также к транспортному средству 1, например грузовику или автобусу, содержащему, по меньшей мере, одну такую систему, как описанная выше.
Изобретение относится также к способу переключения передачи в коробке передач в транспортном средстве 1. Способ включает ответ на получение указания посредством выбора передачи из различных возможных передач, посредством чего двигатель 10 достигает желаемой частоты ωKD вращения за более короткое время, чем на любой другой передаче из различных возможных передач. Способ выполняет функции во всех сущностях согласно блок-схеме на фиг.4.
Также следует заметить, что способ и варианты осуществления способа могут быть изменены согласно различным вариантам осуществления системы управления коробкой передач согласно изобретению.
Специалистам в данной области техники также будет понятно, что способ переключения передачи в коробке передач согласно настоящему изобретению также может быть осуществлен в компьютерной программе, которая при выполнении в компьютере заставляет компьютер осуществлять способ. Компьютерная программа содержится в считываемом компьютером носителе компьютерного программного продукта, который принимает форму подходящей памяти, например постоянного запоминающего устройства (ПЗУ), программируемого постоянного запоминающего устройства (ППЗУ), стираемого ППЗУ (СППЗУ), флэш-памяти, электрически программируемого ПЗУ (ЭППЗУ), жесткого диска и так далее.
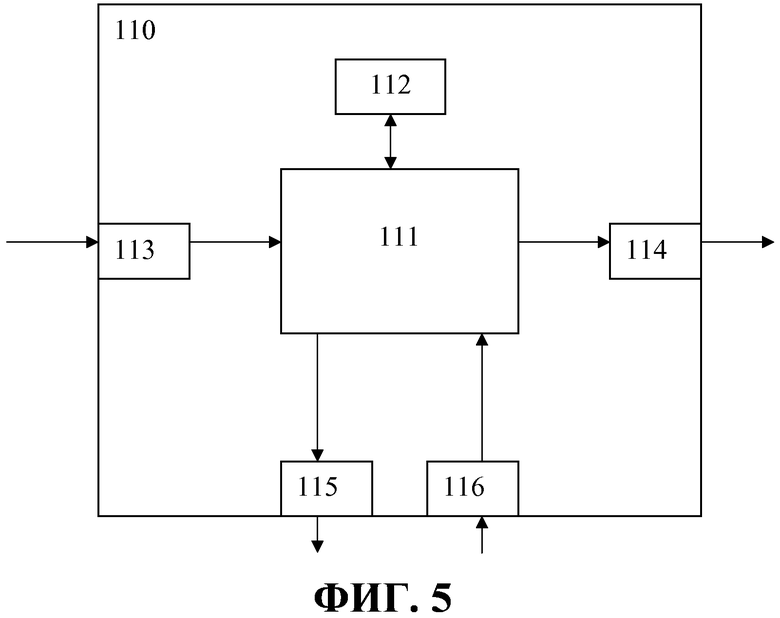
На фиг.5 схематично изображен управляющий блок 110, образующий часть системы согласно изобретению. Управляющий блок 110 содержит рассчитывающий блок 111, который может принимать форму, по существу, любого типа процессора или микропроцессора, например микросхемы для обработки цифрового сигнала (цифровой сигнальный процессор (DSP)) или микросхемы с заданной конкретной функцией (специализированная интегральная микросхема (ASIC)). Рассчитывающий блок 111 присоединен к блоку 112 памяти, который встроен в управляющий блок 110 и который предоставляет рассчитывающему блоку 111, например, хранимый код программы и/или хранимую информацию, которая требуется рассчитывающему блоку 111 для возможности осуществления расчетов. Рассчитывающий блок 111 также выполнен с возможностью хранения частичных или полных результатов расчетов в блоке 112 памяти.
