Изобретение относится к упорядочению величины времени и/или частоты гетеродина.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
В некоторых сетях сетевой узел может иметь гетеродин (LO), который используется для синхронизации в сетевом узле. С целью уменьшения стоимости сетевого узла, гетеродин может не иметь такой точности, как главный источник тактовых импульсов (опорных сигналов), который обеспечивает хронирующий сигнал для сети.
Гетеродин сетевого узла может быть упорядочен внешним источником опорного сигнала для исправления ошибок сдвига частоты, которые возникают с течением времени.
Когда используется единственный главный источник опорного сигнала для упорядочения гетеродина, и если по определенным причинам главный источник опорного сигнала не точен или если главный источник опорного сигнала не может быть использован для упорядочения гетеродина, например в случае, когда в качестве источника опорного сигнала используется сигнал GPS и захват GPS потерян, или если ненадлежащее функционирование сети означает, что главный эталон времени сети недоступен, то производительность сетевого узла и любых других узлов, которые могут поддерживаться местным хронирующим сигналом сетевого узла, ухудшается. Когда главный источник опорного сигнала недоступен и нет никаких альтернативных доступных источников сигнала, потребуется вмешательство оператора для коррекции или восстановления синхронизации сетевого узла. Однако вмешательство человека может оказаться трудоемким и дорогостоящим.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Согласно одной цели изобретения, обеспечивается устройство, содержащее: гетеродин (LO), сконфигурированный для формирования первого сигнала, содержащего, по меньшей мере, один из следующих компонентов: информацию о времени; информацию о частоте; информацию о фазе и их комбинацию; блок присвоения приоритетов, содержащий, по меньшей мере, два входа, причем каждый вход предназначен для получения соответствующего второго сигнала, содержащего, по меньшей мере, один из следующих компонентов: информацию о времени; информацию о частоте; информацию о фазе и их комбинации; блок присвоения приоритетов предназначен для выполнения следующих действий: определения точности, по меньшей мере, одного второго сигнала, по меньшей мере, двух вторых сигналов относительно второго сигнала, выделенного как наиболее точный, по меньшей мере, из двух вторых сигналов; и упорядочения, по меньшей мере, двух вторых сигналов от наиболее точного до наименее точного, в котором LO упорядочивается для исправления ошибки сдвига LO относительно наиболее точного второго сигнала, который доступен устройству на основе порядка, по меньшей мере, двух вторых сигналов.
В некоторых примерах воплощения второй сигнал, по меньшей мере, из двух вторых сигналов выбирается как наиболее точный выделенный второй сигнал с целью упорядочения, по меньшей мере, двух вторых сигналов.
В некоторых примерах воплощения, если выделенный наиболее точный второй сигнал недоступен, гетеродин упорядочивается относительно последующего наиболее точного второго сигнала, который доступен устройству, основанному на упорядочивании, по меньшей мере, одного из двух вторых сигналов.
В некоторых примерах воплощения каждый вход, по меньшей мере, из двух входов используется для получения соответствующего второго сигнала, который является одним из группы сигналов, содержащих: (а) хронирующий сигнал GPS; (b) сетевой хронирующий сигнал; (с) сетевой сигнал частоты; (d) сигнал, вытекающий из математической модели LO, (е) сигнал, полученный за период, в течение которого LO упорядочивается выделенным наиболее точным вторым сигналом; и (f) сигнал, включающий информацию о синхронизации.
В некоторых примерах воплощения сетевой хронирующий сигнал выбран по стандарту IEEE 1588.
В некоторых примерах воплощения сетевой сигнал частоты выбран в соответствии, по меньшей мере, с одним из: синхронный Ethernet и адаптивное восстановление синхронизации (ACR).
В некоторых примерах воплощения математическая модель LO является, по меньшей мере, одной из: сформированное устройством и сохраненное устройством.
В некоторых примерах воплощения каждый вход, по меньшей мере, из двух входов используется для получения соответствующего второго сигнала через один из следующих компонентов: свободное пространство, электрический проводник и оптический проводник.
В некоторых примерах воплощения порядок, по меньшей мере, двух вторых сигналов от наиболее точного до наименее точного изменяется в течение длительного времени в зависимости от различных факторов, которые влияют на вторые сигналы.
В некоторых примерах воплощения устройство конфигурируется для выполнения, по меньшей мере, одного из следующих действий: (а) получение информации, отправленной, по меньшей мере, одним источником, внешним по отношению к устройству, информации, относящейся к доступности, по меньшей мере, одного источника, чтобы обеспечить один вход, по меньшей мере, из двух входов соответствующим вторым сигналом, и (b) обнаружение доступности, по меньшей мере, одного источника, внешнего по отношению к устройству, который обеспечивает один вход, по меньшей мере, из двух входов соответствующим вторым сигналом.
В некоторых примерах воплощения блок присвоения приоритетов дополнительно содержит множество генераторов сигналов коррекции, при этом каждый генератор сигналов коррекции связан с соответствующим входом, каждый генератор сигналов коррекции сконфигурирован для приема второго сигнала; каждый генератор сигналов коррекции сконфигурирован для приема тактового сигнала от гетеродина; каждый генератор сигналов коррекции сконфигурирован для формирования сигнала коррекции, который является функцией полученного входного сигнала и тактового сигнала от гетеродина; множество сумматоров по одному сумматору для каждого второго сигнала кроме второго сигнала, выделенного как наиболее точный сигнал, каждый сумматор сконфигурирован для приема сигнала коррекции из второго сигнала, выделенного как наиболее точный сигнал, и сигнала коррекции от одного из других вторых сигналов; селектор сигнала коррекции, сконфигурированный для приема выходных сигналов сумматоров, в котором селектор сигнала коррекции дополнительно используется для упорядочения, по меньшей мере, двух вторых сигналов от наиболее точного до наименее точного сигнала как функции выхода сумматоров.
Согласно другой цели изобретения, оно обеспечивает способ, включающий: гетеродин (LO), формирующий первый сигнал, содержащий, по меньшей мере, один из следующих компонентов: хронирующий сигнал; частоту; информацию о фазе и их комбинации; прием, по меньшей мере, одного из двух вторых сигналов, причем каждый второй сигнал содержит, по меньшей мере, один из следующих компонентов: информацию о времени; информацию о частоте; информацию о фазе и их комбинации, в котором, по меньшей мере, один из двух вторых сигналов поступает от внешнего источника; определение точности, по меньшей мере, одного второго сигнала, по меньшей мере, из двух вторых сигналов относительно второго сигнала, выделенного как наиболее точный сигнал, по меньшей мере, из двух вторых сигналов; упорядочение, по меньшей мере, одного из двух вторых сигналов от наиболее точного до наименее точного; и упорядочение LO для исправления ошибки сдвига частоты LO относительно наиболее точного второго сигнала, который доступен на основе упорядочения, по меньшей мере, двух вторых сигналов.
В некоторых примерах воплощения способ дополнительно содержит: выбор второго сигнала, по меньшей мере, из двух вторых сигналов как выделенный наиболее точный второй сигнал с целью упорядочения, по меньшей мере, двух вторых сигналов.
В некоторых примерах воплощения, когда выделенный наиболее точный второй сигнал недоступен, способ включает: упорядочение LO для исправления ошибки сдвига, содержащее упорядочение LO для исправления ошибки сдвига относительно следующего наиболее точного второго сигнала, который доступен на основе упорядочения, по меньшей мере, двух вторых сигналов.
В некоторых примерах воплощения прием каждого, по меньшей мере, из двух вторых сигналов включает для каждого, по меньшей мере, из двух вторых сигналов получение соответствующего сигнала, который является одним из группы сигналов, содержащих: (а) хронирующий сигнал GPS; (b) сетевой хронирующий сигнал; (с) сетевой сигнал частоты (d); сигнал, вытекающий из математической модели LO, и (е) сигнал, полученный за период, в течение которого LO упорядочивается выделенным наиболее точным вторым сигналом, и (f) сигнал, содержащий информацию о синхронизации.
В некоторых примерах воплощения, получение сетевого хронирующего сигнала включает получение сетевого хронирующего сигнала, отвечающего стандарту IEEE 1588.
В некоторых примерах воплощения, получение сетевого сигнала частоты включает получение сетевого сигнала частоты в соответствии, по меньшей мере, с одним из:
синхронный Ethernet и адаптивное восстановление синхронизации (ACR).
В некоторых примерах воплощения способ дополнительно содержит, по меньшей мере, одно из следующих действий: формирование математической модели LO и поддержание математической модели LO.
В некоторых примерах воплощения способ дополнительно содержит, по меньшей мере, одно из следующих действий: (а) получение информации, отправленной, по меньшей мере, одним внешним источником, информации, относящейся к доступности, по меньшей мере, одного внешнего источника, чтобы обеспечить второй сигнал, по меньшей мере, из двух вторых сигналов, и (b) обнаружение доступности, по меньшей мере, одного внешнего источника, который обеспечивает второй сигнал, по меньшей мере, как один из двух вторых сигналов.
В некоторых примерах воплощения способ дополнительно содержит переупорядочение, по меньшей мере, двух вторых сигналов от наиболее точного до наименее точного, основанного на различных факторах, которые влияют на вторые сигналы с течением времени.
Другие аспекты и функции настоящего изобретения станут очевидными для квалифицированных специалистов при чтении следующего описания определенных примеров воплощения изобретения со ссылками на сопроводительные чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Примеры воплощения изобретения будут теперь описаны со ссылками на приложенные чертежи, на которых:
Фигура 1 - блок-схема, иллюстрирующая пример способа в соответствии с целью изобретения;
Фигура 2 - технологическая схема системы, в которой могут быть реализованы некоторые примеры воплощения данного изобретения;
Фигура 3 - технологическая схема примера управляемого устройства в соответствии с целью изобретения;
Фигура 4 - конечное состояние согласно примеру воплощения изобретения;
Фигура 5 - блок-схема, иллюстрирующая другой пример способа в соответствии с целью изобретения; и
Фигура 6 - технологическая схема примера управляемого устройства согласно другой цели изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРИМЕРОВ ВОПЛОЩЕНИЯ ИЗОБРЕТЕНИЯ
В текущих примерах воплощения сети имеют множество сетевых элементов, например множество базовых станций или сетевых ретрансляторов, которые включают локальные источники опорных сигналов, без связи между местными источниками опорных сигналов. В результате избыточность местных источников опорных сигналов не используется для повышения стабильности синхронизации общей сети опорных сигналов.
