Настоящее изобретение относится к устройству для определения частоты вращения электрической машины с двумя частями, вторая из которых подвижна относительно первой части, имеющему датчик магнитного поля. Датчик магнитного поля закреплен на первой части электрической машины и предназначен для формирования и выдачи электрической величины, характеризующей параметр регистрируемого магнитного поля. Формируемая датчиком магнитного поля электрическая величина подается в устройство обработки данных, которое на основании этой электрической величины определяет зависящую от частоты вращения и/или от скорости величину относительного движения между первой и второй частями электрической машины.
Настоящее изобретение относится также к способу определения зависящей от частоты вращения или от скорости величины. Такой способ заключается в том, что с помощью датчика магнитного поля, который закреплен на первой части электрической машины, вторая часть которой подвижна относительно ее первой части, регистрируют магнитное поле, с помощью датчика магнитного поля формируют электрическую величину, характеризующую параметр регистрируемого магнитного поля, и с учетом сформированной датчиком магнитного поля электрической величины определяют зависящую от частоты вращения, соответственно от скорости, величину относительного движения между первой и второй частями электрической машины. Зависящая от частоты вращения величина может также представлять собой саму частоту вращения, информация о которой необходима, например, для распознавания резкого возрастания сопротивления вращению инструмента (обратного удара) в электрической ручной машине или для регулирования частоты вращения.
Недостаток используемых в настоящее время, традиционных устройств для определения частоты вращения электрической машины состоит в том, что необходимо использовать либо по меньшей мере один компонент датчика частоты вращения, например тахометрический диск, вращающийся вместе со второй частью электрической машины, либо датчик, через который протекает активный ток электрической машины, как это известно из DE 4133269 А1. Поэтому в традиционных устройствах реализация их функции по определению частоты вращения связана с высокими затратами.
В основу настоящего изобретения была положена задача предложить устройство, которое позволяло бы реализовать функцию по определению частоты вращения с меньшими затратами. Задача изобретения состояла также в том, чтобы разработать обладающий подобным преимуществом способ.
Указанные задачи решаются с помощью объектов, заявленных в независимых пунктах формулы изобретения. Различные предпочтительные варианты осуществления изобретения представлены в зависимых пунктах формулы изобретения.
В отношении устройства указанного в начале описания типа поставленная в изобретении задача решается благодаря тому, что датчик магнитного поля предназначен для регистрации исходящего от второй части электрической машины магнитного поля.
В одном из предпочтительных вариантов выполнения предлагаемого в изобретении устройства оно имеет также устройство обработки данных.
В еще одном предпочтительном варианте выполнения предлагаемого в изобретении устройства первая часть электрической машины представляет собой ее статор, а вторая часть электрической машины представляет собой ее ротор.
В следующем предпочтительном варианте выполнения предлагаемого в изобретении устройства вторая часть электрической машины не имеет постоянного магнита для создания магнитного поля, регистрируемого датчиком магнитного поля.
В еще одном, также предпочтительном варианте выполнения предлагаемого в изобретении устройства датчик магнитного поля закреплен на корпусной детали электродвигателя.
В другом возможном варианте выполнения предлагаемого в изобретении устройства датчик магнитного поля залит в корпусную деталь.
В следующем предпочтительном варианте выполнения предлагаемого в изобретении устройства устройство обработки данных предназначено для определения частоты вращения или увеличения частоты вращения.
Устройство обработки данных может быть также предназначено для отображения частоты вращения и/или увеличения частоты вращения.
В отношении способа указанного в начале описания типа поставленная в изобретении задача решается благодаря тому, что датчиком магнитного поля регистрируют магнитное поле, исходящее от второй части электрической машины.
