1. Область техники
Изобретение относится к области разработки тренажеров, предназначенных для повышения эффективности ударов в восточных единоборствах, в частности при подготовке единоборцев к испытаниям или соревнованиям по раскалыванию твердых предметов руками или ногами (тест «тамэсивари»).
2. Уровень техники
Известно множество приспособлений и устройств, предназначенных для отработки и повышения эффективности ударов - лапы, закрепляемые на руках, подушки, фиксируемые на стене или стойках, тренировочные мешки (Лялько В. Тренажеры в боевых искусствах. Под. Ред А.Е. Тараса. Минск: изд. «Хорвест», 1998, с.177-210).
Эти устройства, как правило, имеют неизменную жесткость, поэтому характер (диаграмма) зависимости ударной нагрузки от деформации (смещения) устройства в зоне контакта с ударной конечностью имеет один и тот же вид (прямая линия или близкая к ней дуга). При варьировании кинетической энергии ударной конечности начальный угол наклона диаграммы сохраняется, меняется лишь амплитуда ударной нагрузки.
Известен спортивный тренажер для отработки техники нанесения ударов «камертон Шилова», принятый заявителем за наиболее близкий аналог как в части устройства, так и в части способа, реализуемого этим устройством (патент на полезную модель RU №95534 от 10.07.2010).
Известный способ включает операции регулирования уровня жесткости рабочей части тренажера, нанесение удара по приемнику ударов, преобразование энергии удара в упругую деформацию рабочей части.
Известное устройство содержит основание, приемник ударов, соединенный с упругой рабочей частью, регулятор жесткости рабочей части.
Недостаток известного способа и устройства состоит в том, что моделирование нагрузок известным способом и устройством не обеспечивает идентичность нагрузок в широком диапазоне их изменения, в частности нагрузок при раскалывании предметов.
