Изобретение относится к электротехнике, конкретно к управляемому электроприводу, и может быть исопользовано для привода тягового состава, в следящих системах, автоматических линиях и механизмах с широким диапазоном изменения частоты вращения.
Известна схема привода, содержащая два асинхронных двигателя с фазными роторами, сидящими на общем валу, и регулировочными реостатами в цепях роторов, причем одна машина работает в двигательном режиме, а вторая - в режиме противотока [1].
Недостатком такой схемы являются невысокие энергетические показатели привода, что связано с потерями мощности при регулировании частоты вращения реостатом в роторе.
Наиболее близким техническим решением к предлагаемому является электрический привод переменного тока, выполненный из двух асинхронных двигателей с фазными роторами, сидящими на общем валу и включенными последовательно через резисторы с дросселями, причем регулирование частоты вращения осуществляется за счет поворота статора одного из двигателей [2].
Однако наличие поворотного статора у одного из двигателей усложняет конструкцию привода. Другой недостаток прототипа заключается в ограниченном диапазоне изменения частоты вращения, что связано с потеpями мощности в резисторах.
Цель изобретения - расширение диапазона регулирования частоты вращения и упрощение конструкции привода.
Цель достигается тем, что в известный электрический привод переменного тока, содержащий две машины с трехфазными электрически связанными обмотками на статорах и жестко соединенными валами роторов, введены k-фазный управляемый выпрямитель с входами для соединения с k-фазной сетью, источник питания постоянного тока и три симметричных управляемых ключа, каждый из которых