Изобретение относится к электромашиностроению и может быть использовано на электромашиностроительных заводах, ремонтных предприятиях и в эксплуатации. ГОСТ 10169 «Машины электрические трехфазные синхронные, методы испытаний» предписывает испытания производить при непосредственной нагрузке, допускаются также испытания в косвенных режимах. В последнее время заказчики все чаще требуют проведение испытаний при непосредственной нагрузке и даже сдаточные непрерывные трехсуточные испытания в режиме номинальной нагрузки на заводе-изготовителе.
Наиболее экономичным из известных является способ взаимной нагрузки, когда две механически сопряженные машины работают друг на друга от одной электрической сети - одна в режиме двигателя, другая в режиме генератора. Из электрической сети или от вспомогательного двигателя, если потери покрываются механически с вала, потребляется только сумма потерь в сопряженных машинах.
При взаимной нагрузке необходимо обеспечить смещение магнитных осей полюсов на определенный угол - угол нагрузки Θ (тэта). Это смещение может быть выполнено механическим способом за счет разного рода планетарных передач, которые могут обеспечить регулируемый поворот осей, или специальных двойных муфт. В последнем случае смещение обеспечивается только на определенный заранее заданный угол. Для задания другой нагрузки необходимо остановить машины и подобрать другой угол. Возможен электрический поворот магнитных осей полюсов, когда одна из машин имеет специальное исполнение с ротором продольно-поперечного возбуждения с двумя взаимно перпендикулярными обмотками возбуждения, в которой поворот поля ротора на ограниченный угол достигается регулированием токов возбуждения этих обмоток по величине и направлению (Жерве Г.К. «Вопросы испытания крупных турбогенераторов». Энергия, Ленинградское отделение, 1970).
Задачей предлагаемого изобретения является создание способа взаимной нагрузки свободного от недостатков вышеперечисленных способов, а именно: сложностью выполнения планетарных передач, невозможностью регулирования нагрузки специальными сдвоенными муфтами или необходимостью создания специальной машины продольно-поперечного возбуждения.
Технический результат достигается тем, что в известных способах нагрузки синхронных машин, заключающихся в механическом сопряжении валов испытываемой и нагрузочной машин, одна из которых работает в режиме двигателя, а другая - в режиме генератора с возвратом электрической энергии источнику питания, в котором нагрузка обеспечивается за счет поворота поля ротора нагрузочной машины на ограниченный угол, либо смещением валов нагружаемых машин посредством специальной сдвоенной муфты или планетарной передачи, либо использованием специальной машины с продольно-поперечным возбуждением с двумя взаимно перпендикулярными обмотками возбуждения, в которой поворот поля на ограниченный угол достигается регулированием токов возбуждения этих обмоток по величине и направлению, взаимная нагрузка механически сопряженных машин с возвратом электрической энергии источнику питания достигается использованием в качестве нагрузочной машины асинхронной машины с фазным ротором, возбуждаемой со стороны ротора трехфазным током независимо задаваемой нулевой частоты с поворотом поля ротора на любой заданный угол с возможностью нагрузки испытываемых машин в двигательном или генераторном режиме, в том числе и углах нагрузки больше критического.
На фиг. 1 приведена схема осуществления нагрузки. Испытываемая синхронная машина 1 с обмоткой возбуждения 2 сопряжена механически с нагрузочной асинхронной машиной 3 с фазным ротором 4, а статоры машин подключены к одной электрической сети 6. Ротор 4 нагрузочной асинхронной машины 3 подключен к трехфазному источнику тока нулевой частоты 5. При повороте трехфазной системы токов в роторе 4 нагрузочной асинхронной машины 3 осуществляется поворот магнитной оси ротора 4 и изменение угла нагрузки Θ нагрузочной асинхронной машины 3 и соответственно изменение нагрузки испытываемой синхронной машины 1. Возврат энергии в испытываемую синхронную машину 1 осуществляется через общую электрическую сеть 6. От электрической сети 6 к взаимно нагружаемым машинам 1 и 3 через точку 7 на фиг.3 подводится сумма потерь в машинах за исключением джоулевых потерь в роторах (I2R) взаимно нагружаемых машин, подводимых как потери независимого возбуждения от источника постоянного тока к обмотке возбуждения 2 и от трехфазного источника тока нулевой частоты 5 к фазному ротору 4 нагрузочной асинхронной машины 3. Комплект приборов 8 на фиг.3 предназначен для измерения суммы потерь в машинах 1 и 3, подводимых от электрической сети 6.