Известным способом и устройством также невозможно воспроизвести (смоделировать) характеристики ударов (изменение ударных нагрузок в процессе смещения приемника ударов), в полной мере идентичные характеристикам в условиях разрушения предметов, в частности, не воспроизводится специфическая фаза резкого сброса ударной нагрузки, существующая на заключительном этапе разрушения любых предметов, особенно при необходимости постановки техники и отработки удара с целью раскалывания предметов.
3. Сущность изобретения
3.1. Постановка технической задачи
Техническая задача направлена на устранение недостатков известного технического решения путем моделирования на тренажерных устройствах в широком диапазоне изменения ударных нагрузок, наиболее полно соответствующих ударным нагрузкам при раскалывании предметов.
В предлагаемом способе и устройстве его реализации обеспечивается смещение приемника ударов под действием ударной нагрузки, максимально приближенное к деформации при разрушении потенциальных объектов ударного воздействия.
Решение задачи достигается за счет того, что моделирование ударных нагрузок, воздействующих на приемник ударов тренажера, производится путем трансформации величины смещения приемника в деформацию упругой рабочей части с использованием преобразователя и сведения к минимуму влияния инерционных эффектов, связанных с движением раскалываемых предметов и приемника при ударах.
3.3. Перечень фигур.
Предлагаемое решение поясняется схемами, представленными на фиг.1 - фиг.7:
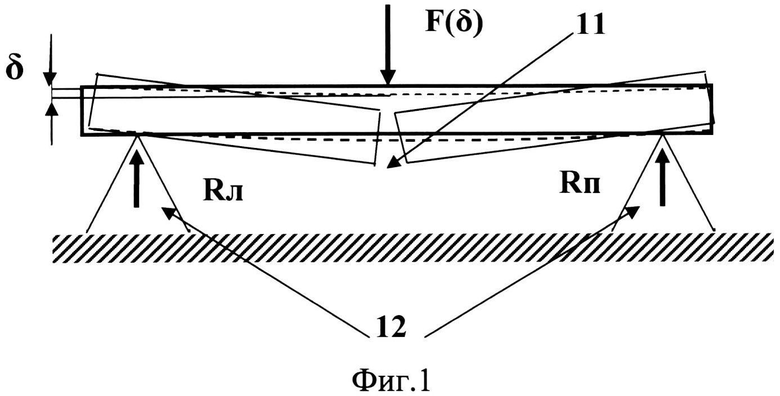
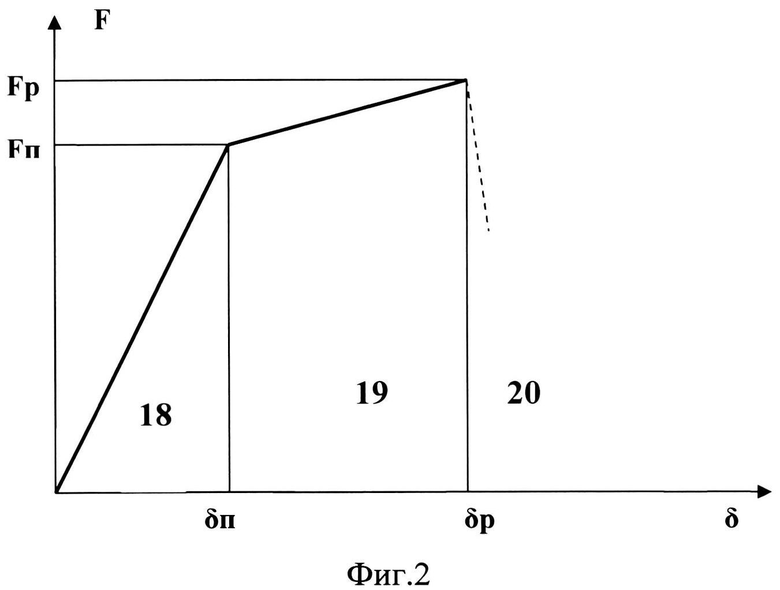
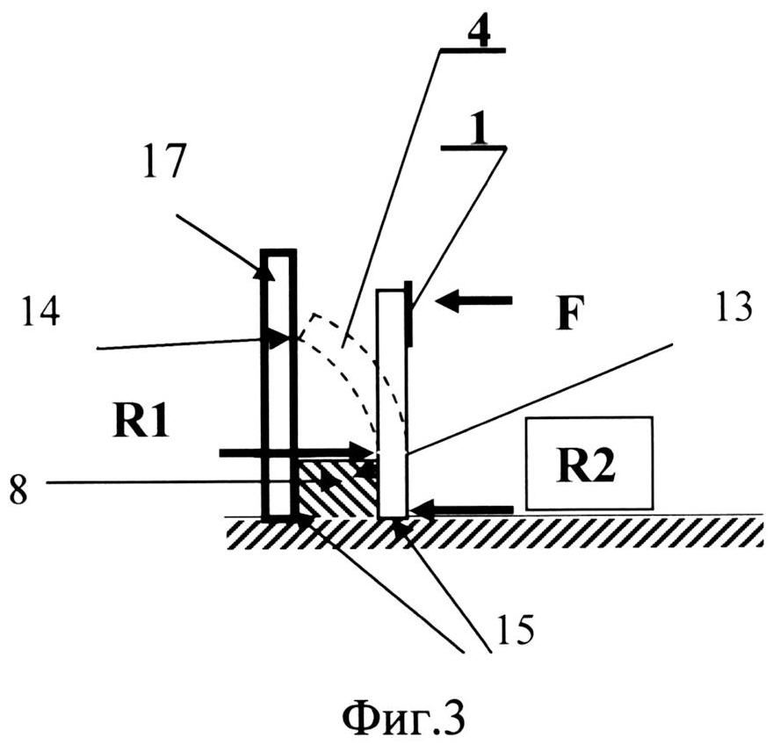
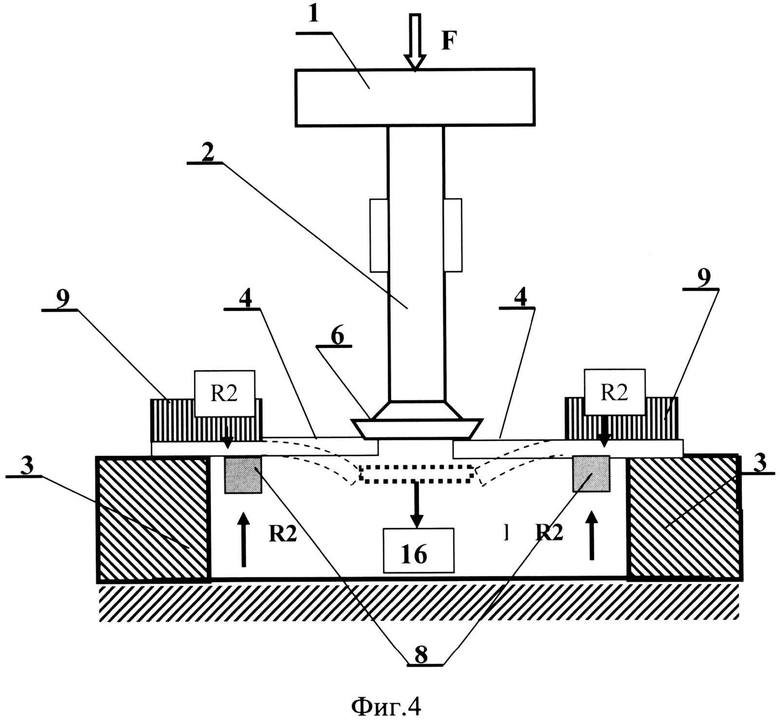
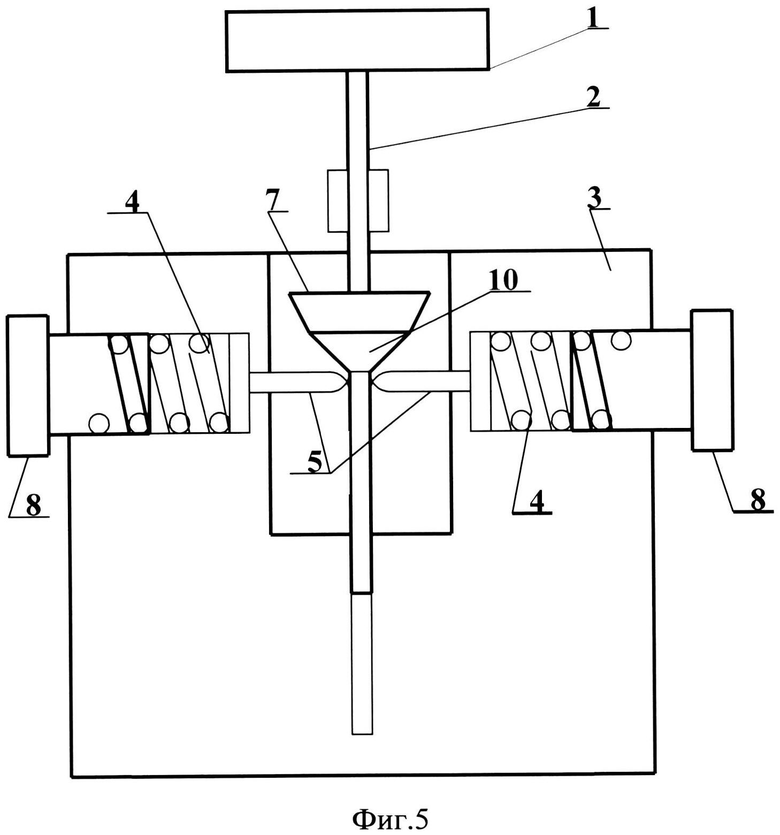
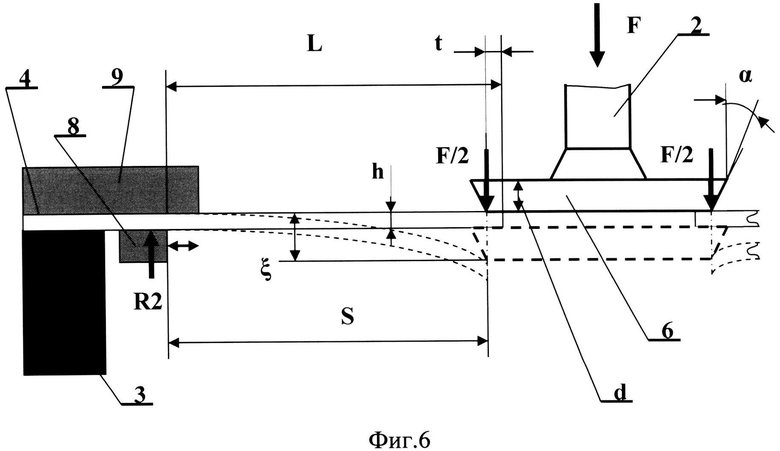
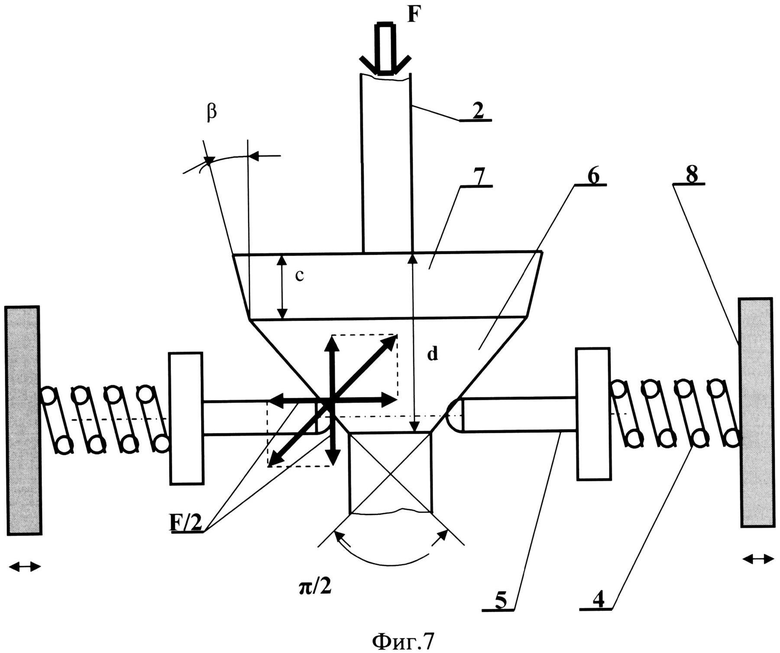
на фиг.1 - схема штатного силового испытания разрушающего ударного воздействия единоборца при раскалывании твердых предметов (тест «тамэсивари»), характеризуемого диаграммой деформации δ при разрушении предметов под действием нагрузки F(δ); на фиг.2 - характерная поэтапная диаграмма изменения ударной нагрузки (F) в зависимости от деформации (прогиба) (δ) предмета при его раскалывании в условиях штатного испытания; на фиг.3 - схема тренажера для отработки ударов (схема прототипа) неразрушающим методом с приемником ударов, закрепленным на упругой рабочей части в виде консольной изгибаемой балки; на фиг.4 - устройство тренажера с моделированием ударной характеристики неразрушающим методом с двумя жестко фиксированными и разнесенными (раздвинутыми с зазором) плоскими упругими элементами; на фиг.5 - устройство тренажера с моделированием ударной характеристики с пружинными упругими элементами; на фиг.6 - схема деформации плоских упругих элементов устройства, представленного на фиг.4, под действием нагрузок, с диаграммой смещения ξ под действием нагрузки F(ξ); на фиг.7 - схема равновесия сил, передаваемых от приемника ударов к пружинным упругим элементам устройства, представленного на фиг.5, где 1 - приемник ударов, 2 - штанга, 3 - основание, 4 - упругий элемент, 5 - шток; 6 - преобразователь, 7 - верхний конус преобразователя; 8 - регулятор жесткости, 9 - панель, 10 - нижний конус преобразователя, 11 - разрушение разбиваемого предмета при предельном значении Fp, 12 - опорные элементы штатного силового испытания, 13 - опорный элемент регулятора жесткости (плеча момента силы), 14 - касание упругим элементом 4 контрольного элемента 17 при предельном значении Fp, 15 - жестко-фиксированное соединение, 16 - проскальзывание преобразователя 6 между упругими элементами 4 при предельном значении нагрузки Fp, 17 - контрольный элемент; 18 - зона упругой деформации на диаграмме, 19 - первая стадия разрушения образца на диаграмме; 20 - вторая стадия разрушения с резким сбросом нагрузки на диаграмме; F - нагрузка, воздействующая на разбиваемый предмет или приемник ударов, Fп - максимальная нагрузка на разбиваемый предмет в пределах его упругой деформации, Fp - максимальная разрушающая нагрузка, F(δ) - функциональная зависимость между нагрузкой и деформацией разбиваемого предмета; F(ξ) - функциональная зависимость между нагрузкой и смещением приемника ударов, R1 - сила реакции опорного элемента регулятора жесткости, R2 - сила поджатия