Ниже изобретение более подробно рассмотрено на примере особенно предпочтительных вариантов его осуществления со ссылкой на прилагаемые к описанию графические материалы, на которых показано:
на фиг.1 - схематичный общий вид в аксонометрии предлагаемого в изобретении устройства, выполненного по одному из вариантов,
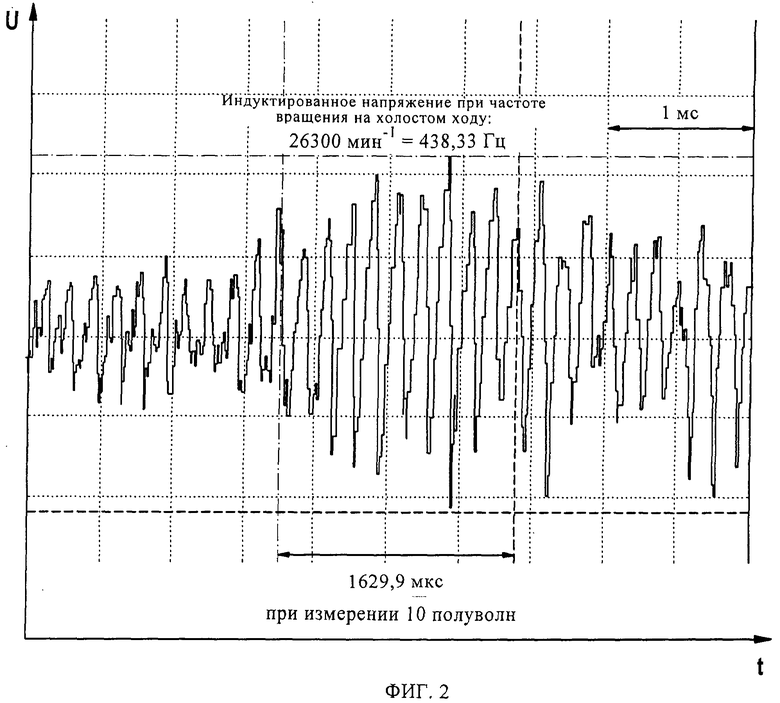
на фиг.2 - полученная с помощью осциллографа временная диаграмма напряжения, индуцируемого в датчике магнитного поля при частоте вращения на холостом ходу, равной 26300 об/мин, и
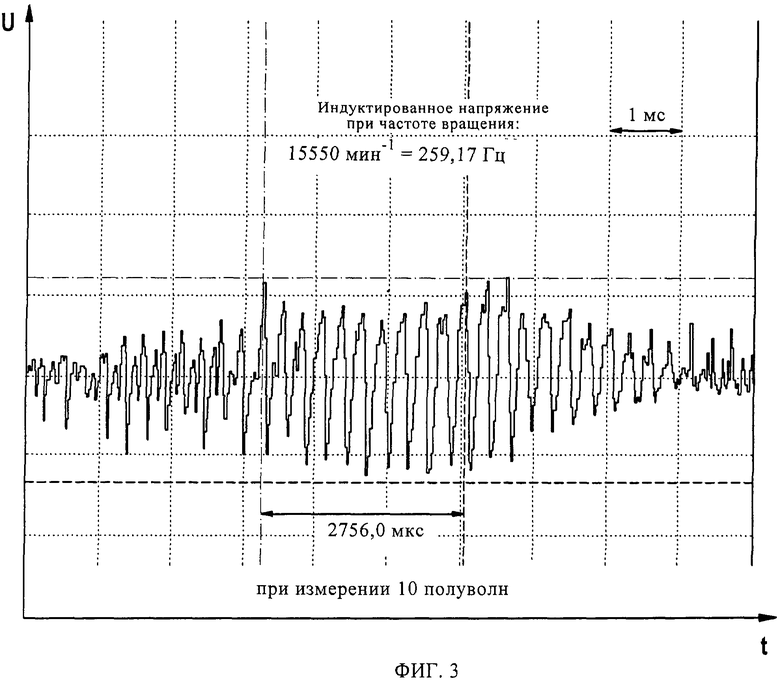
на фиг.3 - полученная с помощью осциллографа временная диаграмма напряжения, индуцируемого в датчике магнитного поля при рабочей частоте вращения, равной 15500 об/мин.