В качестве трехфазного источника тока нулевой частоты 5 может использоваться коллекторная машина (машина постоянного тока) с равномерно размещенной по окружности коллектора трехфазной системой поворачиваемых щеток, либо регулируемый тиристорный преобразователь частоты при частоте 0 (ноль) герц.
При повороте поля ротора токи в различных фазах трехфазной системы могут меняться от нуля до амплитудного значения. При определенном неизменном положении оси поля ротора 4 нагрузочной асинхронной машины 3 распределение токов в фазах будет неравномерным, что при укороченном шаге обмотки ротора 4 может вызвать неравномерный нагрев по окружности ротора и появление в связи с этим механического небаланса и вибрации. С целью исключения этого явления при длительных неизменных нагрузках, например, при тепловых испытаниях нагружаемой синхронной машины 1, необходимо поворачивать поле ротора асинхронной машины 3 непрерывно. При этом обе машины 1 и 3 будут плавно переходить из режима двигателя в режим генератора и обратно. Поскольку поворот оси поля ротора асинхронной машины 3 производится независимо от нагрузки, например, поворотом щеток трехфазного источника тока нулевой частоты 5, то оказывается возможной устойчивая работа машины и 1, и 3 при углах нагрузки больших критического, на неустойчивой в обычных условиях падающей части угловой характеристики синхронной машины 1, т.е. при углах больших 90° (для неявнополюсных машин). При периодическом переходе машин из режима двигателя в режим генератора и наоборот величиной тока фазного ротора 4 асинхронной машины 3 (т.е. крутизной наклона угловой характеристики асинхронной машины 3) можно подобрать такой средний режим синхронной машины 1, чтобы среднеквадратичное значение тока статора было равно заданному, например, номинальному. Ток возбуждения синхронной машины 1 сразу задается номинальный.
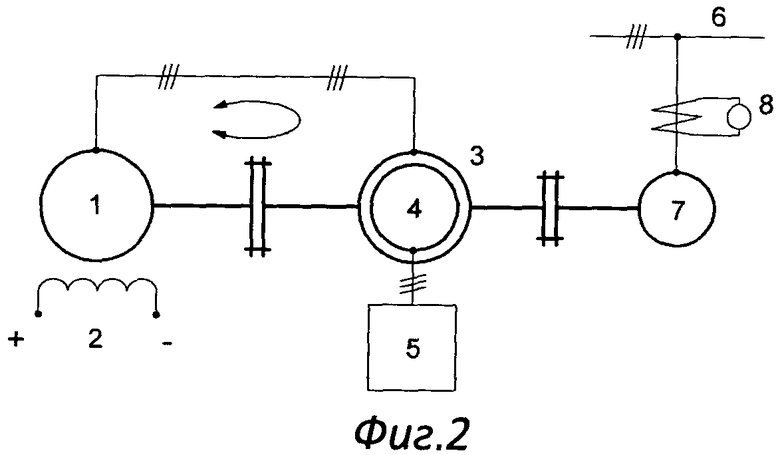
На фиг.2 изображен вариант, когда машины 1 и 3 работают изолированно от электрической сети 6, например, когда напряжение синхронной машины 1 не соответствует напряжению электрической сети 6. В этом случае покрытие потерь осуществляется от вспомогательного тарированного двигателя 7, подключенного к сети 6, а сумма потерь измеряется на входе в тарированный двигатель 7.