Данное изобретение описывает систему и способ, посредством которых гетеродин (LO) используется для локальной поддержки точного времени в управляемом устройстве, при этом LO упорядочивается, чтобы сохранить точное время относительно одного из множества источников точного времени и/или частоты. В некоторых примерах воплощения, один или несколько из множества источников точного времени и/или частоты являются более точными и/или более стабильными, чем LO. Следовательно, когда первичный источник опорный сигнал недоступен, для упорядочения LO можно использовать альтернативный источник опорного сигнала и обеспечить более точный хронирующий сигнал и/или сигнал частоты, чем мог бы обеспечить непосредственно LO.
В некоторых примерах воплощения, один или несколько множества источников опорных сигналов и/или частоты являются менее точными и/или менее стабильными, чем упорядоченный LO, при условии что: (1) точность (которая определяется сдвигом частоты) может быть точно охарактеризована LO, если он упорядочен более стабильным и точным источником, и (2) стабильность частоты с временной зависимостью от источников опорных сигналов и/или частоты может быть охарактеризована, если LO упорядочивается более стабильным источником. Использование характеристики опорного сигнала в виде (1) и (2) может обеспечить компенсацию источника опорных сигналов по точности и стабильности, делая его пригодным для использования, когда теряется первичный источник опорного сигнала.
Когда доступно больше одного источника опорных сигналов и/или частоты, выбирается один из доступных источников опорных сигналов времени и/или частоты, в качестве первичного источника опорного сигнала. Первичный источник опорного сигнала выбирается как самый точный из доступных источников сигнала. Первичный источник опорного сигнала является любым источником опорного сигнала времени и/или частоты, который рассматривается как надежный источник опорного сигнала времени и/или частоты для синхронизации и/или синтонизации системы. Другие источники опорного сигнала времени и/или частоты являются менее точными источниками опорных сигналов, которые могут использоваться, когда недоступен первичный источник опорного сигнала. Главный источник опорного сигнала, который выбирается как первичный источник опорного сигнала, может время от времени изменяться. Например, если выбран новый главный источник опорного сигнала, который был ранее недоступен при выборе первичного источника опорного сигнала, определяется как более точный, чем текущий первичный источник опорного сигнала, новый главный источник опорного сигнала может быть выбран как первичный источник опорного сигнала, а прежний первичный источник опорного сигнала определяется как альтернативный источник опорного сигнала.
Один или несколько источников опорных сигналов и/или частоты также могут иметь фазовую составляющую опорного сигнала, которая может быть использована для упорядочения LO.
Опорные сигналы времени и/или частоты включают, без ограничения, сигнал от источника GPS, математическую модель LO, сигнал от сетевого источника опорных сигналов времени и/или частоты. В некоторых примерах воплощения опорный сигнал точного времени и/или частоты получен в сетевом узле от внешнего источника, как в случае с сигналом от источника GPS, сигналом от сетевого источника опорных сигналов и/или частоты. В некоторых примерах воплощения опорный сигнал точного времени и/или частоты может быть сформирован или храниться на сетевом узле, в частности, в случае модели LO. Однако эти примеры не предназначены ограничить изобретение. Например, модель LO может быть сформирована и/или храниться на другом сетевом узле, и полученный опорный сигнал точного времени и/или частоты, основанный на этой модели, затем передается сетевому узлу с LO. Источники опорных сигналов времени и/или частоты могут передать информацию о времени, информацию о частоте, информацию о фазе или их комбинации другому устройству через свободное пространство (например, по радиоканалу), по электрическому проводнику, по оптическому проводнику или некоторой их комбинации между двумя сетевыми узлами, которые имеют один или несколько каналов связи.
Еще одним примером источника опорного сигнала является компенсированный источник опорного сигнала, в котором точность и стабильность частоты и/или фазы в сетевом источнике характеризуются относительно доступным известным точным источником, таким как сигнал GPS. Компенсация одного или нескольких таких характерных источников делает их приемлемой альтернативой первичного источника опорного сигнала.
Примером компенсации источника опорного сигнала является использование синхронного тактового сигнала Ethernet, в котором нет информации о фазе, но частота очень точна и стабильна. Сравнение такого источника с источником сигнала GPS позволяет определить информацию о фазе относительно опорного сигнала GPS, и в результате тактовый сигнал синхронного Ethernet может быть откалиброван и использован для синхронизации.
Примером сигнала от сетевого источника опорного сигнала времени является хронирующий сигнал от IEEE1588, включенного в сетевой узел. Примером сигнала от сетевого источника опорного сигнала частоты является сигнал частоты от синхронного Ethernet и/или ECS (тактовая синхронизация Ethernet) с поддержкой сетевого узла. Альтернативно, сигнал от сетевого источника опорного сигнала частоты является сигналом адаптивного восстановления синхронизации (ACR), поддерживающей сетевой узел.
В некоторых примерах воплощения LO может быть упорядочен на основе информации о времени и/или частоте, полученной за период, в течение которого LO упорядочивается первичным источником опорного сигнала. Пример этого будет описан ниже.
В некоторых примерах воплощения изобретения упорядочение LO включает сравнение источника опорных сигналов времени и/или частоты, выбранного как первичный источник опорного сигнала с выхода LO, чтобы получить "поправочный коэффициент". Поправочный коэффициент затем может использоваться для исправления ошибки сдвига частоты в LO, выравнивая LO с первичным источником опорного сигнала. Сравнение первичного источника опорного сигнала с LO может быть выполнено на основе цикла. В некоторых примерах воплощения цикл составляет приблизительно одну секунду. Однако следует понимать, что примеры воплощения изобретения могут быть применены к системе, в которой время цикла меньше или больше 1 секунды. Кроме того, в некоторых примерах воплощения, время цикла может быть нерегулярным и изменяться от десятков секунд до нескольких минут.
LO может непрерывно упорядочиваться первичным источником опорного сигнала до тех пор, пока первичный источник опорного сигнала не становится недоступным. Когда первичный источник опорного сигнала становится недоступным, упорядочение LO может продолжаться, выбирая альтернативный источник опорного сигнала, как следующий наиболее точный источник опорного сигнала времени и/или частоты. Если и этот альтернативный источник опорного сигнала становится недоступным, LO может быть упорядочен со следующим наиболее точным и стабильным источником опорного сигнала времени и/или частоты и так далее, пока не станет использоваться наименее точный источник опорного сигнала.
Относительно терминологии вышеупомянутого описания отметим, что «точность» относится к статическому смещению частоты или фазы сигнала от целевого значения, а «стабильность» относится к изменению по времени от целевого значения.
В некоторых примерах воплощения, когда для упорядочения LO используется первичный источник опорного сигнала, определяется поправочный коэффициент для каждого альтернативного источника опорных сигналов. В некоторых примерах воплощения, когда для упорядочения LO используется первичный источник опорного сигнала, определяется поправочный коэффициент для каждого источника альтернативного опорного сигнала, выбранного из подмножества всех альтернативных источников опорных сигналов. В некоторых примерах воплощения поправочным коэффициентом для данного альтернативного ресурса является функция выхода LO, данного альтернативного ресурса и первичного источника опорного сигнала.
В некоторых примерах воплощения, когда имеется первичный источник опорного сигнала, поправочные коэффициенты, определенные для каждого из альтернативных источников опорных сигналов, сравниваются с поправочным коэффициентом, определенным на основе первичного источника опорного сигнала. Это сравнение поправочных коэффициентов может использоваться для определения упорядочения альтернативных источников опорных сигналов в диапазоне от наиболее точного/стабильного сигнала до наименее точного/стабильного сигнала относительно поправочного коэффициента, определенного на основе первичного источника опорного сигнала.
В некоторых примерах воплощения, определение упорядочения альтернативных источников опорных сигналов выполняется только в течение периода, когда первичный источник опорного сигнала доступен как наиболее точный источник опорного сигнала. В таком примере воплощения, когда первичный источник опорного сигнала становится недоступным, выбирается наиболее точный альтернативный источник опорного сигнала, и упорядочение оставшихся альтернативных источников опорных сигналов основано на периоде, когда первичный источник опорного сигнала был все еще доступен.
В некоторых примерах воплощения, определение поправочных коэффициентов и упорядочение альтернативных источников опорных сигналов выполняется в непрерывном режиме, независимо от того, какой источник опорного сигнала используется для упорядочения LO. В примере воплощения, где первичный источник опорного сигнала становится недоступным, для упорядочения LO выбирается наиболее точный альтернативный источник опорного сигнала, основанный на упорядочении, которое доступно в данный момент. Поправочный коэффициент для выбранного наиболее точного источника альтернативного опорного сигнала определяется в сравнении с выходом LO.
В некоторых примерах воплощения, когда первичный источник опорного сигнала недоступен, поправочные коэффициенты, определенные для каждого из альтернативных источников опорных сигналов, сравниваются с правильно выбранным поправочным коэффициентом наиболее точного источника альтернативного опорного сигнала. Это сравнение может использоваться для определения упорядочения альтернативных источников опорных сигналов от наиболее точного до наименее точного выбранного точного альтернативного источника опорного сигнала, используемого для упорядочения LO.