На фиг.1 схематично показана электрическая машина 10, имеющая неподвижную часть 12, называемую также статором 12, и подвижную относительно статора часть 14, называемую также ротором 14. Примером электрической машины является электродвигатель, который служит для преобразования электрической энергии от ее (не показанного на чертеже) источника в механическую энергию, прежде всего в энергию вращения. Электрическая машина 10 подобного типа представляет собой, например, универсальный электродвигатель 10 последовательного возбуждения. Альтернативно этому или дополнительно к этому электрическая машина 10 может представлять собой электромашинный генератор 10 тока, т.е. может быть предназначена для преобразования механической энергии в электрическую энергию для ее потребления или накопления. Ротор 14 электрической машины обычно имеет в основном осесимметричную конструкцию и обычно имеет четное количество якорных сегментов. Электрическая машина 10 может иметь корпус 16. Статор 12 и корпус 16 обычно механически прочно соединены между собой. Ротор 14 имеет вал 18, который через по меньшей мере один подшипник 20 опирается на статор 12 или корпус 16. Ротор 14 имеет (частично показанную на чертеже) якорную обмотку 22, а статор 12 имеет (частично показанную на чертеже) статорную обмотку 24. При работе электрической машины 10 по якорной обмотке 22 протекает электрический ток. При этом возникает магнитное поле, воображаемые силовые линии 26 которого выходят из поверхности ротора 28 и входят в части статора 12. На статоре 12, и/или корпусе 16, и/или вне корпуса 16 закреплен датчик 30 магнитного поля (например, датчик Холла или катушка индуктивности), пронизываемый обычно менее 3% этих силовых линий 26 магнитного поля. Эта часть магнитного поля ниже обозначается как "пронизывающее поле". В определенный момент времени пронизывающее датчик 30 магнитного поля поле, соответственно описывающие его силовые линии, обладает/обладают определенными характеристиками, такими как напряженность, пространственное распределение направлений и/или скорость изменения во времени. Согласно изобретению датчик 30 магнитного поля регистрирует по меньшей мере одну из указанных величин пронизывающего его поля и формирует в ответ на это электрическую величину 31, которая описывает по меньшей мере одну из трех указанных характеристик пронизывающего поля.
Ниже для более наглядного пояснения изобретения сначала рассматривается составляющая пронизывающего поля, формируемая якорной обмоткой 22 универсального двигателя 10, работающего от напряжения постоянного тока. При этом по обмотке 24 возбуждения, т.е. по статорной обмотке 24, протекает постоянный ток. Вследствие прохождения постоянного тока по обмотке 24 возбуждения создаваемое ею и воздействующее тем самым на якорь 14 поле постоянно во времени в системе координат, связанной со статором 12. Если рассматривать только одну пару полюсов, то силовые линии поля, создаваемого обмоткой 24 возбуждения, проходят от северного полюса статора 12 в направлении к его южному полюсу. В этом случае и в цепи тока якоря, состоящей из якорной обмотки 22 и из последовательно включенного с ней с входной и выходной сторон переключателя полярности (состоящего из коллекторных пластин и щеток), протекает постоянный ток. Создаваемое якорной обмоткой 22 магнитное поле 26 в течение периода времени между двумя непосредственно следующими друг за другом процессами переключения полярности также в основном постоянно, а именно: в системе координат, связанной с ротором 14. При каждом же процессе переключения полярности направление создаваемого якорной обмоткой 22 магнитного поля 26 в системе координат, связанной с ротором 14, изменяется на обратное. Переключатель полярности предназначен для переключения полярности якорной обмотки 22 синхронно с вращением 32 якоря 14, создаваемое обмоткой 22 которого магнитное поле 26 в системе координат, связанной со статором 12, тем самым в основном всегда ориентировано в одном и том же направлении, в результате чего направление вращающего ротор 14 момента остается неизменным. Обычно переключение полярности происходит в тот момент, когда провода 34 якорной обмотки 22 находятся в нейтральной зоне между полюсами обмотки 24 возбуждения, т.