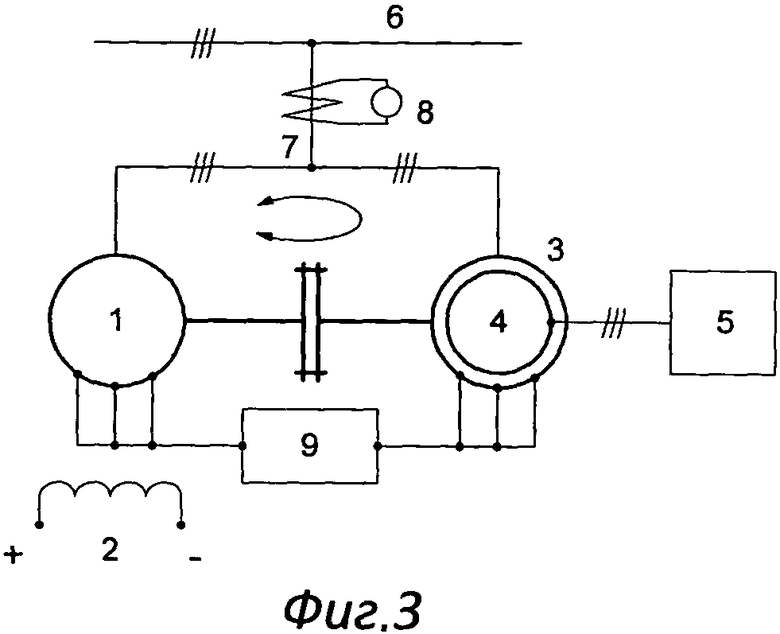
На фиг.3 изображен вариант, используемый при испытаниях нагружаемой синхронной машины 1 при определении нагрузочных характеристик, нагревов, КПД и добавочных нагрузочных потерь, где 9 специальная схема для измерения сопротивлений при наличии переменной ЭДС, включаемая между нейтралями машин 1 и 3 для измерения общего сопротивления статоров двух машин включая соединительные провода и аппаратуру - RΣ (Шарипов A.M. Измерение сопротивлений обмоток электрических машин под напряжением. Электротехническая промышленность, электрические машины, №10 (140), М., 1982, стр. 3-5).
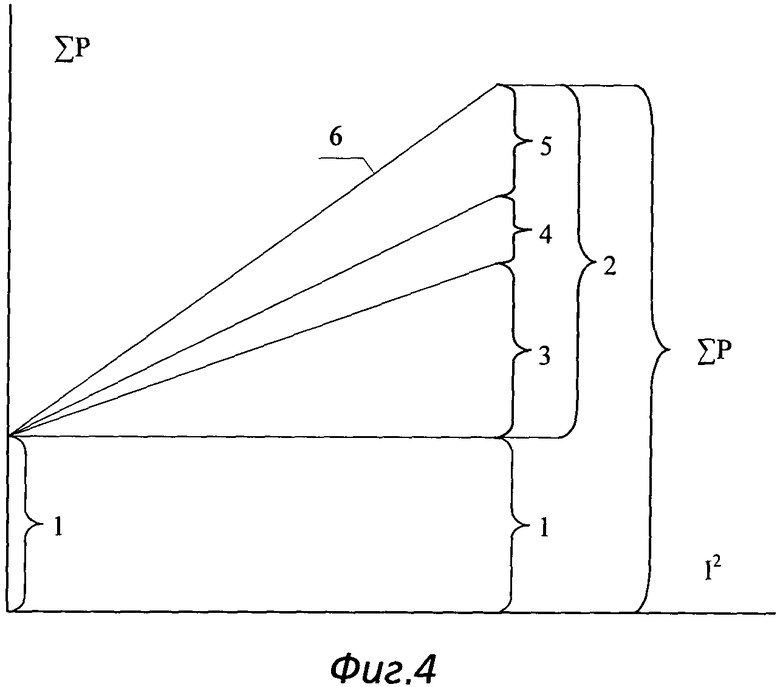
Пояснение к способу приведено на фиг.4. По экспериментально снятой данным способом нагрузочной характеристике строится зависимость измеренной суммы потерь ΣР от квадрата тока I2 - прямая 6. Эта зависимость от квадрата тока является линейной и отсекает в начальной части при нулевом нагрузочном токе постоянную часть потерь - отрезок 1, представляющий потери в стали и потери механические машин 1 и 3. По измеренным значениям сопротивления между нейтралями RΣ и измеренным токам статоров машин 1 и 3 вычисляются потери в обмотках статоров I2RΣ - переменная часть потерь - 3. Вычитаются нагрузочные добавочные потери предварительно протарированной нагрузочной асинхронной машины 3 с фазным ротором - переменная часть 4. Остаток - переменная часть 5 представляют искомые нагрузочные добавочные потери, измеренные при номинальной нагрузке и номинальном напряжении.
