Изобретение относится к транспортным средствам для перевозки навалочных грузов в лесозаготовительной промышленности, преимущественно к средствам транспортировки лесосечных отходов.
Известно транспортное средство по патенту РФ [1], принятое за аналог, содержащее самоходное шасси гусеничной манипуляторной трелевочной машины, на остове которого размещен кран-манипулятор со стрелой и грузозахватным органом в виде грейферного захвата лепесткового типа, и грузовую платформу в виде кузова с передней стенкой, боковыми бортами и днищем, причем днище кузова грузовой платформы выполнено с возможностью поворота в вертикальной плоскости относительно оси, размещенной вблизи задней кромки кузова и перпендикулярной продольной оси кузова, а к передней части днища прикреплен канат, запасованный в блок, установленный на передней стенке кузова грузовой платформы, при этом второй конец каната закреплен неподвижно на остове самоходного шасси. Увеличенный полезный объем кузова позволяет реализовывать повышенные рейсовые нагрузки, а применение днища кузова, принудительно поворачиваемого в вертикальной плоскости за счет кинематической связи с остовом шасси посредством каната, обеспечивает эффективную разгрузку кузова самосвальным методом. Недостатком известного транспортного средства является сложность конструкции и пониженная проходимость, что обусловлено размещением грузовой платформы не только на остове самоходного шасси, но и на дополнительных колесных тележках.
Известно также транспортное средство по патенту РФ [2], принятое за прототип, содержащее гусеничное шасси манипуляторной машины повышенной грузоподъемности с остовом, краном-манипулятором со стрелой и грузозахватным органом, грузовую платформу с рамой и систему самосвальной разгрузки в виде переднего ролика, снабженного осью, закрепленной на рамке, шарнирно установленной на остове шасси с возможностью гидроуправляемого поворота в продольной вертикальной плоскости, причем в качестве гидропривода рамки использованы несколько гидроцилиндров, одни концы которых закреплены на остове самоходного шасси, другие же прикреплены к рамке, и заднего ролика, ось которого закреплена на торце рамы грузовой платформы так, что наружная поверхность качения заднего ролика расположена ниже верхней плоскости рамы грузовой платформы. Недостатком известного транспортного средства является неприспособленность к перевозке навалочных грузов, в том числе лесосечных отходов, что обусловлено конструкциями грузовой платформы, не имеющей кузова, и грузозахватного органа, не позволяющего осуществлять эффективное зачерпывание навалочных грузов.
Технический результат данной работы - обеспечение возможности перевозки навалочных грузов.
Указанный технический результат в предлагаемом транспортном средстве достигается тем, что грузозахватный орган крана-манипулятора выполняется в виде грейферного захвата лепесткового типа, а грузовая платформа снабжается дополнительным съемным кузовом с днищем, передней и боковыми стенками, и выполнена с механизмом фиксации кузова от продольного перемещения, при этом днище дополнительного съемного кузова выполнено с возможностью поворота в вертикальной плоскости относительно оси, размещенной вблизи задней кромки кузова и перпендикулярной продольной оси кузова, а к передней части днища прикреплен канат, запасованный в блок, установленный на передней стенке кузова, причем второй конец каната закреплен неподвижно на передней стенке грузовой платформы.
Механизм фиксации кузова от продольного смещения предлагается выполнить в виде пластин, жестко закрепленных на грузовой платформе побортно между передней стенкой платформы и ее боковыми стойками, и снабженных пазами криволинейного профиля, проушин, установленных на наружной стороне передней стенки кузова, и фиксирующего пальца в виде стержня цилиндрической формы, один конец которого снабжен шляпкой, а другой - отверстием для установки шплинта.