Как только упорядочение источников опорных сигналов было определено и был выбран наиболее точный доступный источник опорного сигнала, или первичный источник опорного сигнала, или альтернативный источник опорного сигнала, когда первичный источник опорного сигнала недоступен, LO упорядочивается на основе сигнала коррекции, полученного из выбранного наиболее точного доступного источника опорного сигнала.
В некоторых примерах воплощения упорядочение альтернативных источников опорных сигналов может изменяться с течением времени в зависимости от различных факторов, которые влияют на опорный сигнал точного времени и/или частоты, сформированный главными источниками опорного сигнала. Факторы могут включать, без ограничения, влияние окружающей среды, такое как погода и/или топология, факторы мобильности, факторы сигналов помех и/или надежности работы системы.
В некоторых примерах воплощения опорный сигнал частоты оценивается для использования в качестве опорного сигнала времени. Если частота опорного сигнала достаточно стабильна, то он может использоваться как хронирующий сигнал.
Пример способа, относящегося к некоторым примерам воплощения изобретения, будет теперь обсужден со ссылкой на блок-схему фигуры 1. Первая стадия 1-1 способа заключается в формировании гетеродином первого сигнала, содержащего информацию о времени, информацию о частоте, информацию о фазе или их комбинации.
Вторая стадия 1-2 включает получение, по меньшей мере, одного второго сигнала, содержащего информацию о времени, информацию о частоте, информацию о фазе или их комбинации. В некоторых примерах воплощения, по меньшей мере, один второй сигнал является более точным, чем первый сигнал. В некоторых примерах воплощения, прием, по меньшей мере, одного тактового сигнала может включать получение любого или некоторого количества тактовых сигналов GPS, сетевого хронирующего сигнала или сетевого сигнала частоты.
Третья стадия 1-3 включает определение точности, по меньшей мере, одного из двух вторых сигналов относительно второго сигнала, выделенного как наиболее точный сигнал, по меньшей мере, из двух вторых сигналов. В некоторых примерах воплощения определение точности, по меньшей мере, одного второго тактового сигнала включает определение точности сигналов времени и/или частоты, которые были переданы с внешнего устройства на устройство, содержащее LO, так же как сигналы времени и/или частоты, которые могут быть созданы в устройстве. Примером сигнала, который может быть создан в устройстве, является опорный сигнал точного времени и/или частоты, на основе модели LO, который сформирован или сохраняется в устройстве, или опорный сигнал точного времени и/или частоты, который сформирован или сохраняется на основе времени, в течение которого LO упорядочивается первичным источником опорного сигнала.
Четвертая стадия 1-4 включает упорядочение, по меньшей мере, двух вторых сигналов, от наиболее точного до наименее точного. Наиболее точный опорный сигнал точного времени и/или частоты определяется как первичный опорный сигнал, и другие сигналы времени и/или частоты упорядочиваются по методике, когда следующий наиболее точный сигнал выбирается для упорядочения LO, если первичный источник опорного сигнала становится недоступным.
В некоторых примерах воплощения первичный источник опорного сигнала выделяется до упорядочения сигналов точного времени и/или частоты, и альтернативные сигналы точного времени и/или частоты упорядочиваются от наиболее точного до наименее точного, где наиболее точный сигнал является наиболее точным после первичного опорного сигнала. В некоторых примерах воплощения первичный источник опорного сигнала назначается на основе известной производительности этого источника. Например, известно, что GPS имеет заданную точность, которая является функцией системы. Следовательно, если GPS доступен, неопределенность относительно исходной стабильности не рассматривается и источник может определяться как основной, если нет никакого другого доступного источника, который имеет лучшую начальную стабильность.
Упорядочение вторичных опорных сигналов относительно первичного источника опорного сигнала зависит от выбора первичного источника опорного сигнала. В некоторых примерах воплощения «вторичный первичный источник опорного сигнала» может быть идентифицирован так, что если первичный источник опорного сигнала недоступен, вторичный первичный источник опорного сигнала используется в качестве первичного источника опорного сигнала. Производительность источника, который рассматривается как возможный вторичный первичный источник опорного сигнала, должна быть предопределенной, чтобы гарантировать, что источник является подходящим для системы при его использовании в качестве первичного источника опорного сигнала, если исходный первичный источник опорного сигнала был потерян.
Пятая стадия 1-5 включает упорядочение LO для исправления ошибки сдвига LO относительно наиболее точного второго сигнала, который доступен на основе упорядочения, по меньшей мере, двух вторых сигналов точного времени и/или частоты.
В некоторых примерах воплощения способ дополнительно содержит устройство, в котором LO управляет получением информации, отправленной, по меньшей мере, одним из главных источников опорного сигнала, имеющих отношение к доступности, по меньшей мере, к одному источнику главного опорного сигнала, чтобы обеспечить указанный второй сигнал. В некоторых примерах воплощения способ может включить устройство обнаружения доступности, по меньшей мере, одного источника, который обеспечивает опорный сигнал точного времени и/или частоты. Если устройство в состоянии определить доступность источников, это может помочь в выборе соответствующего второго сигнала, особенно, если известно, когда основной сигнал может стать недоступным.
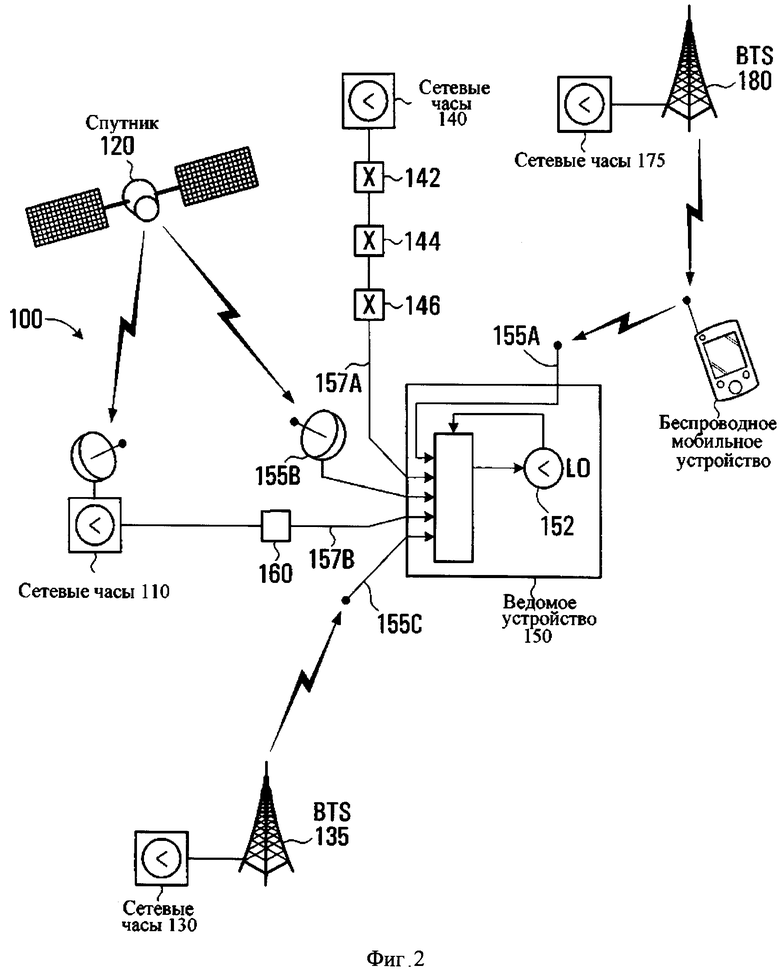
Система, сконфигурированная для реализации способа согласно настоящему изобретению, будет теперь описана со ссылкой на фигуру 2. Система 100 включает управляемое устройство 150 и множество главных источников опорного сигнала.
Главный источник опорного сигнала может быть источником опорного сигнала точного времени или источником опорного сигнала частоты, любой из которых может включать фазовую составляющую в исходном сигнале. На фигуре 2, первым главным источником опорного сигнала являются сетевые часы 110, которые получают опорный сигнал точного времени и/или частоты от спутника 120 и затем передают опорный сигнал точного времени и/или частоты управляемому устройству 150 через сетевой узел 160. Вторым главным источником опорного сигнала является спутник 120, который обеспечивает информацию точного времени от GPS непосредственно для управляемого устройства 150. В некоторых примерах воплощения, может быть доступно больше одного спутника, чтобы обеспечить сигналы точного времени и/или частоты. Третьим главным источником опорного сигнала являются сетевые часы 140, которые передают опорный сигнал точного времени и/или частоты управляемому устройству 150 через сетевые узлы 142, 144, 146. Четвертым главным источником опорного сигнала являются сетевые часы 130, которые передают опорный сигнал управляемому устройству 150 через базовую станцию (BTS) 135. Пятым главным источником опорного сигнала являются сетевые часы 175, которые передают опорный сигнал управляемому устройству 150 через BTS 180, используя беспроводное мобильное устройство 170 в качестве ретранслятора.
Из различных основных источников опорных сигналов, из которых управляемое устройство может получить опорный сигнал точного времени и/или частоты, в конечном счете, некоторые из них могут быть получены из одного и того же источника, но в зависимости от его доступности в конкретный момент времени не все могут быть доступны одновременно. Например, спутник в 120 передает информацию о времени и/или частоте непосредственно управляемому устройству 150 и через сетевой узел, который содержит сетевые часы 110. В установленное время из-за ненастной погоды в непосредственной близости от управляемого устройства 150, это управляемое устройство, возможно, не в состоянии получить информацию о времени от спутника 120. Однако способность узла, содержащего сетевые часы 110, получать информацию со спутника 120, не зависит от плохой погоды. Сетевые часы 110 могут получать информацию о времени со спутника 120 и передать опорный сигнал точного времени и/или частоты управляемому устройству 150.
В некоторых примерах воплощения различные источники основного тактового сигнала могут состоять из несвязанных, т.е. не синхронизированных сетевых часов.
