Изобретение относится к весоизмерительной технике и может быть использовано в различных отраслях промышленности для калибровки, градуировки и поверки платформенных, автомобильных, вагонных и других тензометрических и механических весов.
Известен способ (RU 2419771 С2, МПК G01G 23/01, оп. 27.05.11), в котором переносной задатчик силы соединяют с основанием, прикладывают с помощью силовводящего звена задатчика силы к грузоприемной платформе, направленные по вертикали нагрузки, измеряют их с помощью эталонного датчика. Сравнивают измеренные значения приложенных нагрузок с показаниями весов и определяют погрешность весов, помещают силовводящее звено задатчика силы между грузоприемной платформой весов и основанием. Размещают на грузоприемной платформе весов груз, равный верхнему значению заданного диапазона нагружения, например наибольшему пределу взвешивания весов. Затем посредством задатчика силы задают значения силы, разгружающие и нагружающие грузоприемную платформу.
Недостатком способа является невысокая точность для поверки весов и использование в основном для крупногабаритных грузов.
Известен способ поверки весов (RU 2278359 С2, МПК G01G 23/01, оп. 20.06.2006).
При проведении поверки осуществляется измерение веса контрольного груза на образцовых весах, измерение веса контрольного груза на поверяемых весах, осуществление поверки по сравнению результатов упомянутых измерений. В качестве контрольного груза используют рабочий груз, вес которого подлежит измерению в процессе эксплуатации поверяемых весов, а измерение веса рабочего груза на образцовых и поверяемых весах производят одновременно. При измерении производят совмещение вектора сил, создаваемого весом рабочего груза, с осями соответствующих пар весоизмерительных датчиков образцовых и поверяемых весов. Технический результат заключается в повышении достоверности результата поверки и уменьшении трудоемкости реализации способа.
Недостатком способа является невысокая точность для поверки весов и использование в основном для крупногабаритных грузов.
Известно устройство (RU 71428 U1, МПК G01G 23/01, оп. 10.03.2008) для поверки тензометрических весов, включающее корпус, закрепленный на неподвижной опоре, в котором помещено силозадающее средство, нагружающее тензометрический силоизмерительный элемент образцовой нагрузки, установленный на подвижной части по оси приложения нагрузки, и поверяемые тензометрические силоизмерительные элементы, установленные на неподвижной опоре симметрично относительно оси приложения нагрузки, отличающееся тем, что силозадающее средство установлено в верхней части корпуса с возможностью нагружения опиранием на тензометрический силоизмерительный элемент образцовой нагрузки и подвижную часть с возможностью нагружения опиранием на поверяемые тензометрические силоизмерительные элементы.
В качестве силозадающего средства использован пневмодомкрат в виде армированной металлическим кордом резиновой подушки.
Недостатком данного устройства является то, что в силу использования только пневмодомкрата оно не позволяет создавать большие нагрузки за счет значительного увеличения давления.
Наиболее близким решением к предлагаемому изобретению является устройство для поверки весов (RU 2171972С2, МПК G01G 23/01, оп. 10.08.2001). Предложено малогабаритное устройство для поверки тензометрических бункерных весов, содержащее средство нагружения, соединенное тягой с бункером весов, и средство, показывающее величины образцовой нагрузки. Причем в качестве средства, показывающего величину образцовой нагрузки, применено эталонное тензометрическое силоизмерительное средство, установленное по оси приложения нагрузки между коромыслом и корпусом, причем в качестве силоизмерительного средства может быть применен эталонный тензометрический датчик.
Данное устройство можно использовать только для поверки бункерных весов.
Задачей предлагаемого решения является способ замещения статических сил, создаваемых прямым нагружением весоизмерительных устройств грузами известной массы при калибровке и поверке, контролируемыми силами, создаваемыми устройствами нагружения с подвижными опорами, что приводит к упрощению операций нагружения, уменьшению габаритов и упрощению конструкций опорных площадок для размещения грузов.
Поставленная задача решается с помощью способа создания контролируемой силы при калибровке и поверке весоизмерительных устройств, включающего создание нагрузки на опорную площадку нагружаемой системы силосоздающим устройством с подвижной опорой, измерение величины нагрузки с помощью силоизмерительного элемента, расположенного по оси приложения сил, и считывание показаний силы.