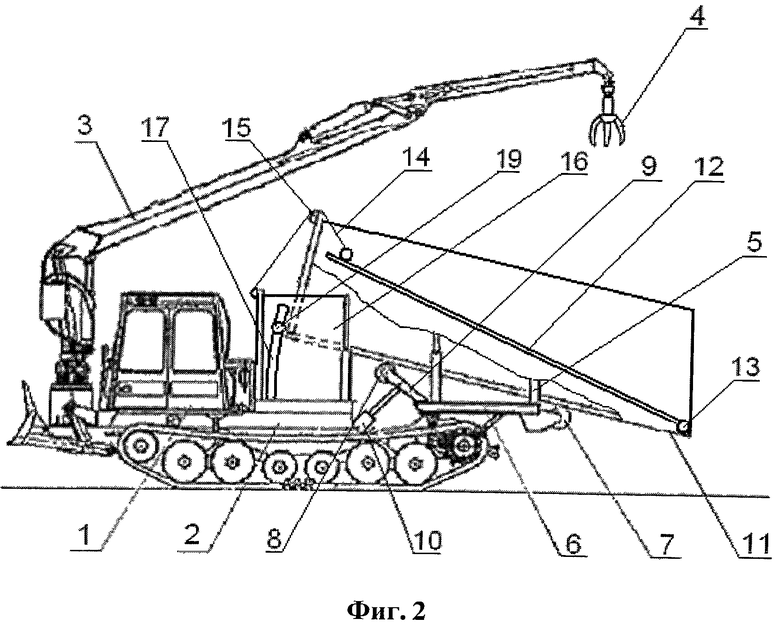
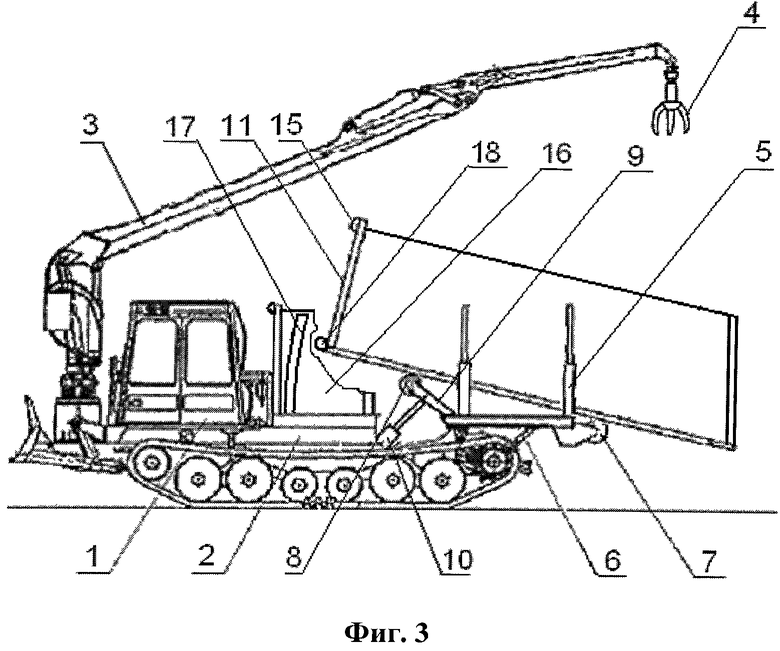
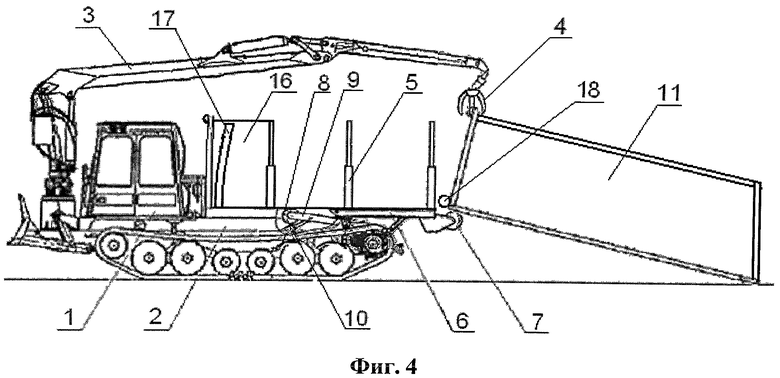
Изобретение поясняется чертежами, где на фиг.1 изображено предлагаемое транспортное средство при грузовом ходе; на фиг.2 - транспортное средство при самосвальной разгрузке навалочных грузов; на фиг.3 - транспортное средство при сбрасывании дополнительного съемного кузова с грузовой платформы; фиг.4 - транспортное средство при натаскивании дополнительного съемного кузова на грузовую платформу.