включен последовательно в цепи соединения одноименных фаз статорных обмоток, роторы машин сдвинуты на 90 эл. градусов, а роторные обмотки выполнены однофазными, причем роторная обмотка второй машины подключена к выходу источника питания постоянного тока, а роторная обмотка первой машины соединена с выходом k-фазного управляемого выпрямителя, где k=1,3.
Кроме того, к достоинствам заявляемого привода следует отнести простоту управления частотой вращения, отсутствие необходимости в специальных мерах для осуществления пуска, устойчивость работы на "ползучих" частотах вращения, а также возможность питания как от трехфазной, так и от однофазной сети что позволяет расширить его область применения.
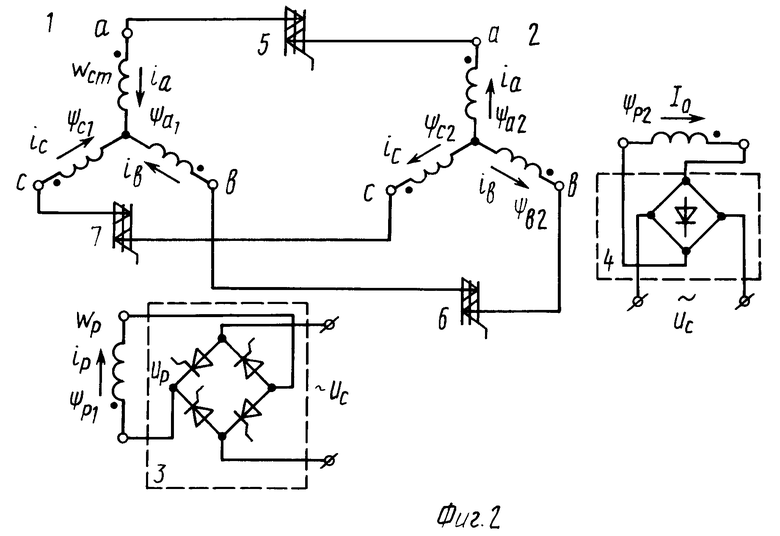
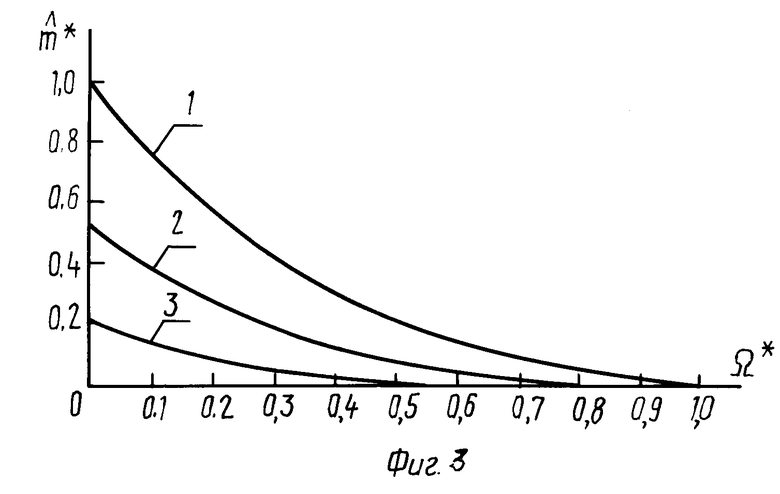
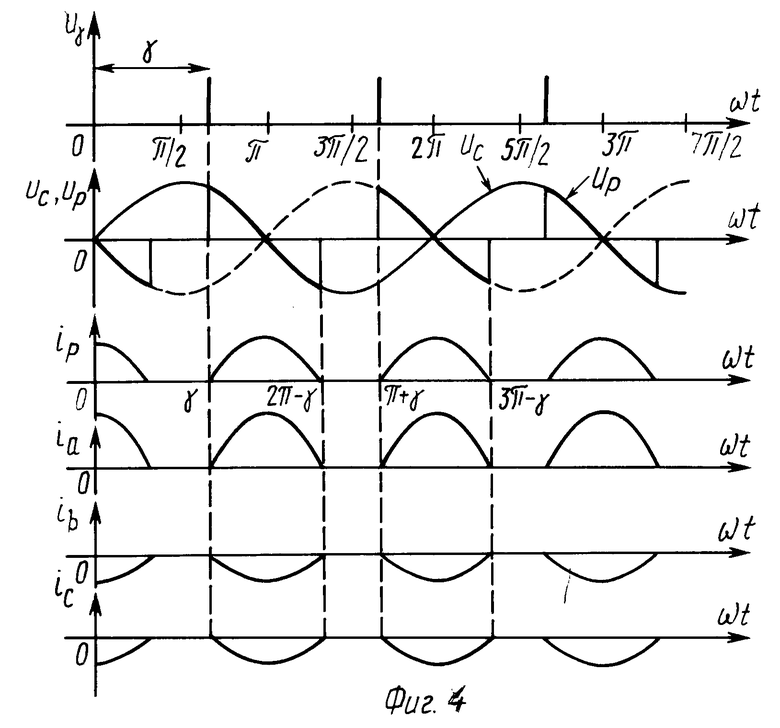
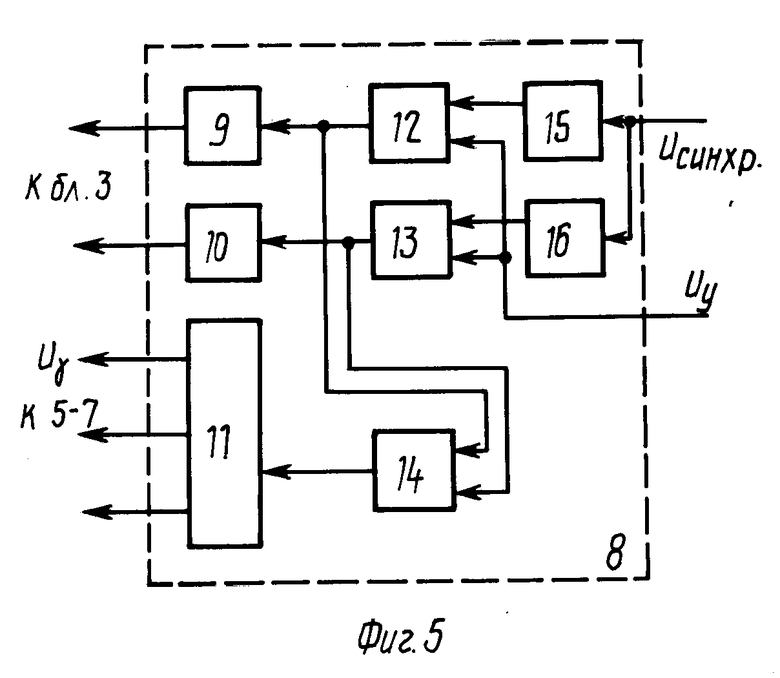
На фиг.1 представлена схема предлагаемого электрического привода переменного тока; на фиг.2 - условно положительные направления токов и потокосцеплений; на фиг.3 - семейство электромеханических характеристик; на фиг.4 - временные диаграммы работы привода в режиме заторможенного ротора для случая питания от однофазной сети, где Uс - напряжение сети; Uр - напряжение на роторной обмотке первой машины; Uγ - сигнал на выходах устройства управления; γ - угол фазового регулирования; iа,в,с,р - переменные токи обмоток; Iо - постоянный ток роторной обмотки второй машины; а1,в1,с1,а2, в2, с2,р1,р2 - потокосцепления обмоток; Wр,Wст - количество витков соответственно роторной обмотки и одной фазы статорной обмотки; на фиг.5 - вариант функциональной схемы устройства управления.