упругого элемента, Rл - сила реакции левой опоры, Rп - сила реакции правой опоры, δ - деформация разбиваемого предмета, δп -предельное значение упругой деформации предмета, δр - максимальная деформация предмета в процессе разрушения, ξ - смещение приемника ударов, смещение преобразователя, h - толщина плоского упругого элемента, t - величина перекрытия («захлеста») преобразователя и плоского упругого элемента в исходном состоянии, d - высота преобразователя, L - длина свободной (незащемленной) части плоского упругого элемента, S - расстояние от регулятора до торцевой части упругого плоского элемента под нагрузкой, α, β - углы конусности.
3.4. Отличительные признаки.
В отличие от известного способа преобразование энергии ударов в упругую деформацию рабочей части осуществляют путем трансформации смещения ξ приемника в ударную нагрузки F(ξ) в соответствии с диаграммой деформации δ раскалываемого предмета под действием разрушающей нагрузки F(δ).
При этом трансформацию можно осуществлять преобразователем, обеспечивающим заданную функциональную связь между смещением приемника ударов ξ, деформацией упругой рабочей части и ударными нагрузками F(ξ), действующими на приемник ударов. Кроме того, при реализации способа желательно обеспечивать соблюдение условия Мп=0,4-0,6Мр, где Мп - масса приемника и движущихся вместе с ним частей устройства, Мр - масса разрушаемого предмета.
В устройстве для реализации способа моделирования ударных характеристик в отличие от известного между приемником ударов и упругой рабочей частью размещают механический преобразователь, профилированный в зоне контакта с рабочей частью, при этом преобразователь жестко соединен с приемником ударов и подвижно - с упругой рабочей частью (для преобразования смещения приемника ударов в деформацию упругой части с заданным усилием нагрузки, действующей на приемник), что обеспечивает трансформацию смещения ξ приемника в ударную нагрузки F(ξ) в соответствии с диаграммой деформации δ раскалываемого предмета под действием разрушающей нагрузки F(δ).