Хотя беспроводное мобильное устройство показано на фигуре 2 как ретрансляционное устройство, следует понимать, что любые устройства за пределами беспроводных мобильных устройств могут действовать как ретрансляторы. В альтернативной реализации ретранслятором является упрощенная станция BTS, предназначенная для передачи радиосигналов в областях, где отсутствуют соответствующие BTS, таких как сельские районы, или в городских районах с высотными зданиями, которые могут вызвать серьезные проблемы затухания сигнала. Например, первое управляемое устройство, имеющее первый LO, может получить информацию о времени и/или частоте для упорядочения первого LO от второго управляемого устройства, имеющего второй LO, в котором второй LO упорядочивается главным источником опорного сигнала.
Управляемое устройство 150 используется для получения сигналов точного времени и/или частоты из одного или нескольких главных источников опорного сигнала 110, 120, 130, 140, 175. Как обсуждено выше, в некоторых технических решениях управляемое устройство 150 имеет LO 152, который имеет меньшую точность по сравнению с другими главными источниками опорного сигнала, а в других примерах воплощения LO 152, имеет большую точность относительно одного или нескольких других главных источников опорного сигнала, если соблюдены обсужденные выше условия относительно характеристики зависимости от точности и стабильности частоты.
Управляемое устройство 150 фигуры 2 имеет три антенны 155А, 155В, 155С для приема радиосигналов от одного или нескольких главных источников опорного сигнала. Антенны 155А и 155С получают радиосигналы от беспроводного мобильного устройства 170 и BTS 135, соответственно, а антенна 155В получает радиосигналы со спутника 120. Число антенн, которые включает управляемое устройство, определяется для данного конкретного местоположения. Антенна может использоваться для получения сигналов от более чем одного главного источника опорного сигнала.
В некоторых примерах воплощения управляемое устройство 150 соединяется с одним или несколькими главными источниками опорного сигнала через проводной канал. Управляемое устройство 150 фигуры 2 соединено с сетевыми часами 140 через сетевые узлы 142, 144, 146 проводным соединением. Последнее соединение между сетевым узлом 146 и управляемым устройством 150 обозначено как проводное соединение 157А. Управляемое устройство 150 фигуры 2 также соединено с сетевыми часами 110 через сетевые узлы 160 проводным соединением. Последнее соединение между сетевым узлом 160 и управляемым устройством 150 обозначено как проводное соединение 157В. Число соединений, соединенных проводом с сетевыми часами, зависит от конкретного местоположения. Кроме того, число транзитных участков между сетевыми часами и управляемым устройством через сетевые узлы также зависит от конкретного местоположения.
В некоторых примерах воплощения соединение между сетевыми часами и управляемым устройством может быть сочетанием проводных и беспроводных каналов.
На фигуре 2 представлено только одно управляемое устройство 150 в системе 100, но следует понимать, что сеть может иметь более одного управляемого устройства описанного здесь типа. Факторы, которые могут влиять на число ведомых устройств в сети, включают, без ограничения, размер сети, географическое местоположение, охватываемое сетью, и требования мощности управляемого устройства и/или основных источников ресурса.
В некоторых примерах воплощения управляемое устройство получает опорный сигнал точного времени и/или частоты от сетевых часов, которые находятся в непосредственной близости от управляемого устройства. В некоторых примерах воплощения управляемое устройство может получать опорный сигнал точного времени и/или частоты от сетевых часов, которые не находятся в непосредственной близости от управляемого устройства, и опорный сигнал точного времени и/или частота должны быть переданы одному или нескольким сетевым узлам.
Фигура 2 иллюстрирует примерный сетевой узел 160, через который сетевые часы 110 посылают опорный сигнал точного времени и/или частоты на управляемое устройство 150. В зависимости от расстояния между сетевыми часами 110 и управляемым устройством 150, это может привести к задержке сетевого опорного сигнала времени и/или частоты, передаваемого на управляемое устройство 150. Сетевая задержка может быть компенсирована в различной степени, но такая задержка может привести к снижению точности сигнала точного времени и/или частоты из данного главного источника опорного сигнала, по сравнению с другими главными источниками опорного сигнала, или сигнал точного времени и/или частоты, передаваемый из данного главного источника опорного сигнала, становится ненадежным или потенциально недоступным.
В некоторых примерах воплощения управляемое устройство может получить сигнал точного времени и/или частоты от источника GPS, который принимается не непосредственно со спутника, но от сетевого узла, который используется для получения сигнала точного времени и/или частоты со спутника и для передачи этого сигнала по сети или по проводному или беспроводному соединению управляемому устройству. Фигура 2 иллюстрирует пример сетевых часов 110, получающих информацию о времени и/или частоте со спутника 120 и посылающих сигнал точного времени и/или частоты на управляемое устройство 150. Сетевой узел может находиться в непосредственной близости от управляемого устройства или на расстоянии от него. В ситуации, когда сетевой узел не находится в непосредственной близости от управляемого устройства, может произойти задержка получения сигнала точного времени и/или частоты.
В некоторых примерах воплощения управляемое устройство может получить сигнал точного времени и/или частоты из основного источника ресурса, который передает сигналы управляемому устройству по «эфирному» интерфейсу (ОТА). Фигура 2 иллюстрирует пример соединения ОТА между управляемым устройством 150 и BTS 135. Главный источник опорного сигнала, сетевые часы 130 могут быть связаны с BTS 135 проводным или беспроводным соединением.
В некоторых примерах воплощения управляемое устройство может получать сигнал точного времени и/или частоты через ретранслятор. Как показано на фигуре 2, BTS 180 обеспечивает сигнал точного времени и/или частоты от сетевых часов 175 через беспроводное мобильное устройство 170. BTS 180 может находится в непосредственной близости от управляемого устройства 150 или на расстоянии от него. В ситуации, когда BTS 180 и/или беспроводное мобильное устройство 170 не находится в непосредственной близости от управляемого устройства 150, может произойти задержка в получении сигнала точного времени и/или частоты, которая должна быть компенсирована по прибытии сигнала в управляемое устройство 150.
Типы главных источников опорного сигнала не ограничиваются только описанными здесь устройствами со ссылкой на фигуру 2.
Описанные источники используются просто в качестве примерных типов источников источника опорных сигналов времени и/или частоты. Другие типы главных источников опорного сигнала, которые обеспечивают сигналы точного времени и сигналы частоты для управляемого устройства, могут включать сетевое распределение: сигналы атомных часов, используя рубидиевые или цезиевые стандарты, сигналы системы дальней радионавигации (LORAN) и сигналы синхронизации, присутствующие в сигналах телевещания.
Фигура 2 иллюстрирует различные типы источников опорного сигнала и различные типы соединений между источниками опорного сигнала и управляемым устройством. Реализации примеров воплощения изобретения являются конкретными реализациями и могут включать типы источников опорного сигнала и соединений, описанных со ссылкой на фигуру 2, или другими типами источников опорного сигнала и соединений, описанных здесь.
В некоторых примерах воплощения сетевые часы могут передавать сигнал точного времени и/или частоты управляемому устройству на физическом уровне, например на уровне реализации 1. В некоторых примеры воплощения, реализация физического уровня выполняется в соответствии со стандартом синхронного Ethernet (SyncE). В некоторых примерах воплощения, в которых передача осуществляется на уровне реализации 1, сетевые узлы между главным источником опорного сигнала и управляемым устройством могут использовать исходное время главного опорного сигнала и/или сигнал частоты через сетевой узел. На фигуре 2, например, сетевые узлы 142, 144, 146 могут использовать сетевой тактовый сигнал от сетевых часов 140, чтобы синхронизировать данные через соответствующие сетевые узлы на физическом уровне.
В некоторых примерах воплощения, сетевые часы могут передавать сигналы точного времени и/или частоты управляемому устройству на уровне программного обеспечения, например на уровне реализации 2. В конкретном примере реализации уровня программного обеспечения, пакеты данных, переданные главным источником опорного сигнала управляемому устройству, кодируются информацией о времени и дате, которая позволяет управляемому устройству определить задержку в сети и определить сигнал точного времени и/или частоты, используемый для упорядочения управляемого устройства. В некоторых примерах воплощения реализация уровня программного обеспечения выполняется в соответствии со стандартом IEEE 1588 по протоколу передачи частоты/времени. Снова обратимся к фигуре 2, где сетевые часы 130 передают сигнал точного времени и/или частоты на BTS 135, используя уровень реализации 2, и BTS 135 передает этот сигнал управляемому устройству, 150 используя уровень реализации 2.
Хотя множество схем передачи имеют уровень 1 и уровень 2, между главным источником опорного сигнала и управляемым устройством, описанным выше, это нельзя рассматривать как полный список схем, по которым управляемое устройство может получить сигнал точного времени и/или частоты от главных источников опорного сигнала. Рассматриваются другие типы схем передачи.
В некоторых примерах воплощения управляемое устройство может быть частью BTS в сети беспроводной связи. В некоторых примерах воплощения управляемое устройство может быть частью сетевого узла, такого как ретранслятор в сети беспроводной связи. В некоторых примерах воплощения управляемое устройство может быть частью корпоративной сети. В некоторых примерах воплощения управляемое устройство может быть беспроводным терминалом в сети беспроводной связи, например сотовым телефоном, или компьютером, или персональным цифровым помощником (PDA), функционирующим с помощью беспроводных технологий. В целом, управляемое устройство может быть частью сетевого элемента любого типа или расположено в непосредственной близости от сети, в которой сетевой элемент может использовать местный источник синхронизации, такой как LO. В некоторых примерах воплощения использование LO, который может быть упорядочен вышеописанным способом, может включать использование гетеродина менее дорогого типа в сетевом элементе, что соответственно уменьшает стоимость сетевого элемента.