В состав электрического привода переменного тока входят синхронные машины 1 и 2 с трехфазной обмоткой на статоре и однофазной - на роторе, управляемый выпрямитель 3, источник питания постоянного тока 4, симисторы 5-7, устройство управления 8, усилители-формирователи 9-11, нуль-органы 12-13, сумматор 14 и фазосдвигающие устройства 15-16.
Валы роторов машин 1 и 2 жестко соединены и сдвинуты на 90 эл.градусов. Выход источника питания 4 присоединен к роторной обмотке машины 2, а его вход подключен к сети. Симисторы 5-7 соединяют одноименные фазы статорных обмоток машин 1 и 2. Роторная обмотка машины 1 подключена к выходу выпрямителя 3, входами своими соединенного с сетью. Входы фазосдвигающих устройств 15 и 16 соединены между собой и подключены к напряжению синхронизации. Выход фазосдвигающего устройства 15 соединен с одним из входов нуль-органа 12, а выход фазосдвигающего устройства 16 подключен к одному из входов нуль-органа 13. Вторые входы нуль-органов 12-13 соединены с напряжением управления, а их выходы подключены к входам усилителей-формирователей соответственно 9-10. Один из входов сумматора 14 соединен с выходом нуль-органа 12, а другой вход подключен к выходу нуль-органа 13, выход сумматора 14 соединен с входом усилителя-формирователя 11. Выходы усилителей-формирователей 9-10 подключены к управляющим входам выпрямителя 3, а выходы усилителя-формирователя 11 соединены с управляющими электродами симисторов 5-7.
Работа привода для случая подключения его к однофазной сети (k=1). Управляемый выпрямитель 3 выполняется по однофазной мостовой двухполупериодной симметричной схеме. В качестве машин 1 и 2 применены синхронные машины, источник питания 4 построен в виде диодного моста, а в качестве симметричных управляемых ключей 5-7 взяты симисторы.