Упругая рабочая часть и преобразователь устройства могут иметь различные варианты исполнения.
В частности, упругая рабочая часть устройства может состоять из двух упругих элементов в виде гибких плоских прямоугольных пластин, размещенных в одной плоскости на фиксированном расстоянии друг от друга, пластины консольно прижаты снизу к панелям, скрепленным с основанием, регуляторами жесткости в виде прижимных брусьев с возможностью продольного перемещения регуляторов вдоль пластин, приемник ударов жестко связан при помощи штанги, которая может свободно смещаться вдоль оси, с профилированным преобразователем в форме прямоугольной плиты с заданной высотой, с продольным размером нижней грани больше расстояния между пластинами и двумя боковыми гранями, обращенными к пластинам, расположенными под заданным углом к вертикали, причем плита в исходном состоянии свободно опирается нижней гранью на пластины с определенной и одинаковой величиной перекрытия с каждой из пластин.
Также, в частности, упругая рабочая часть устройства может состоять из двух или нескольких осесимметрично расположенных навстречу друг другу подпружиненных штоков, встроенных в основание, концы штоков контактируют с преобразователем, который в зоне контакта со штоками имеет форму двух последовательно расположенных усеченных конусов с различными углами конусности, угол верхнего конуса меньше угла нижнего конуса, высота нижнего конуса выбирается равной величине упругой деформации разрушаемого предмета, суммарная высота двух конусов должна быть равна максимальной деформации разрушаемого предмета, регулятор жесткости представляет собой винтовую заглушку с заходным участком для навивки части пружинного упругого элемента, жесткость пружин подобрана таким образом, чтобы максимальное усилие нагрузки на приемник ударов при его смещении вниз было равно величине разрушающей нагрузки на предмет.
Способ и устройство позволяют воспроизводить (моделировать) ударные нагрузки, возникающие при ударном разрушении разбиваемых предметов.
Под действием нагрузки разбиваемый предмет начинает деформироваться (пунктирные линии на фиг.1). Связь нагрузки F с величиной деформации (прогиб центральной части) δ разрушаемого предмета, например доски, имеет три характерные зоны (фазы), отмеченные на фиг.2 цифрами 18, 19, 20. В зоне упругой деформации (участок диаграммы 18) разрушение образца еще не начинается, деформация растет до величины δп пропорционально нагрузке до ее значения Fп. На участке 19 (зона разрушения) деформация возрастает при слабом увеличении нагрузки. Реально в этой зоне диаграмма имеет вид дуги, которую можно аппроксимировать отрезком прямой линии (полка). После достижения максимального (разрушающего) значения нагрузки Fp, соответствующего деформации δр, наступает фаза 20 резкого сброса нагрузки (показано пунктиром). Движение ударной конечности в условиях этой фазы разрушения продолжается при нагрузках, стремящихся к нулю.
На устройстве, выбранном в качестве прототипа (фиг.3), можно моделировать только нагрузки зоны 18 разрушаемого элемента. Изменяя положение регулятора жесткости 8 упругой рабочей части, можно варьировать угол наклона прямой линии диаграммы в этой зоне.
Пример 1 устройства
Заявляемое устройство с плоскими упругими элементами (фиг.4) включает основание 3, приемник ударов 1, упругую рабочую часть, регулятор жесткости 8 упругой рабочей части. Упругая рабочая часть состоит из двух упругих элементов в виде двух гибких плоских прямоугольных пластин 4, размещенных в одной плоскости на фиксированном расстоянии друг от друга. Пластины консольно прижаты снизу к панелям 9, закрепленным на основании, регуляторами жесткости в виде прижимных брусьев с возможностью продольного перемещения регуляторов вдоль пластин. Приемник ударов жестко связан при помощи штанги 2, которая может свободно смещаться вдоль оси, с профилированным преобразователем 6 в форме плиты с заданной высотой, с продольным размером нижней грани больше расстояния между пластинами и двумя боковыми гранями, обращенными к пластинам, расположенными под заданным углом к вертикали. Плита в исходном состоянии свободно опирается нижней гранью на пластины с определенной и одинаковой величиной перекрытия с каждой из пластин.