По вычисленным отдельным составляющим потерь, измеренных при номинальной нагрузке с хорошей точностью, определяют КПД машины 1 методом суммирования потерь по ГОСТ 25941 «Машины электрические вращающиеся, методы определения потерь и коэффициента полезного действия».
Экспериментальная проверка предлагаемого способа выполнена с машинами, сопряженными по схеме фиг.1.
Нагружаемый синхронный двигатель 1 типа СМ 114-6, 56 кВт, 380 В, 80 кВА, возбуждение 112 А, 18 В, 1000 об/мин.
Нагрузочный асинхронный двигатель 3 с фазным ротором типа АК-92/6, 75 кВт, 380 В, 151 А, cosφ=0,84, 970 об/мин, ротор 4 напряжение 538 В, ток 88 А.
Трехфазный источник тока нулевой частоты 5 - на базе машины постоянного тока ПН205 - с поворотной трехпальцевой щеточной траверзой, приводимой через редуктор и зубчатую передачу серводвигателем постоянного тока, который может поворачивать траверзу на любой заданный угол или поворачивать непрерывно.
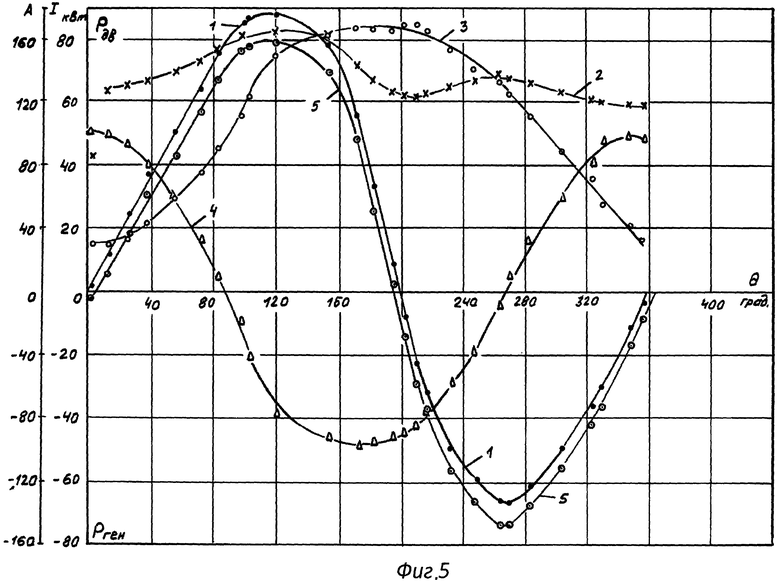
На фиг.5 представлены нагрузочные характеристики машины СМ-114-6 с нагрузочной машиной АК92-6 в зависимости от угла нагрузки Θ, где 1 - подведенная в режиме двигателя и отдаваемая в режиме генератора мощность нагружаемой машины СМ 114-6, 2 - ток статора нагружаемой машины СМ 114-6, 3 - ток статора нагрузочной машины АК92-6, 4 - ток возбуждения фазы А нагрузочной машины АК92-6,

где 71 - неизменное значение эффективного тока ротора АК92-6, 5 - электромагнитная мощность нагружаемой машины СМ114-6 (при делении на синхронную угловую частоту ω - электромагнитный момент), полученная вычетом из измеренной мощности 1 потерь в стали и нагрузочных в статоре машины СМ 114-6 в режиме двигателя (выше оси абсцисс) и добавлением потерь в стали и нагрузочных в статоре к измеренной мощности 1 в режиме генератора (ниже оси абсцисс).