Транспортное средство содержит гусеничное шасси 1 манипуляторной машины повышенной грузоподъемности с остовом 2, в передней части которого размещен манипулятор 3 со стрелой и грузозахватным органом 4 в виде грейферного захвата лепесткового типа, а в средней и задней частях - размещена грузовая платформа 5. Рама 6 грузовой платформы 5 снабжена роликом 7, установленным в горизонтальной плоскости перпендикулярно продольной оси рамы 6, причем его ось неподвижно закреплена в задней части рамы платформы 5 так, что наружная поверхность качения ролика 6 расположена ниже верхней плоскости рамы 6 платформы 5.
В центральной части грузовой платформы 5 размещен ролик 8, установленный в горизонтальной плоскости перпендикулярно продольной оси рамы 6, при этом ось ролика 8 закреплена на рамке 9, снабженной гидроприводом поворота и установленной шарнирно на остове 2 шасси 1. Гидропривод поворота рамки 9 выполнен в виде нескольких (установленных параллельно) гидроцилиндров 10, одни концы которых закреплены на остове 2 шасси 1, а другие - прикреплены к рамке 9.
Грузовая платформа 5 снабжена дополнительным съемным кузовом 11 с днищем 12, передней и боковыми стенками, и выполнена с механизмом фиксации кузова от продольного перемещения, при этом днище 12 выполнено с возможностью поворота в вертикальной плоскости относительно оси 13, размещенной вблизи задней кромки кузова 11 и перпендикулярной продольной оси кузова 11, а к передней части днища 12 прикреплен канат 14, запасованный в блок 15, установленный на передней стенке кузова 11, причем второй конец каната 14 закреплен неподвижно на передней стенке грузовой платформы 5.
Механизм фиксации кузова 11 от продольного смещения выполнен в виде пластин 16, жестко закрепленных на грузовой платформе 5 побортно между передней стенкой платформы 5 и ее боковыми стойками, и снабженных пазами 17 криволинейного профиля, проушин 18, установленных на наружной стороне передней стенки кузова 11, и фиксирующего пальца 19 в виде стержня цилиндрической формы, один конец которого снабжен шляпкой, а другой - отверстием для установки шплинта.
Транспортное средство работает следующим образом.
При необходимости работы с навалочными грузами, например, лесосечными отходами, транспортное средство подготавливается путем установки дополнительного съемного кузова 11 на грузовую платформу 5. Грузозахватным органом 4 манипулятора 3 передняя часть кузова 11 поднимается и устанавливается на наружную поверхность качения ролика 7, затем срабатыванием стрелы манипулятора 3 осуществляется натаскивание кузова 11 на грузовую платформу 5. После совмещения проушин 18 с пазами 17 в пластинах 16 в пазы 16 и проушины 18 устанавливается фиксирующий палец 19 до упора шляпкой в пластину 16 и осуществляется его шплинтовка. Канат 14, прикрепленный одним концом к передней части днища 12 кузова 11, запасовывается в блок 15 и другим своим концом закрепляется неподвижно на передней стенке грузовой платформы 5.
При холостом ходе, погрузке навалочных грузов и грузовом ходе транспортного средства рамка 9 находится в крайнем горизонтальном положении (штоки гидроцилиндров 10 втянуты). Дополнительный съемный кузов 11 опирается на верхнюю плоскость рамы 6 грузовой платформы 5, не касаясь наружной поверхности качения ролика 7. Погрузка навалочных грузов (лесосечных отходов) производится в кузов 11 при помощи грузозахватного органа 4 в виде грейферного захвата лепесткового типа. Увеличение до шести числа опорных катков по борту, обеспечивая повышенную грузоподъемность шасси 1, позволяет значительно поднять рейсовую нагрузку транспортного средства при грузовом ходе.