Пример 2 устройства
Устройство с пружинными упругими элементами (фиг.5) также включает основание 3, приемник ударов 1, штангу 2, упругую рабочую часть, регулятор жесткости 8. Упругая рабочая часть состоит из двух или нескольких осесимметрично расположенных навстречу друг другу подпружиненных штоков 5, встроенных в основание, концы штоков контактируют с преобразователем, который в зоне контакта со штоками имеет форму двух последовательно расположенных усеченных конусов 7 и 10 с различными углами конусности (у верхнего угол меньше, чем у нижнего), высота нижнего конуса 10 выбирается равной величине упругой деформации разрушаемого предмета, суммарная высота двух конусов должна быть равна максимальной деформации разрушаемого предмета, регулятор жесткости представляет собой винтовую заглушку 8 с заходным участком для навивки части пружинных упругих элементов 4, жесткость пружин должна быть подобрана таким образом, чтобы максимальное усилие нагрузки на приемник при его смещении вниз было равно величине разрушающей нагрузки.
Устройство с плоскими упругими элементами (фиг.4) работает следующим образом.
В момент контакта ударной конечности с приемником ударов 1 начинается смещение ξ приемника и жестко связанного с ним преобразователя 6. Смещение преобразователя приводит к изгибу плоских упругих элементов с появлением сил взаимодействия, пропорциональных величине смещения. По мере изгиба элементов (пластин) увеличивается расстояние между ними. Пока это расстояние не сравняется с длиной нижней грани преобразователя, диаграмма F(ξ) будет представлять собой отрезок прямой (первый этап смещения приемника и преобразователя), подобно участку 18 диаграммы разрушаемого предмета F(δ) (фиг.2). На следующем этапе смещения происходит проскальзывание боковых граней преобразователя вдоль торцов пластин. Пластины при этом продолжают прогибаться, но прирост сил взаимодействия между преобразователем и упругими элементами по мере смещения преобразователя происходит с меньшим градиентом, чем на первом этапе. Диаграмма F(ξ) на втором этапе имеет вид прямой линии, имеющей меньший угол наклона к горизонту по сравнению с участком диаграммы на первом этапе (подобно зоне 19 фиг.2). Когда расстояние между торцами пластин сравняется с длиной верхней грани плиты, произойдет с относительно небольшим усилием продавливание преобразователя через пластины с резким снижением до нуля ударной нагрузки (подобно зоне 20 на фиг.2). Таким образом, с помощью заявляемого устройства можно, в отличие от прототипа, моделировать характер изменения ударной нагрузки подобно диаграмме разрушаемого предмета. Целенаправленно задавая размеры преобразователя и устанавливая регулятором уровень жесткости пластин, можно обеспечить опытным или расчетным путем не только качественную, но и количественную идентичность диаграмм F(ξ) и F(δ).
Принцип расчетного подхода определения значений определяющих параметров можно пояснить с помощью схемы фиг.6. На этой схеме сплошными линиями показано исходное положение преобразователя и пластин, пунктирными линиями - их положение, когда расстояние между торцами пластин равно длине нижней грани плиты, что соответствует границе перехода от первого этапа смещения преобразователя ко второму. На этой границе из условия идентичности диаграмм F(ξ) и F(δ) следует, что смещение преобразователя, равное величине прогиба пластин, должно составлять ξ=δп, а нагрузка на каждую из пластин равна Fп/2. Величина перекрытия t выбирается из условия
t=L-S. Для упругой консольно защемленной пластины толщиной h, шириной b и длиной L связь прогиба с нагрузкой на этой границе выражается известной формулой:

где Е - модуль упругости материала пластины.
Для конкретно выбранной пластины, например, из стального сплава с известным модулем упругости можно на основе формулы (1) рассчитать длину незащемленной части пластины, определяющей расположение регулятора жесткости

Если допустить, что форма изогнутой части пластины близка к дуге окружности, тогда эту часть можно рассматривать как половину дуги сегмента высотой ξ и хордой, равной 2S. В этом случае по известным формулам для элементов сегмента можно рассчитать разницу между длиной дуги и хорды, которая должна быть равна двойной величине перекрытия (2t). На такую величину длина нижней грани плиты должна быть больше исходного фиксированного расстояния между пластинами. Таким образом, по приведенной выше расчетной схеме можно определить (выбрать) параметры преобразователя и упругой рабочей части, при которых обеспечивается идентичность диаграмм F(ξ) и F(δ) на первом участке. По аналогичной схеме можно определить высоту плиты d и угол наклона ее боковых граней α, при которых реализуются требуемые условия (ξ=δр, F=Fp) на границе второго и третьего участков.
