ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение, в общем, относится к устройствам для сбора урожая. Более конкретно, оно относится к системе отслеживания уровня наполнения накопительного бункера уборочного комбайна.
УРОВЕНЬ ТЕХНИКИ
Поскольку сельскохозяйственные работы становятся более сложными, управление работами по сбору урожая, включающими в себя машинную логистику, такую как емкость наполнения, становится более критичным для производительности труда и рентабельности. В одной попытке улучшить работу уборочная машина может включать в себя датчики, чтобы предупреждать оператора, когда уровень наполнения зернового бункера достигает полной емкости. Выражение «уборочная машина» используется в данном документе, чтобы включать в себя комбайны или другие сельскохозяйственные транспортные средства для уборки и временного хранения собранного урожая.
При обычной работе собранный урожай сбрасывается или выгружается в зерновозку, грузовик или другое транспортное средство для перевозки и хранения для транспортировки на рынок или в другой пункт назначения, когда зерновой бункер достигает полной емкости. Операция разгрузки может включать в себя движение уборочной машины к местоположению транспортного средства для перевозки, припаркованного на дороге рядом с полем, с которого собирается урожай, или доставку транспортного средства для перевозки в местоположение рядом с полем, с которого собирается урожай, для разгрузки. В некоторых случаях уборочная машина может нуждаться в прекращении уборки урожая, в то время как уборочная машина все еще находится в поле, вследствие достижения полной емкости зернового бункера. В любом случае, уборка урожая прерывается, чтобы выгружать урожай.
Необходимо обеспечивать непрерывную уборку урожая и избегать непродуктивного времени, в течение которого уборочная машина простаивает во время ожидания разгрузки собранного урожая. Чтобы улучшать работы, дополнительная информация об уборке урожая будет полезной, чтобы планировать и/или координировать работы по уборке урожая. Дополнительная информация об уборке урожая может включать в себя способность точно определять, где в поле зерновой бункер станет полным. Такая информация предоставит возможность оператору определять, может ли уборочная машина убирать урожай до конца борозды без переполнения зернового бункера, и/или предоставит возможность оператору уведомлять оператора зерновозки, где располагаться, чтобы минимизировать расстояния для перемещения между уборочной машиной и транспортным средством для перевозки.
Настоящее изобретение направлено на преодоление одной или более проблем, которые изложены выше.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к способу отслеживания емкости для сбора урожая, включающему в себя обеспечение заданной емкости зернового бункера первой уборочной машины для первого зернового бункера первой уборочной машины в базу данных, определение первого уровня наполнения в реальном времени зернового бункера первой уборочной машины, определение первой скорости наполнения в реальном времени зернового бункера первой уборочной машины, обновление базы данных первым уровнем наполнения в реальном времени и первой скоростью наполнения в реальном времени, определение ожидаемого времени первой уборочной машины, когда зерновой бункер первой уборочной машины должен достигать заданной емкости зернового бункера первой уборочной машины, и обновление базы данных оставшимся временем первой уборочной машины.
Настоящее изобретение дополнительно относится к устройству для отслеживания емкости сбора урожая, включающему в себя первую уборочную машину и систему управления. Первая уборочная машина включает в себя систему указания емкости первой уборочной машины в реальном времени и систему скорости наполнения первой уборочной машины в реальном времени. Система управления включает в себя базу данных, выполненную с возможностью хранения динамической модели емкости для сбора урожая, и микропроцессор для получения информации от системы указания емкости первой уборочной машины в реальном времени, системы скорости наполнения первой уборочной машины в реальном времени и базы данных. Микропроцессор выполняет динамическую модель, чтобы в ответ определять оставшееся время первой уборочной машины, когда первая уборочная машина должна достигать заданной емкости зернового бункера первой уборочной машины, и обновляет базу данных оставшимся временем первой уборочной машины.
Настоящее изобретение также относится к способу определения скоростей наполнения в реальном времени зернового бункера с помощью датчика потока для измерения в реальном времени скорость потока зерна в зерновой бункер и умножения измеренной скорости потока на коэффициент калибровки для получения скорости наполнения в реальном времени. Коэффициент калибровки может быть модулирован при достижении уровнем наполнения заданного верхнего уровня. Это приспосабливает коэффициент калибровки к изменяющемуся урожаю и условиям сбора урожая.
Настоящее изобретение дополнительно относится к способу определения в реальном времени уровней наполнения после работы средства выгрузки для выгрузки зерна из зернового бункера. Этот способ может подразумевать установление скорости выгрузки средства выгрузки и продолжительности интервала времени, в течение которого средство выгрузки задействовано. Скорость выгрузки может быть адаптивно установлена из фактического времени выгрузки, необходимого, чтобы довести уровень наполнения с заданного верхнего до заданного нижнего уровня.
Таким образом, согласно одному аспекту предложен способ отслеживания и координирования работ по уборке урожая, включающий этапы, на которых определяют в реальном времени уровни наполнения одного или более зерновых бункеров одной или более соответствующих уборочных машин, используют датчик потока для определения в реальном времени скоростей наполнения одного или более зерновых бункеров одной или более соответствующих уборочных машин, обновляют базу данных уровнями наполнения в реальном времени и скоростями наполнения в реальном времени и определяют значение для разгрузки для одной или более уборочных машин для достижения заданной емкости зернового бункера уборочной машины, характеризующийся тем, что этап определения скоростей наполнения в реальном времени включает умножение измеренной скорости потока на коэффициент калибровки для получения скорости наполнения в реальном времени, при этом модулируют коэффициент калибровки по достижении уровнем наполнения заданного верхнего уровня.
Значение для разгрузки предпочтительно содержит промежуток времени для одной или более уборочных машин для достижения заданной емкости зернового бункера уборочной машины.