Для создания контролируемой силы используют устройство, содержащее одну или более опор, выполненных с возможностью движения с помощью одного или более силосоздающих устройств, один или более силоизмерительных элементов, связанных с электронным блоком, один или более упругих элементов в качестве компенсатора сил, возникающих при изменении физических и геометрических параметров устройства, нагружают опорную площадку нагружаемой системы перемещением подвижной опоры до упора в неподвижную опору, определяют силу нагружения с помощью силоизмерительных элементов, передающих электрический сигнал, пропорциональный реакции опорной площадки нагружаемой системы в электронный блок, преобразующий электрический сигнал в значение силы с выводом показаний силы на табло.
Предпочтительно в качестве силосоздающего устройства используют домкраты, гидравлические или пневматические устройства, винтовые пары.
Предпочтительно в качестве силоизмерительных элементов используют тензометрические или преобразовательные датчики, выдающие электрический сигнал, пропорциональный создаваемой силе.
Предпочтительно упругий элемент, являющийся компенсатором сил, устанавливают перед силосоздающим устройством или после него.
Предпочтительно с помощью электронного блока осуществляют процесс нагружения, контроля и управления создаваемой силой.
Поставленная задача решается также с помощью устройства для создания контролируемой силы при калибровке и поверке весоизмерительных устройств, включающего силосоздающее устройство с подвижной опорой, силоизмерительный элемент, расположенный по оси приложения сил.
Устройство содержит одну или более опор, выполненных с возможностью движения с помощью одного или более силосоздающих устройств, один или более силоизмерительных элементов, связанных с электронным блоком, один или более упругих элементов в качестве компенсатора сил, возникающих при изменении физических и геометрических параметров устройства.
Предпочтительно в качестве силосоздающего устройства используют домкраты, гидравлические или пневматические устройства, винтовые пары.
Предпочтительно в качестве силоизмерительных элементов используют тензометрические или преобразовательные датчики, выдающие электрический сигнал, пропорциональный создаваемой силе.
Предпочтительно упругий элемент, являющийся компенсатором сил, установлен перед силосоздающим устройством или после него.
Предпочтительно электронный блок выполнен с возможностью проведения процессов нагружения, контроля и управления создаваемой силой.
Предпочтительно в качестве силосоздающего устройства используют домкрат, в качестве силоизмерительного элемента используют тензометрический датчик, между домкратом и датчиком в корпусе расположена центрирующая шайба, после которой расположена опорная шайба.
На чертеже изображено устройство для реализации способа создания контролируемой силы при поверке и калибровке весов.
Данное устройство устанавливается между неподвижной опорной плоскостью-опорой 2 и опорной площадкой 7 нагружаемой системы. Требуемая сила появляется в результате реакции нагружаемых неподвижных опор 2 при перемещении подвижных опор 1 устройства.
Устройство для создания контролируемой силы содержит: подвижную опору 1, домкрат в качестве силосоздающего устройства 3, упругий элемент 11, центрирующую шайбу 4, тензометрический датчик 5, опорную шайбу 6, электронный блок 8, табло электронного блока 9, корпус 10 силосоздающего устройства.
Работа устройства для создания контролируемой силы при поверке и калибровке весоизмерительных устройств показана на примере силосоздающего устройства, выполненного в корпусе 10 с одним домкратом 3 и одним тензометрическим датчиком 5.
При выдвижении подвижной опоры 1 штоком домкрата 3 опора упирается в неподвижную опорную плоскость-опору 2, сила реакции опорной плоскости-опоры 2 передается через упругий элемент 11 и далее через шток и корпус домкрата 3 на центрирующую шайбу 4, далее на датчик тензометрический 5, далее на опорную шайбу 6, далее на опорную площадку 7 нагружаемой системы или устройства. Блок электронный 8 преобразует электрический сигнал с датчика тензометрического 5 в значение силы и отображает ее значение на табло 9 электронного блока 8. Задание необходимого усилия на нагружаемой опорной площадке 7 производится таким выдвижением подвижной опоры 1, при котором значение силы, отображаемое на табло 9 электронного блока 8, будет соответствовать требуемой нагрузке. Упругий элемент 11 является компенсатором сил, возникающих при выдвижении подвижной опоры 1, количество упругих элементов 11 в корпусе 10 зависит от технических условий. Упругий элемент 11 выполняется из любого упругого материала, известного из уровня техники.
Электронный блок 8 оснащен микропроцессором и другими электронными компонентами, известными из уровня техники.