е. наличие тока в цепи якоря в основном не требуется и/или нежелательно. Магнитное поле 26 создается якорной обмоткой 22 обычно в то время, когда ее провода 34 находятся в зоне полюсов обмотки 24 возбуждения. В соответствии с этим при нахождении вблизи северного полюса обмотки 24 возбуждения ток в цепи якоря протекает по проводам 34 якорной обмотки 22 в первом, обычно осепараллельном направлении. При нахождении же вблизи южного полюса обмотки 24 возбуждения ток в цепи якоря протекает по проводам 34 якорной обмотки 22 во втором направлении, которое параллельно, но противоположно первому направлению. Якорная обмотка 22 представляет собой, таким образом, катушку, которая при протекании через нее тока (т.е. в период между двумя непосредственно следующими друг за другом процессами переключения полярности) создает магнитное поле 26, которое направлено в основном перпендикулярно оси 36 вращения и поперечно направлению между северным и южным полюсами обмотки 24 возбуждения. Учитывая рассмотренные выше выкладки, датчик 30 магнитного поля предпочтительно располагать вблизи так называемой нейтральной зоны между двумя полюсами, чтобы он мог регистрировать создаваемое якорным током магнитное поле 26 в том месте, где оно имеет наибольшую напряженность. С другой стороны, следует исходить из того, что наличие у статора 12 меньшего магнитного сопротивления может эффективно использоваться и для создаваемых якорной обмоткой 12 силовых линий 26. Рассматривая оба этих соображения в совокупности, наиболее целесообразным представляется размещение датчика магнитного поля 30 на полюсе обмотки 24 возбуждения, а предпочтительно - на крае полюса, если смотреть в тангенциальном или окружном направлении 38. Во избежание снижения эффективности датчика 30 магнитного поля вследствие реакции якоря из-за насыщения на крае полюсного наконечника обмотки 24 возбуждения датчик 30 магнитного поля наиболее предпочтительно располагать с той стороны полюсного наконечника, с которой магнитное поле 26 якоря накладывается на создаваемое обмоткой 24 возбуждения поле, не усиливая, а ослабляя его, прежде всего под нагрузкой. По рассмотренным выше причинам создаваемое якорной обмоткой 22 магнитное поле 26 именно благодаря полюсному переключателю несмотря на вращение 32 ротора 14 в общем и целом сохраняет свое направление и поэтому при рассматриваемой в данном случае работе на постоянном токе имеет постоянную составляющую. Несмотря на это напряженность такого магнитного поля снижается до нуля при каждом процессе переключения полярности. При использовании дросселя в качестве датчика 30 магнитного поля постоянная составляющая магнитного поля 26 не регистрируется им. Время существования магнитного поля 26 соответствует промежутку времени между двумя последовательными процессами переключения полярности. В результате переключения полярности создаваемое датчиком 30 магнитного поля индуктированное напряжение, изменяющееся по синусоидальному закону, имеет частоту, которая из расчета на пару полюсов вдвое превышает частоту вращения ротора 14. Если принять определенное направление 40 вписанного угла за линию отсчета, то при каждом прохождении коллекторной пластины мимо этого направления 40 вписанного угла завершается одно полное колебание. Формируемое датчиком 30 магнитного поля напряжение, таким образом, пропорционально определяемой в конечном итоге частоте вращения ротора 14 и количеству пар полюсов.