При самосвальной разгрузке навалочных грузов рамка 9 поворачивается гидроприводом в продольной вертикальной плоскости (штоки гидроцилиндров 10 вытягиваются). Ролик 8 получает вертикальное перемещение над верхней плоскостью рамы 6 платформы 5 и приподнимает над ней переднюю часть дополнительного съемного кузова 11. Фиксирующий палец 19 при этом перемещается по криволинейным пазам 17 пластин 16. Кривизна пазов 17 подбирается таким образом, чтобы исключить "закусывание" пальца 19. В результате наклона кузова 11 относительно опорной поверхности транспортного средства задняя часть кузова 11 взаимодействует с внешней поверхностью качения ролика 7, благодаря чему создаются условия для скатывания кузова 11. Удержание кузова 11 на грузовой платформе 5 обеспечивается взаимодействием фиксирующего пальца 19 с криволинейными пазами 17 пластин 16. Перемещение пальца 19 вдоль собственной оси исключается: в одну сторону благодаря шляпке пальца 19, в другую - благодаря шплинту. Блок 15 перемещается вверх вместе с передней стенкой кузова 11 относительно рамы 6 грузовой платформы 5. Так как один конец каната 14 удерживается на передней стенке грузовой платформы 5, то при перемещении блока 15 происходит перемотка каната 14: длина ветви каната 14 на участке от передней стенки грузовой платформы 5 до блока 15 увеличивается, а длина ветви каната 14 на участке от передней части днища 12 кузова 11 до блока 15 уменьшается. При этом днище 12 кузова 11 поворачивается в вертикальной плоскости вокруг оси 13, получая значительный наклон относительно опорной поверхности транспортного средства, благодаря чему создаются благоприятные условия для самосвальной разгрузки навалочных грузов. Кинематическая связь передней части днища 12 кузова 11 с передней стенкой грузовой платформы 5 посредством каната 14 способствует эффективности самосвальной разгрузки навалочных грузов, обеспечивая потребный угол наклона днища 12 кузова 11 при уменьшенном времени подъема передней части кузова 11.
По окончании разгрузки навалочных грузов рамка 9 перемещается гидроприводом в крайнее горизонтальное положение (штоки гидроцилиндров 10 втянуты). Передняя часть кузова 11 опускается, причем фиксирующий палец 19 движется в криволинейных пазах 17 пластин 16 как в направляющих, блок 15 перемещается вниз вместе с передней стенкой кузова 11. Днище 12 под действием собственной силы тяжести поворачивается вокруг оси 13 в направлении, противоположном описанному ранее, и занимает горизонтальное положение, вызывая при этом соответствующую перемотку каната 14.
При исчерпании необходимости работы с навалочными грузами транспортное средство может быть быстро переоборудовано для транспортировки сортиментов путем сбрасывания дополнительного кузова 11 с грузовой платформы 5. Для этого фиксирующий палец 19 расшплинтовывается и вынимается из пазов 16 и проушин 18, канат 14 отсоединяется от передней стенки грузовой платформы 5. Рамка 9 поворачивается гидроприводом в продольной вертикальной плоскости (штоки гидроцилиндров 10 вытягиваются). Ролик 8 получает вертикальное перемещение над верхней плоскостью рамы 6 платформы 5 и приподнимает над ней переднюю часть дополнительного съемного кузова 11. В результате наклона кузова 11 относительно опорной поверхности транспортного средства, задняя часть кузова 11 взаимодействует с внешней поверхностью качения ролика 7, благодаря чему создаются условия для скатывания кузова 11. Кроме сбрасывания дополнительного кузова 11 вместо грузозахватного органа 4 в виде грейферного захвата лепесткового типа устанавливается грейферный захват для сортиментов.
Экономический эффект достигается за счет роста производительности при перевозке навалочных грузов благодаря снижению времени на разгрузку самосвальным методом. Учитывая, что при самосвальной разгрузке не используется манипулятор, следует ожидать снижения утомляемости оператора и повышения ресурса манипулятора. Кроме того, простота переоборудования под транспортировку сортиментов позволяет существенно расширить функциональные возможности транспортного средства.
Источники информации
1. Патент №2449903 РФ на изобретение, МПК B60P 3/40, B60P 1/30, B62D 53/00. Транспортное средство / Войнаш С.А., Войнаш А.С.; заявитель и патентообладатель: Войнаш С.А., Войнаш А.С. (RU). -№2010138017/11; заявл. 13.09.2010; опубл. 10.05.2012. Бюл. №13.