В устройстве с пружинными упругими элементами (фиг.5) усилие на штоке изменяется пропорционально его смещению. В частном случае выполнения нижнего конуса преобразователя с углом при вершине, равным π/2 (фиг.7), смещение штока при контакте с этим конусом равно смещению преобразователя ξ. Для обеспечения идентичности диаграмм F(ξ) и F(δ) общая высота преобразователя d должна быть равна δр, а высота нижнего конуса (d-с)=δп.Усилие на каждом штоке при контакте с верхней границей нижнего конуса должно быть равно Fп/2, максимальное усилие при контакте с
верхним конусом (в районе его верхней границы) - Fp/2. Требуемую жесткость k пружинного упругого элемента можно рассчитать по зависимости k=Fп/2δп. Угол конусности β верхнего конуса должен быть меньше π/4 (в этом случае наклон отрезка прямой на втором участке диаграммы F(ξ) будет меньше, чем на первом участке). Чтобы избежать возможных уступов на диаграмме, граница перехода конусов преобразователя должна быть скруглена.
Авторы настоящей заявки провели исследование зависимости F(δ) при разрушении с помощью пресса досок из древесины хвойных пород с типовыми размерами 330×210×24 мм. Согласно результатам исследований, предельная средняя величина упругой деформации доски δп составляет 6 мм при нагрузке Fп=900 Н (92 кгс). Максимальная деформация доски δр достигает 14 мм при разрушающей нагрузке Fp=1075 Н (110 кгс). В соответствии с расчетами по приведенным выше методикам, на устройстве с плоскими упругими элементами можно обеспечить диаграмму F(ξ), близкую к диаграмме F(ξ) для доски, при следующем варианте (возможны и другие варианты) соотношений размеров преобразователя (плиты) и упругих элементов (пластин):
При смещении регулятора можно плавно снижать или увеличивать максимальную величину нагрузки, при которой происходит проталкивание преобразователя через пластины.
Пример реализации.
Для проверки заявленных технических решений была изготовлена модель устройства с плоскими упругими элементами в виде закаленных пластин из стального сплава толщиной 1 мм и шириной 150 мм. Приемник ударов был совмещен с преобразователем и имел размеры, как у разбиваемой доски. При размерах длины незащемленной части пластины 35 мм и величине перекрытия 2 мм были проведены эксперименты по ударному продавливанию преобразователя через упругие элементы падающим грузом массой 2 кг. По такому же методу проводились контрольные испытания с разбиванием стопки из двух досок (согласно расчетным оценкам, при указанных размерах модели устройства должны воспроизводиться ударные характеристики разрушения такой стопки досок). Эксперименты показали, что значения энергий продавливания преобразователя и разрушения досок были близки друг к другу.
Предлагаемое изобретение может быть использовано в различных видах восточных единоборств или в системе армейского рукопашного боя при подготовке к испытаниям или соревнованиям по раскалыванию твердых предметов (образцов) руками или ногами (тест «тамэсивари»), совершенствовании техники и эффективности ударов, укреплении ударных конечностей, закалке ударных поверхностей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТАНОВКА ТЕРМИЧЕСКОГО КРЕКИНГА ТЯЖЕЛЫХ НЕФТЕПРОДУКТОВ В МЕТАСТАБИЛЬНОМ СОСТОЯНИИ | 2017 |
|
RU2673545C2 |
| ПОВЕРХНОСТНЫЙ УДАРНО-ВОЛНОВОЙ ГАЗОДИНАМИЧЕСКИЙ ВИБРОУПЛОТНИТЕЛЬ ДЛЯ ФОРМОВАНИЯ БЕТОННЫХ ОБЪЕКТОВ | 1999 |
|
RU2160663C2 |
| УСТРОЙСТВО СИМУЛЯЦИИ ПОВЕДЕНИЯ СПОРТСМЕНА-ЕДИНОБОРЦА | 2016 |
|
RU2692900C2 |
| УДАРНО-ВОЛНОВОЙ СПОСОБ ОБРАБОТКИ КОНГЛОМЕРАТНЫХ СРЕД ПРИ ФОРМИРОВАНИИ ИСКУССТВЕННЫХ СТРОИТЕЛЬНЫХ МАТЕРИАЛОВ | 1999 |
|
RU2164204C2 |
| УДАРНО-ВОЛНОВАЯ ГАЗОДИНАМИЧЕСКАЯ УСТАНОВКА ДЛЯ ФОРМОВАНИЯ БЕТОННЫХ ОБЪЕКТОВ С ПУСТОТАМИ | 1999 |
|
RU2169073C2 |
| КЛИНОВАЯ УДАРНО-ВОЛНОВАЯ ГАЗОДИНАМИЧЕСКАЯ УСТАНОВКА ДЛЯ ФОРМОВАНИЯ БЕТОНОВ | 1999 |
|
RU2163543C2 |
| СПОСОБ И УСТАНОВКА ПЕРЕРАБОТКИ ТЯЖЕЛЫХ НЕФТЕПРОДУКТОВ С ПАРАМИ ВОДЫ | 2020 |
|
RU2780649C2 |
| ЗАБОЙКА | 2020 |
|
RU2736017C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ УДАРОВ | 2023 |
|
RU2818869C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ УДАРОВ | 2023 |
|
RU2819436C1 |