Значение для разгрузки предпочтительно представляет собой расстояние для одной или более уборочных машин (10) для уборки урожая для достижения заданной емкости зернового бункера уборочной машины.
Способ предпочтительно дополнительно включает этапы, на которых обновляют базу данных рабочей картой и обеспечивают позиционные данные в реальном времени для одной или более уборочных машин в базу данных, при этом значение для разгрузки содержит позицию места разгрузки, где одна или более уборочных машин достигают заданной емкости зернового бункера уборочной машины.
Способ предпочтительно дополнительно включает этап, на котором обеспечивают позиционные данные в реальном времени для одного или более транспортных средств для разгрузки.
Способ предпочтительно дополнительно включает этап, на котором составляют оптимальный маршрут передвижения для одного или более транспортных средств для разгрузки для пересечения с одной или более уборочными машинами для операции разгрузки.
Датчик потока предпочтительно содержит устройство измерения массового расхода и/или устройство измерения объемного расхода.
Модулирование коэффициента калибровки предпочтительно включает этапы, на которых интегрируют измеренную скорость потока в реальном времени до тех пор, пока уровень наполнения не достигнет заданного верхнего уровня, определяют соотношение объема зернового бункера на заданном верхнем уровне с интегрированной скоростью потока, адаптируют коэффициент калибровки к определяемому соотношению.
Адаптация коэффициента калибровки к определенному соотношению предпочтительно включает этап, на котором заменяют коэффициент калибровки значением, определяемым частично посредством предшествующего коэффициента калибровки и частично посредством определяемого соотношения.
Интегрирование измеренной в реальном времени скорости потока предпочтительно включает этапы, на которых интегрируют упомянутую скорость потока с уровня наполнения, достигающего заданный нижний уровень, до уровня наполнения, достигающего заданный верхний уровень, и объем на заданном верхнем уровне является объемом зернового бункера, находящимся между заданным верхним уровнем и заданным нижним уровнем.
Определение в реальном времени уровней наполнения предпочтительно включает этап, на котором определяют уровень наполнения в реальном времени после работы средства выгрузки для выгрузки зерна из зернового бункера и устанавливают уменьшение в уровне наполнения из скорости выгрузки средства выгрузки и временного интервала, в течение которого средство выгрузки задействовано.
Скорость выгрузки предпочтительно определяется из временного интервала, используемого для приведения уровня наполнения с заданного верхнего уровня до заданного нижнего уровня, при этом наличие зерна на заданном верхнем и/или нижнем уровне устанавливается соответствующими датчиками верхнего и/или нижнего уровня.
Наличие зерна на заданном нижнем уровне предпочтительно устанавливается в местоположении выше средства выгрузки и противоположном отверстию для выгрузки зернового бункера.
Согласно другому аспекту предложена система управления для работ по уборке урожая, содержащая систему отслеживания зерновой грузовместимости для определения одного или более объемов убираемого урожая в реальном времени одного или более соответствующих зерновых бункеров уборочных машин, базу данных, выполненную с возможностью приема одного или более объемов убираемого урожая в реальном времени, и микропроцессор, при этом микропроцессор содержит компьютерный программный продукт, воплощенный на машиночитаемом носителе, и выполнен с возможностью доступа к базе данных, запуска компьютерного программного продукта для формирования данных о работах по уборке урожая и осуществления вышеуказанного способа.
Согласно еще одному аспекту предложена система уборки урожая, содержащая одну или более уборочных машин, содержащих зерновые бункеры, и одну или более соответствующих вышеупомянутых систем управления.
Одним преимуществом настоящего изобретения является обеспечение для комбайнов улучшенной системы и способа отслеживания урожая.
Другим преимуществом настоящего изобретения является обеспечение системы и способа отслеживания, которые обеспечивают оператора информацией об уборке урожая, которая позволяет оператору определять, может ли уборочная машина убирать урожай до конца борозды без переполнения зернового бункера.
Другим преимуществом настоящего изобретения является обеспечение системы и способа отслеживания, которые обеспечивают оператора информацией об уборке урожая, которая позволяет оператору уведомлять оператора зерновозки, где располагаться, чтобы минимизировать расстояния для перемещения между уборочной машиной и грузовиком для перевозки зерна.
Другим преимуществом настоящего изобретения является обеспечение системы отслеживания и способа, которые оптимизируют работу оборудования для уборки урожая.
Другим преимуществом настоящего изобретения является обеспечение системы управления работами по уборке урожая, которая является простой для установки, экономичной для производства и легкой для использования.
