Область техники, к которой относится изобретение
Настоящее изобретение относится к системам идентификации для транспортных средств.
Уровень техники
В 45-75% случаев причиной столкновений на дорогах является ошибка водителя, а в большинстве столкновений она является дополнительным фактором, способствующим большинству столкновений.
Предупреждение о сходе с полосы движения использует визуальный датчик для определения положения транспортного средства (ТС) относительно полосы движения и предупреждения водителя о непреднамеренном сходе с полосы. Некоторые системы предупреждения о столкновении с впереди идущим транспортом используют внешние датчики для обнаружения потенциальных угроз безопасности перед ТС и заблаговременного предупреждения водителя. С другой стороны, данные системы предупреждения водителя работают при регулярных или практически неизменных условиях движения.
Раскрытие изобретения
ТС может быть оснащено системой идентификации, выполненной с возможностью получения информации от устройства идентификации, оценивающего обстановку в окрестности ТС, и анализа поведения водителя ТС на основании данной информации. ТС может быть также оснащено по меньшей мере одним контроллером, объединенным с системой идентификации, и выполненным с возможностью анализа манеры управления ТС водителем и записи данных характеристик, если поведение водителя может быть отнесено к определенному типу.
При иллюстрировании и раскрытии примеров возможного использования данного изобретения настоящее описание не должно быть истолковано как ограничение самого изобретения. Очевидно, что имеется возможность внесения различных модификаций и альтернативных вариантов конструкции без выхода за рамки изобретения.
Краткое описание чертежей
На ФИГ.1 показана блок-схема варианта осуществления системы управления ТС.
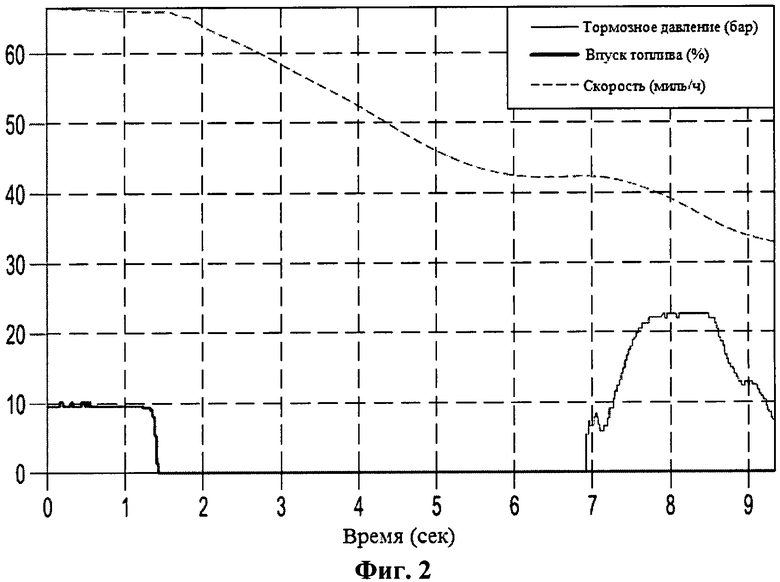
На ФИГ.2 показан примерный график значений скорости движения, силы сцепления и торможения.
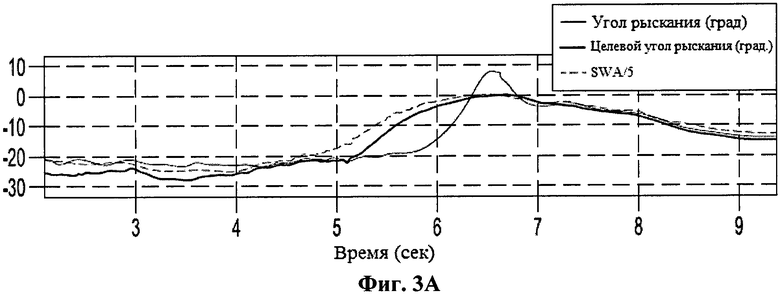
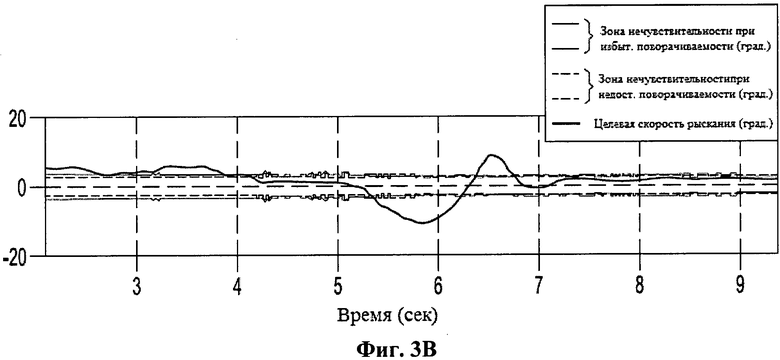
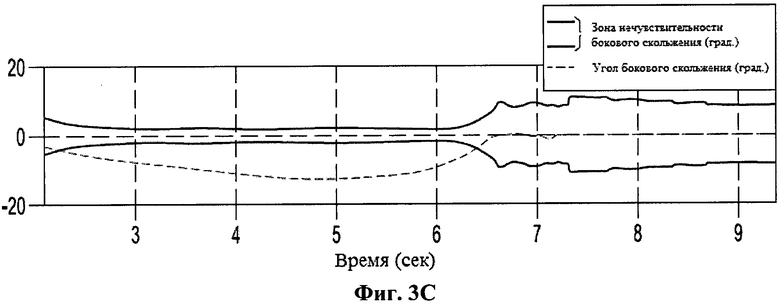
На ФИГ.3А-3С показаны примерные состояния движения ТС при различных скоростях рыскания и углах заноса.
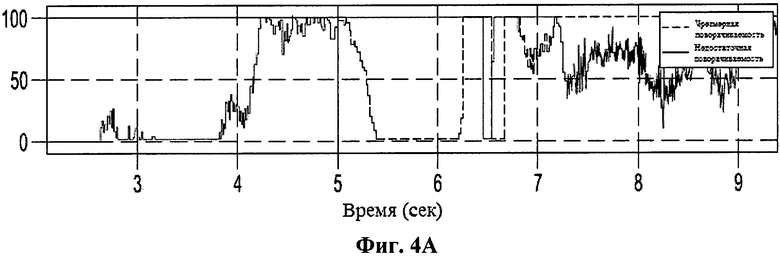
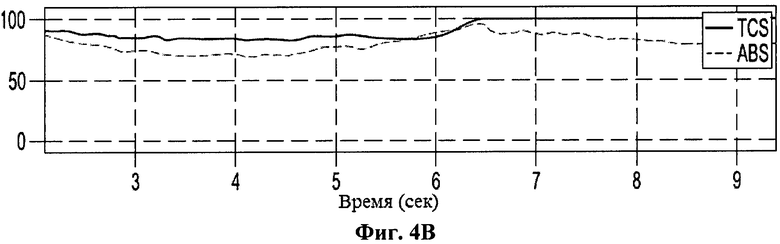
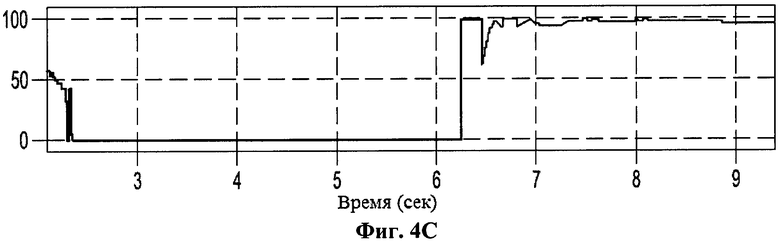
На ФИГ.4А-4С показаны графики границ предела управляемости при заносе, продольном и боковом скольжении.
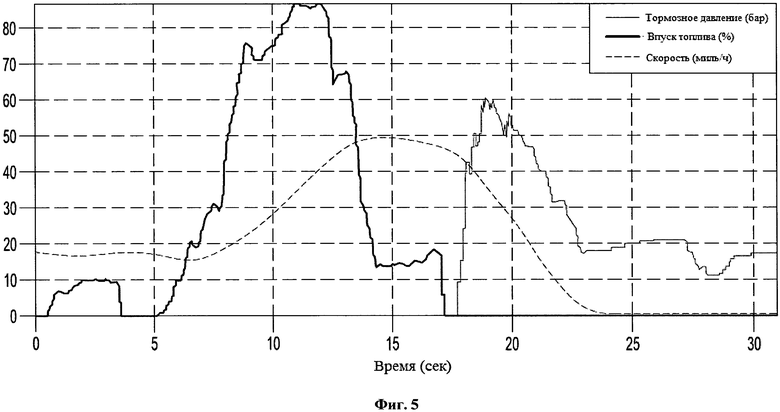
На ФИГ.5 показан график примерной скорости движения ТС, силы сцепления и торможения.
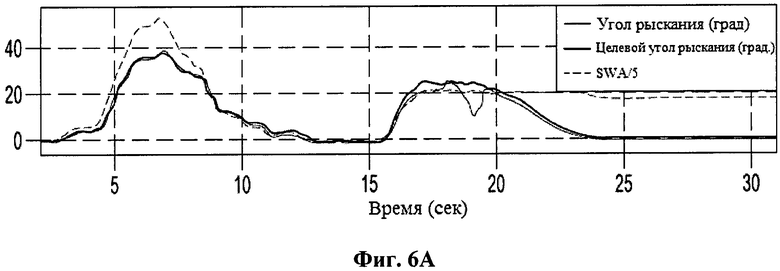
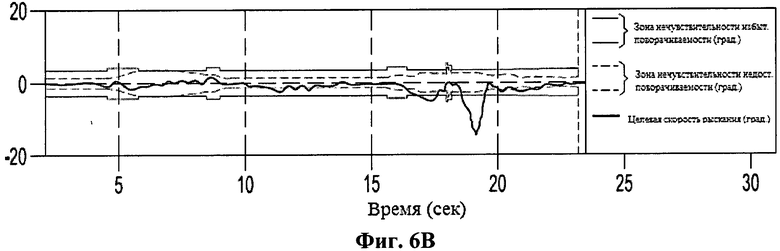
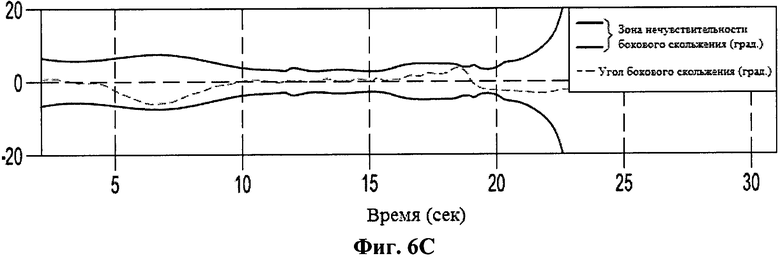
На ФИГ.6А-6С показаны примерные варианты характера движения ТС при различных скоростях рыскания и углах бокового скольжения.
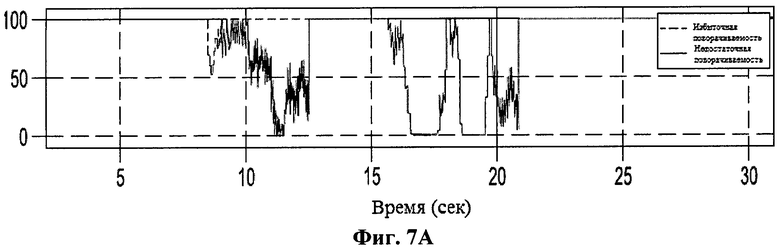
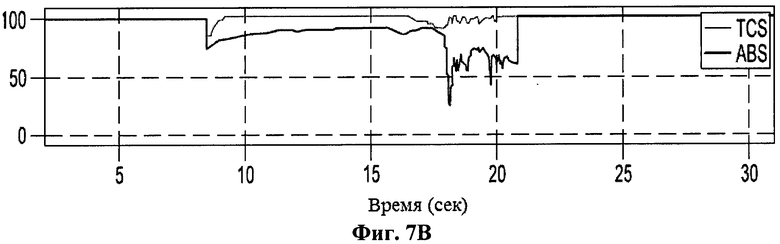
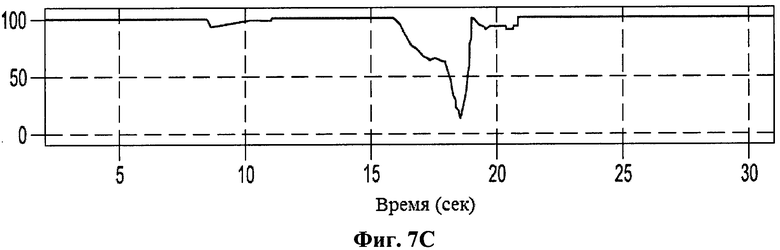
На ФИГ.7А-7С показаны графики границ предела управляемости при заносе, продольном и боковом скольжении.
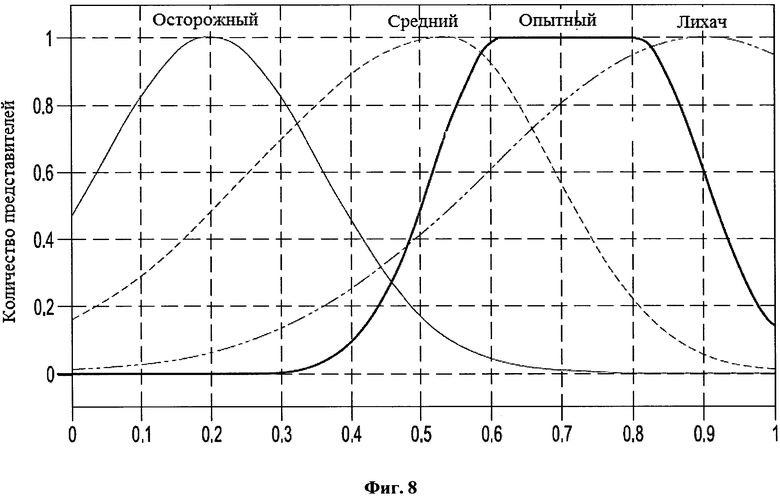
На ФИГ.8 показаны примеры графиков функций, характеризующих четыре категории водителей на основании фактора риска при вождении.
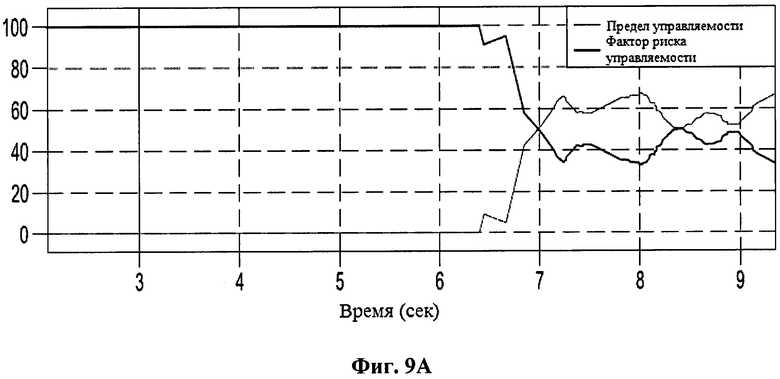
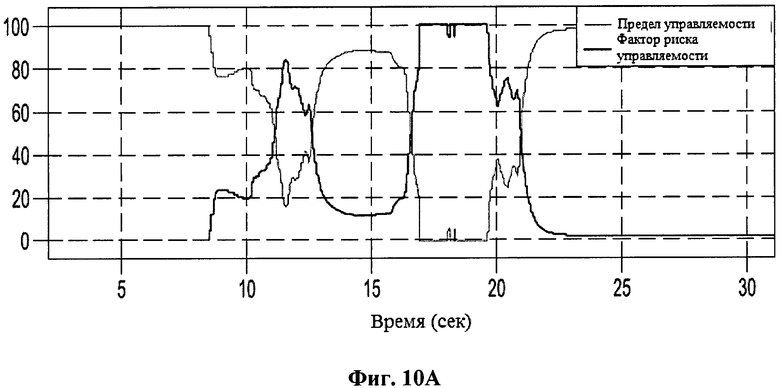
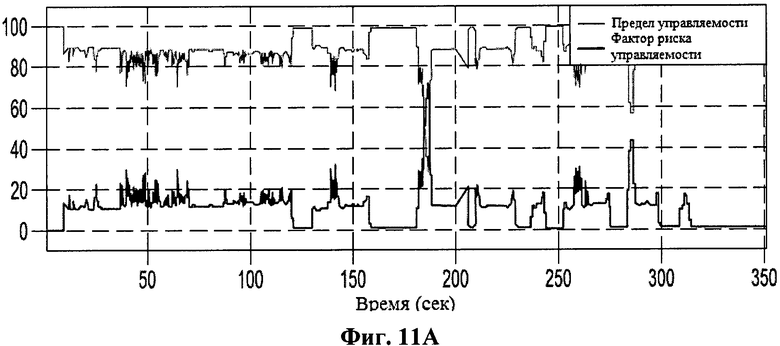
На ФИГ.9А, 10А и 11А показаны графики примеров конечных значений границы предела управляемости и риска.
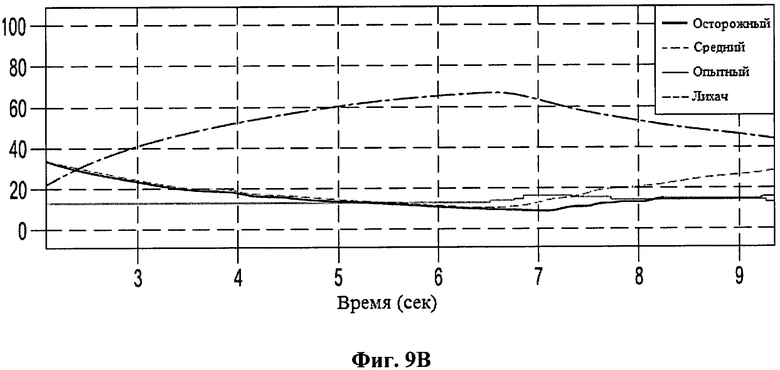
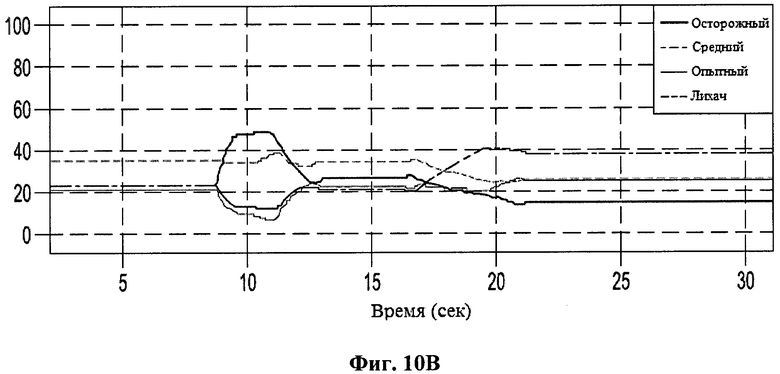
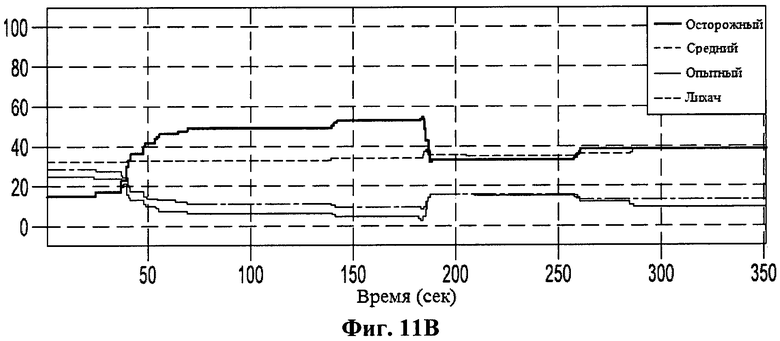
На ФИГ.9В, 10В и 11В показаны графики примеров характеристик стилей вождения.
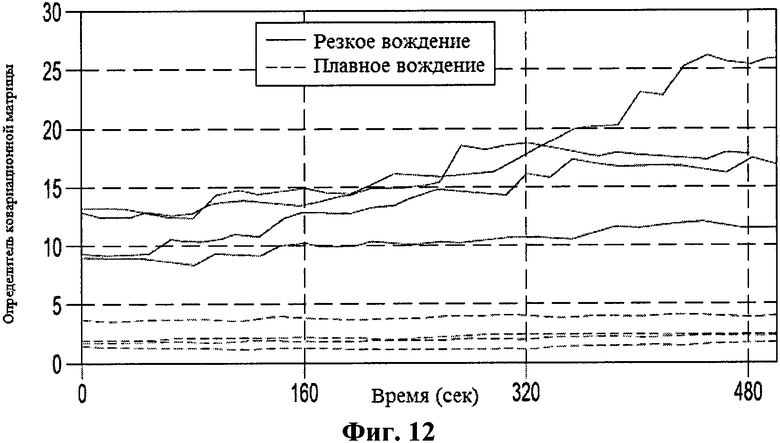
На ФИГ.12 показан график примеров основных показателей плавного и резкого вождения.
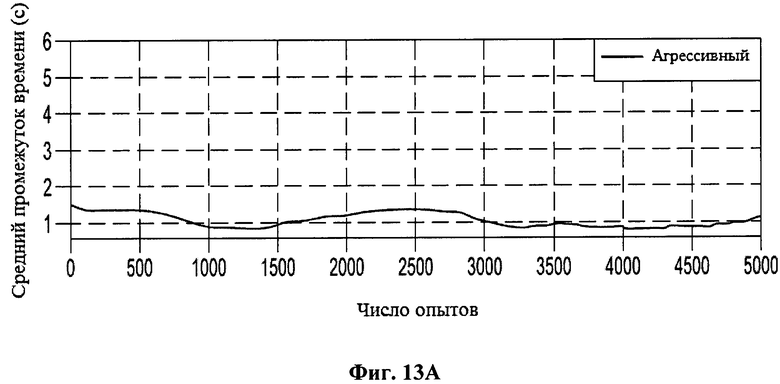
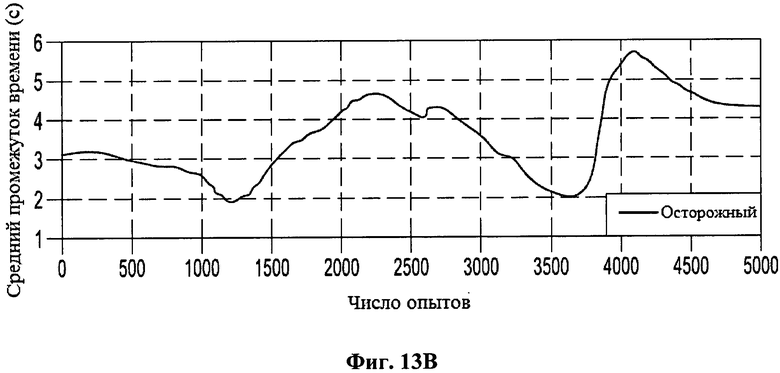
На ФИГ.13А и 13В показаны графики примеров средних промежутков времени при агрессивном и осторожном вождении соответственно.
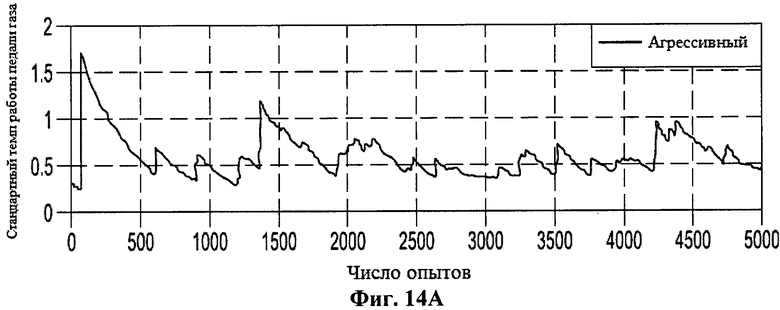
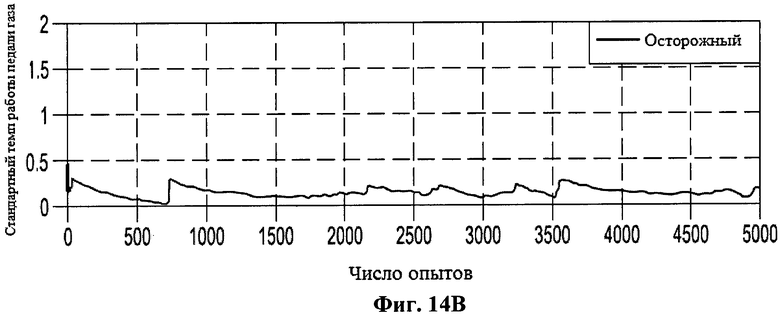
На ФИГ.14А и 14В показаны графики примеров среднеквадратичных отклонений скорости при срабатывании педали газа при агрессивном и осторожном вождении соответственно.
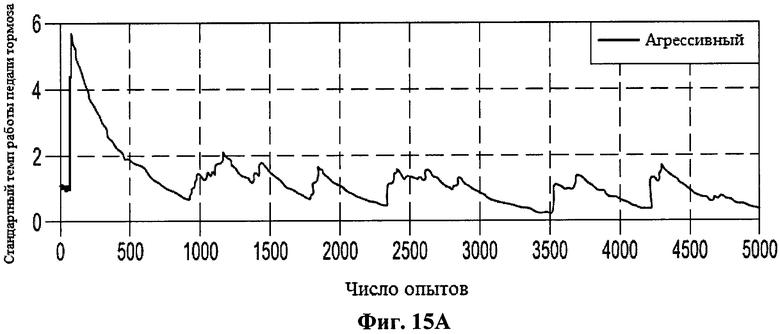
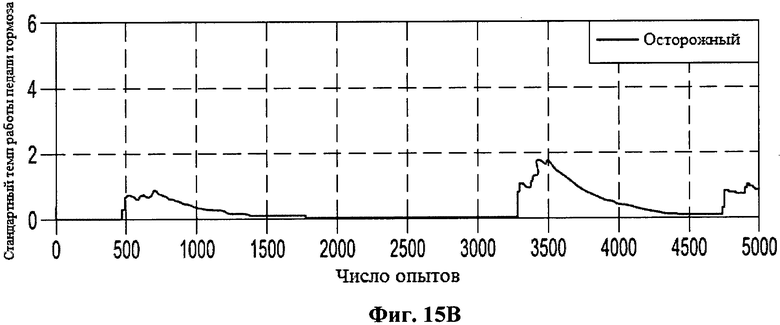
На ФИГ.15А и 15В показаны графики примеров среднеквадратичных отклонений скорости при срабатывании педали тормоза при агрессивном и осторожном вождении соответственно.
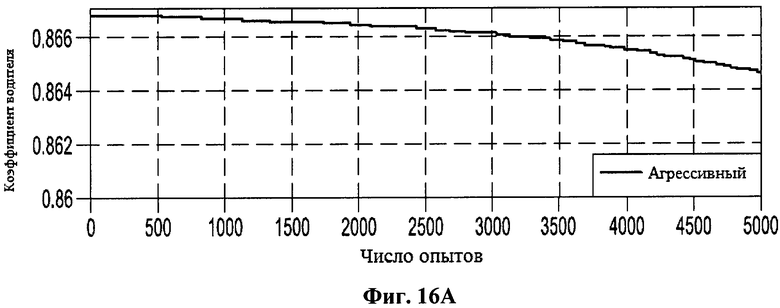
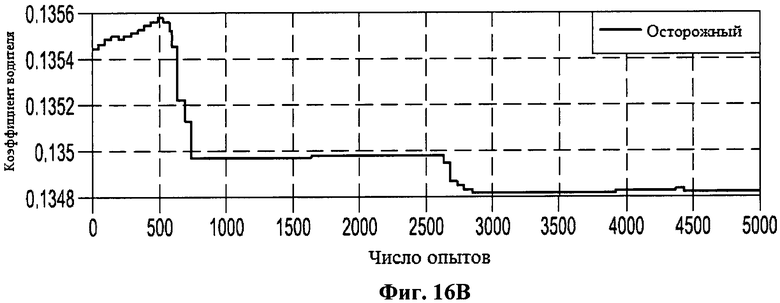
На ФИГ.16А и 16В показаны графики примеров коэффициентов водителей для агрессивного и осторожного стилей вождения соответственно.
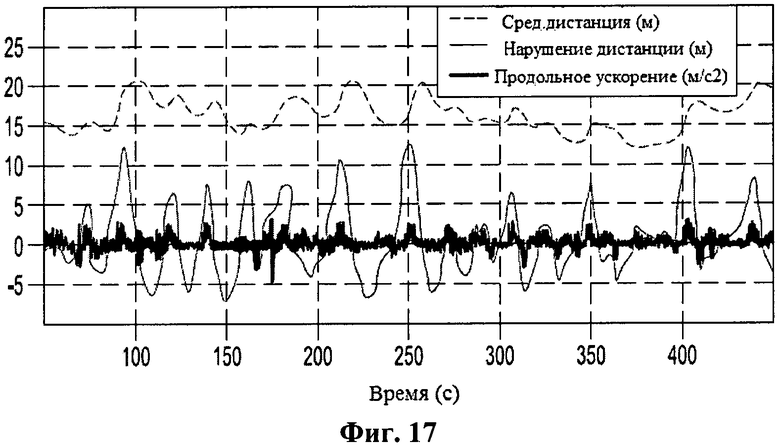
На ФИГ.17 показан график примеров средних промежутков между участниками движения, нарушений промежутков и продольного ускорения между впереди и сзади идущим транспортными средствами при агрессивном вождении.
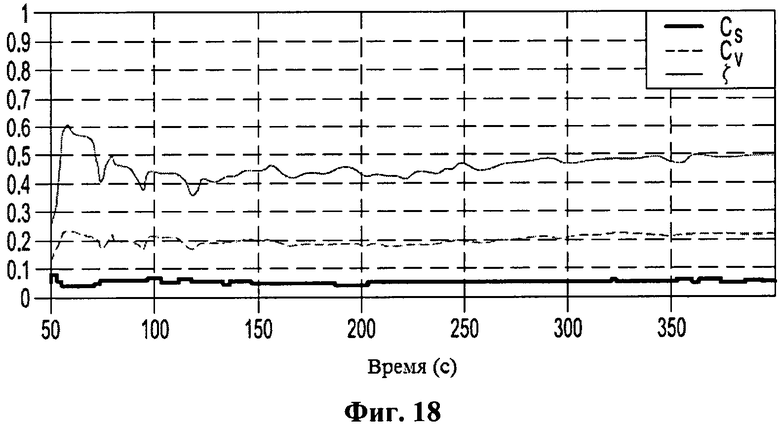
На ФИГ.18 показан график выбранных примеров параметров, характеризующих агрессивное вождение, показанное на Фиг.17.