Напряжение сети 388 В, ток возбуждения нагружаемой машины СМ114-6, If=110 А, эффективный ток ротора нагрузочной машины If=71 А - остаются постоянными во всем диапазоне определения характеристик.
Максимальный электромагнитный момент в режиме двигателя смещен в сторону большего угла 120° реактивным моментом явнополюсной машины и, наоборот - в сторону меньшего угла 70° в режиме генератора. Это явление у явнополюсных машин известно и хорошо рассчитывается при известных продольной xd и поперечной xq реактивностях.
Не известно обнаруженное при данных испытаниях явление увеличения угла нагрузки в режиме двигателя больше 180° и соответственно меньше 180° в режиме генератора.
Точность определения задаваемого угла нагрузки Θ (фиг.5) подтверждается полным периодом 360° первичной 1 и электромагнитной мощности 5, а также углами 0, 90, 180, 270 и 360° прохождения тока возбуждения 4 фазы А через нулевые, максимальные и минимальные значения.
По-видимому, экспериментально определить нагрузочную характеристику при углах больше критического в неустойчивой части характеристики, когда угол нагрузки Θ является функцией принимаемой нагрузки, представлялось невозможным. В заявляемом случае нагрузка является функцией независимо от нагрузки задаваемого угла Θ и тем самым обеспечивается устойчивая работа при углах нагрузки больше критического, так как любые возмущающие факторы не меняют заданный угол Θ, что и подтверждается снятой по точкам нагрузочной характеристикой во всем диапазоне изменения угла Θ от 0 до 360°.
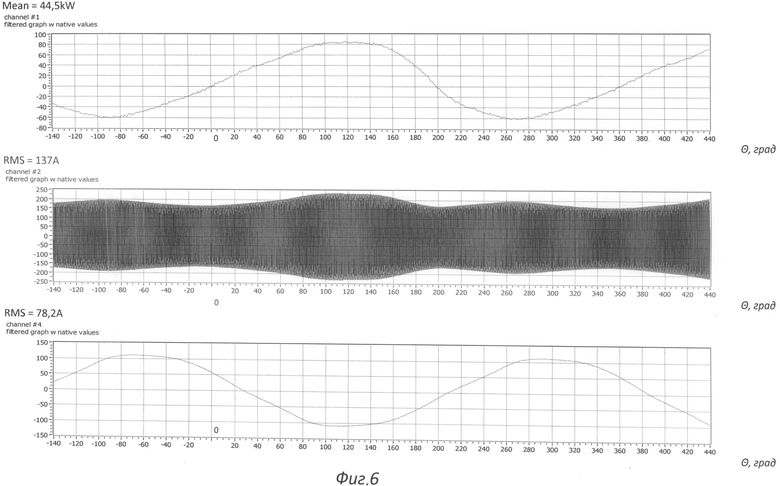
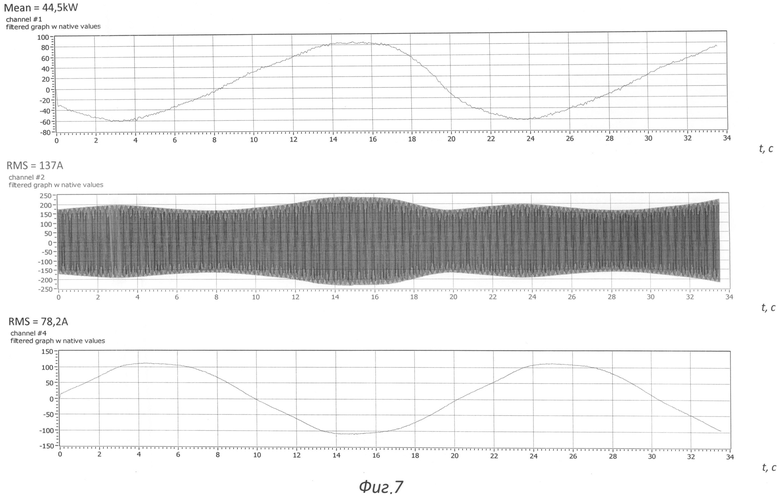
На фиг.6, 7 приведены осциллограммы мощности и токов при непрерывном изменении угла Θ в функции угла Θ и в функции времени для имитации длительных режимов с расчетом средних значений мощности и среднеквадратичных значений токов. Расположение на осциллограммах сверху вниз: мощность нагружаемой машины СМ114-6, ток статора нагружаемой машины СМ114-6, ток одной фазы возбуждения ротора нагрузочной машины АК92-6.