Для положительных направлений токов и потокосцеплений, принятых на фиг. 2, уравнения рассматриваемого привода имеют вид: = L
= L ia-
ia-  cos
cos
 = L
= L iв-
iв-  cos(θ-2/3)
cos(θ-2/3)
 = L
= L ic-
ic-  cos(θ+2/3)
cos(θ+2/3)
 =
=  - iacosθ - iвcos(θ-2/3) - iccos(θ+2π/3)
- iacosθ - iвcos(θ-2/3) - iccos(θ+2π/3)
 = L
= L ia+
ia+  sin
sin
 = L
= L iв+
iв+  sin(θ-2π/3)
sin(θ-2π/3) (1)
(1) = L
= L ic+
ic+  sin(θ+2π/3)
sin(θ+2π/3)
 =
=  + iasinθ + iвsin(θ-2π/3) + icsin(θ+2π/3)
+ iasinθ + iвsin(θ-2π/3) + icsin(θ+2π/3)
m2= Jo =
=  Jo(iacosθ+bcos(θ-2π/3)+i
Jo(iacosθ+bcos(θ-2π/3)+i cos(θ+2π/3)) ,
cos(θ+2π/3)) ,
m1= -ip =
=  ip(iasinθ+iвsin(θ-2π/3)+i
ip(iasinθ+iвsin(θ-2π/3)+i sin(θ+2π/3)) , где L - индуктивность одной фазы статорной обмотки;
sin(θ+2π/3)) , где L - индуктивность одной фазы статорной обмотки;
n =  - коэффициент трансформации между статорной и роторной обмотками при совпадении их осей;
- коэффициент трансформации между статорной и роторной обмотками при совпадении их осей;
θ - угол сдвига между осями обмотки ротора и фазы "а" статора машины 1;
m1 и m2 - мгновенные значения моментов, развиваемых машинами 1 и 2.
Уравнения (1) получены для случая использования одинаковых машин с неявнополюсными роторами при допущении линейности магнитной системы и пренебрежении рассеиванием и потерями в стали. Разница в формулах для потокосцеплений и моментов машин 1 и 2, связанная с наличием либо sin θ , либо cos θ , обусловлена пространственным сдвигом роторов машин на 90 эл. градусов.
Дифференциальные уравнения цепей статорных обмоток и роторной обмотки машины 1 при открытых тиристорах одного плеча моста выпрямителя 3 и симисторах 5-7 без учета активного сопротивления обмоток имеют вид: -
-  = 0 , l = a, в, c (2)
= 0 , l = a, в, c (2) = Umsinωt где ω , Um - частота и амплитуда напряжения сети Uс.
= Umsinωt где ω , Um - частота и амплитуда напряжения сети Uс.
Решение дифференциальных уравнений (2) с учетом (1) для θ =const и начальных условий ω t=γ , iр=iа=iв=iс=0, что соответствует закрытому состоянию тиристоров выпрямителя 3 и симисторов 5-7 в момент подачи импульса отпирания, составляет:
ia =  ipcosθ
ipcosθ
iв =  ipcos (θ-2π/3)
ipcos (θ-2π/3)
ic =  ipcos (θ+2π/3) (3)
ipcos (θ+2π/3) (3)
ip =  (cosγ-cosωt)
(cosγ-cosωt)
Запирание ключей происходит естественным образом по достижении токами обмоток нулевого значения, при этом ω t=2 π-γ .
Момент m, развиваемый приводом, равен сумме моментов, создаваемых машинами 1 и 2. После подстановки значений токов из (3) в уравнения (1) для моментов и тригонометрических преобразований имеем
m = m1+m2=  (cosγ-cosωt).
(cosγ-cosωt).
Результирующий момент, таким образом, в режиме заторможенного ротора не зависит от угла θ и имеет пульсирующий характер с ненулевым средним значением, определяемым на интервале существования токов как =
= 
 mdωt =
mdωt =  [(π-γ)cosγ+sinγ] (4)
[(π-γ)cosγ+sinγ] (4)
Пуск привода осуществляется за счет синхронного изменения фазы управляющих импульсов Uз на тиристоры одного плеча мостового выпрямителя 3 и симисторы 5-7 в диапазоне от π до π/2 в первом полупериоде и от 2π до 3 π /2 во втором полупериоде. Максимальное значение пускового момента достигается согласно (4) при γ = π/2: =
=  .