Управляющий блок 110 дополнительно предусмотрен с устройствами 113, 114, 115, 116 для соответственного получения входных сигналов и посылания выходных сигналов. Эти входные и выходные сигналы могут содержать формы волны, импульсы и другие свойства, которые устройства 113, 116, получающие сигналы, могут определять как информацию и которые могут быть преобразованы в сигналы, обрабатываемые рассчитывающим блоком 111. Затем эти сигналы передаются в рассчитывающий блок 111. Устройства 114, 115, посылающие сигналы, выполнены с возможностью преобразования сигналов, полученных от рассчитывающего блока 111, для того чтобы создавать, например посредством модуляции сигналов, выходные сигналы, которые могут быть переданы к другим частям системы для определения точек включения пониженной передачи и включения повышенной передачи. Специалисту в данной области техники будет понятно, что упомянутый выше компьютер может принимать форму рассчитывающего блока 111 и что упомянутая выше память может принимать форму блока 112 памяти.
Каждое из соединений для соответствующих устройств для соответствующего получения входных сигналов и посылания выходных сигналов может принимать форму одного или более из следующих: кабель, шина данных, например шина CAN (локальной сети контроллеров), шина передачи данных мультимедийных систем (MOST), или некоторые другие конфигурации шины, или беспроводное соединение. Соединения 70, 80, 90, 100 на фиг.1 также могут принимать форму одного или более из этих кабелей, шин или беспроводных соединений.
Наконец, настоящее изобретение не ограничено его вариантами осуществления, описанными выше, и относится к объему защиты независимого пункта прилагаемой формулы изобретения и содержит в нем все варианты осуществления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЛИЧЕСТВ ШАГОВ ПЕРЕДАЧИ | 2010 |
|
RU2513094C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЛИЧЕСТВ ШАГОВ ПЕРЕДАЧИ | 2010 |
|
RU2509938C2 |
| СИСТЕМА УПРАВЛЕНИЯ КОРОБКОЙ ПЕРЕДАЧ | 2010 |
|
RU2518393C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТОЧКАМИ ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ | 2010 |
|
RU2528476C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОЧЕК ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ | 2010 |
|
RU2505725C2 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ СИЛОВОЙ ПЕРЕДАЧЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2488729C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРЕДЕЛЬНОЙ ДВИЖУЩЕЙ СИЛЫ АВТОМОБИЛЯ | 2010 |
|
RU2540361C2 |
| СПОСОБ УПРАВЛЕНИЯ КОРОБКОЙ ПЕРЕДАЧ | 2010 |
|
RU2514969C2 |
| СПОСОБ УПРАВЛЕНИЯ КОРОБКОЙ ПЕРЕДАЧ | 2010 |
|
RU2514623C2 |
| СПОСОБ ДЛЯ УПРАВЛЕНИЯ КОРОБКОЙ ПЕРЕДАЧ | 2010 |
|
RU2514627C2 |
Изобретение относится к системе управления коробкой передач. Система управления содержит один управляющий блок, выполненный с возможностью управления коробкой передач на транспортном средстве, содержащем двигатель, присоединенный к коробке передач с возможностью приведения. Система выполнена с возможностью ответа на получение указания посредством выбора для коробки передач передачи, которая является одной из различных возможных передач коробки передач и которая заставляет двигатель достигать желаемой частоты ωKD вращения за более короткое время, чем на любой другой передаче из различных возможных передач. Изобретение относится также к способу и транспортному средству, содержащему данную систему управления коробкой. Достигается повышение надежности устройства. 3 н. и 11 з.п. ф-лы, 5 ил. 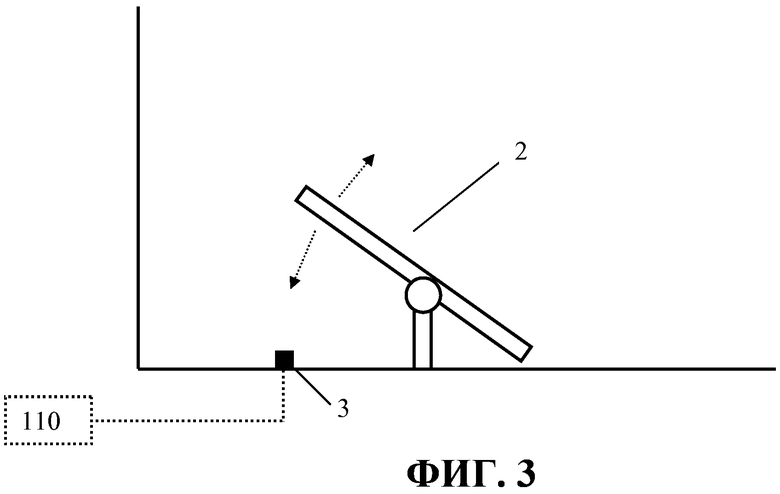
1. Система управления коробкой (20) передач, содержащая, по меньшей мере, один управляющий блок (110), выполненный с возможностью управления коробкой (20) передач на транспортном средстве (1), содержащем двигатель (10), присоединенный к коробке (20) передач с возможностью приведения, отличающаяся тем, что она выполнена с возможностью ответа на получение указания посредством выбора для коробки (20) передач передачи, которая является одной из различных возможных передач коробки (20) передач и которая заставляет двигатель (10) достигать желаемой частоты ωKD вращения за более короткое время, чем на любой другой передаче из различных возможных передач.