. Изобретение относится к области разработки тренажеров, предназначенных для повышения эффективности ударов в восточных единоборствах, в частности при подготовке единоборцев к испытаниям или соревнованиям по раскалыванию твердых предметов руками или ногами (тест «тамэсивари»). Способ заключается в преобразовании энергии ударов в упругую деформацию рабочей части устройства путем трансформации смещения ξ приемника в ударную нагрузку F(ξ) в соответствии с диаграммой деформации δ раскалываемого предмета под действием разрушающей нагрузки F(δ). Устройство содержит размещенный между приемником ударов и упругой рабочей частью механический преобразователь, жестко соединенный с приемником ударов и подвижно - с упругой рабочей частью. В предлагаемом способе и устройстве обеспечивается смещение приемника ударов под действием ударной нагрузки, максимально приближенное к деформации при разрушении потенциальных объектов ударного воздействия, что позволяет неразрушающим методом моделировать ударную нагрузку для использования как в соревнованиях по раскалыванию твердых предметов (образцов) руками или ногами (тест «тамэсивари»), так и при совершенствовании техники и эффективности ударов, укреплении ударных конечностей, закалке ударных поверхностей тренирующихся в различных видах восточных единоборств или в системе армейского рукопашного боя. 2 н. и 4 з.п. ф-лы, 7 ил.
1. Способ моделирования ударных характеристик при отработке ударов на тренажерах в единоборствах, включающий операции регулирования жесткости упругой рабочей части, нанесение ударов по приемнику ударов, преобразование энергии ударов в упругую деформацию рабочей части, отличающийся тем, что преобразование энергии ударов в упругую деформацию рабочей части осуществляют путем трансформации смещения ξ приемника в ударную нагрузку F(ξ) в соответствии с диаграммой деформации δ раскалываемого предмета под действием разрушающей нагрузки F(δ).
2. Способ по п.1, отличающийся тем, что трансформацию осуществляют механическим преобразователем, обеспечивающим заданную функциональную связь между смещением приемника ударов ξ, деформацией упругой рабочей части и ударными нагрузками F(ξ), действующими на приемник ударов.
3. Способ по п.1, отличающийся тем, что при реализации способа обеспечивают условие Мп=(04-0,6)Мр, где Мп - масса приемника и движущихся вместе с ним частей устройства, Мр - масса разрушаемого предмета.
4. Устройство моделирования ударных характеристик при отработке ударов на тренажерах в единоборствах, содержащее основание, приемник ударов, упругую рабочую часть, регулятор жесткости упругой рабочей части, отличающееся тем, что между приемником ударов и упругой рабочей частью размещают механический преобразователь, профилированный в зоне контакта с рабочей частью, преобразователь жестко соединен с приемником ударов и подвижно - с упругой рабочей частью.
5. Устройство по п.4, отличающееся тем, что упругая рабочая часть состоит из двух упругих элементов в виде гибких плоских прямоугольных пластин, размещенных в одной плоскости на фиксированном расстоянии друг от друга, пластины консольно прижаты снизу к панелям, скрепленным с основанием, регуляторами жесткости в виде прижимных брусьев с возможностью продольного перемещения регуляторов вдоль пластин, приемник ударов жестко связан при помощи штанги, которая может свободно смещаться вдоль оси, с профилированным преобразователем в форме прямоугольной плиты с заданной высотой, с продольным размером нижней грани больше расстояния между пластинами и двумя боковыми гранями, обращенными к пластинам, расположенными под заданным углом к вертикали, причем плита в исходном состоянии свободно опирается нижней гранью на пластины с определенной и одинаковой величиной перекрытия с каждой из пластин.
6. Устройство по п.4, отличающееся тем, что упругая рабочая часть состоит из двух или нескольких осесимметрично расположенных навстречу друг другу подпружиненных штоков, встроенных в основание, концы штоков контактируют с преобразователем, который в зоне контакта со штоками имеет форму двух последовательно расположенных усеченных конусов с различными углами конусности, угол верхнего конуса меньше угла нижнего конуса, высота нижнего конуса выбирается равной величине упругой деформации разрушаемого предмета, суммарная высота двух конусов должна быть равна максимальной деформации разрушаемого предмета, регулятор жесткости представляет собой винтовую заглушку с заходным участком для навивки части пружинного упругого элемента, жесткость пружин подобрана таким образом, чтобы максимальное усилие нагрузки на приемник ударов при его смещении вниз было равно величине разрушающей нагрузки на предмет.