.
По мере увеличения частоты вращения ротора Ω =  от нулевой в токах появляются дополнительные составляющие, обусловленные ЭДС вращения:
от нулевой в токах появляются дополнительные составляющие, обусловленные ЭДС вращения:
Δia = -  (sinθ-sinθγ)
(sinθ-sinθγ)
Δiв = -  (sin(θ-2π/3)-sin(θγ-2π/3))
(sin(θ-2π/3)-sin(θγ-2π/3))
Δic = -  (sin(θ+2π/3)-sin(θγ+2π/3))
(sin(θ+2π/3)-sin(θγ+2π/3))
Δip = Josin(θ-θγ) , что приводит к уменьшению момента с роcтом Ω . Здесь θ - текущий угол сдвига, а θγ - его значение в момент подачи управляющего импульса.
Возможность регулирования частоты вращения ротора в широких пределах следует из вида семейства электромеханических характеристик (фиг.3), рассчитанных для фиксированных значений угла γ в относительных единицах, =
=  , Ω* =
, Ω* =  и Jo =
и Jo = 
Устройство управления 9 реализует принцип вертикального управления. Напряжение Uсинх синхронизации, синфазное с силовым напряжением сети Uс,поступает на фазосдвигающие устройства 15, осуществляющее сдвиг фазы на π /2, и 16, осуществляющее сдвиг на 3 π/2. Сдвинутые по фазе напряжения используются в качестве опорных при сравнении их с напряжением Uупруправления. В момент их равенства посредством нуль-органов 12-13 создаются управляющие сигналы, которые после усилителей-формирователей 9-10 поступают на тиристоры одного плеча моста выпрямителя 3. Эти же сигналы после суммирования в блоке 14 подаются на усилитель-формирователь 11, затем на управляющие электроды симисторов 5-7.
Для осуществления реверса требуется изменить фазу тока iр на обратную. Это может быть достигнуто, например, за счет выполнения выпрямителя 3 по реверсивной схеме с соответствующими изменениями в устройстве управления 8.
При питании от трехфазной сети (m=3) управляемый выпрямитель 3 выполняется по трехфазной мостовой симметричной схеме. Угол отпирания тиристоров фазы "а" выпрямителя при этом находится в диапазоне 2 π /3 ≅γ<π , а углы управления тиристорами фаз "в" и "с" сдвинуты соответственно на 2π /3 и 4π /3. Управляющие импульсы на симисторы подаются в моменты γ ,γ +2 π /3 и γ +4 π /3.
В предлагаемом приводе возможно также использование обращенных машин, в которых однофазные обмотки расположены на статорах, а трехфазные - на роторах. В качестве обращенных машин могут быть применены конструкции асинхронных двигателей с фазным ротором и трехфазными статорными обмотками, соединенными по однофазной схеме.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ПЕРЕМЕННОГО ТОКА | 1993 |