Другие признаки и преимущества настоящего изобретения будут поняты из последующего более подробного описания предпочтительного варианта осуществления, взятого вместе с сопровождающими чертежами, которые иллюстрируют, посредством примера, принципы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
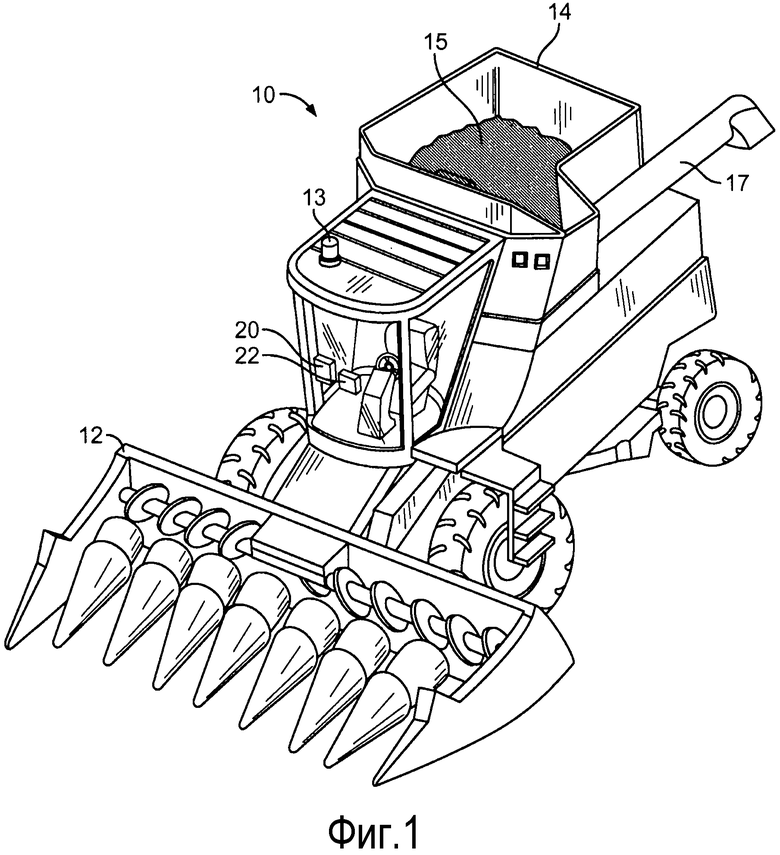
Фиг.1 представляет собой вид сверху в перспективе варианта осуществления уборочной машины с системой управления согласно настоящему изобретению.
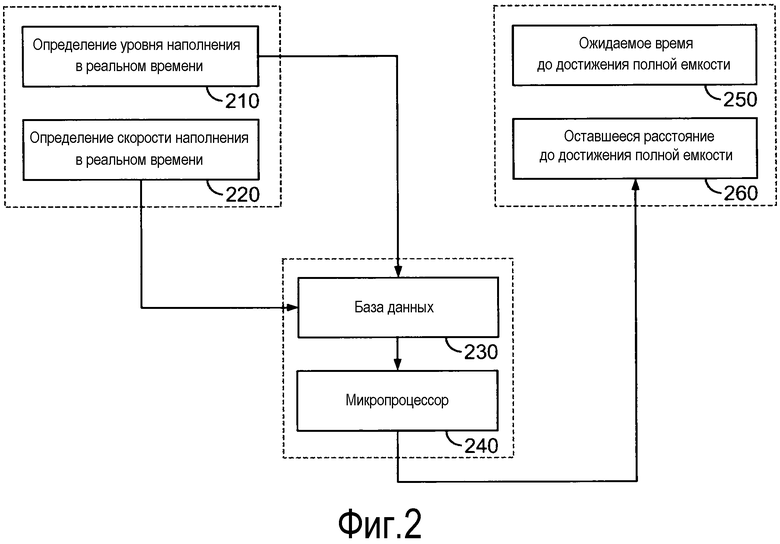
Фиг.2 представляет собой блок-схему, иллюстрирующую вариант осуществления способа выполнения настоящего изобретения.
Там, где это возможно, одни и те же ссылочные позиции используются на чертежах для обозначения одних и тех же или похожих элементов.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к системе и способу для отслеживания в реальном времени информации об уровне зернового бункера и работами уборочной машины. Работы уборочной машины могут включать в себя машинную логистику и решения по уборке урожая.
Фиг.1 показывает вариант осуществления уборочной машины 10, выполненной с возможностью уборки урожая сельскохозяйственной культуры согласно настоящему изобретению. Уборочная машина 10 включает в себя рабочее орудие 12, кабину 13 и зерновой бункер (бункер) 14 для временного хранения собранного урожая 15. Во время работы, когда уборочная машина 10 пересекает поле, урожай собирается рабочим орудием 12 и накапливается в бункере 14. При заданном количестве урожая собранный урожай 15 переносится из уборочной машины 10 во вторую сельскохозяйственную машину или транспортное средство для разгрузки (не показано). В одном варианте осуществления заданное количество урожая может быть заданным весом собранного зерна или заданным объемом собранного зерна, которые измеряются как процент от максимальной емкости зернового бункера. Например, заданный объем собранного зерна может быть, но не только, равен приблизительно 50 процентам объема (% объема), 75% объема или 100% объема (полная емкость) бункера 14. В одном варианте осуществления заданным местоположением для передачи урожая может быть край конкретной борозды посева при достижении заданного количества собранного урожая.
Транспортное средство для разгрузки может быть, но не только, зерновозкой, бункером или другим контейнером для хранения. Транспортное средство для разгрузки может быть самоходным или тянуться трактором или грузовиком. В этом варианте осуществления собранный урожай 15 передается посредством устройства 17 переноса, расположенного в уборочной машине 10. Устройство 17 переноса может быть шнеком, конвейером или другим аналогичным транспортировочным устройством. В другом варианте осуществления собранный урожай 15 может передаваться посредством устройства переноса материала, таким как, но не только, конвейер, шнек, ковш, лопатка или другое транспортировочное устройство перевозящего транспортного средства, расположенного в соприкосновении с собранным урожаем 15. В еще одном варианте осуществления собранный урожай 15 может быть выгружен из уборочной машины 10 и принят транспортным средством для разгрузки.