2. Система по п.1, отличающаяся тем, что она дополнительно содержит управляющее средство (2), присоединенное к системе, причем управляющее средство (2) выполнено с возможностью предоставления упомянутого указания.
3. Система по п.2, отличающаяся тем, что управляющее средство (2) представляет собой педаль акселератора, содержащую функцию включения пониженной передачи, посредством этого производя обозначение.
4. Система по любому из пп.1-3, отличающаяся тем, что желаемая частота ωKD вращения двигателя находится в диапазоне частоты вращения двигателя, который содержит максимально мощную частоту вращения двигателя (10).
5. Система по п.4, отличающаяся тем, что диапазон частоты вращения двигателя определяется как максимально мощная частота вращения двигателя (10) +/-Δω, где Δω - величина частоты вращения двигателя в порядке 100-300 об/мин.
6. Система по любому из пп.1-3, отличающаяся тем, что передача является действующей передачей или пониженной передачей.
7. Система по любому из пп.1-3, отличающаяся тем, что передача выбрана на основании расчетов в реальном времени.
8. Система по любому из пп.1-3, отличающаяся тем, что передача сводит к минимуму функцию времени
Тмакс.мощности=Тпереключения+Тускорения,
где Тпереключения - время, необходимое для осуществления переключения передач, а Тускорения - время, требуемое для ускорения упомянутого транспортного средства (1) до максимально мощной частоты вращения после переключения передач.
9. Система по п.8, отличающаяся тем, что Тускорения определяется как
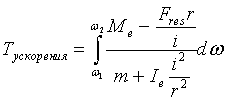
где Ме - вращающий момент маховика упомянутого двигателя (10), Ie - момент инерции упомянутого двигателя (10) и Fres, r, i и m - соответственно сопротивление движению, радиус колеса, общее передаточное число и вес транспортного средства (1).
10. Система по любому из пп.1-3, отличающаяся тем, что указание является электрическим управляющим сигналом.
11. Система по любому из пп.1-3, отличающаяся тем, что коробка (20) передач является автоматической коробкой передач или автоматизированной ручной коробкой передач, содержащей множество передач, а транспортное средство (1) является грузовиком или автобусом.
12. Система по любому из пп.1-3, отличающаяся тем, что различные возможные передачи представляют собой действующую передачу и другие пониженные передачи для упомянутой коробки (20) передач.
13. Транспортное средство (1), например грузовик или автобус, отличающееся тем, что оно содержит, по меньшей мере, одну систему по любому из пп.1-12.
14. Способ переключения передач в коробке (20) передач транспортного средства (1), содержащего двигатель (10), присоединенный к коробке (20) передач с возможностью приведения, отличающийся тем, что обеспечивают ответ на получение указания посредством выбора для коробки (20) передач передачи, которая является одной из различных возможных передач коробки (20) передач и которая заставляет двигатель (10) достигать желаемой частоты ωKD вращения за более короткое время, чем на любой другой передаче из различных возможных передач.
| Устройство для реактансной защиты | 1939 |
|
SU63591A1 |
| DE 10321519 A1, 02.12.2004 | |||
| ПРИВОДНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2080266C1 |
| US 2002086768 A1, 04.07.2002 | |||