Пример управляемого устройства типа, представленного на фигуре 2, будет теперь подробно описан со ссылкой на фигуру 3. Фигура 3 иллюстрирует управляемое устройство 200, имеющее множество входов 210, 220, 230, 240 для получения сигналов точного времени и/или частоты из множества главных источников опорного сигнала (не показан). Управляемое устройство также включает блок присвоения приоритетов 250, который определяет сигнал коррекции одного или нескольких сигналов точного времени и/или частоты, полученных на входах 210, 220, 230, 240, располагает по приоритетам сигналы коррекции от наиболее точного до наименее точного и обеспечивает наиболее точный опорный сигнал гетеродина (LO) для упорядочения LO и уменьшения ошибки сдвига в LO, которая, возможно, произошла при прошлом упорядочивании LO. Работа блока присвоения приоритетов 250 будет описана ниже более подробно. Выход 298 блока присвоения приоритетов 250 передается на вход LO 260. Выход 262 из LO 260 также передается на вход блока присвоения приоритетов 250, чтобы помочь в определении сигнала коррекции от одного или нескольких входов.
Первый вход 210 блока присвоения приоритетов 250 предназначен для первичного источника опорного сигнала. Первичный источник опорного сигнала выбирается, по меньшей мере, на основе одного критерия, который указывает, что он обеспечивает наиболее точный сигнал точного времени и/или сигнал частоты. Остальные входы предназначены для альтернативного источника главного источника опорных сигналов и/или частоты, а именно вход 220 для альтернативного источника опорного сигнала No.1, вход 230 для альтернативного источника опорного сигнала No.2 и вход 240 для альтернативного источника опорного сигнала No.3. Выход 262 гетеродина подается обратно на блок присвоения приоритетов 250. Хотя на фигуре 3 показаны четыре входа, это просто один из примеров воплощения. Число входов для получения сигналов от главных источников опорного сигнала зависит от конкретного случая реализации изобретения.
В некоторых примерах воплощения первичный источник опорного сигнала и альтернативные источники опорных сигналов могут быть выбраны из ряда сигналов точного времени и/или частоты из главных источников опорного сигнала включая, по меньшей мере, сигнал GPS и, по меньшей мере, один сетевой тактовый сигнал. В некоторых примерах воплощения сигнал точного времени и/или частоты может быть сформирован на основе модели LO. В некоторых примерах воплощения сигнал, сформированный основе модели LO, может быть выбран для использования либо в качестве первичного источника опорного сигнала, либо в качестве альтернативного опорного сигнала. В некоторых примерах воплощения, сигнал точного времени и/или частоты формируется за период, в течение которого LO упорядочивается первичным источником опорного сигнала. Конкретный пример, не ограничивающий изобретение, состоит в том, что когда в течение отрезка времени определяется, что первичный источник опорного сигнала доступен и используется для упорядочения LO, имеется, в основном, линейное соотношение между величиной отклонения LO от первичного источника опорного сигнала с течением времени, и когда первичный источник опорного сигнала недоступен, LO может быть упорядочен на основе определенного линейного соотношения и количеств времени, после которого LO был упорядочен последний раз.
Сигнал главного опорного источника сигнала может быть первичным источником опорного сигнала внутри управляемого устройства. В некоторых примерах воплощения управляемое устройство может быть сконфигурировано на такое определение с последующим получением опорного сигнала и до входов источника сигналов, показанных на фигуре 3. В некоторых примерах воплощения определение того, какой источник опорного сигнала является первичным источником опорного сигнала, основано на некотором сравнении множества сигналов, полученных для определения, какой главный источник опорного сигнала обеспечивает наиболее точный сигнал точного времени и/или сигнал частоты. В некоторых примерах воплощения определение того, какой главный источник опорного сигнала является первичным источником опорного сигнала, основано на выборе сигнала по умолчанию из определенного главного источника опорного сигнала. В некоторых примерах воплощения определение того, какой главный источник опорного сигнала является первичным источником опорного сигнала, основано на выборе из списка упорядоченных главных источников опорного сигнала. Пример выбора определенного главного источника опорного сигнала как первичного источника опорного сигнала связан с выбором главного источника опорного сигнала со спутника GPS как первичного источника опорного сигнала. Пример выбора основного источника из списка упорядоченных главных источников опорного сигнала включает выбор первичного источника опорного сигнала из упорядоченного списка, включая (1) главный источник ресурса GPS, (2) сетевой источник ресурса опорных сигналов и (3) модель LO. Первый выбор первичного источника опорного сигнала, основанный на упорядочивании, был бы источником GPS. Однако если GPS недоступна, источник сетевых опорных сигналов может быть выбран как первичный опорный сигнал и так далее.
Как показано на фигуре 3, в управляемом устройстве 200, первичный источник опорного сигнала, полученный на входе 210, используется для первого генератора сигнала коррекции 270. Выход 262 тактового сигнала также используется для первого генератора сигнала коррекции 270. Выход первого генератора сигнала коррекции 270 является сигналом коррекции 271, который может использоваться для упорядочения LO 260 относительно первичного источника опорного сигнала. Альтернативный источник опорного сигнала No.1, полученный на входе 220, предназначен для второго генератора сигнала коррекции 272. Выход 262 тактового сигнала также предназначен для второго генератора сигнала коррекции 272. аналогичная связь показана для альтернативного источника опорного сигнала No.2, полученного на входе 230, и альтернативного источника опорного сигнала No.3, полученного на входе 240 через третий и четвертый генераторы сигнала коррекции 274 и 276, соответственно.
Сигнал коррекции 273 от второго генератора сигнала коррекции 272 предназначен для первого сумматора 282. Сигнал коррекции 271 от первого генератора сигнала коррекции 270 также предназначен для первого сумматора 282. Выход 292 первого сумматора 282 является разницей между сигналом коррекции первичного источника опорного сигнала 271 и альтернативного источника опорного сигнала No.1 коррекции 273. Сигнал коррекции 275 от третьего генератора сигнала коррекции 274 используется для второго сумматора 284. Сигнал коррекции 271 от первого генератора сигнала коррекции 270 также используется для второго сумматора 284. Выход 294 второго сумматора 284 является разницей между сигналом коррекции первичного источника опорного сигнала 271 и альтернативного источника опорного сигнала No.2 из сигнала коррекции 275. Альтернативный источник опорного сигнала No.3 коррекции 277 обрабатывается аналогично альтернативным источникам опорного сигнала No.1 и No.2, используя сумматор 286.
Выходы сумматоров 282, 284, 286 наряду с сигналом коррекции первичного источника опорного сигнала 271 используются для селектора сигнала коррекции 290. Селектор сигнала коррекции 290 затем упорядочивает различные сигналы коррекции с точки зрения от наиболее точного до наименее точного сигнала относительно опорного сигнала первичного источника.
Селектор сигнала коррекции 290 затем выбирает наиболее точный сигнал коррекции, который доступен в данный момент. Когда первичный источник опорного сигнала доступен, используется сигнал коррекции на основе первичного источника опорного сигнала. Если первичный источник опорного сигнала недоступен, выбирается следующий наиболее точный сигнал коррекции, основанный на упорядочении, выполненном селектором сигнала коррекции на основе доступного сигнала.
В некоторых примерах воплощения, если первичный источник опорного сигнала недоступен, то следующий наиболее точный опорный сигнал альтернативного источника может быть подан на вход 210 так, что сигнал коррекции 271 является результатом сравнения между следующим наиболее точным альтернативным опорным сигналом и выходом LO. Сигнал коррекции 271 затем может быть сравнен с другими альтернативными сигналами коррекции, как обсуждено выше, и сигналы коррекции могут быть соответственно упорядочены относительно следующего наиболее точного альтернативного источника опорного сигнала.
В альтернативном примере воплощения вместо следующего наиболее точного опорного сигнала альтернативного источника, подаваемого на вход 210, альтернативные опорные сигналы сохраняются на входах, показанных на фигуре 3, и выходы корреляторов сигнала 272, 274, 276 используются непосредственно для селектора сигнала коррекции 290 и для сумматоров 282, 284, 286 соответственно так, что селектор сигнала коррекции 290 может выбрать соответствующий сигнал коррекции 298 с выходов корреляторов сигнала 272, 274, 276 на основе выбора, сделанного при упорядочении выходов сумматоров 282, 284,286, как описано выше.
Фигура 3 является примером реализации блока присвоения приоритетов, но в рамках изобретения рассматриваются и другие физические реализации, которые обеспечивают результат упорядочения множества альтернативных источников и выбор следующего наиболее точного альтернативного источника опорного сигнала, когда первичный источник опорного сигнала недоступен.
Блок присвоения приоритетов 250 может быть реализован в виде программного обеспечения, аппаратных средств или некоторой их комбинации. Например, в реализации программного обеспечения различные процессы сравнения сигналов реализуются как один или несколько программных модулей, и функции упорядочения реализуются как другой модуль. В аппаратной реализации различные функции сравнения сигналов, обработки и упорядочения могут быть реализованы, используя, например, ASIC или FPGA.
Улучшение времени удержания
В другом аспекте изобретения, когда главный источник опорного сигнала становится недоступным, вводится состояние удержания, в котором предпринимается попытка поддержания временной синхронизации и/или частотной синтонизации LO на основе модели поведения LO по экологическим параметрам, таким как температура, время, напряжение питания и т.д. Проблема с состоянием удержания состоит в том, что допустимая продолжительность удержания ограничивается точностью используемой модели удержания и стабильностью LO. В некоторых примерах воплощения состояние удержания может иметь место, когда другие внешние источники главного опорного сигнала доступны для упорядочения LO или когда внутренний источник опорного сигнала, который является моделью LO, используется для упорядочения источника.
В целом, каждый раз, когда повторно вводится главный источник опорного сигнала, который до этого был недоступен, получается больше информации о точности времени/частоты и/или стабильности LO. Однако в контексте расположенного по приоритетам списка основных и альтернативных источников опорного сигнала типа описанных выше, каждый раз извлекается источник опорного сигнала, который считается более точным, чем источник, который в настоящий момент доступен для упорядочения LO; затем можно получить больше информации о текущей точности LO. Когда источник опорного сигнала, имеющий улучшенную точность, становится доступным, ошибка сдвига, которая, возможно, накопилась во время удержания, может быть исправлена.