Уборочная машина 10 дополнительно включает в себя систему 20 управления. Система 20 управления включает в себя микропроцессор и базу данных (не показана). Микропроцессор принимает и предоставляет данные об отдельной работе по уборке урожая из и в базу данных. Микропроцессор включает в себя компьютерный программный продукт, воплощенный на машиночитаемом носителе. Микропроцессор выполнен с возможностью запуска компьютерного программного продукта для формирования данных о работах по уборке урожая. Данные о работах по уборке урожая могут включать в себя, но не только, значение для разгрузки, при котором собранный урожай 15 переносится из уборочной машины 10 во вторую сельскохозяйственную машину или транспортное средство для разгрузки (не показано). Значение для разгрузки может быть, но не только, интервалом времени для достижения заданного количества собранного урожая и/или расстоянием, которое уборочная машина должна убрать для достижения заданного количества собранного урожая. Например, значение для выгрузки может быть интервалом времени и/или расстоянием уборки для уборочной машины 10, чтобы получать около 100% емкости. Вместо расстояния также может быть использована оставшаяся площадь, которая должна быть убрана для заполнения бункера. Данные о работах по уборке урожая вводятся в базу данных и доступны и/или отображаются оператору.
В базу данных представлены данные об уборке урожая для конкретной работы по уборке урожая. Данные об уборке урожая включают в себя, но не только, максимальную емкость зернового бункера, уровень наполнения в реальном времени и текущие или сохраненные данные об уровне зерна конкретной работы по уборке урожая. В одном варианте осуществления данные об уборке урожая могут включать в себя, но не только, заданную максимальную емкость зернового бункера одной или более уборочных машин, участвующих в работе по уборке урожая, данные о карте области уборки урожая и данные о вместимости урожая одного или более транспортных средств для разгрузки. Уровень наполнения в реальном времени предоставляется системой отслеживания зернового бункера.
База данных может быть воплощена в запоминающем устройстве, таком как, но не только, накопитель на жестком диске. База данных может быть предоставлена запоминающему устройству из устройства хранения, такого как, но не только, диск компьютера. В другом варианте осуществления база данных может быть вручную введена в микропроцессор.
Система 20 управления дополнительно включает в себя систему 22 отображения для отображения операционных данных оператору (не показан). Система 22 отображения может включать в себя устройство ввода данных, такое как сенсорный экран. В другом варианте осуществления система 20 управления может включать в себя клавиатуру и/или другое устройство ввода данных. Система 22 отображения может быть одним блоком отображения или может включать в себя множество блоков отображения. В этом примерном варианте осуществления система 20 управления расположена в кабине 13 уборочной машины 10. В другом варианте осуществления система 20 управления может быть расположена в и/или на кабине 13 и/или уборочной машине 10 в или на другой уборочной машине, сельскохозяйственной машине или транспортном средстве или в местоположении уборки урожая или в удаленном местоположении.
Система 20 управления дополнительно включает в себя систему отслеживания зерновой грузовместимости (не показана). В одном варианте осуществления система отслеживания зерновой грузовместимости включает в себя систему отслеживания емкости зернового бункера, которая определяет количество зерна в бункере 14. Система отслеживания емкости зернового бункера предоставляет данные о количестве собранного урожая или, другими словами, количестве зерна в бункере 14 системе 20 управления. В одном варианте осуществления количество зерна может быть определено посредством определения % объема, % веса, уровня зерна или другой относительной величины емкости зернового бункера. В одном варианте осуществления данные о зерновой грузовместимости обеспечиваются в реальном времени. Данные о зерновой грузовместимости могут предоставляться непрерывно или квазинепрерывно в базу данных.
В одном варианте осуществления система отслеживания емкости зернового бункера может включать в себя, но не только, структуру датчика уровня зерна, которая может содержать любой один или комбинацию контактных и/или бесконтактных датчиков. Например, система отслеживания емкости зернового бункера может включать в себя любой один или комбинацию ультразвуковых датчиков, «интеллектуальных» изображений, встроенных весов и множество контактных датчиков, размещенных от низа до верха бункера 14. «Интеллектуальные» изображения - это видео- или фотоизображения, обработанные посредством компьютера или другого вычислительного устройства, чтобы определять количество зерна в бункере 14. В одном варианте осуществления «интеллектуальные» изображения обрабатываются системой 20 управления. Датчики обеспечивают непрерывные или квазинепрерывные данные об уровне зерна в бункере 14.
Система отслеживания зерновой грузовместимости может дополнительно включать в себя систему потока урожая зерновых, которая предоставляет данные в реальном времени о количестве зерна, собранного и предоставленного в бункер 14, или, другими словами, скорости наполнения бункера 14 в реальном времени. Система потока урожая зерновых может включать в себя один или более датчиков потока зерна в системе транспортирования зерна.
Датчики потока зерна могут быть датчиками массового потока и/или другими аналогичными устройствами для измерения массового и/или объемного потока.
В другом варианте осуществления система отслеживания зерновой грузовместимости определяет количество зерна в бункере 14 из системы потока урожая зерновых. В одном варианте осуществления система отслеживания зерновой грузовместимости непрерывно определяет и/или вычисляет количество собранного урожая с помощью одного или более датчиков потока зерна, отслеживающих поток зерна в бункер 14. Датчики потока зерна могут быть датчиками массового или объемного расхода. В еще одном варианте осуществления система отслеживания зерновой грузовместимости определяет количество зерна в бункере 14 с помощью одного или более контактных датчиков в бункере 14, объединенных с одним или более датчиками потока зерна в системе транспортирования зерна.
В другом варианте осуществления контактный датчик расположен в бункере 14, где почти при всех условиях уровень зерна в бункере 14 находится ниже этого датчика, когда зерновой бункер 14 разгружен или находится в другом пустом или исходном состоянии. Эта позиция может называться нижней позицией в бункере 14. Когда уборочная машина 10 убирает урожай, и система 20 управления принимает предупреждающий сигнал от этого первого датчика, система 20 управления предупреждается о том, что зерно достигло первого заданного количества зерна в зерновом бункере 14. Это предупреждение может называться первой точкой срабатывания. В другом варианте осуществления множество контактных датчиков могут быть расположены в различных позициях в зерновом бункере 14, чтобы учитывать изменения в первоначальном уровне зерна в зерновом бункере 14, которые могут получаться в результате частичной разгрузки зернового бункера во время уборки урожая, и/или обеспечивать корреляцию с информацией от датчика массового расхода. Система 20 управления с помощью данных от датчика массового расхода в комбинации с одной или более точками срабатывания непрерывно определяет уровень зерна или количество и отображает эти данные оператору.