Пронизывающее (датчик 30 магнитного поля) поле может определяться другими влияющими факторами. При протекании между щеточными выводами якорной обмотки 22 не постоянного, а переменного тока (как, например, в случае работающего от сети переменного тока универсального электродвигателя 10 последовательного возбуждения) в сказанном выше принципиально ничего не меняется. Обусловлено это тем, что происходящее в результате перемены полярности напряжения питающей сети изменение направления тока на обратное затрагивает обмотку 24 возбуждения точно так же, как и цепь тока якоря (в которую входит переключатель полярности). Поскольку направление тока изменяется на обратное одновременно и в обмотке 24 возбуждения, и в цепи якоря (что, кстати, не имеет никакого отношения к описанному выше переключению полярности ее переключателем), направление вращающего момента электрической машины 10 не изменяется при переходе от положительной к отрицательной полуволне напряжения питающей сети и наоборот. Однако при переходе напряжения питающей сети через нуль происходит дополнительный фазовый сдвиг (перемена полярности) магнитного поля, воздействующего на якорную обмотку 22 в зоне датчика 30 магнитного поля. Поскольку подобный фазовый сдвиг происходит при переходе напряжения питающей сети через нуль, в поступающем в логическое устройство 42 обработки данных сигнале напряжения, выдаваемом датчиком 30 магнитного поля, отсутствует дополнительный фронт, который мог бы привести к ошибке измерения. Однако и без этого обработку измерительного сигнала целесообразно проводить только в тех частях (временных интервалах) положительных и/или отрицательных полуволн напряжения питающей сети, в которых оно имеет достаточный для обработки уровень. Обусловлено это тем, что формируемый датчиком 30 магнитного поля пропорциональный частоте вращения сигнал представляет собой биения, огибающая которых имеет такую же синусоидальную форму, что и напряжение питающей сети (в данном случае с частотой 50 Гц).
Согласно изобретению формируемая датчиком 30 магнитного поля электрическая величина 31 передается в устройство 42 обработки данных. С учетом этой входной электрической величины 31 устройство 42 обработки данных на основании ее определяет зависящую от частоты вращения и/или скорости величину относительного движения между ротором 14 и статором 12. Для этого устройство 42 обработки данных может иметь устройство квантования сигнала для выдаваемой датчиком 30 магнитного поля электрической величины 31, а также может иметь функции фильтрации для временной области и/или частотной области. Подобные функциональные возможности устройства 42 обработки данных можно реализовать на аппаратном уровне с использованием аналоговой и/или цифровой схемотехники и/или на программном уровне с использованием микропроцессора или процессора обработки сигнала. Устройство 42 обработки данных может также обрабатывать совокупность указанных величин.
На фиг.2 показана временная диаграмма, отражающая биения индуктированного напряжения, частота которого складывается в основном из частоты сети, равной 50 Гц, и частоты примерно 6135 Гц, с которой якорные сегменты ротора 14 проходят мимо датчика 30 магнитного поля. Эта частота, с которой якорные сегменты проходят мимо датчика 30 магнитного поля, ниже обозначается как "частота якорных сегментов". Соответствующий ей "период якорных сегментов" длится 0,163 мс. При частоте вращения 26300 об/мин длительность одного оборота составляет примерно 2,28 мс. Причина того, что длительность одного оборота в 14 раз превышает "период якорных сегментов", заключается в том, что за один оборот якоря 14 перемена полярности в данном случае происходит не дважды (как в простейшем случае), а в 7×2 раз чаще. Таким образом, количество пар полюсов в данном случае равно 7.