|
RU2085017C1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| Стенд для обкатки и испытания двигателя внутреннего сгорания | 1980 |
|
SU1002875A2 |
| Система возбуждения асинхронизированной синхронной машины | 2021 |
|
RU2761246C1 |
| АВТОНОМНАЯ ЭЛЕКТРОМАШИННАЯ УСТАНОВКА | 1990 |
|
RU2046042C1 |
| СТЕНД ДЛЯ НАГРУЖЕНИЯ СИНХРОННЫХ МАШИН ПРИ ИСПЫТАНИЯХ | 1991 |
|
SU1818984A1 |
| СПОСОБ СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА (ВАРИАНТЫ) | 2000 |
|
RU2164053C1 |
| ТРЁХФАЗНЫЙ ИНВЕРТОР, СОСТОЯЩИЙ ИЗ ДВУХ ОДНОФАЗНЫХ | 2017 |
|
RU2656878C1 |
| СПОСОБ ИМПУЛЬСНО-ЧАСТОТНОГО РЕГУЛИРОВАНИЯ ЭЛЕКТРОПРИВОДА ПЕРЕМЕННОГО ТОКА С ИСТОЧНИКОМ ИЗМЕНЯЕМОЙ ЧАСТОТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2574380C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭДС РОТОРА СИНХРОННЫХ И ТОКА РОТОРА АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ (ЕГО ВАРИАНТЫ) | 2001 |
|
RU2207578C2 |
Использование: в приводах тягового состава, следящих системах автоматических линиях и механизмах. Сущность: электрический привод переменного тока с двумя синхронными машинами 1, 2 снабжен k-фазным управляемым выпрямителем 3, выходом подключенным к однофазной обмотке ротора синхронной машины 1. Роторная обмотка синхронной машины 3 соединена с источником 4 питания постоянного тока. Роторы машин сдвинуты на 90 эл.градусов, а статорные обмотки пофазно соединены через симисторы 5 - 7 последовательно. Такое выполнение позволило упростить привод и расширить его диапазон регулирования частоты вращения. 5 ил.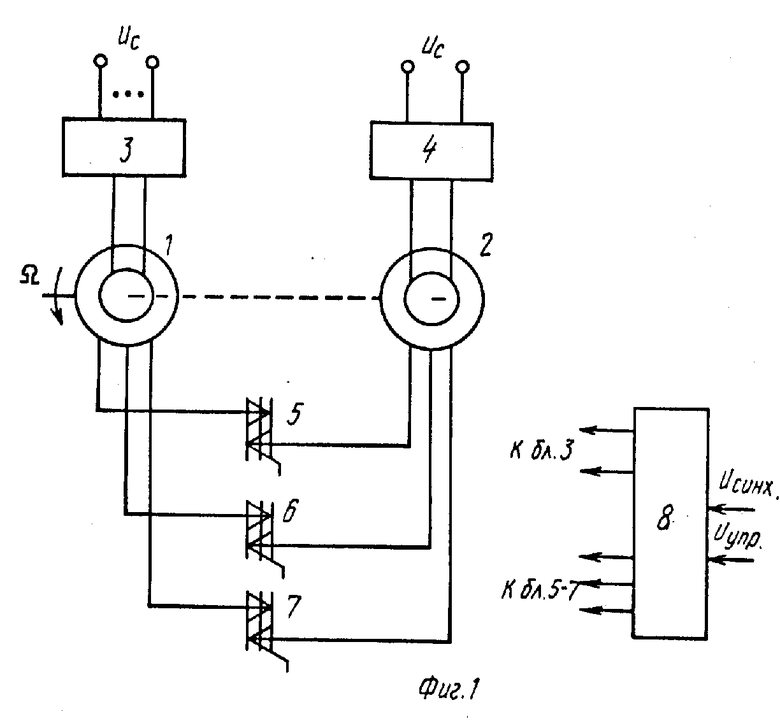
ЭЛЕКТРИЧЕСКИЙ ПРИВОД ПЕРЕМЕННОГО ТОКА, содержащий две машины с трехфазными электрически связанными обмотками на статорах и жестко соединенными валами роторов, отличающийся тем, что в него введены k-фазный управляемый выпрямитель с входами для соединения с k-фазной сетью, источник питания постоянного тока и три симметричных управляемых ключа, каждый из которых включен последовательно в цепи соединения одноименных фаз статорных обмоток, роторы машин сдвинуты на 90 эл.град., а роторные обмотки выполнены однофазными, причем роторная обмотка второй машины подключена к выходу источника питания постоянного тока, а роторная обмотка первой машины соединена с выходом k-фазного управляемого выпрямителя, где k=1,3.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Сабинин Ю.А | |||
| Электромашинные устройства автоматики | |||
| Л.:Энергоатомиздат, 1988, с.296. | |||