На чертеже показано устройство для создания контролируемой силы в базовом варианте, включающее одну подвижную опору, одно силосоздающее устройство, один силоизмерительный элемент и один упругий элемент. Количество элементов в данном устройстве зависит от требуемой нагрузки, исходя из технических требований поверяемых или калибруемых устройств, весов, приборов и другого оборудования.
Техническим результатом предлагаемых способа и устройства является замещение статических сил, создаваемых прямым нагружением весоизмерительных устройств грузами известной массы при калибровке и поверке, контролируемыми силами, создаваемыми устройствами нагружения с подвижными опорами, что приводит к упрощению операций нагружения, уменьшению габаритов и упрощению конструкций опорных площадок для размещения грузов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОВЕРКИ ТЕНЗОМЕТРИЧЕСКИХ БУНКЕРНЫХ ВЕСОВ | 1999 |
|
RU2171972C2 |
| Силоизмерительная машина | 1981 |
|
SU1029020A1 |
| СПОСОБ БЕЗГИРЕВОЙ ПОВЕРКИ ВЕСОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2246705C2 |
| УСТАНОВКА СИЛОИЗМЕРИТЕЛЬНАЯ ГИДРАВЛИЧЕСКАЯ ОБРАЗЦОВАЯ | 2003 |
|
RU2265813C2 |
| ЭЛЕКТРОННЫЕ ТЕНЗОВЕСЫ | 1993 |
|
RU2044283C1 |
| УСТРОЙСТВО ДЛЯ ПОВЕРКИ СИЛОИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 1996 |
|
RU2122714C1 |
| Способ градуировки силоизмерительных преобразователей | 1982 |
|
SU1089440A1 |
| ЭТАЛОННАЯ СИЛОВОСПРОИЗВОДЯЩАЯ МАШИНА ПРЯМОГО НАГРУЖЕНИЯ | 2005 |
|
RU2296967C1 |
| МАШИНА СИЛОЗАДАЮЩАЯ (СИЛОИЗМЕРИТЕЛЬНАЯ) СЖАТИЯ ОБРАЗЦОВАЯ | 2011 |
|
RU2456565C1 |
| Устройство для поверки динамометров и силоизмерительных датчиков | 1978 |
|
SU735943A1 |
Изобретение относится к весоизмерительной технике и может быть использовано в различных отраслях промышленности для калибровки, градуировки и поверки платформенных, автомобильных, вагонных и других тензометрических и механических весов. Способ включает создание нагрузки на опорную площадку нагружаемой системы силосоздающим устройством с подвижной опорой, измерение величины нагрузки с помощью силоизмерительного элемента, расположенного по оси приложения сил, и считывание показаний силы. Для создания контролируемой силы используют устройство, содержащее одну или более опор, выполненных с возможностью движения с помощью одного или более силосоздающих устройств, один или более силоизмерительных элементов, связанных с электронным блоком, один или более упругих элементов в качестве компенсатора сил, возникающих при изменении физических и геометрических параметров устройства, нагружают опорную площадку нагружаемой системы перемещением подвижной опоры до упора в неподвижную опору, определяют силу нагружения с помощью силоизмерительных элементов, передающих электрический сигнал, пропорциональный реакции опорной площадки нагружаемой системы в электронный блок, преобразующую электрический сигнал в значение силы с выводом показаний силы на табло. Техническим результатом изобретения является замещение статических сил, упрощение конструкций опорных площадок для размещения грузов. 2 н. и 9 з.п. ф-лы, 1 ил.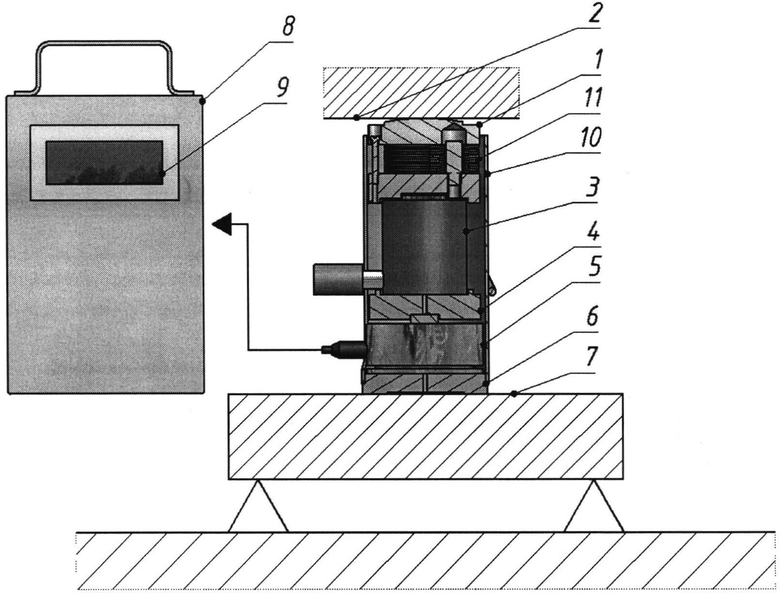