В предпочтительном варианте осуществления система отслеживания зерновой грузовместимости содержит датчик верхнего уровня, который расположен для считывания уровня зерна, соответствующего заданному количеству собранного урожая, после чего урожай нужно перенести в транспортное средство для разгрузки. Это обычно 100% емкости бункера 14. Сигнал от датчика верхнего уровня может быть использован для повторной калибровки сигнала от датчика массового или объемного расхода, т.е. для настройки коэффициента, который связывает сигнал от датчика расхода с объемом зерна, сброшенного в бункер 14. Когда используются датчики массового расхода, такая повторная калибровка требуется, когда плотность (кг/л) зерна изменяется существенно вследствие изменения характеристик зерна, таких как средний размер зерна и влажность. Повторная калибровка также исправляет влияния от загрязнения или медленного изменения свойств компонентов в датчиках массового или объемного расхода. Она также компенсирует влияния склона местности, когда больше зерна сдвигается в одну или другую сторону бункера.
Система отслеживания срабатывает, когда бункер пуст, например, после полной разгрузки. Система может получать такую полную разгрузку из сигнала датчика нижнего уровня в бункере, достаточно продолжительной работы системы разгрузки или из указания, выданного оператором. Микропроцессор начинает интегрировать поток, измеряемый датчиком потока, до тех пор, пока зерно не достигнет датчика верхнего уровня. Затем интегрированная величина сохраняется в памяти. Объем при верхнем уровне является известным фиксированным значением. Система окончательно сравнивает интегрированную величину потока с объемом и получает из этого коэффициент калибровки, который должен быть использован во время следующего наполнения.
Согласно альтернативному варианту осуществления система может дополнительно содержать датчик нижнего уровня и интегрировать поток зерна, предоставляемый между срабатыванием датчика нижнего уровня и срабатыванием датчика верхнего уровня. Интегрированная величина затем сравнивается с известным объемом между верхним и нижним уровнями, и результирующее соотношение используется в качестве нового коэффициента калибровки. Такой датчик нижнего уровня может быть расположен, чтобы фиксировать пустой бункер или, альтернативно, заданный уровень, соответствующий известному объему или проценту наполнения.
Вместо простой замены коэффициента калибровки после каждого наполнения бункера может быть полезным модулировать коэффициент калибровки для самых последних данных, например, заменяя самое последнее значение значением, вычисленным из 2/3 предшествующего значения + 1/3 значения, полученного из самого последнего измерения. Когда последовательности измерений полных зерновых бункеров загружены в базу данных, коэффициент калибровки может быть вычислен с помощью рекурсивного алгоритма наименьших квадратов. Такая мера уменьшает влияния локальных случайных условий на коэффициент калибровки.
Система отслеживания зерновой грузовместимости оценивает уровень наполнения бункера из интегрированного измеренного потока посредством умножения на коэффициент калибровки. Скорость наполнения бункера может быть вычислена как измеренный поток, умноженный на тот же коэффициент. Когда используется датчик нижнего уровня, система интегрирует поток от момента, когда достигнут нижний уровень, умножает его на коэффициент калибровки и добавляет к нему известный объем для нижнего уровня.
Уровень наполнения может быть установлен с помощью сигнала от датчика потока, начиная от пустого бункера или от уровня с известным объемом или процентом наполнения. Однако не каждая операция разгрузки обязательно снижает уровень зерна до такой известной контрольной точки. Например, разгрузка может быть прервана, когда зерно в прицепе достигает своей максимальной высоты, после чего уборка урожая возобновляется, пока погоняется следующий прицеп. Когда оставшееся зерно находится на уровне между датчиком верхнего и нижнего уровня, система нуждается в дополнительной информации, чтобы определять текущую высоту в бункере.
Система разгрузки обычно содержит средство выгрузки, такое как шнек, предусмотренный в самой нижней точке зернового бункера 14. Средство выгрузки обычно работает с заданной фиксированной скоростью, и зерно забирается, таким образом, из бункера, по существу, с установившейся скоростью. Эта скорость, выраженная как объем или % объема в единицу времени, может также изменяться как функция от типа урожая, характеристик зерна или наклона уборочной машины. Однако она может быть определена из измерения каждого интервала времени, необходимого, чтобы привести бункер из наполненного в пустое состояние. Наполненное состояние может быть установлено из сигнала датчика верхнего уровня. Пустое состояние может быть получено из сигнала датчика нижнего уровня или из мощности, крутящего момента или силы, необходимой, чтобы задействовать средство выгрузки. Когда выгружающий шнек приводится в действие гидромотором, обеспечиваемый крутящий момент может быть получен из давления в гидропроводе к мотору. Когда бункер пуст, шнек работает вхолостую, и нет высокого давления в приводном моторе.
После того, как скорость выгрузки известна, система отслеживания зерновой грузовместимости может использовать это значение, чтобы вычислять количество зерна, которое было выгружено во время данного временного интервала разгрузки, и вычитать это количество из полного содержимого бункера, чтобы предоставлять значение настоящего уровня зерна. Когда уборка урожая возобновляется после частичной выгрузки, это значение уровня используется в качестве новой начальной точки для увеличения уровня в соответствии с сигналом от датчика потока зерна, как описано выше.