Однако в некоторых ситуациях, когда главный источник опорного сигнала становится доступен после периода недоступности, главный источник опорного сигнала становится недоступен снова прежде, чем главный первичный источник источника опорного сигнала сможет использоваться для упорядочения LO в непрерывном режиме. Сигнал точного времени и/или частоты, восстановленный в течение временной доступности главного источника опорного сигнала, может использоваться для улучшения синхронизации и/или синтонизации LO относительно временной доступности главного источника опорного сигнала, чтобы уменьшить ошибки сдвига.
В устройстве без возможности использовать временную доступность первичного источника опорного сигнала для исправления ошибки сдвига, на основании ограниченной доступности главного источника опорного сигнала, как описано здесь, LO может остаться в состоянии удержания. Например, если главный источник опорного сигнала не доступен в течение предопределенного промежутка времени, например отрезка времени, в котором главный источник первичного источника опорного сигнала используется для упорядочения LO в непрерывном режиме, устройство, содержащее LO, не исправляет ошибки сдвига, на основе временной доступности главного источника опорного сигнала. Увеличенная продолжительность удержания может быть вредной для синхронизации и/или синтонизации устройства.
Результат исправления ошибки сдвига на основе временной доступности главного источника опорного сигнала состоит в том, что общая продолжительность удержания, которая выражается временем, в течение которого никакой главный источник опорного сигнала недоступен для достаточно длительной продолжительности, непрерывно используемой для упорядочения LO, может быть более длительной, чем временная доступность, и не могла бы использоваться для исправления ошибки сдвига. В таком случае время и/или частота сигнала главного источника опорного сигнала, который является временно доступным, вытекает из ошибки сдвига времени и/или частоты уменьшаемого LO. LO должен быть лучше выровнен относительно главного источника опорного сигнала, чем в случае, когда LO оставили в состоянии удержания, и не упорядочивается информацией, полученной в течение временной доступности главного источника опорного сигнала.
В некоторых примерах воплощения устройство может получить сигнал точного времени и/или частоты только из единственного главного источника опорного сигнала, и когда главный источникм опорного сигнала недоступен, устройство входит в состояние удержания, в котором предпринимается попытка поддержания стабильности и синтонизации LO.
В некоторых примерах воплощения, устройство может получить сигналы точного времени и/или частоты более чем из одного главного источника опорного сигнала, которые упорядочены в диапазоне от наиболее точного до наименее точного сигнала. Когда первичный источник опорного сигнала недоступен, вводится состояние удержания, во время которого для упорядочения LO могут использоваться, по меньшей мере, частично менее точные, источники опорного сигнала.
Если главный источник опорного сигнала становится недоступен после того, как ошибка сдвига была уменьшена, приводя LO в синхронизацию и/или синтонизацию относительно информации, полученной во время временной доступности главного источника опорного сигнала, устройство возвращается к состоянию удержания.
Некоторые примеры воплощения изобретения могут использоваться для реализации модуля для использования в сетевом узле, чтобы уменьшить стоимость, связанную с синхронизацией и/или синтонизацией сетевого узла. Сетевой узел может быть, например, базовой станцией или ретранслятором в сети связи или сетевым узлом в сети предприятия. Вообще говоря, модуль может быть частью сетевого узла любого типа или расположен в непосредственной близости от сетевого узла, который может использовать местный источник синхронизации, такой как LO.
Схема конечного состояния, относящаяся к некоторым примерам воплощения изобретения, описывается ниже со ссылкой на фигуру 4. Первое состояние является состоянием, в котором синхронизация по времени или синтонизация по частоте LO может сравниваться с главным источником опорного сигнала. Он может быть единственным главным источником опорного сигнала, если для упорядочения LO используется только один источник опорного сигнала, или первичным главным источником опорного сигнала, определяемым как наиболее точный источник, если доступно множество главных источников опорного сигнала. Как показано на фигуре 4, он "захвачен главным источником опорного сигнала" 410.
Второе состояние является состоянием, в котором, если главный источник опорного сигнала по некоторым причинам становится недоступным, предпринимается попытка поддержки синхронизации и синтонизации LO на основе модели поведения LO по экологическим параметрам, таким как температура, время и напряжение питания. В некоторых примерах воплощения, попытка поддержать синхронизацию и синтонизацию LO основана на использовании альтернативного источника опорного сигнала, когда главный источник опорного сигнала недоступен, а источники альтернативного источника опорного сигнала доступны. Это показано на фигуре 4 как "состояние удержания" 420.
Недоступность главного источника опорного сигнала, приводящего к перемещению в "состоянию удержания" 420, обозначено на фигуре 4 как "потеря блокировки главного опорного сигнала" 415.
Третье состояние является состоянием, в котором, если главный источник опорного сигнала становится доступен, когда он находится в "состоянии удержания" 420, предпринимается попытка обновления синхронизации и/или синтонизации LO относительно главного источника опорного сигнала. Это показано на фигуре 4 как "состояние восстановления главного опорного сигнала" 430.
Состояние доступности главного источника опорного сигнала после состояния недоступности благодаря перемещению в "состояние восстановления главного опорного сигнала" 430 показано как "доступность главного опорного сигнала" 425.
Четвертое состояние является состоянием, в котором, если главный источник опорного сигнала становится недоступен во время "восстановления состояния главного источника опорного сигнала" 430, информация о синхронизации и/или синтонизации, накопленная во время "восстановления состояния главного источника опорного сигнала" 430 используется, чтобы улучшить синхронизацию и/или синтонизацию LO относительно временно восстановленного главного источника опорного сигнала. Это показано как "восстановление времени накопления состояния ошибки " 440. Большая ошибка сдвига времени и/или частоты может быть накоплена во время удержания в зависимости от продолжительности удержания. Такая ошибка может быть уменьшена сигналом времени и/или частоты, полученным от временно доступного главного источника опорного сигнала, особенно по сравнению с не исправленной ошибкой на основе временной доступности главного источника опорного сигнала с увеличением этой ошибки вместе с увеличением продолжительности удержания.
Главный источник опорного сигнала снова становится недоступным после того, как он был временно доступен в результате перемещения в "восстановленное состояние накопления ошибки времени" 440, что обозначается как состояние 435 "главный источник опорного сигнала недоступен".
После того как совокупная ошибка сдвига была исправлена или, по меньшей мере, уменьшена на основе временной доступности главного источника опорного сигнала в "восстановленном состоянии накопления ошибки времени" 440, управление LO возвращается в "состояние удержания" 420. Возврат "состояния удержания" 420 из "восстановленного состояния накопления ошибки времени" 440 обозначен на фигуре 4 как "полное восстановление" 465.
Если главный источник опорного сигнала становится доступен во время "восстановления состояния накопления ошибки времени" 440, это приводит к возврату в "восстановление состояния главного источника опорного сигнала" 430. Главный источник опорного сигнала, который снова становится доступен во время "восстановления состояния накопления ошибки времени" 440, обозначается как "доступный главный источник опорного сигнала" 455.
После того как "состояние главного источника опорного сигнала" 430 успешно восстановлено главным источником опорного сигнала и компенсировало любую ошибку сдвига времени и/или частоты, управление LO возвращается к "привязке к состоянию главного источника опорного сигнала" 410. В некоторых примерах воплощения фазовая ошибка между LO и главным источником опорного сигнала должна быть менее 200 наносекунд до момента, когда разрешается возврат к "привязке к состоянию главного источника опорного сигнала" 410. В более широком аспекте может быть установлена другая реализация определенных критериев для возврата к "привязке к состоянию главного источника опорного сигнала" 410.
Возврат к "привязке к состоянию главного источника опорного сигнала" 410 из восстановленного "состояния главного источника опорного сигнала" 430 обозначен как "полное восстановление главного источника опорного сигнала" 475.
Некоторые примеры воплощения изобретения обеспечивают конечное состояние машинного алгоритма, который отслеживает различные состояния работы модуля с целью поддержания синхронизации и/или синтонизации LO относительно главного источника опорного сигнала.