1. Способ создания контролируемой силы при калибровке и поверке весоизмерительных устройств, включающий создание нагрузки на опорную площадку нагружаемой системы силосоздающим устройством с подвижной опорой, измерение величины нагрузки с помощью силоизмерительного элемента, расположенного по оси приложения сил, и считывание показаний силы, отличающийся тем, что для создания контролируемой силы используют устройство, содержащее одну или более опор, выполненных с возможностью движения с помощью одного или более силосоздающих устройств, один или более силоизмерительных элементов, связанных с электронным блоком, один или более упругих элементов в качестве компенсатора сил, возникающих при изменении физических и геометрических параметров устройства, нагружают опорную площадку нагружаемой системы перемещением подвижной опоры до упора в неподвижную опору, определяют силу нагружения с помощью силоизмерительных элементов, передающих электрический сигнал, пропорциональный реакции опорной площадки нагружаемой системы в электронный блок, преобразующий электрический сигнал в значение силы с выводом показаний силы на табло.
2. Способ по п.1, отличающийся тем, что в качестве силосоздающего устройства используют домкраты, гидравлические или пневматические устройства, винтовые пары.
3. Способ по п.1, отличающийся тем, что в качестве силоизмерительных элементов используют тензометрические или преобразовательные датчики, выдающие электрический сигнал, пропорциональный создаваемой силе.
4. Способ по п.1, отличающийся тем, что с помощью электронного блока осуществляют процесс нагружения, контроля и управления создаваемой силой.
5. Способ по любому из пп.1-4, отличающийся тем, что упругий элемент, являющийся компенсатором сил, устанавливают перед силосоздающим устройством или после него.
6. Устройство для создания контролируемой силы при калибровке и поверке весоизмерительных устройств, включающее силосоздающее устройство с подвижной опорой и силоизмерительный элемент, расположенный по оси приложения сил, отличающееся тем, что устройство содержит одну или более опор, выполненных с возможностью движения с помощью одного или более силосоздающих устройств, один или более силоизмерительных элементов, связанных с электронным блоком, один или более упругих элементов в качестве компенсатора сил, возникающих при изменении физических и геометрических параметров устройства.
7. Устройство по п.6, отличающееся тем, что в качестве силосоздающего устройства используют домкраты, гидравлические или пневматические устройства, винтовые пары.
8. Устройство по п.6, отличающееся тем, что в качестве силоизмерительных элементов используют тензометрические или преобразовательные датчики, выдающие электрический сигнал, пропорциональный создаваемой силе.
9. Устройство по п.6, отличающееся тем, что упругий элемент, являющийся компенсатором сил, установлен перед силосоздающим устройством или после него.
10. Устройство по п.6, отличающееся тем, что электронный блок выполнен с возможностью проведения процессов нагружения, контроля и управления создаваемой силой.
11. Устройство по любому из пп.6-10, отличающееся тем, что в качестве силосоздающего устройства используют домкрат, в качестве силоизмерительного элемента используют тензометрический датчик, между домкратом и датчиком в корпусе расположена центрирующая шайба, после которой расположена опорная шайба.
| УСТРОЙСТВО ДЛЯ ПОВЕРКИ ТЕНЗОМЕТРИЧЕСКИХ БУНКЕРНЫХ ВЕСОВ | 1999 |
|
RU2171972C2 |
| Трехфазный короткозамкнутый асинхронный двигатель | 1946 |
|
SU71428A1 |
| УСТРОЙСТВО ДЛЯ ПОВЕРКИ ТЕНЗОМЕТРИЧЕСКИХ ВЕСОВ | 2007 |
|
RU2347197C2 |
| US 20120228038 А1, 13.09.2012 | |||