2. Патент №2418695 РФ на изобретение, МПК B60P 3/40, B60P 1/52, A01G 23/08. Сортиментовоз / Войнаш С.А., Войнаш А.С; заявитель и патентообладатель: Войнаш С.А., Войнаш А.С.(RU). - №2010107069/11; заявл. 25.02.2010; опубл. 20.05.2011, Бюл. №14. - С. 547.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО | 2010 |
|
RU2449903C1 |
| ПОГРУЗОЧНО-ТРАНСПОРТНОЕ СРЕДСТВО | 2011 |
|
RU2449902C2 |
| ПОГРУЗОЧНО-ТРАНСПОРТНОЕ СРЕДСТВО | 2013 |
|
RU2537047C2 |
| СОРТИМЕНТОВОЗ | 2021 |
|
RU2758072C2 |
| СОРТИМЕНТОВОЗ | 2021 |
|
RU2771988C1 |
| СОРТИМЕНТОВОЗ | 2021 |
|
RU2771990C2 |
| ПОГРУЗОЧНО-ТРАНСПОРТНОЕ СРЕДСТВО | 2018 |
|
RU2699956C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2021 |
|
RU2758071C2 |
| СОРТИМЕНТОВОЗ | 2011 |
|
RU2461472C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2013 |
|
RU2536613C2 |
Изобретение относится к транспортным средствам для перевозки навалочных грузов в лесозаготовительной промышленности, преимущественно к средствам транспортировки лесосечных отходов. Транспортное средство содержит гусеничное шасси (1) с остовом (2), на котором размещен манипулятор (3) с грузозахватным органом (4)в виде грейферного захвата лепесткового типа и грузовая платформа (5), рама (6) которой снабжена роликом (7). В центральной части платформы (5) размещен ролик (8), ось которого установлена на гидроуправляемой рамке (9). Платформа (5) снабжена съемным кузовом (11) с днищем (12), выполненным с возможностью поворота в вертикальной плоскости относительно оси (13), размещенной вблизи задней кромки кузова (11), а к передней части днища (12) прикреплен канат (14), запасованный в блок (15), установленный на передней стенке кузова (11). Второй конец каната (14) закреплен неподвижно на передней стенке платформы (5). Обеспечивается возможность перевозки навалочных грузов. 1 з.п. ф-лы, 4 ил.
1. Транспортное средство, содержащее гусеничное шасси манипуляторной машины повышенной грузоподъемности с остовом, краном-манипулятором со стрелой и грузозахватным органом, грузовую платформу с рамой и систему самосвальной разгрузки в виде переднего ролика, снабженного осью, закрепленной на рамке, шарнирно установленной на остове шасси с возможностью гидроуправляемого поворота в продольной вертикальной плоскости, причем в качестве гидропривода рамки использованы несколько гидроцилиндров, одни концы которых закреплены на остове самоходного шасси, другие же прикреплены к рамке, и заднего ролика, ось которого закреплена на торце рамы грузовой платформы так, что наружная поверхность качения заднего ролика расположена ниже верхней плоскости рамы грузовой платформы, отличающееся тем, что грузозахватный орган крана-манипулятора выполнен в виде грейферного захвата лепесткового типа, а грузовая платформа снабжена дополнительным съемным кузовом с днищем, передней и боковыми стенками и выполнена с механизмом фиксации кузова от продольного перемещения, при этом днище дополнительного съемного кузова выполнено с возможностью поворота в вертикальной плоскости относительно оси, размещенной вблизи задней кромки кузова и перпендикулярной продольной оси кузова, а к передней части днища прикреплен канат, запасованный в блок, установленный на передней стенке кузова, причем второй конец каната закреплен неподвижно на передней стенке грузовой платформы.
2. Транспортное средство по п.1, отличающееся тем, что механизм фиксации кузова от продольного смещения выполнен в виде пластин, жестко закрепленных на грузовой платформе побортно между передней стенкой платформы и ее боковыми стойками и снабженных пазами криволинейного профиля, проушин, установленных на наружной стороне передней стенки кузова, и фиксирующего пальца в виде стержня цилиндрической формы, один конец которого снабжен шляпкой, а другой - отверстием для установки шплинта.
| СОРТИМЕНТОВОЗ | 2010 |
|
RU2418695C1 |
| Защитная маска электросварщика | 1982 |
|
SU1264937A1 |
| CN 2866240 Y, 07.02.2007; | |||
| Комьеотгребатель к хлопкоуборочной машине | 1947 |
|
SU75173A1 |