В порядке промышленного использования предлагаемого изобретения проведены нагрузочные испытания в полном объеме в соответствии с ГОСТ Р 52776-2007 (МЭК 60034-1-2004) синхронного электродвигателя СДР-6300-10000, 6300 кВт, 10000 В, 3000 об/мин с нагрузочной асинхронной машиной с фазным ротором АСГ-8000, 8000 кВт, 6/10 кВ, 3000 об/мин. Машина СДР-6300 принята заказчиком (Транснефть).
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ НАГРУЖЕНИЯ СИНХРОННЫХ МАШИН ПРИ ИСПЫТАНИЯХ | 1991 |
|
SU1818984A1 |
| Устройство для испытания электрических машин | 1974 |
|
SU562899A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ РОЛИКОВЫХ ЦЕПЕЙ | 2008 |
|
RU2362983C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА (ВАРИАНТЫ) | 2000 |
|
RU2164053C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ЦЕПНЫХ ПЕРЕДАЧ С СИНХРОННЫМИ МАШИНАМИ | 2008 |
|
RU2362982C1 |
| ТРЕХФАЗНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1997 |
|
RU2130689C1 |
| Устройство для проведения лабораторных работ по электротехнике | 1984 |
|
SU1211799A1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ПЕРЕМЕННОГО ТОКА | 1992 |
|
RU2025037C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАГРУЗОЧНЫХ ДОБАВОЧНЫХ ПОТЕРЬ В АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЯХ | 1967 |
|
SU199980A1 |
| Устройство для испытания синхронных машин | 1978 |
|
SU752638A1 |
Изобретение относится к области электротехники и может быть использовано для испытания синхронных машин на электромашиностроительных заводах, ремонтных предприятиях и при эксплуатации. Техническим результатом является повышение точности измерения КПД, расширение функциональных возможностей по величине передаваемой мощности. В способе нагрузки синхронной машины в качестве нагрузочной машины используют асинхронную машину с фазным ротором. Возбуждение ротора осуществляют от источника трехфазного тока с независимо задаваемой нулевой частотой, с поворотом поля ротора на любой заданный угол и возможностью нагрузки испытываемой машины в двигательном и генераторном режимах, в том числе и при углах нагрузки больше критического. 5 з.п. ф-лы, 7 ил.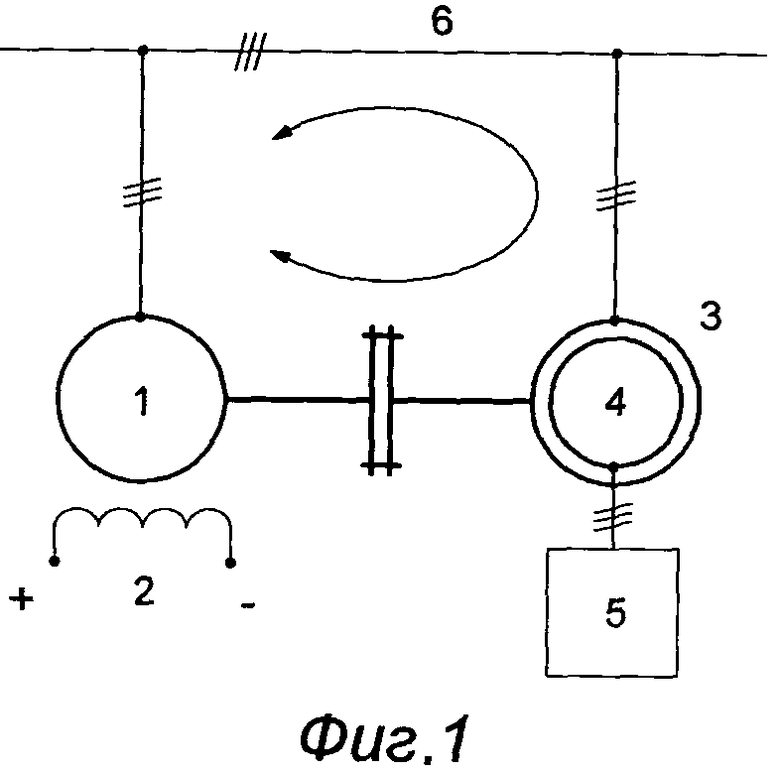