В дополнительном улучшении датчик нижнего уровня может быть использован, чтобы уточнять измерение скорости выгружаемого потока. Действительно, когда средство выгрузки содержит шнек на дне бункера, постоянное вращение шнека будет давать в результате, по существу, постоянный выходящий поток зерна, по меньшей мере, пока полная длина шнека покрыта зерном. Однако когда бункер почти пуст, зерно сначала очищает конец шнека, который противоположен отверстию для выгрузки. Зерно тогда постепенно уходит из шнека в направлении этого отверстия для выгрузки. При этих обстоятельствах существует постепенное снижение выгружаемого потока до тех пор, пока бункер не опустеет полностью.
Выгодно не принимать во внимание последнее количество зерна при расчете выгрузки. Для этого датчик нижнего уровня может быть расположен слегка выше секции средства выгрузки, которая очищается первой, когда бункер почти пуст. Зерно будет достигать этого нижнего уровня, прежде чем часть шнека будет работать вхолостую и, следовательно, прежде чем скорость разгрузки начнет снижаться. Соответственно, постоянная скорость выгрузки, которая должна использоваться для последующего определения уровня зерна в бункере, может быть получена из временного интервала, необходимого, чтобы доставлять зерно с высоты датчика верхнего уровня к высоте датчика нижнего уровня, значительно выше средства выгрузки.
Фиг.2 иллюстрирует примерный вариант осуществления способа выполнения настоящего изобретения. Как может быть видно на фиг.2, способ включает в себя определение в реальном времени количества собранного урожая или уровня наполнения зерна в бункере 210 и обеспечение этих данных в базу 230 данных. Способ дополнительно включает в себя определение в реальном времени скорости наполнения зернового бункера 220 и обеспечение этих данных в базу 230 данных. Микропроцессор 240 осуществляет доступ к базе данных и выполняет встроенную компьютерную программу, чтобы определять данные о работах по уборке урожая. Данные о работах по уборке урожая могут включать в себя, но не только, значение для разгрузки, при котором собранный урожай переносится из уборочной машины во вторую сельскохозяйственную машину или транспортное средство для разгрузки. Значение для разгрузки может быть, но не только, интервалом времени для достижения заданного количества собранного урожая и/или расстоянием, которое уборочная машина должна убрать для достижения заданного количества собранного урожая. В одном варианте осуществления значение для разгрузки является ожидаемым временем для достижения полной емкости 250 и/или оставшимся расстоянием для достижения полной емкости 260. В одном варианте осуществления полная емкость равна приблизительно 100% объема емкости. Данные о работах по уборке урожая вводятся в базу данных и доступны и/или отображаются оператору.
В другом варианте осуществления уборочная машина 10 может быть оборудована бортовой системой глобального позиционирования (GPS). GPS предоставляет в реальном времени данные о положении уборочной машины системе 20 управления. В варианте осуществления данные о положении уборочной машины в реальном времени могут предоставляться в базу данных. База данных может обновляться непрерывно или квазинепрерывно данными о положении уборочной машины в реальном времени. Система 20 управления может также быть выполнена с возможностью приема картографических данных от GPS. Картографические данные могут включать в себя, но не только, рабочую карту (карту) интересуемой площади уборки урожая. В одном варианте осуществления система 20 управления принимает картографические данные и данные о положении уборочной машины от GPS.
Когда система управления включает в себя GPS-данные, микропроцессор может быть выполнен с возможностью определения значения для разгрузки, которое включает в себя одно или более местоположений или позицией на карте, где вычислено, что уборочная машина должна достигать одного или более заданных объемов зернового бункера. Эти местоположения могут называться оцениваемыми местоположениями для разгрузки. В одном варианте осуществления микропроцессор может быть выполнен с возможностью определения позиции на поле, с которой должен быть собран урожай, близкой к краю поля, с которого должен быть собран урожай, или борозду собираемого урожая, которая достигается во время уборочных работ, прежде чем уборочная машина достигнет наполненного зернового бункера. Оцениваемые местоположения для разгрузки могут отображаться на дисплее 22, на GPS-дисплее или посредством комбинации обоих дисплеев оператору уборочной машины. Заданные объемы зернового бункера могут включать в себя почти полный объем зернового бункера (почти 100% объема) или некоторую другую величину уровня наполнения. Система 20 управления может отображать местоположение и данные оператору на дисплее 22, на GPS-дисплее или посредством комбинации обоих дисплеев.
Таким образом, оператор принимает данные работы по уборке урожая, включающие в себя оцениваемые местоположения для разгрузки, чтобы помогать оператору принимать решения относительно работы по уборке урожая. В другом варианте осуществления данные о работе по уборке урожая могут быть переданы другим транспортным средствам и/или в центральное или удаленное место управления, чтобы предоставлять данные о работе по уборке урожая одному или более операторам, в дополнение или вместо отображения данных оператору уборочной машины. Другие транспортные средства могут включать в себя одно или более транспортных средств для разгрузки. Данные о работе по уборке урожая могут быть переданы беспроводным образом посредством Bluetooth™ или другого устройства беспроводной передачи. В одном варианте осуществления данные о работе по уборке урожая используются оператором, чтобы планировать работы по уборке урожая, включающие в себя, но не только, функционирование транспортного средства для разгрузки и/или транспортирующего грузовика. В одном варианте осуществления система управления выполнена с возможностью вычисления и выдаче рекомендаций по работе по уборке урожая оператору.