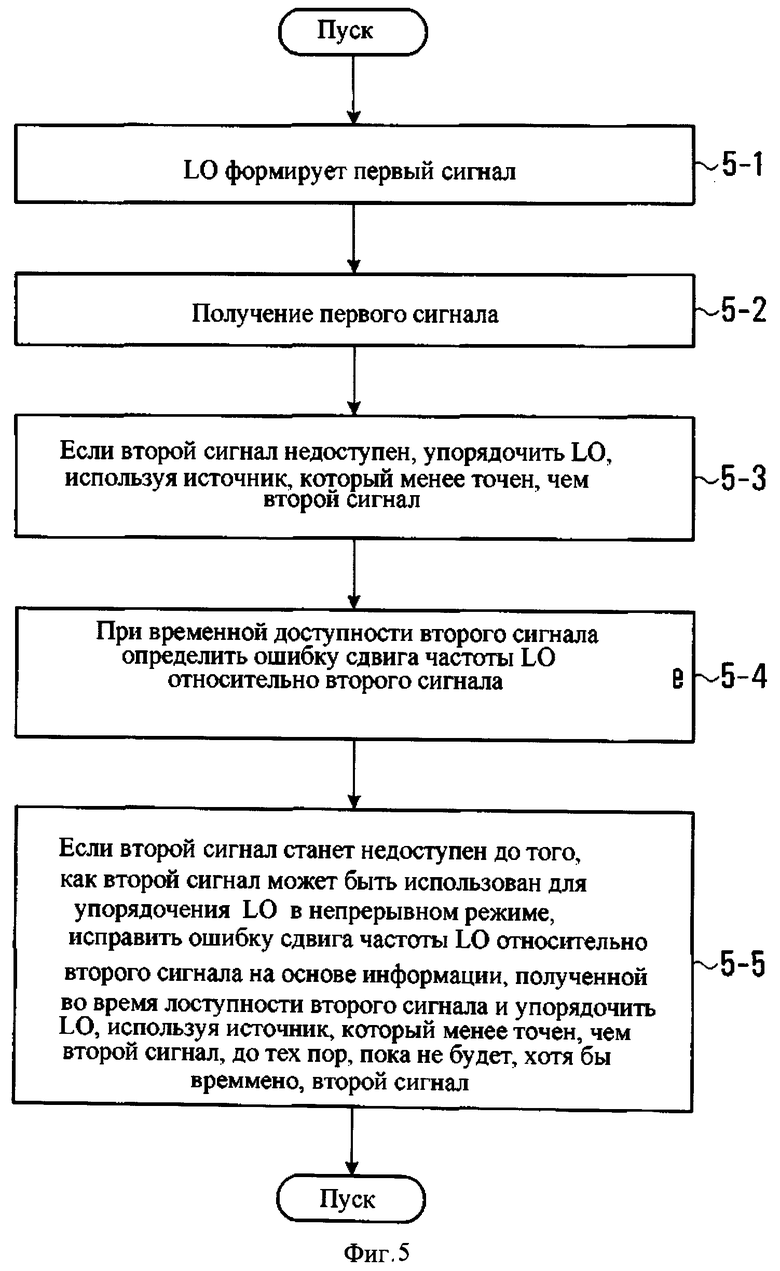
Некоторые примеры воплощения изобретения способа обсуждается ниже со ссылкой на блок-схему фигуры 5. Первая стадия 5-1 способа включает запуск гетеродина (LO), формирующего первый сигнал, который включает один из сегментов информации о времени, информацию о частоте, информацию о фазе или их комбинацию.
Вторая стадия 5-2 способа включает получение, по меньшей мере, одного второго сигнала, который содержит один из сегментов информации о времени, информацию о частоте, информацию о фазе или их комбинацию. В некоторых примерах воплощения, по меньшей мере, один второй сигнал более точен и/или более стабилен, чем первый сигнал. В некоторых примерах воплощения, по меньшей мере, один второй сигнал может быть менее точен/менее стабилен, чем сигнал LO, например, если соблюдены условия для точной характеристики точности и стабильности источника, как описано выше. По меньшей мере, один второй сигнал может включать, по меньшей мере, один сигнал от источника GPS, математической модели LO, сигнал от сетевого источника опорных сигналов и/или сигнал от сетевого источника опорного сигнала частоты. В некоторых примерах воплощения, по меньшей мере, один второй сигнал формируется в сетевом узле, включая LO от внешнего источника, например в случае с сигналом от источника GPS. В некоторых примерах воплощения, по меньшей мере, один второй сигнал может быть сформирован или храниться на сетевом узле модели LO.
Если второй сигнал недоступен для упорядочения LO, третья стадия 5-3 включает упорядочение LO, используя источник, который имеет меньшую точность, чем второй сигнал.
Четвертая стадия 5-4 включает условие временной доступности второго сигнала, в течение которого определяется ошибка сдвига LO относительно второго сигнала, который стал, по меньшей мере, временно доступным.
Если второй сигнал становится недоступным прежде, чем устройство будет использовать второй сигнал для упорядочения LO в непрерывном режиме, выполняется пятая стадия 5-5, которая включает исправление ошибки сдвига LO относительно второго сигнала, на основе информации, полученной во время временной доступности второго сигнала, и упорядочение LO, используя источник, который менее точен, чем второй сигнал, до тех пор, пока второй сигнал становятся, по меньшей мере, временно доступен в последующее время.
В некоторых примерах воплощения способ может дополнительно включить описанные выше стадии, относящиеся к другим примерам воплощения изобретения, например, если имеются, по меньшей мере, два вторых сигнала, когда, по меньшей мере, один из двух вторых сигналов является первичным вторым сигналом, выделенным как наиболее точный из двух вторых сигналов, и другие вторые сигналы, по меньшей мере, из двух вторых сигналов являются сигналами, которые являются менее точными, чем первичный второй сигнал, который можно использовать, когда первичный второй сигнал, по меньшей мере, временно недоступен: определение точности каждого, по меньшей мере, из двух вторых сигналов относительно первичного второго сигнала; упорядочение, по меньшей мере, двух вторых сигналов от наиболее точного до наименее точного и упорядочение LO для исправления ошибки сдвига LO относительно доступного первичного второго сигнала, на основе упорядочения, по меньшей мере, двух вторых сигналов.
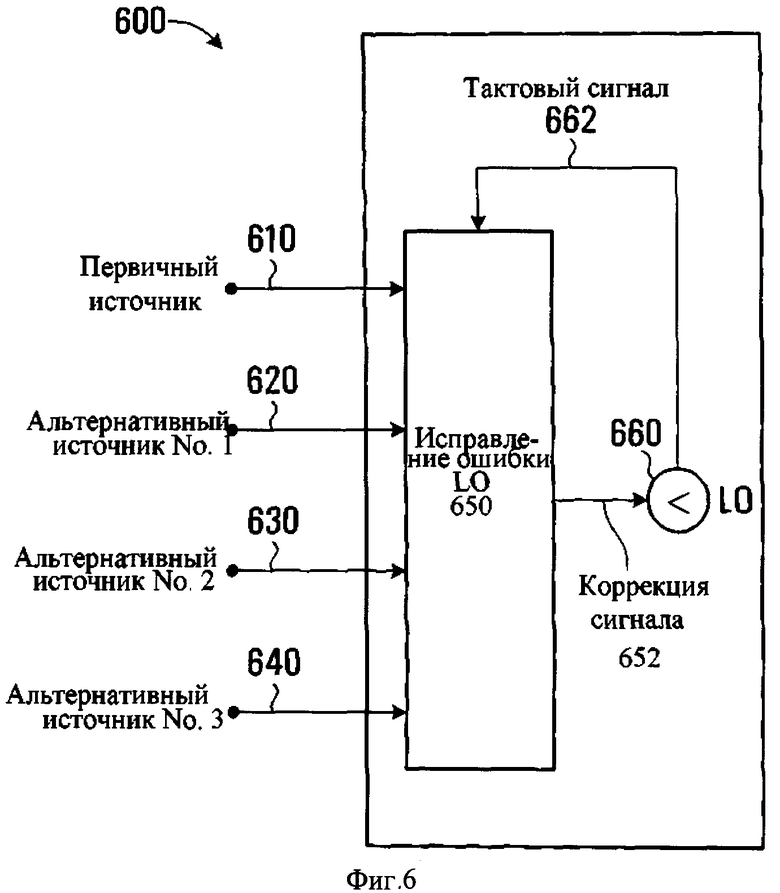
Ниже подробно описывается пример управляемого устройства со ссылкой на фигуру 6. Фигура 6 иллюстрирует управляемое устройство 600, имеющее множество входов 610, 620, 630, 640 для получения сигналов точного времени и/или частоты из множества источников основного ресурса (не показано). Управляемое устройство также включает корректор ошибок LO 650, который имеет множество входов 610, 620, 630, 640. Если второй сигнал недоступен для упорядочения LO, корректор ошибок LO 650 используется для упорядочения LO, используя источник, который менее точен, чем второй сигнал.
Если второй сигнал становится недоступным до того, как устройство будет использовать второй сигнал для упорядочения LO в непрерывном режиме, корректор ошибок LO 650 дополнительно используется для исправления ошибки сдвига LO относительно второго сигнала на основе информации, полученной во время временной доступности второго сигнала и может упорядочить LO, используя источник, который менее точен, чем второй сигнал, до тех пор пока второй сигнал не становится, по меньшей мере, временно доступен в последующее время.
Выход 652 из корректора ошибок LO 650 предназначен для LO 660. Выход 662 гетеродина LO 660 также используются для входа корректора ошибок LO 650, чтобы помочь в определении сигнала коррекции от одного или нескольких входов, которые используются для исправления ошибки сдвига.
В некоторых примерах воплощения функции корректора ошибок LO 650 могут быть включены в блок присвоения приоритетов типа блока присвоения приоритетов 250 фигуры 3. В некоторых примерах воплощения корректор ошибок LO может быть отдельным функциональным модулем, который работает на выходе сигнала коррекции от блока присвоения приоритетов, подобного блоку присвоения приоритетов 250 фигуры 3.
На фигуре 6 показано, что имеется множество входов в корректор LO. Однако в некоторых примерах воплощения корректор LO имеет только один вход, который получает единственный второй сигнал, используемый для упорядочения LO. Когда единственный второй сигнал недоступен, один способ упорядочения LO может быть выполнен, блокируя настройку LO в положении, соответствующем наиболее точному и/или стабильному сигналу в течение длительного времени, пока не поступит лучшая информация.
Корректор ошибок LO 650 может быть реализован в программном обеспечении, аппаратных средствах или в некоторой их комбинации. Например, в воплощении программного обеспечения различные процессы сравнения сигналов реализуются как один или несколько программных модулей, а функции упорядочения реализуется другим модулем. В аппаратной реализации различные сигналы функции сравнения, обработки и упорядочения могут быть реализованы, используя, например, без ограничения, ASIC или FPGA.
В свете вышеприведенного описания возможны многочисленные модификации и изменения настоящего изобретения. Следовательно, понятно, что в пределах объема приведенных пунктов патентования изобретение может быть осуществлено иначе, чем описано здесь.