1. Способ нагрузки синхронных машин, заключающийся в механическом сопряжении валов испытываемой и нагрузочной машин через планетарную передачу, одна из которых работает в режиме двигателя, а другая - в режиме генератора с возвратом электрической энергии источнику питания, в котором нагрузка обеспечивается за счет поворота ротора нагрузочной машины посредством планетарной передачи, отличающийся тем, что взаимная нагрузка механически сопряженных машин с возвратом электрической энергии источнику питания достигается использованием в качестве нагрузочной машины асинхронной машины с фазным ротором, возбуждаемой со стороны ротора трехфазным током независимо задаваемой нулевой частоты с поворотом поля ротора на любой заданный угол с возможностью нагрузки испытываемых машин в двигательном или генераторном режиме, в том числе и углах нагрузки больше критического.
2. Способ нагрузки синхронных машин по п.1, отличающийся тем, что при взаимной нагрузке поворот поля ротора осуществляется на непрерывно меняющийся угол, что позволяет избежать несимметричного нагрева ротора нагрузочной машины по окружности, а токи нагружаемой машины задавать по среднеквадратичному значению.
3. Способ нагрузки синхронных машин по п.1, отличающийся тем, что в качестве источника покрытия потерь взаимно нагружаемых машин используется механическая энергия небольшого вспомогательного двигателя любого типа.
4. Способ нагрузки синхронных машин по п.1, отличающийся тем, что при использовании тарированной нагрузочной машины и измерении суммы потерь потребляемых от источника питания или вспомогательного двигателя при механическом покрытии потерь возможно определение коэффициента полезного действия нагружаемой машины с высокой точностью непосредственно при номинальной нагрузке.
5. Способ нагрузки синхронных машин по п.1, отличающийся тем, что при определении нагрузочных характеристик возможно определение нагрузочных добавочных потерь испытываемой машины при номинальной нагрузке с высокой точностью.
6. Способ нагрузки синхронных машин по п.1, отличающийся тем, что при включении между нейтральными точками статоров взаимно нагружаемых машин схем для измерения сопротивлений постоянному току при наличии переменной ЭДС возможно определение нагрева статора нагружаемой машины методом сопротивления и точный расчет потерь в обмотке статора непосредственно при нагрузке.
| Реле | 1932 |
|
SU31068A1 |
| Устройство для испытания электрических машин | 1974 |
|
SU562899A1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ БЕСКОЛЛЕКТОРНЫХ ЭЛЕКТРИЧЕСКИХ МАШИН ПЕРЕМЕННОГО ТОКА | 1992 |
|
RU2071608C1 |
| JP 56081466 A, 03.07.1981 | |||
| JP 56073367 A, 18.08.1981 | |||
| US 6791332 B2, 14.04.2004 | |||
| КR 1020100130326 A, 13.12.2010 | |||
| US 4335619 A1, 22.06.1982 | |||