В еще одном варианте осуществления система управления выполнена с возможностью приема данных о работе по уборке урожая от одной или более уборочных машин и/или одного или более транспортных средств для разгрузки. В этом варианте осуществления одна или более уборочных машин и одно или более транспортных средств для разгрузки могут быть оборудованы индивидуальными системами управления, чтобы сообщать индивидуальные данные об уборке урожая уборочной машиной и/или транспортным средством для разгрузки системе управления. В одном варианте осуществления система 20 управления может определять и вычерчивать оптимальный маршрут передвижения для одного или более транспортных средств для разгрузки или других захватывающих транспортных средств для пересечения с и/или обслуживать, включая разгрузку, одну или более уборочных машин на том же поле. Данные об уборке урожая могут включать в себя, но не только, оставшуюся емкость зернового бункера уборочной машины и/или зерновозки, скорость наполнения зернового бункера в реальном времени, позицию уборочной машины и/или транспортного средства для разгрузки и/или другие данные об уборке урожая для одной или более уборочных машин, транспортных средств для разгрузки или операторов работ по уборке урожая.
Система управления анализирует данные об уборке урожая в реальном времени. В одном варианте осуществления система управления анализирует данные об уборке урожая, чтобы определять оптимальную работу по уборке урожая. Оптимальная работа по уборке урожая может включать в себя модель разгрузки убираемого урожая. Модель разгрузки убираемого урожая может включать в себя, но не только, то, какая уборочная машина должна быть разгружена первой, и/или как долго разгружать каждую уборочную машину перед перемещением к другой уборочной машине. Модель разгрузки убираемого урожая может максимизировать емкость транспортного средства для разгрузки, тем самым, оптимизируя местоположения для разгрузки для любого числа уборочных машин, работающих на конкретном поле. В одном варианте осуществления система управления непрерывно обновляет базу данных, когда она наблюдает за положением транспортного средства для разгрузки с последней точки разгрузки, оставшейся емкостью для сбора урожая одной или более уборочных машин и емкостью зерновозки. Система управления выполняет оптимизирующие определения, чтобы руководить размещением и/или направлением передвижения одного или более транспортных средств для разгрузки. В одном варианте осуществления границы поля и карты собранного урожая могут быть предоставлены в базу данных системы управления, чтобы дополнительно вычислять данные о работе по уборке урожая, включающие в себя кратчайшее расстояние и/или маршрут вокруг оставшегося урожая (урожая, который должен быть убран), до оцениваемого местоположения для разгрузки.
В еще одном варианте осуществления одна или более уборочных машин и/или одно или более транспортных средств для разгрузки оборудованы системой GPS-наведения, которое обеспечивает планирование маршрута. Система GPS-наведения предоставляет данные о планировании маршрута системе управления. В одном варианте осуществления система GPS-наведения обеспечивает планирование маршрута для системы управления, чтобы направлять транспортное средство для разгрузки по заданному оптимизированному перехватывающему маршруту к уборочной машине, которая должна быть разгружена.
В то время как изобретение было описано со ссылкой на предпочтительный вариант осуществления, специалистам в данной области техники будет понятно, что могут быть внесены различные изменения и могут быть использованы эквиваленты вместо его элементов без отступления от рамок изобретения. Кроме того, множество модификаций может быть выполнено, чтобы приспособить конкретную ситуацию или материал к идее изобретения без отступления от его основной области применения. Поэтому планируется, что изобретение не будет ограничено конкретным вариантом осуществления, раскрытым как оптимальный режим, предполагаемый для выполнения настоящего изобретения, а изобретение будет включать в себя все варианты осуществления, подпадающие под объем приложенной формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КАРТИРОВАНИЯ УРОЖАЙНОСТИ | 2024 |
|
RU2819208C1 |
| МОНИТОРИНГ КАЧЕСТВА ЗЕРНА | 2015 |
|
RU2720867C2 |
| СИСТЕМА ВЫЯВЛЕНИЯ РАБОЧЕГО СОСТОЯНИЯ ДЛЯ РАБОЧЕЙ МАШИНЫ С ОБЪЕДИНЕНИЕМ, УЧИТЫВАЮЩИМ ДОСТОВЕРНОСТЬ ЗНАЧЕНИЙ ДАТЧИКОВ | 2014 |
|
RU2658981C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ДЛЯ ХРАНЕНИЯ В ПОЛЕ, ВОЗМОЖНОСТИ ОПЕРАТИВНОГО КОНТРОЛЯ И ВЫГРУЗКИ УБРАННЫХ ПРОДУКТОВ УРОЖАЯ ИЗ УБОРОЧНОЙ МАШИНЫ | 2007 |
|
RU2440712C2 |
| УБОРОЧНАЯ МАШИНА С ИНТЕЛЛЕКТУАЛЬНОЙ СИСТЕМОЙ УПРАВЛЕНИЯ ДЛЯ ВЫЯВЛЕНИЯ УСТОЙЧИВОГО СОСТОЯНИЯ ПЕРЕРАБОТКИ УРОЖАЯ | 2014 |
|
RU2649016C2 |
| СПОСОБ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ПРОЦЕССОМ УБОРОЧНОЙ МАШИНЫ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2447640C1 |
| СИСТЕМА И СПОСОБ АВТОМАТИЧЕСКОГО ДОКУМЕНТИРОВАНИЯ СИТУАЦИЙ ПРИ ПОЛЕВЫХ РАБОТАХ | 2012 |
|
RU2605775C2 |
| Способ уборки зернового сорго | 2022 |
|
RU2798242C1 |
| СПОСОБ УБОРКИ ЗЕРНОВЫХ КУЛЬТУР, ОЧИСТКИ НЕВЕЯНОГО ВОРОХА И СРЕДСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2378820C1 |
| СПОСОБ И АГРЕГАТ ДЛЯ УБОРКИ УРОЖАЯ | 2000 |
|
RU2249939C2 |
Группа изобретений относится к сельскому хозяйству. Для координирования работ по уборке урожая определяют в реальном времени уровни наполнения одного или более зерновых бункеров одной или более уборочных машин. Используют датчик потока для определения в реальном времени скоростей наполнения одного или более зерновых бункеров одной или более соответствующих уборочных машин. Обновляют базу данных уровнями наполнения и скоростями наполнения в реальном времени и определяют значение для разгрузки для одной или более уборочных машин для достижения заданной емкости зернового бункера уборочной машины. На этапе определения скоростей наполнения одного или более зерновых бункеров умножают измеренную скорость потока на коэффициент калибровки для получения скорости наполнения в реальном времени, при этом модулируют коэффициент калибровки по достижении уровнем наполнения заданного верхнего уровня. Использование группы изобретений обеспечивает оптимизацию работы по уборке урожая. 3 н. и 12 з.п. ф-лы, 2 ил.