На фиг.3 показана временная диаграмма напряжения при в остальном тех же исходных условиях, что и на фиг.2, но при рабочей частоте вращения 15550 об/мин, т.е. при частоте, составляющей 59,1% от скорости вращения на холостом ходу. Указанная временная диаграмма отражает биения индуктированного напряжения, частота которого складывается в основном из частоты сети, равной 50 Гц, и частоты якорных сегментов, равной примерно 3628 Гц. Эта частота якорных сегментов составляет 59,1% от частоты якорных сегментов, измеренной при частоте вращения на холостом ходу. Во временной области рабочую частоту вращения электрической машины можно по меньшей мере приблизительно определять, измеряя время между соседними характеристическими точками на измеряемой характеристике изменения напряжения во времени. За такие характеристические точки на измеряемой характеристике изменения напряжения во времени можно принять, например, точки перехода через нуль, точки перегиба, максимумы или минимумы на характеристике изменения напряжения во времени. Долю возможной погрешности измерения обычно можно уменьшить, измеряя время не только между двумя непосредственно соседними характеристическими точками, но и между каждой n-й точкой. В проиллюстрированном на фиг.2 и 3 примере измеряли, в частности, время между каждой 10-й характеристической точкой. И наоборот, можно также в течение заданного интервала времени, например в течение 5 мс, подсчитывать количество характеристических точек и определять частоту якорных сегментов, деля количества подсчитанных характеристических точек на длительность этого заданного интервала времени. Учитывая, что путем фильтрации в частотной области, т.е. через частотный фильтр, частоты начиная примерно с 150 Гц можно при низких затратах на фильтры надежно отличать от частотных составляющих сети, предлагаемый в изобретении способ позволяет в рассматриваемом примере достоверно определять частоту вращения в интервале от примерно 643 до 26300 об/мин. При частоте вращения ниже 643 об/мин (соответствует 10,72 Гц) становится сложнее отличать частотные составляющие сети, кратные частоте сети, равной 50 Гц, от частоты якорных сегментов. Для возможности определения еще более низких частот вращения можно увеличить количество пар полюсов.
Соответствующий вариант с соответствующими функциональными возможностями можно также реализовать и применительно к линейному электродвигателю, соответственно линейному генератору.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРИЧЕСКАЯ МАШИНА ПОСТОЯННОГО ТОКА | 1991 |
|
RU2016470C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА ПЕРЕМЕННОГО ТОКА | 1996 |
|
RU2096896C1 |
| Способ запуска газотурбинного двигателя | 2018 |
|
RU2680287C1 |
| Электрическая машина с возбуждением от постоянных магнитов | 1987 |
|
SU1495940A1 |
| ФОТОЭЛЕКТРИЧЕСКИЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2022 |
|
RU2799810C1 |
| МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА СО СПЕЦИАЛЬНЫМ ВОЗБУДИТЕЛЕМ | 2009 |
|
RU2418353C2 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1992 |
|
RU2079952C1 |
| Сверхпроводниковая индукторная электрическая машина с комбинированным возбуждением | 2018 |
|
RU2696090C2 |
| Якорь многофазной электрической машины | 2018 |
|
RU2684898C1 |
| Электромашинный генератор импульсов | 1981 |
|
SU997192A1 |
Изобретение относится к области электротехники. Заявлено устройство (11), имеющее датчик (30) магнитного поля и электрическую машину (10) с двумя подвижными относительно друг друга частями (12, 14). Датчик (30) магнитного поля, предназначенный для регистрации исходящего от второй части (14) электрической машины магнитного поля (26) и для формирования и выдачи электрической величины (31), характеризующей параметр регистрируемого магнитного поля (26), закреплен при этом на первой части (12) электрической машины. Формируемая датчиком магнитного поля электрическая величина (31) подается в устройство (42) обработки, которое на основании этой электрической величины (31) определяет зависящую от частоты вращения и/или от скорости величину относительного движения (32) между первой (12) и второй (14) частями электрической машины. В заявке описан также способ определения зависящей от частоты вращения или от скорости величины, заключающийся в том, что с помощью датчика (30) магнитного поля регистрируют исходящее от второй части (14) электрической машины (10) магнитное поле (26). Датчик (30) магнитного поля формирует электрическую величину (31), характеризующую параметр регистрируемого магнитного поля (26). С учетом этой электрической величины (31) определяют зависящую от частоты вращения, соответственно от скорости, величину относительного движения (32) между обеими частями (12, 14) электрической машины (10). Технический результат - возможность определения частоты вращения без использования датчика частоты вращения. 2 н. и 7 з.п. ф-лы, 3 ил.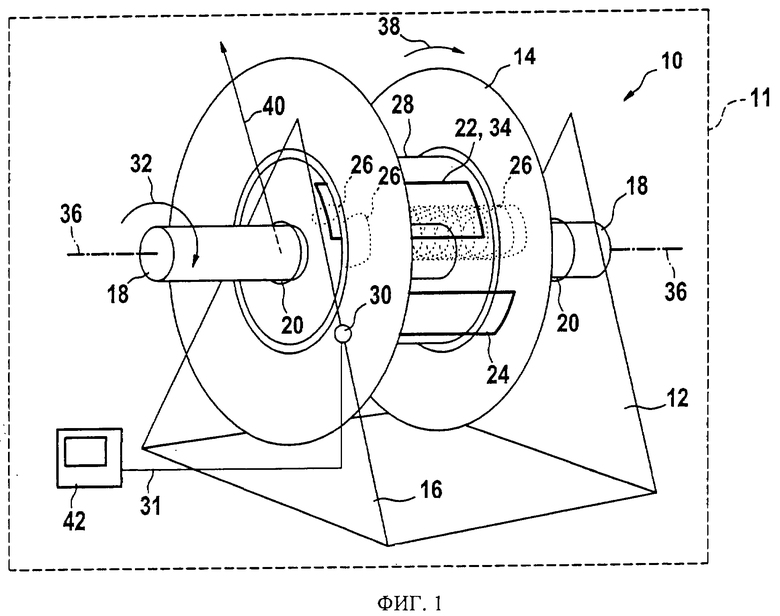
1. Устройство (11) для определения частоты вращения электрической машины (10) с двумя частями (12, 14), вторая (14) из которых подвижна относительно первой части (12), имеющее датчик (30) магнитного поля, закрепленный предпочтительно на первой части (12) электрической машины и предназначенный для регистрации исходящего от второй части (14) электрической машины магнитного поля (26) и для формирования и выдачи электрической величины (31), характеризующей параметр регистрируемого магнитного поля (26) и подаваемой в устройство (42) обработки данных, которое на основании этой электрической величины (31) определяет зависящую от частоты вращения и/или от скорости величину относительного движения (32) между первой (12) и второй (14) частями электрической машины.
2. Устройство (11) по п.1, которое имеет также устройство (42) обработки данных.
3. Устройство (11) по п.1, в котором первая часть (12) электрической машины (10) представляет собой ее статор (12), а вторая часть (14) электрической машины (10) представляет собой ее ротор (14).
4. Устройство (11) по п.1, в котором вторая часть (14) электрической машины не имеет постоянного магнита для создания магнитного поля (26), регистрируемого датчиком (30) магнитного поля.
5. Устройство (11) по п.1, в котором датчик (30) магнитного поля закреплен на корпусной детали (16) электродвигателя (10).
6. Устройство (11) по п.5, в котором датчик (30) магнитного поля залит в корпусную деталь (16).
7. Устройство (11) по п.1, в котором устройство (42) обработки данных предназначено для определения частоты вращения или увеличения частоты вращения.
8. Устройство (11) по п.7, в котором устройство (42) обработки данных предназначено также для отображения частоты вращения и/или увеличения частоты вращения.
9. Способ определения зависящей от частоты вращения или от скорости величины, заключающийся в том, что с помощью датчика (30) магнитного поля, который закреплен на первой части (12) электрической машины (10), вторая часть (14) которой подвижна относительно ее первой части (12), регистрируют исходящее от второй части (14) электрической машины (10) магнитное поле (26), с помощью датчика (30) магнитного поля формируют электрическую величину (31), характеризующую параметр регистрируемого магнитного поля (26), и с учетом сформированной датчиком (30) магнитного поля электрической величины (31) определяют зависящую от частоты вращения, соответственно от скорости, величину относительного движения (32) между первой (12) и второй (14) частями электрической машины.
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ МАШИНЫ ПОСТОЯННОГО ТОКА | 2005 |
|
RU2281525C1 |
| Устройство для измерения магнитного потока в асинхронных машинах | 1974 |
|
SU515078A1 |
| ГЛАЗУРЬ | 2006 |
|
RU2329965C1 |