Изобретение относится к области синхронизации частоты и может быть использовано в сетях связи. Достигаемый технический результат - исправление ошибок сдвига частоты гетеродина, которые возникают с течением времени. Устройство выбора оптимального источника для упорядочения гетеродина содержит гетеродин (LO), используемый для формирования первого сигнала, имеющего информацию о времени, о частоте, о фазе или их комбинации, блок присвоения приоритетов, содержащий, по меньшей мере, два входа, причем каждый вход предназначен для получения соответствующего второго сигнала, имеющего информацию о времени, о частоте, о фазе или их комбинации, этот блок определяет точность, по меньшей мере, одного второго сигнала, по меньшей мере, из двух вторых сигналов относительно второго сигнала, выделенного как наиболее точный сигнал, по меньшей мере, из двух вторых сигналов, этот блок присвоения приоритетов необходим для упорядочения, по меньшей мере, двух вторых сигналов от наиболее точного до наименее точного и для исправления ошибки сдвига частоты LO относительно наиболее точного второго сигнала, который доступен устройству, на основе упорядочивания, по меньшей мере, двух вторых сигналов. Способ характеризуется рядом действий для устранения ошибки сдвига частоты гетеродина (LO). 2 н. и 18 з.п. ф-лы, 6 ил.
1. Устройство для выбора оптимального источника для регулировки гетеродина, содержащее:
гетеродин (LO), выполненный с возможностью формирования первого сигнала, содержащего по меньшей мере одно из информации времени, информации частоты, информации фазы и их комбинаций;
блок присвоения приоритетов, имеющий по меньшей мере два входа, причем каждый вход выполнен с возможностью приема соответствующего второго сигнала, содержащего по меньшей мере одно из информации времени, информации частоты, информации фазы и их комбинаций, при этом блок присвоения приоритетов выполнен с возможностью:
определять точность по меньшей мере одного второго сигнала из упомянутых по меньшей мере двух вторых сигналов относительно второго сигнала, выделенного как наиболее точный сигнал из этих по меньшей мере двух вторых сигналов, и
упорядочивать упомянутые по меньшей мере два вторых сигнала от наиболее точного до наименее точного;
при этом LO регулируется для корректировки ошибки сдвига LO относительно наиболее точного второго сигнала, который доступен устройству, на основе упомянутого упорядочения по меньшей мере двух вторых сигналов.
2. Устройство по п.1, в котором второй сигнал из упомянутых по меньшей мере двух вторых сигналов выбирается в качестве упомянутого выделенного наиболее точного второго сигнала с целью упорядочения этих по меньшей мере двух вторых сигналов.
3. Устройство по п.1 или 2, в котором, если выделенный наиболее точный второй сигнал недоступен, LO упорядочивается относительно второго сигнала, который является следующим по точности от наиболее точного второго сигнала и который является доступным устройству, на основе упомянутого упорядочения по меньшей мере двух вторых сигналов.
4. Устройство по п.1 или 2, в котором каждый вход из упомянутых по меньшей мере двух входов выполнен с возможностью приема соответствующего второго сигнала, который является одним из группы сигналов, включающих в себя:
(a) GPS сигнал времени;
(b) сетевой сигнал времени;
(c) сетевой сигнал частоты;
(d) сигнал, следующий из математической модели LO;
(e) сигнал, полученный в период, в течение которого LO был отрегулирован упомянутым выделенным самым точным вторым сигналом; и
(f) сигнал, содержащий информацию синхронизации.
5. Устройство по п.4, в котором сетевой сигнал времени выбирается в соответствии с IEEE 1588.
6. Устройство по п.4, в котором сетевой сигнал частоты выбирается в соответствии с по меньшей мере одним из синхронного Ethernet и адаптивного восстановления синхронизации (ACR).
7. Устройство по п.4, в котором математическая модель LO является по меньшей мере одной из сформированной устройством и поддерживаемой устройством.
8. Устройство по п.1 или 2, в котором каждый вход из упомянутых по меньшей мере двух входов выполнен с возможностью приема соответствующего второго сигнала через одно из свободного пространства, электрического проводника и оптического проводника.
9. Устройство по п.1 или 2, в котором порядок упомянутых по меньшей мере двух вторых сигналов от наиболее точного до наименее точного изменяется с течением времени в зависимости от различных факторов, которые влияют на вторые сигналы.
10. Устройство по п.1 или 2, выполненное с возможностью осуществления по меньшей мере одного из:
(a) приема информации, отправленной по меньшей мере одним источником, внешним по отношению к устройству, причем данная информация относится к доступности этого по меньшей мере одного источника в плане подачи на один вход из упомянутых по меньшей мере двух входов соответствующего второго сигнала; и
(b) обнаружения доступности по меньшей мере одного источника, внешнего по отношению к устройству, который обеспечивает на один вход из упомянутых по меньшей мере двух входов соответствующий второй сигнал.
11. Устройство по п.1 или 2, в котором блок присвоения приоритетов дополнительно содержит:
множество генераторов сигналов коррекции, причем каждый генератор сигнала коррекции связан с соответствующим входным сигналом и каждый генератор сигналов коррекции выполнен с возможностью приема второго сигнала; каждый генератор сигналов коррекции выполнен с возможностью приема тактового сигнала от LO; каждый генератор сигналов коррекции выполнен с возможностью формирования сигнала коррекции, который зависит от принятого входного сигнала и тактового сигнала от LO;
множество сумматоров, по одному сумматору на каждый второй сигнал, за исключением второго сигнала, выделенного как наиболее точный сигнал, при этом каждый сумматор выполнен с возможностью приема сигнала коррекции от второго сигнала, выделенного как наиболее точный сигнал, и сигнала коррекции от одного из остальных вторых сигналов;
селектор сигнала коррекции, выполненный с возможностью приема выходных сигналов упомянутого множества сумматоров, причем селектор сигнала коррекции дополнительно выполнен с возможностью упорядочения упомянутых по меньшей мере двух вторых сигналов от наиболее точного до наименее точного в зависимости от выходных сигналов сумматоров.
12. Способ выбора оптимального источника для регулировки гетеродина, содержащий этапы, на которых:
посредством гетеродина (LO) формируют первый сигнал, включающий в себя по меньшей мере одно из информации времени, информации частоты, информации фазы и их комбинаций;
принимают по меньшей мере два вторых сигнала, причем каждый второй сигнал содержит по меньшей мере одно из информации времени, информации частоты, информации фазы и их комбинаций, причем по меньшей мере один из упомянутых по меньшей мере двух вторых сигналов принимается от внешнего источника;
определяют точность по меньшей мере одного второго сигнала из упомянутых по меньшей мере двух вторых сигналов относительно второго сигнала, выделенного как наиболее точный из этих по меньшей мере двух вторых сигналов;
упорядочивают упомянутые по меньшей мере два вторых сигнала от наиболее точного до наименее точного; и
регулируют LO для корректировки ошибки сдвига LO относительно наиболее точного второго сигнала, который является доступным, на основе упомянутого упорядочения по меньшей мере двух вторых сигналов.
13. Способ по п.12, дополнительно содержащий этап, на котором выбирают второй сигнал из упомянутых по меньшей мере двух вторых сигналов в качестве упомянутого выделенного наиболее точного второго сигнала с целью упорядочения этих по меньшей мере двух вторых сигналов.
14. Способ по п.12 или 13, в котором, в случае недоступности выделенного наиболее точного второго сигнала, при регулировке LO для корректировки ошибки сдвига регулируют LO для корректировки ошибки сдвига относительно второго сигнала, который является следующим по точности от наиболее точного второго сигнала и который является доступным, на основе упомянутого упорядочения по меньшей мере двух вторых сигналов.
15. Способ по п.12 или 13, в котором прием каждого из упомянутых по меньшей мере двух вторых сигналов содержит, для каждого из этих по меньшей мере двух вторых сигналов, прием соответствующего сигнала, который является одним из группы сигналов, включающих:
(a) GPS сигнал времени;
(b) сетевой сигнал времени;
(c) сетевой сигнал частоты;
(d) сигнал, следующий из математической модели LO;
(e) сигнал, полученный в период, в течение которого LO был отрегулирован упомянутым выделенным наиболее точным вторым сигналом; и
(f) сигнал, содержащий информацию синхронизации.
16. Способ по п.15, в котором при приеме сетевого сигнала времени принимают сетевой сигнал времени в соответствии с IEEE 1588.
17. Способ по п.15, в котором при приеме сетевого сигнала частоты принимают сетевой сигнал частоты в соответствии с по меньшей мере одним из синхронного Ethernet и адаптивного восстановления синхронизации (ACR).
18. Способ по п.15, дополнительно содержащий по меньшей мере один из следующих этапов, на которых:
формируют математическую модель LO и
поддерживают математическую модель LO.
19. Способ по п.12 или 13, дополнительно содержащий по меньшей мере один из следующих этапов, на которых:
(a) принимают информацию, отправленную по меньшей мере одним внешним источником, причем данная информация относится к доступности этого по меньшей мере одного источника в плане обеспечения второго сигнала из упомянутых по меньшей мере двух вторых сигналов; и
(b) обнаруживают доступность по меньшей мере одного внешнего источника, который обеспечивает второй сигнал из упомянутых по меньшей мере двух вторых сигналов.
20. Способ по п.12 или 13, дополнительно содержащий этап, на котором переупорядочивают упомянутые по меньшей мере два вторых сигнала от наиболее точного до наименее точного на основе различных факторов, которые влияют на эти вторые сигналы с течением времени.
| ИСПОЛЬЗОВАНИЕ ФИЛЬТРОВ С ФИКСИРОВАННОЙ ПОЛОСОЙ ПРОПУСКАНИЯ ДЛЯ ПРОГРАММИРУЕМОЙ ПОЛОСЫ ПРОПУСКАНИЯ ПРОМЕЖУТОЧНОЙ ЧАСТОТЫ | 2002 |
|
RU2304346C2 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ И УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РЛС, РЕАЛИЗУЮЩЕЙ СПОСОБ | 2007 |
|
RU2338219C1 |
| US 6307896 B1, 23.10.2001 | |||
| EP 1858169 B1, 08.10.2008 | |||