1. Способ отслеживания и координирования работ по уборке урожая, включающий этапы, на которых:
определяют в реальном времени уровни наполнения одного или более зерновых бункеров (14) одной или более соответствующих уборочных машин (10);
используют датчик потока для определения в реальном времени скоростей наполнения одного или более зерновых бункеров (14) одной или более соответствующих уборочных машин (10);
обновляют базу (230) данных уровнями наполнения в реальном времени и скоростями наполнения в реальном времени; и
определяют значение для разгрузки для одной или более уборочных машин (10) для достижения заданной емкости зернового бункера уборочной машины,
отличающийся тем, что этап определения скоростей наполнения в реальном времени включает умножение измеренной скорости потока на коэффициент калибровки для получения скорости наполнения в реальном времени, при этом модулируют коэффициент калибровки по достижении уровнем наполнения заданного верхнего уровня.
2. Способ по п.1, отличающийся тем, что значение для разгрузки содержит промежуток времени для одной или более уборочных машин (10) для достижения заданной емкости зернового бункера уборочной машины.
3. Способ по п.1, отличающийся тем, что значение для разгрузки представляет собой расстояние для одной или более уборочных машин (10) для уборки урожая для достижения заданной емкости зернового бункера уборочной машины.
4. Способ по п.1, отличающийся тем, что дополнительно включает этапы, на которых:
обновляют базу (230) данных рабочей картой; и
обеспечивают позиционные данные в реальном времени для одной или более уборочных машин (10) в базу (230) данных;
при этом значение для разгрузки содержит позицию места разгрузки, где одна или более уборочных машин (10) достигают заданной емкости зернового бункера уборочной машины.
5. Способ по любому из пп.1-4, отличающийся тем, что дополнительно включает этап, на котором обеспечивают позиционные данные в реальном времени для одного или более транспортных средств для разгрузки.
6. Способ по п.5, отличающийся тем, что дополнительно включает этап, на котором составляют оптимальный маршрут передвижения для одного или более транспортных средств для разгрузки для пересечения с одной или более уборочными машинами (10) для операции разгрузки.
7. Способ по п.1, отличающийся тем, что датчик потока содержит устройство измерения массового расхода и/или устройство измерения объемного расхода.
8. Способ по п.7, отличающийся тем, что модулирование коэффициента калибровки включает этапы, на которых:
интегрируют измеренную скорость потока в реальном времени до тех пор, пока уровень наполнения не достигнет заданного верхнего уровня;
определяют соотношение объема зернового бункера на заданном верхнем уровне с интегрированной скоростью потока;
адаптируют коэффициент калибровки к определяемому соотношению.
9. Способ по п.8, отличающийся тем, что адаптация коэффициента калибровки к определенному соотношению включает этап, на котором заменяют коэффициент калибровки значением, определяемым частично посредством предшествующего коэффициента калибровки и частично посредством определяемого соотношения.
10. Способ по п.8 или 9, отличающийся тем, что интегрирование измеренной в реальном времени скорости потока включает этапы, на которых:
интегрируют упомянутую скорость потока с уровня наполнения, достигающего заданный нижний уровень, до уровня наполнения, достигающего заданный верхний уровень; и
объем на заданном верхнем уровне является объемом зернового бункера, находящимся между заданным верхним уровнем и заданным нижним уровнем.
11. Способ по п.1, отличающийся тем, что определение в реальном времени уровней наполнения включает этап, на котором:
определяют уровень наполнения в реальном времени после работы средства выгрузки для выгрузки зерна из зернового бункера (14), и
устанавливают уменьшение в уровне наполнения из скорости выгрузки средства выгрузки и временного интервала, в течение которого средство выгрузки задействовано.
12. Способ по п.11, отличающийся тем, что скорость выгрузки определяется из временного интервала, используемого для приведения уровня наполнения с заданного верхнего уровня до заданного нижнего уровня, при этом наличие зерна на заданном верхнем и/или нижнем уровне устанавливается соответствующими датчиками верхнего и/или нижнего уровня.
13. Способ по п.12, отличающийся тем, что наличие зерна на заданном нижнем уровне устанавливается в местоположении выше средства выгрузки и противоположном отверстию для выгрузки зернового бункера.
14. Система управления для работ по уборке урожая, содержащая:
систему отслеживания зерновой грузовместимости для определения одного или более объемов убираемого урожая в реальном времени одного или более соответствующих зерновых бункеров (14) уборочных машин;
базу (230) данных, выполненную с возможностью приема одного или более объемов убираемого урожая в реальном времени; и
микропроцессор (240);
при этом микропроцессор (240) содержит компьютерный программный продукт, воплощенный на машиночитаемом носителе, и выполнен с возможностью доступа к базе (230) данных, запуска компьютерного программного продукта для формирования данных о работах по уборке урожая и осуществления способа по любому из пп.1-13.
15. Система уборки урожая, содержащая одну или более уборочных машин (10), содержащих зерновые бункеры (14), и одну или более соответствующих систем (20) управления по п.14.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |