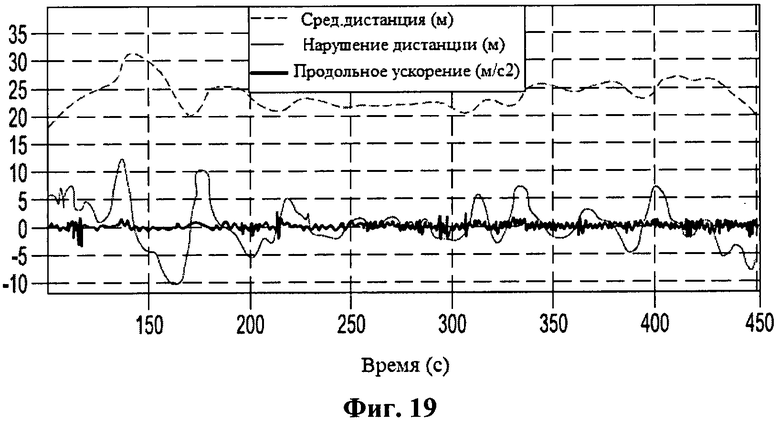
На ФИГ.19 показан график примеров средних промежутков между участниками движения, нарушений промежутков и продольного ускорения между впереди и сзади идущим транспортными средствами при осторожном вождении.
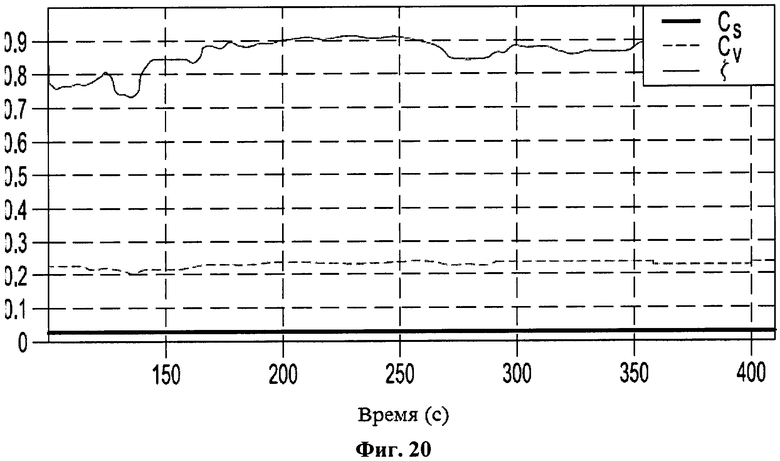
На ФИГ.20 показан график выбранных примеров параметров, характеризующих осторожное вождение, показанное на Фиг.19.
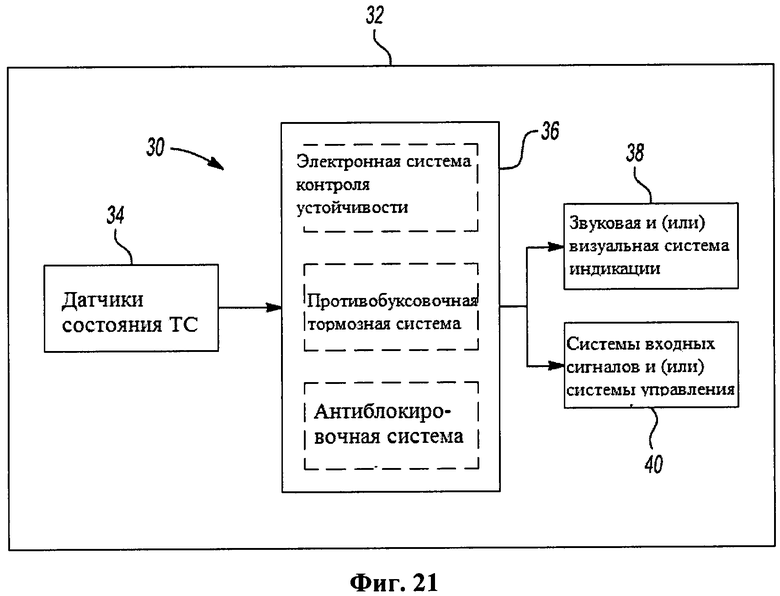
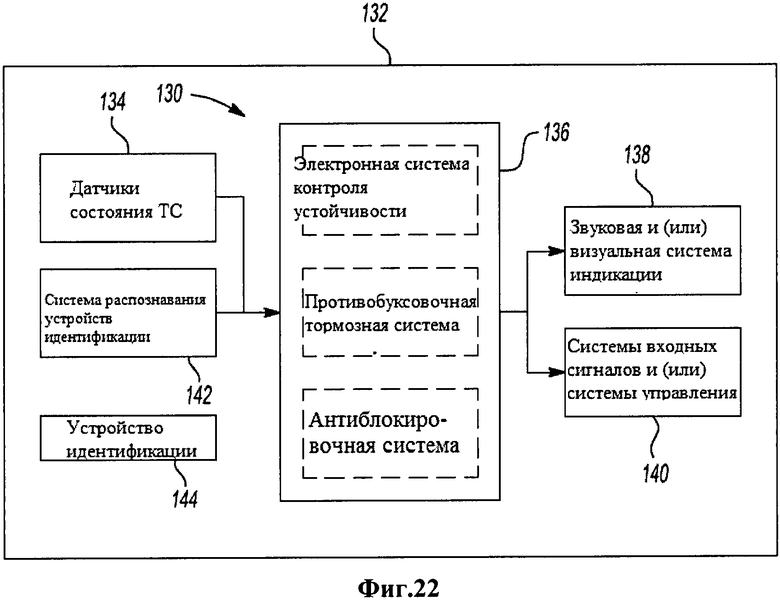
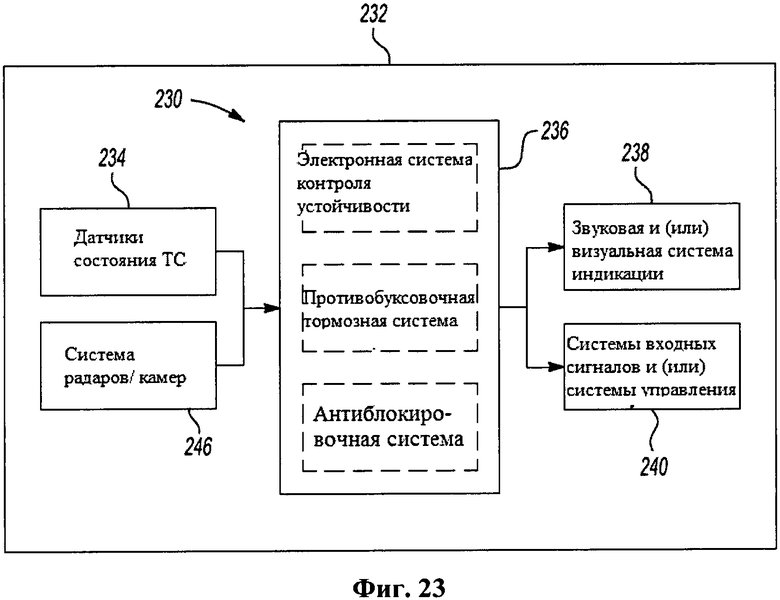
На ФИГ.21-23 показаны блок-схемы вариантов осуществления систем обучения водителя.
Осуществление изобретения
I. Введение
Цель существующих электронных систем управления ТС заключается в упрощении вождения путем определения намерений водителя и оказания ему помощи за счет управления ТС для того, чтобы безопасно, точно и плавно выполнить необходимый маневр водителя. Эффективность управления электронных систем управления может быть значительно повышена, если водитель и электронная система управления осуществляют совместную работу по избежанию аварии и максимизируют способность предотвращения аварии системы транспортного средства с участием водителя. Один из методов для достижения этого эффекта заключается в предоставлении своевременных и ясных рекомендаций водителю таким образом, чтобы ответственный водитель мог действовать должным образом. Подобные рекомендации могут быть получены или вычислены на основании сигналов с обычно установленных на ТС датчиков, которые осуществляют двустороннее управление в замкнутом контуре между водителем и электронной системой управления. Электронная система управления учитывает намерения водителя, а водитель реагирует на рекомендации электронной системы управления для изменения параметров управления (например, опускание дроссельной заслонки, уменьшение усилия, прилагаемого к рулевому управлению и т.д.). Таким образом, возможна постоянная координация между водителем и электронной системой управления, которая может минимизировать вероятность возникновения угроз безопасности, связанных с ошибками водителя.
В частности, в настоящем описании, рассматриваются предупреждения, которые возникают при приближении к пределу управляемости, то есть к условиям вождения или маневрирования, при которых обычно в процесс управления включается система контроля устойчивости ТС. В дополнение к проблемам, возникающим при приближении к пределу управляемости, вышеописанный подход использования системы обучения водителя также может применяться для экономии топлива: система может инструктировать и/или обучать водителя стилю вождения, обеспечивающему экономичный расход топлива. В настоящем описании также рассмотрено использование данных, поступающих от системы контроля устойчивости ТС, для предоставления предупреждений в режиме реального времени, когда ТС приближается к пределу управляемости. Это использование может являться одной из группы предупреждающих функций, которые могут быть обозначены как интеллектуальная персональная система наблюдения (система IPM). Как правило, обработанные данные для системы IPM могут быть выданы в виде предупреждений или рекомендаций водителю посредством различных устройств, включая тактильную педаль, систему индикации на лобовом стекле, устройство звукового предупреждения, голосовую систему и т.д.
На Фиг.1 показано взаимодействие между системой 10 IPM в соответствии с одним вариантом осуществления с другими компонентами/подсистемами 12 транспортного средства 14. К компонентам/подсистемам 12 могут относиться датчики 16, 18 транспортного средства (например, датчик скорости рыскания, датчик угла поворота рулевого колеса, датчик бокового ускорения, датчик продольного ускорения, датчик скорости вращения колеса, датчик давления при торможении и так далее), приводы 20 и один или более контроллеров 22. Один или более контроллеров 22 могут включать в себя контроллер 24 устойчивости, схему 26, реализующую арбитражную логику, и другие контроллеры/системы 28 (например, антиблокировочная тормозная система (ABS), противобуксовочная тормозная система и т.д.).
Для любой системы управления способ размещения может играть определенную роль в разработке эффективной модели управления. Аналогичным образом тип поведения водителя является важным для формулировки эффективных и соответствующих ситуации рекомендаций. Следовательно, может потребоваться определение стиля вождения. В настоящем описании рассматриваются способы определения характеристик поведения водителя на основании его способа эксплуатации транспортного средства. После изучения модели поведения водителя и составления соответствующей характеристики предлагается подход, при котором могут быть установлены поведение/стиль вождения и/или опыт вождения, например, на основании частоты и продолжительности вождения в условиях приближения к пределу управляемости, а также на основании других параметров. Характеризующая водителя информация может быть использована для различных целей, некоторые варианты будут рассмотрены ниже.
II. Краткое описание контроля устойчивости транспортного средства
Управляемость ТС определяет способность ТС совершать поворот и различные маневры. Для максимизации управляемости ТС должно постоянно иметь контакт с дорогой всеми четырьмя шинами. При превышении предела сцепления колесо либо уходит в занос, либо буксует, либо проскальзывает. Состояние, при котором одна или нескольких шин превышают пределы сцепления, может быть названо состоянием предельной управляемости, соответственно предел сцепления можно назвать пределом управляемости. Как только колесо достигает предела управляемости, среднестатистический водитель обычно теряет контроль над ситуацией. В так называемом случае недостаточной поворачиваемости автомобиля машина не реагирует на вращение руля водителем, передние шины переходят свой предел сцепления, а ТС продолжает двигаться вперед независимо от вращения руля водителем. В так называемом случае избыточной поворачиваемости автомобиль поворачивает на больший угол, чем это задается водителем с помощью поворота руля, задние колеса переходят свой предел сцепления, ТС уходит в занос. Для обеспечения безопасности большинство ТС выполнены по принципу пониженной реакции автомобиля на поворот руля при достижении пределов управляемости.
Для того чтобы вернуть управление ТС в случае, когда водитель теряет управление или при приближении или выходе за пределы управляемости, электронные системы курсовой устойчивости (ESC) разработаны таким образом, чтобы перераспределить усилие между колесами и создать момент, который может эффективно развернуть ТС в соответствии с рулевым управлением водителем. А именно, управлять ТС, не допуская возникновения недостаточной или избыточной поворачиваемости автомобиля.
С момента своего появления в 1995 году электронные системы контроля устойчивости (ESC) были внедрены на различных платформах. Данные системы постепенно вводились в течение модельного 2010 года и к 2012 модельному году стали устанавливаться повсеместно. Федеральный стандарт безопасности автомобилей 126 требует установки электронных систем контроля устойчивости (ESC) на всех ТС, полный вес которых составляет менее 10000 фунтов. Электронные системы контроля устойчивости (ESC) могут быть выполнены в качестве дополнения к антиблокировочной тормозной системе (ABS) и всережимным противобуксовочным тормозным системам (TCS). Они могут обеспечивать поддержку курсовой и поперечной устойчивости динамики ТС относительно необходимой водителю траектории. Данные системы также могут распределять давление при торможении (выше или ниже уровня, задаваемого водителем) на каждое колесо, чтобы создать активный момент для противодействия неожиданным отклонениям от заданного направления движения и боковым смещениям ТС. Это позволит улучшить рулевое управление при достижении пределов управляемости при любых условиях сцепления с дорогой при торможении, ускорении или движении по инерции. В частности существующие на данный момент электронные системы контроля устойчивости (ESC) сравнивают задаваемую водителем траекторию движения с реальным откликом ТС на основании данных, полученных от расположенных на ТС датчиков. Если отклик ТС отличается от задаваемой траектории движения (при недостаточной или избыточной поворачиваемости автомобиля) контроллер электронной системы контроля устойчивости (ESC) начинает процесс торможения выбранного(-ых) колеса(-с) и снижает крутящий момент двигателя, если необходимо держать ТС на заданной траектории движения и минимизировать потери управляемости ТС.
Достижение предела управляемости может быть обнаружено с помощью данных, которые уже имеются в электронных системах контроля устойчивости (ESC), поэтому новые датчики могут быть не нужны. Рассмотрим, например, ТС, оснащенное электронной системой контроля устойчивости (ESC), использующей датчик скорости рыскания, датчик угла поворота рулевого колеса, датчик бокового ускорения, датчики скорости вращения колеса, датчик давления главного тормозного цилиндра, измеритель продольного ускорения и т.д. Изменения движения ТС определены в системах координат в соответствии с ISO-8855, когда рама, закрепленная на корпусе ТС, находится в вертикальном положении, продольная ось проходит вдоль продольного направления корпуса ТС, а поперечная ось направлена от пассажира к водителю.
По существу, приборы управления с обратной связью по стабилизации ТС могут быть рассчитаны на основании индивидуальных переменных параметров движения, таких как скорость рыскания, угол бокового скольжения или их комбинации вместе с разрешением конфликтных ситуаций между командами других приборов управления, таких как торможение, запрос крутящего момента, ABS и TCS. Управляющие команды по стабилизации ТС описаны далее.
Известная модель движения велосипеда описывает также движение ТС, его скорость рыскания ωz вдоль вертикальной оси корпуса ТС и угол бокового скольжения βr, определяемый у задней оси, и подчиняется следующим уравнениям:

где νx - скорость движения ТС, М и Iz - общая масса и поворачивающий момент инерции ТС, cf и cr - устойчивость на поворотах передних и задних колес, bf и br - расстояния от центра тяжести ТС до передней и задней осей, b=bf+br, Mz - активный момент, действующий на ТС, и δ - угол поворота переднего колеса.
Целевые скорость рыскания ωzt и угол бокового скольжения βrt, используемые для отображения ожидаемого поворота, могут быть рассчитаны из уравнения (1), используя измеряемые угол поворота рулевого колеса δ и вычисляемую скорость движения νx в качестве входных данных. При таком расчете принимается, что управление ТС осуществляется по дороге, поверхность которой находится в нормальном состоянии (например, высокий уровень трения с номинальной устойчивостью на поворотах cf и cr). При этом также может быть осуществлено преобразование сигнала, фильтрация и нелинейные поправки предела устойчивого состояния при движении на повороте для точной настройки целевой скорости рыскания и целевого угла бокового скольжения. Данные рассчитываемые целевые значения характеризуют намеченную водителем траекторию движения по нормальной дороге.
Контроллер скорости рыскания с обратной связью по существу представляет собой контроллер с обратной связью, производящий расчета на основании ошибки по рысканию (разница между измеряемой скоростью рыскания и целевой скоростью рыскания). Если ТС поворачивает налево и ωz≥ωzt+ωzdbos (где ωzdbos - изменяющаяся во времени слепая зона), или ТС поворачивает направо и ωz≤ωzt-ωzdbos, то ТС начинает чрезмерно реагировать на поворот руля, активируется функция управления при избыточной поворачиваемости ТС в ESC. Например, активный крутящий момент (действующий на ТС для снижения избыточной поворачиваемости) может быть рассчитан следующим образом:

где kos - величина, которая зависит от скорости и может быть задана следующим образом:

где k0, kdbl, kdbu, νxdbl, νxdbu - настраиваемые параметры.
Если ωz≤ωz-ωzdbus (где ωzdbus - изменяющаяся во времени зона нечувствительности) при повороте ТС налево, или ωz≥ωz+ωzdbus при повороте ТС направо, активируется функция управления недостаточной поворачиваемостью автомобиля в системе ESC. Необходимый активный крутящий момент может быть рассчитан следующим образом:

где kus - настраиваемый параметр.
Контроллер угла бокового скольжения с обратной связью представляет собой контроллер с обратной связью, дополнительный к вышеупомянутому контроллеру рыскания при избыточной поворачиваемости. Он сравнивает оценку угла бокового скольжения βr с целевым углом бокового скольжения βrt. Если разница превышает пороговое значение βrdb, активируется контроллер угла бокового скольжения с обратной связью. Например, необходимый активный крутящий момент рассчитывается следующим образом:

где kss и ksscmp - настраиваемые параметры, а 
Другие условия управления с обратной связью, основанные на переменных значениях, таких как ускорение рыскания и крутизна бокового скольжения, могут быть получены аналогичным образом. Когда основная переменная движения ТС представляет собой либо скорость рыскания, либо угол бокового скольжения, вышеупомянутый активный крутящий момент может быть непосредственно использован для определения необходимого управляющего воздействия на ведущее колесо(-а) и величины давления при торможении, подаваемого на соответствующее ведущее колесо(-а). Если динамические характеристики ТС, в основном, состоят из различных переменных движения, конфликты устройств управления будут разрешены и им будут присвоены соответствующие приоритеты. Конечный определяемый активный крутящий момент используется для принятия решений по управлению ведущим колесом(-ами) и соответствующему давлению при торможении. Например, при избыточной поворачиваемости автомобиля в качестве ведущего выбирается переднее внешнее колесо, в то время как при недостаточной поворачиваемости автомобиля в качестве ведущего выбирается заднее внутреннее колесо. При большом боковом скольжении в качестве ведущего колеса всегда выбирается переднее внешнее колесо. При одновременном возникновении бокового скольжения и рыскания из-за избыточной поворачиваемости автомобиля значение тормозного давления может быть рассчитано путем совместного использования команд по управлению ошибкой по рысканию и углом бокового скольжения.
Помимо вышеописанных ситуаций превышения предела управляемости из-за рулевых маневров водителя, ТС может достичь предела управляемости при движении в продольном направлении. Например, торможение на заснеженной и покрытой льдом дороге может привести к блокировке колес, что увеличивает тормозной путь ТС. Открытие регулятора подачи топлива на такой дороге может привести к тому, что колеса будут вращаться, а ТС при этом двигаться вперед не будет. По этой причине предел управляемости также может использоваться для данных условий вождения, не связанных с рулевым управлением. Таким образом, условия максимальных значений продольного торможения шин или движущих сил также могут быть учтены при определении предела управляемости.
Функция ABS отслеживает вращение отдельных колес относительно скорости движения ТС, которая может быть оценена с помощью коэффициентов продольного скольжения λi, где i=1, 2, 3, 4 для переднего левого, переднего правого, заднего левого и заднего правого колес, которые рассчитываются следующим образом
где tf и tr - половина пути передней и задней осей, ωi - выходное значение датчика скорости i-го колеса, κi - поправочный коэффициент скорости i-го колеса, νy - поперечная составляющая скорости ТС в центре тяжести, νmin - предустановленный параметр, отражающий допустимую минимальную продольную скорость. Отметим, что уравнение (6) не подходит при движении задним ходом. Когда торможение, инициированное водителем, приводит к слишком большому боковому скольжению колеса (например, -λi≥λbp=20%), система ABS сбрасывает тормозное давление на этом колесе. Подобным образом, при большой подаче топлива, вызывающей сильное боковое скольжение i-го ведомого колеса, система TCS активирует снижение крутящего момента двигателя и/или тормозного давления на противоположном колесе на той же оси. Следовательно, срабатывание системы ABS или TCS может быть предсказано путем наблюдения за тем, насколько значение коэффициента λi, близко к значениям λbr и λtp.
III. Интеллектуальное устройство контроля предела управляемости
В то время как вышеупомянутая система ESC (включая ABS и TCS) эффективно гарантирует необходимый уровень безопасности, проведение дальнейших усовершенствований тем не менее возможно. Например, может потребоваться усиление систем ESC для управления поперечной устойчивостью. Соответствующая корректировка, которую пробует провести ESC, может быть остановлена водителем или внешними условиями. Сила, действующая на колеса ТС, движущегося с превышением скорости, не обеспечивает сцепления колес с дорогой, в результате чего ТС может потерять способность избежать аварии, вызванной недостаточной поворачиваемостью автомобиля даже при вмешательстве ESC.
Рассмотрим взаимодействие водителя и системы ESC, которые могут работать совместно для улучшения характеристик управления системой с участием водителя. В некоторых вариантах осуществления настоящего изобретения предлагаемое интеллектуальное устройство контроля предела управляемости (HLM) определяет то, как близко текущие условия движения находятся к пределу управляемости.
По существу, точное определение условий достижения предела управляемости включает в себя непосредственные измерения параметров дороги и характеристик колес или подробную информацию о различных переменных параметрах, если проведение прямых измерений невозможно. В настоящий момент оба способа не являются достаточно проработанными с точки зрения их использования в режиме реального времени.
За счет наличия обратной связи системы ESC могут быть выполнены с возможностью определения условий возможного достижения предела управляемости через отслеживание переменных параметров движения ТС, подобных тем, что описаны выше. Когда переменные значения движения отклоняются от их эталонных значений на определенную величину (например, выходят за пределы определенных зон нечувствительности), системы ESC могут начать формирование различных команд управления торможением и определять ведущее колесо(-а). Соответствующее давление при торможении подается на ведущее колесо(-а) для стабилизации ТС. Точка срабатывания системы ESC может быть определена как граница предела управляемости.
В частности, может быть определена относительная граница предела управляемости hx следующим образом:
где x - отклонение переменного параметра движения от эталонного значения, [
Преимущество hx, определенного в (8), заключается в том, что условия вождения могут быть количественно отнесены к разным категориям. Например, когда hx≤10%, условия вождения могут быть отнесены к красной зоне, когда водителю необходимо проявить особое внимание или предпринять некоторые дополнительные действия (например, снизить скорость ТС); когда 10%<hx<40%, условия вождения могут быть отнесены к желтой зоне, когда необходимо уделить немного больше внимания со стороны водителя, чем обычно; когда 40%<hx≤100%, условия вождения могут быть отнесены к нормальным условием движения. В нормальных условиях движения водителю нужно поддерживать внимание на обычном уровне. Конечно, могут быть использованы и другие интервалы.
Для предупреждения водителя о достижении предела управляемости могут быть использованы различные звуковые и/или визуальные предупреждения. Когда hx≤10%, например, может быть активировано световое или тактильное устройство для информирования водителя о необходимости сбавить скорость. Также голосовая система может сообщить водителю информацию о дальнейших действиях. Когда 10%<hx<40%, звуковой сигнал или дисплей может информировать водителя о приближении к условиям неустойчивости и т.д.
В частности, можно использовать описанные выше переменные управления для расчета значений hxS. Граница предела управляемости скоростью рыскания ТС в ситуациях избыточной поворачиваемости hOS (где ωz>ωzt, когда ТС поворачивает налево и ωz>ωzt, когда ТС поворачивает направо) может быть рассчитана из (8) путем задания x=ωz-ωzt и 
Аналогичным образом предел управляемости скоростью рыскания ТС hUS в ситуациях недостаточной поворачиваемости может быть рассчитан из уравнения (8) путем задания x=ωz-ωzt и 
Предел управляемости боковым скольжением ТС hsspA может быть вычислен из уравнения (8) путем задания x=βr-βrt и 
Пределы продольной управляемости ТС учитывают условия, когда движущая сила или сила торможения колес приближается к пределу управляемости. Граница предела управляемости сцеплением для i-го ведомого колеса hTCS может быть получена из (8) путем задания x=λi, 




Заметим, что дальнейшее отображение условий может быть использовано при расчете вышеупомянутых границ предела управляемости. Например, может быть использовано одно из следующих условий или комбинация некоторых следующих условий для задания границы предела управляемости, равной 0: величина целевой скорости рыскания находится за пределами определенного порогового значения; величина измеряемой скорости рыскания превышает определенное пороговое значение; входные данные рулевого управления водителя превышают определенное пороговое значение; или предельные условия, например, превышение ускорения при движении на повороте более чем на 0,5 g, торможение ТС превышает 0,7 g, TC движется на скорости, превышающей определенное пороговое значение (например, 100 миль в час) и т.д.
Для того чтобы проверить вышеупомянутые расчеты границы предела управляемости и проверить их эффективность в конкретных условиях, было проведено тестирование с использованием TC, оснащенного экспериментальной системой ESC, разработанной компанией «Ford Motor Company».
Условия вождения, задаваемые скоростью TC, степенью подачи топлива (открывания дроссельной заслонки) и торможением, изображены на Фиг.2, а измеряемые и рассчитываемые переменные параметры движения TC показаны на Фиг.3А-3С. Соответствующие индивидуальные границы предела управляемости hUS, hOS, hTCS, hABS, и hSSRA показаны на Фиг.4А-4С. Данное испытание проводилось при произвольном движении по кривой на заснеженной дороге во время работы всех устройств системы ESC. Функция подачи давления при торможении была отключена для того, чтобы TC приблизилось к условиям предела управляемости.
Для проведения другого теста TC двигалось по дороге с высоким уровнем трения. Значения скорости TC, графики сцепления и торможения во время данного теста приведены на Фиг.5. Режимы движения TC показаны на Фиг.6А-6С. Соответствующие индивидуальные границы предела управляемости hUS, hOS, hTCS, hABS, и hSSRA показаны на Фиг.7А и 7В.
Функция зависимости от всех отдельных границ предела управляемости описывается следующим выражением:

Принимая во внимание то обстоятельство, что внезапные изменения функции границ предела управляемости могут быть связаны с помехами, для сглаживания изменения henv используется низкочастотный фильтр F(z) для получения итоговой границы предела управляемости

Для тестовых данных ТС, показанных на Фиг.2 и Фиг.3А-3С, итоговая граница предел управляемости приведена на Фиг.9А, в то время как для тестовых данных ТС, показанных на Фиг.5 и Фиг.6А-6С, итоговая граница предела управляемости приведена на Фиг.10А.
IV. Характеристика стиля вождения на пределе управляемости
Далее будет использована итоговая граница предела управляемости, полученная в (11), чтобы охарактеризовать управляемость ТС с точки зрения условий и стиля вождения. Вводится понятие фактора риска управляемости (HRF) как степени оценки того, как условия вождения соотносятся с пределом управляемости. Фактор риска управляемости г определяется как дополнение итоговой границы предела управляемости h, т.е.

Фактор риска управляемости минимален (r=0), когда итоговая граница предела управляемости h максимальна (h=1), и наоборот. Фактор риска управляемости (HRF) в дальнейшем может быть использован для создания вероятностной модели, описывающей различные категории стилей вождения, которые отражаются в текущих условиях вождения по отношению к пределу управления.
По существу, осторожный водитель обычно ведет автомобиль без частого проявления агрессии, т.е. быстрых смен угла поворота руля, скорости и ускорения. Следовательно, разумно будет охарактеризовать осторожного водителя как того, кто постоянно избегает использования экстремальных действий при вождении и приближения к максимальному риску управляемости. Среднестатистический водитель обычно имеет более высокий уровень фактора риска управляемости (HRF), чем осторожный водитель. Опытный водитель может обладать большими навыками в управлении ТС, то есть он может управлять автомобилем на относительно высоком уровне риска управляемости (HRF) в течение продолжительного периода времени без превышения автомобилем максимального предела управляемости. Крайне неосторожный водитель (лихач) проявляет легкомысленное поведение при управлении ТС, которое непредсказуемо и может приводить к быстрым изменениям. Предполагается, что крайне неосторожный водитель управляет автомобилем на уровне риска управляемости, который может время от времени очень быстро приближаться к максимуму (r=1), тем самым приводя к частому срабатыванию соответствующих систем безопасности (например, ABS, TCS, ESC).
Отметим, что разница между опытным водителем и крайне неосторожным водителем заключается в том, что первый может выдерживать условия вождения на относительно высоком уровне фактора риска управляемости (HRF) в течение долгого периода времени, а последний может удерживаться на подобном уровне только в течение непродолжительного периода времени, что приводит к тому, что ТС переходит максимальный предел управляемости по причине низкой управляющей способности водителя. Так как диапазоны фактора риска управляемости, определяющие, например, осторожное, среднестатистическое, опытное и крайне неосторожное поведение при вождении (относительно условий предела управляемости) не могут быть достаточно точно определены, мы используем нечеткие подмножества для количественного определения четырех категорий водителя. Далее мы оцениваем данные категории независимо в вероятностном отношении на основании особого стиля водителя. Нечеткие подмножества, ассоциируемые с четырьмя категориями водителей (осторожный, среднестатистический, опытный, крайне неосторожный) могут быть описаны следующими функциями участников
µc(r), µe(r), µa(r), µr(r),
определенными совокупностью факторов риска управляемости (HRF) [0,1]. На Фиг.8 показано отношение между степенями отношения для каждой из данных категорий и фактора риска управляемости (HRF).
Функции принадлежности на Фиг.8 могут быть заданы для любого события, которое представлено особым фактором риска управляемости (HRF) со значением rk, используя четырехмерный вектор
Dk=[µc(rk)µe(rk)µa(rk)µr(rk)]T
от степени их принадлежности к каждой из четырех примерных категорий: осторожный, среднестатистический, опытный и крайне неосторожный. Например, величина фактора риска управляемости (HRF) rk=0,4 (соответствующая величине границы предела управления hk=0,6) будет переведена в степени отношения к категориям: осторожный, среднестатистический, опытный и крайне неосторожный
µc(0,4)=0,46, µe(0,4)=0,85
µa(0,4)=0,09, µr(0,4)=0,22
Степени принадлежности в закодированной форме представляют вероятности, что событие, характеризуемое фактором риска управляемости (HRF) r=0,4 (или границей предела управляемости h=0,6), может относиться к любой из четырех примерных категорий. Вектор значений принадлежностей dk определяет соотношение между каким-то одним событием во время вождения и возможной характеристикой водителя по отношению к фактору риска управляемости (HRF) данного события. Для создания характеристики поведения водителя в долгосрочном периоде необходима вероятностная интерпретация возможностей, создаваемых множеством событий. Добавляя значения принадлежности для каждого события, по существу объединяют все существующие возможности, позволяющие охарактеризовать конкретного водителя как осторожного, среднестатистического, опытного или крайне неосторожного, то есть вектор.

где N - количество водителей. Общие вероятности могут быть рассмотрены как частоты (так называемые нечеткие частоты), так как они показывают то, как часто и в какой степени факторы риска управляемости (HRF) для множества событий могут быть последовательно распределены на 4 примерных категории. Альтернатива сложению вероятностей, то есть добавлению функции принадлежности, заключается в добавлении 1, если особая степень µi(rk), i∈{c,a,e,r} принадлежности больше предписанного порогового значения, то есть 0,8 или, в противном случае, 0, что приводит к сложению обычной частоты четырех примерных категорий. Из объединенных возможностей мы можем подсчитать вероятности осторожного, среднестатистического, опытного или крайне неосторожного стиля водителя

где i∈{c,a,e,r}. Вероятности подсчитываются из суммы вероятностей (нечетких частот) и могут быть рассмотрены как нечеткие вероятности. Причиной нечеткости здесь является недостаток определенности при составлении характеристики отношения между четырьмя примерными категориями и фактором риска управляемости (HRF). В особых случаях, когда категории четко определены (представлены интервалами, а не нечеткими подмножествами) возможности преобразуются в булевы значения, их суммированные значения становятся частотами и, следовательно, нечеткие вероятности переводятся в обычные вероятности.
Наиболее вероятной категорией водителя i* является та, которая характеризуется наибольшей вероятностью, то есть

Расчет вероятностей, основанный на частотах, может быть выражен через средние частоты

В альтернативном варианте осуществления изобретения расчет вероятностей может быть выражен через экспоненциально взвешенные средние частоты, когда больший вес назначается вероятностям, связанным с наиболее поздними событиями. Численно процесс формирования средних взвешенных значений с большим весом, соответствующим последним наблюдениям, может быть проведен с помощью низкочастотного фильтра, реализующего алгоритм экспоненциального сглаживания во времени.

где постоянный фактор забывания 0<α≤1 регулирует коэффициент обновления среднего значения d* путем назначения набора весов, которые экспоненциально снижаются при устаревании данных. Для постоянного фактора забывания а выражение (17) рекурсивно формирует вектор положительных весов

с единичной суммой. Вектор W задает оператор объединения средневзвешенного типа с экспоненциально уменьшающимися весами, которые представлены в виде параметра в коэффициенте забывания а. Параметр а определяет емкость памяти (ширину следящего окна) средневзвешенного оператора категории. Следовательно, отфильтрованное значение d* вектора степени принадлежности в уравнении (17) представляет средневзвешенные величины индивидуальных возможностей через веса W. Так как все объединенные возможности рассчитываются через одно и то же следящее окно шириной Kα=1/α, можно рассматривать их как представления частот объединения с каждой из четырех концепций. Средневзвешенная величина уравнения (17) рассчитывается через события с индексами, принадлежащими гибкому интервалу

где символ { показывает нечеткую нижнюю границу, которая включает значения с более низкими индексами, чем (k-Kα), роль которых относительно невелика. Следовательно, объединенные возможности из вектора d* могут быть преобразованы в вероятности в соответствии с выражением (14).
В некоторых вариантах осуществления а может быть выбрана таким образом, чтобы составлять характеристику на определенный желаемый период времени. Например, пользователь может задать входной параметр, зависящий от α, из условия, что характеристика составляется каждые полчаса. Другие варианты действий также возможны.
Для тестирования ТС, представленного на Фиг.2, 3А-3С и 4А-4С, на Фиг.9В приведены индивидуальные значения 

Вычисленные вероятности определяют наиболее похожую характеристику водителя на основании фактора риска управляемости (HRF) в течение временного интервала, указанного через фактор забывания а. Изменяя следящее окно, можно изучить и составить долгосрочную и краткосрочную характеристику конкретного водителя на основании фактора риска управляемости (HRF).
Для того чтобы предсказать влияние изменений фактора риска управляемости (HRF) на характеристику водителя, мы вводим понятие переходных вероятностей. Марковская модель P вероятностно описывает набор переходов между текущим и предсказываемым значением категории водителя:
где pij - вероятность переключения с категории i в момент времени k на категорию j в момент времени k+1, а pii=max(pi) - вероятность, которая относится к преобладающей категории i в момент времени k, i,j∈{c,a,e,r}. Переходные вероятности pij получены из переходных объединенных вероятностей, которые обновляются, только если i=arg max(p1) в момент времени k и j=arg max(p1), l∈{c,a,e,r}.

Затем переходные вероятности рассчитывают путем преобразования объединенных переходных вероятностей в вероятности. Максимальная переходная вероятность pij определяет переход из категории i в категорию j как наиболее вероятный переход.
Как показано на Фиг.11А и 11В, тест ТС ипользуется для проверки долгосрочной характеристики поведения водителя. Обычно водитель демонстрирует осторожный стиль вождения (при этом он может быть новичком, водителем со средним или большим опытом). В районе отметки 190 секунд ТС совершило поворот с некоторой долей агрессивности, что отобразилось в виде пика на графике фактора риска управляемости (HRF), стиль вождения перешел в среднюю категорию. Так как больше значительных событий в изменении HRF не было обнаружено, до конца данного цикла вождения была реализована данная категория в сочетании с концепцией долговременной характеристики.
Как было упомянуто выше, для предупреждения водителя о приближении к пределу управляемости могут быть активированы различные звуковые и/или визуальные предупреждения. Пороговые значения границы, которые определяют, будет ли дано предупреждение (и/или какого типа оно будет), могут быть изменены (или взвешены) на основании характеристики водителя. Например, если определено, что водитель является опытным, пороговое значение предупреждения может быть снижено с hx≤10% до hx≤2%, или могут быть взвешены предупреждения в отношении предела управляемости (опытному водителю предупреждения могут не понадобиться).
IV. Характеристика неуправляемого стиля вождения
При нормальном маневре во время вождения долгосрочный контроль ТС водителем может быть использован для определения поведения при вождении независимо от динамических характеристик ТС. Например, водитель может демонстрировать особую модель продольного управления при движении по трассе в течение продолжительного периода времени. Нажатие на педаль газа может быть плавным или резким даже при отсутствии аварийных условий. Изменчивость работы педали и изменение скорости могут быть использованы для проведения различий между плавными и резкими нажатиями. Такое плавное или резкое нажатие представляет сильную взаимосвязь между экономией топлива и ускорением в непринужденных условиях вождения. Распознавание такого поведения при вождении может быть использовано, например, для внедрения системы рекомендаций по экономии топлива.
Обнаружение аномалий может быть использовано для оценки основных изменений в общей изменчивости управляющих действий, указывающих на изменение в соответствующем поведении. Обнаружение аномалий - техника, которая уделяет особое внимание непрерывному наблюдению, машинному обучению и неконтролируемой классификации для установления тенденции отклонения от нормального поведения и предсказания потенциальных изменений. Определитель ковариационной матрицы множества действий водителя может быть использован как мера обобщенной изменчивости (разброса) множества действий и, следовательно, как показатель изменений в поведении водителя.
Пространство признаков запроса крутящего момента τd и их производные охватываются вектором 

с

где νk - отфильтрованное значение yk, Qk - вычисленная обратная ковариационная матрица, α - константа, которая отражает фактор забывания, относящийся к глубине памяти фильтра.
Таким образом, Dk, полученный из уравнения (21), имеет начальные средние значения и стандартные отклонения для резкого и плавного типов вождения. Поведение в определенный момент классифицируется как резкое, если значения определителя Dk выше контрольного предела lрезк. и классифицируется как плавное, если его значение ниже контрольного предела uплав.
lрезк. и uплав. определены как lрезк.=µрезк.-3σрезк, uплав.=µплав.+3σплав.,
где µрезк. и σрезк. - среднее отклонение и стандартное отклонение резкого типа поведения. µплав. и σплав. аналогично определяются для плавного типа поведения. Если текущее поведение классифицируется как резкое или плавное, то соответствующие среднее отклонение и стандартное отклонение соответствующего поведения рекурсивно обновляются:

где ω и Н - рассчитанное среднее отклонение и величина отклонения, и β - другой фактор забывания.
На Фиг.12 показан определитель ковариационной матрицы на основании вектора положения педали газа и его изменения при проведении 8 тестирований. 4 тестирования, показанные сплошными линиями, определителя соответствуют резким движениям педали газа. Данные определители показывают большое значение, например больше 7. 4 тестирования, показанные пунктирными линиями, определителя соответствуют плавным движениям педали газа. Определители показывают небольшое значение, например, меньше 4. Следовательно, величина определителя раскрывает уникальные информационные модели, которые могут быть использованы, чтобы отличить поведение при плавном вождении от поведения при резком вождении.
Так как взаимодействия водителя и среды вождения включают в себя частые остановки ТС различной продолжительности, то для предотвращения числовых проблем при рекурсивном расчете может потребоваться временная остановка постоянного процесса обновления. Для определения временной остановки могут быть использованы следующие условия: (i) Если скорость ТС меньше 1 мили в час, то соответствующие рекурсивные расчеты скорости ТС и ускорения приостанавливаются, (ii) Если изменение положения педали ускорения менее 1%, то связанные с положением педали рекурсивные расчеты приостанавливаются.
Несмотря на то, что вышеприведенное отклонение сфокусировано на педали газа, оно также может быть использовано для случая торможения. Так как внезапное резкое торможение может происходить во время аварийных ситуаций (которые не обязательно являются показателем общего поведения водителя), то вождение в относительно устойчивом состоянии (без экстренного торможения) может быть использовано для расчетного наблюдения.
Во время кратковременного ускорения или замедления определенные колеса ТС могут попадать в большой продольный занос, и продольные силы таких колес могут достигать своих максимальных значений. Такие условия можно отследить через наблюдение за вращением каждого колеса в отдельности относительно скорости передвижения ТС, и, следовательно, поведение водителя при кратковременных маневрах может быть определено так, как описано выше.
V. Характеристика стиля вождения с неполным управлением
Все управляющие воздействия водителя могут отслеживаться электронными системами управления. Тем не менее, определенные переменные могут составлять пару вход-выход, которая может быть использована для того, чтобы установить структуру управления водителя. Например, при выполнении маневра по следованию за другим автомобилем относительное расстояние между двигающимся впереди и следующим автомобилями, а также команды водителя на торможение и на подачу топлива обычно хорошо скоординированы. Здесь рассмотрено использование модели Тагаки-Сугено, чтобы соотнести изменение команд водителя на торможение и подачу топлива с относительным расстоянием и скоростью двигающегося впереди и следующего за ним автомобилей.
Нечеткая система может использовать обусловленное сигналом среднее значение при движении вперед относительно другого ТС, а также стандартное отклонение изменений интенсивности работы педали газа и педали тормоза, чтобы определить, является ли манера вождения данного водителя агрессивной или осторожной. Коэффициент водителя, заданный из нечеткого расчета и оценки правил, может определять степень агрессивности водителя на основании следования за машиной, скорости ТС и управляющих действий водителя по ускорению и замедлению.
Для реализации данного варианта в ТС в режиме реального времени применяется рекурсивная оценка среднего значения и колебания интересующей в данном случае переменной. Обусловленный сигналом средний промежуток времени в момент времени k может быть рассчитан как

где Δsk - относительное расстояние между движущимся впереди и следующим ТС, νfk - скорость следующего ТС, α - коэффициент фильтра, аналогичный тому, что используется в (22). На Фиг.13А и 13В показаны средние промежутки времени, рассчитанные на основании 2 тестирований ТС: одно для агрессивного вождения и другое - для осторожного.
Среднее значение интенсивности работы педали газа может быть рассчитано как

где 

и стандартное отклонение получают путем извлечения квадратного корня из колебания. На Фиг.14А и 14В показаны стандартные отклонения двух тестовых данных двух испытаний для агрессивного и осторожного вождения.
Подобно (25) и (26) могут быть рассчитаны среднее значение и колебание изменений интенсивности работы педали тормоза. На Фиг.15А и 15В показаны стандартные отклонения тестовых данных двух испытаний для агрессивного и осторожного вождения. Перед предоставлением в виде нечеткой системы гипотетических умозаключений переменные нормализуются. Нечеткие множества и функции принадлежности были определены для преобразования разрозненных входных сигналов в составляющие нечетких множеств. Нечеткое множество средних промежутков времени Gs определяется как

где G представлено ограниченной совокупностью промежутков времени g в пути ТС. В качестве функции принадлежности промежутков времени µ выбрана функция Гаусса.
Модель Тагаки-Сугено нулевого порядка была использована для расчета уровня коэффициента водителя. Нормализованная шкала выходных значений от 0-1,0 представляет уровни от осторожного до не очень агрессивного и агрессивного поведения при вождении. Коэффициент водителя получают из расчета на основании нечеткой логики и вероятностной оценки правила. В Таблице 1 показаны использованные правила. Заметим, что больший промежуток времени является показателем относительно более сознательного отношения к безопасности по сравнению с меньшим промежутком времени.
На Фиг.16А и 16В показан коэффициент водителя, рассчитанный на основании двух потоков тестовых данных ТС: один для агрессивного вождения с коэффициентом водителя более 0,8 и другой - для осторожного вождения с коэффициентом водителя менее 0,2.
VI. Характеристика контролируемого стиля вождения
Следование за другим автомобилем требует от водителя поддержания по отношению к движущемуся впереди ТС одного из следующих параметров: (i) нулевых различий в скорости; (ii) постоянное относительное расстояние; и (iii) постоянный относительный промежуток времени, определяемый делением относительного расстояния на относительную скорость.
Поведение водителя может быть смоделировано как ПД (пропорционально-дифференциальный) контроллер с обратной связью. Система с замкнутым контуром при маневре по следованию за другим автомобилем может быть выражена как

где xi и xf - расстояния движения движущегося впереди и следующего ТС и 
Благодаря внедрению радиолокации, используемой в ТС, оборудованных функцией адаптивного круиз-контроля, можно изменить относительное расстояние и скорость, которые определяются как

ТС, оснащенное средствами контроля устойчивости, имеет измеритель продольных ускорений с выходом αx, измеряющим 

Неизвестные параметры cν и cs в уравнении (30) могут быть использованы для характеристики структуры управления водителя при следовании за другим автомобилем. Используя прошедшие через низкочастотный фильтр Δs и Δν для замены эталонного смещения промежутка 


где подстрочный индекс i в αx k+i отражает запаздывание во времени между проиводимым водителем торможением или впуском топлива и измеряемыми относительными расстоянием и скоростью и ускорением, α - коэффициент низкочастотного фильтра, аналогичный тому, что используется в (22), и ω - высокочастотный нечеткий сигнал, который может расцениваться как белый шум. Используя условный алгоритм распознавания по меньшей площади, cν и cs могут быть определены в режиме реального времени из уравнения (31). Время отклика tp и коэффициент затухания ζ системы с участием водится могут относиться к cν и cs следующим образом:

что может быть использовано для вычисления манеры вождения данного водителя: (i) для нормального водителя, желательно, чтобы переходная характеристика системы с участием водителя была быстрой (достаточно маленькое значение tp, например, меньше 0,5 сек) и затухающей (достаточно большое значение ζ); (ii) для водителя в возрасте или водителя с физическими ограничениями, значение tp может быть большим; (iii) для агрессивного водителя, значение ζ вероятно будет маленьким, например меньше 0,5, при этом реакция системы вероятно будет показывать чрезмерное отклонение; (iv) для осторожного водителя, значение ζ вероятно будет достаточно большим, например больше 0,7.
Идентификация параметра по меньшей площади была использована для расчета cν и cs. Было проведено два тестирования ТС. При первом тестировании водитель в следующем автомобиле старался использовать агрессивное дросселирование и торможение, чтобы достигнуть постоянного относительного промежутка времени между его автомобилем и двигающемся впереди автомобилем, что привело к появлению большей ошибки соблюдения дистанции Δsk-µk(Δs), как показано на Фиг.17. Определенное значение cν равно примерно 0,2, а определенное значение cs - примерно 0,05, как показано на Фиг.18. Таким образом, коэффициент затухания, рассчитанный из (32), показывал значение менее 0,5, что является показателем легкого демпфирования в системе с участием водителя, что таким образом соответствует агрессивной манере вождения.
При втором тестировании водитель использовал осторожный впуск топлива и торможение для достижения следующего автомобиля, относительная ошибка соблюдения дистанции Δsk-µk(Δs) на Фиг.19 была меньше по сравнению в той, что показана на Фиг.17. Определенные значения cν и cs представлены на Фиг.20. Значение коэффициента затухания превышало 0,8 за исключением первых 150 секунд, как показано на Фиг.20. Это является показателем интенсивного демпфирования в системе с участием водителя, что соответствует осторожной манере вождения.
VII. Варианты применения
Предел управляемости и/или характеристика стиля вождения при проведении должного наблюдения и повышения надежности могут быть использованы для предоставления советов водителю, а также обучения, наблюдения и повышения безопасности. Другой возможный вариант применения относится к возможности персонализации автомобиля через настройку параметров управления для приведения в соответствие с особым стилем водителя. Например, система ESC или система управления торможением может использовать такую характеристику стиля водителя, чтобы привести порог приведения в действие в соответствие с манерой вождения конкретного водителя. В качестве примера: опытному водителю может потребоваться менее частое приведение в действие системы ESC по сравнению с менее опытным водителем в одних и тех же дорожных условиях. При этом может существовать определенное минимальное требование для настройки пороговых значений из условия, чтобы функция ESC активировалась при совершении ошибки опытным водителем.
Другой пример заключается в том, что чувствительность рулевого управления (степень реакции автомобиля на поступающий от водителя сигнал при повороте руля) и чувствительность педали газа (степень реакции автомобиля в ответ на сигнал, поступающий от водителя при нажатии на педаль газа) могут быть настроены на основании характеристики водителя. Рулевое колесо и/или работа педали газа могут быть настроены с большей чувствительностью, если водитель характеризуется как опытный (автомобиль реагирует на действия водителя в большей степени). Рулевое колесо и/или работа педали газа могут быть настроены с меньшей чувствительностью, если водитель характеризуется как осторожный (что потенциально ведет к экономии топлива). Другие варианты применения также являются возможными.
На Фиг.21 показана блок-схема варианта осуществления системы 30 обучения для транспортного средства 32. Система 30 обучения может содержать множество датчиков 34 состояния транспортного средства (например, датчик скорости рыскания, датчик угла поворота рулевого колеса, датчик бокового ускорения, датчик продольного ускорения, датчик скорости вращения колеса, датчик давления при торможении и так далее), один или более контроллеров 36, выполненных с возможностью проведения, например, электронного управления устойчивостью, антизаклинивающего торможения и управления сцеплением, а также управление вышеописанными пределом управляемости и характеристикой водителя, система 38 звуковой и/или визуальной индикации (например, индикаторная панель, акустическая система, ряд светодиодов, порт USB, и так далее), система 40 входных сигналов и/или управления (например, педаль газа, регулятор силовой передачи, рулевое колесо, и так далее).
Датчики 34 состояния транспортного средства могут определять различные параметры, описанные выше, такие как скорость автомобиля, боковое скольжение колеса и т.д., которые характеризуют движение транспортного средства 32 (например, текущее состояние управляемости и условие предела управляемости), а также различные входные сигналы действий водителя, описанные выше (например, положение педали газа и тормоза и так далее). Один и более контроллеров 36 могут использовать информацию в качестве входных данных для предела управляемости и/или алгоритмов составления характеристики водителя, описанных выше. На основании выходных параметров данных алгоритмов один или более контроллеров 36, как описано выше, могут (i) активировать систему 38 звуковой и/или визуальной индикации, чтобы, например, предупредить или обучить водителя или (ii) изменить различные аспекты системы 40 входных сигналов и/или управления, чтобы настроить отклик автомобиля в соответствии с типом водителя.
В качестве примера, на основании информации, собранной датчиками 34, один или более контроллеров 36, выполняющих вышеописанные алгоритмы, могут определить, что вождение водителя транспортного средства 32 является крайне неосторожным. Так как водитель был классифицирован как крайне неосторожный, один или более контроллеров 36 могут, например, давать инструкции по вождению через систему 38 звуковой и/или визуальной индикации, чтобы способствовать смене поведения водителя. Один или более контроллеров 36 могут дополнительно или вместо активировать тактильные элементы системы 40 входных сигналов и/или управления, такие как сенсорная педаль газа, чтобы предупредить водителя о его крайне неосторожном поведении.
Память, к которой осуществляют доступ один или более контроллеров 36, может включать в себя базу данных инструкций (звуковых и/или визуальных), которые записаны в соответствии с определенными предустановленными правилами. Пример правила: если водитель ведет себя крайне неосторожно, степень изменения угла поворота рулевого колеса соответствует некоторому определенному промежутку в течение определенного периода времени (то есть водитель продолжает быстро вращать рулевое колесо по часовой стрелке и против часовой стрелки), то водителю будет дана инструкция уменьшить интенсивность вращения рулевого колеса.
На Фиг.22 показана блок-схема другого варианта осуществления системы 130 обучения для транспортного средства 132, где одинаковым цифрам соответствует такое же описание, что и для Фиг.21. В данном варианте осуществления транспортное средство 132 содержит систему 142 распознавания устройств идентификации, выполненную известным образом с возможностью распознавания устройства 144 идентификации. В качестве примера, устройство 144 идентификации может быть ключом, содержащим чип идентификации, распознающим определенного водителя или класс водителей (например, водители подросткового возраста). В данном примере, система 142 распознавания устройства идентификации может содержать считыватель чипов, установленный известным образом в системе зажигания транспортного средства 132 для считывания чипа идентификации и сообщения данной информации одному или более контроллерам 136. В качестве другого примера, устройство 144 идентификации может быть брелоком для ключей или пластиковой картой, имеющей встроенный чип радиочастотной идентификации. В данном примере система 142 распознавания устройств идентификации может содержать считыватель с чипа радиочастотной идентификации, установленный известным образом внутри транспортного средства 132, чтобы обнаруживать и считывать информацию с чипа радиочастотной идентификации и передавать данную информацию одному или более контроллерам 136. В качестве еще одного примера устройством 144 идентификации может быть сотовый телефон. В данном примере система 142 распознавания устройств идентификации может включать в себя известные модули (такие как технология SYNC (Ford)), выполненные с возможностью распознавания сотового телефона и передачи данной информации одному или нескольким контроллерам 136. Другие варианты организации и планы действий также являются возможными.
На основании идентификации водителя и предела управляемости и/или характеристики стиля вождения, описанных выше, может быть реализовано множество функций. В качестве примера, если система 142 распознавания устройств идентификации предоставляет информацию одному или нескольким контроллерам 136, идентифицируя водителя как подростка, то один или несколько контроллеров 136 могут предоставлять инструкции водителю через систему 138 звуковой и/или визуальной индикации, чтобы опустить заслонку подачи топлива или активировать тормоз при приближении к пределу управляемости. Один или несколько контроллеров 136 могут предоставлять основанные на определенных правилах команды, подобные тем, что описаны выше, чтобы привести в исполнение такие инструкции по вождению. Пример правила: если водитель является подростком и граница достижения предела управляемости менее 15%, тогда водителю дается инструкция сбавить скорость.
В качестве другого примера, если система 142 распознавания устройств идентификации предоставляет информацию одному или нескольким контроллерам 136, идентифицируя водителя как подростка, тогда один или более контроллеров 136 могут записывать историю расчетов приближения к границе предела управляемости и/или составления характеристики стиля вождения водителя, чтобы составить отчеты, описывающие манеру вождения. Данные отчеты, например, могут содержать подробную информацию каждой поездки, количество раз, когда водитель-подросток превысил определенные уровни предела управляемости. Данные отчеты, например, также могут описывать водителя-подростка как осторожного, агрессивного, крайне неосторожного и так далее в течение любой заданной поездки. Такие отчеты могут быть получены, представлены или отображены любым подходящим или известным образом, таким как система 138 звуковой и/или визуальной индикации.
В качестве еще одного примера, на основании вышеописанной идентификации водителя может быть внедрена система обучения и/или инструктирования. Один или несколько контроллеров 136 могут, например, давать инструкции, чтобы водитель передавал такие инструкции транспортному средству 132, чтобы в результате получить квалификацию осторожного водителя. Также, например, если водитель начинает часто ускоряться или сбавлять скорость, один или несколько контроллеров 136 могут проинструктировать водителя через систему 138 звуковой и/или визуальной индикации увеличить дистанцию между транспортным средством 132 и находящимся впереди транспортным средством так, чтобы уменьшить частоту переключений между ускорением и торможением. Для улучшения схемы предоставления инструкций могут быть использованы правила, подобные тем, что описаны выше, или любая другая подходящая технология искусственного интеллекта, например нейросети и т.д. В вариантах осуществления изобретения, где ведется запись манеры вождения для последующего предоставления отчетов, то обстоятельство, принимает водитель инструкции во внимание или игнорирует их, также может быть записано в качестве показателя поведения водителя.
На Фиг.23 показана блок-схема еще одного варианта осуществления системы 230 обучения для транспортного средства 232, где одинаковым цифрам соответствует такое же описание, что и для Фиг.21. Данный вариант осуществления изобретения включает в себя систему 246 радаров и/или камер (с другой стороны, может быть использована любая подходящая системы датчиков для оценки на расстоянии), которая может периодически или непрерывно определять известным образом расстояние между транспортным средством 232 и другим транспортным средством, находящимся впереди транспортного средства 232. Система 230 обучения может также включать в себя систему устройств идентификации и соответствующих возможностей, подобно тому, как это было описано в отношении Фиг.22 (данный вариант не указан). Другие варианты осуществления также возможны.
При определенных обстоятельствах информация о расстоянии, собранная системой 246, может отслеживаться одним или более контроллерами 236. Если расстояние меньше некоторого предопределенного порогового значения (например, 20 футов), один или более контроллеров 236 могут предупредить водителя через систему 238 звуковой и/или зрительной индикации и/или активировать элементы системы 240 входных сигналов и/или управления, если они принадлежат к тактильному типу (например, тактильная педаль газа, тактильное рулевое колесо, тактильное сиденье и т.д.).
При других обстоятельствах, информация о расстоянии, X, собранная системой 246, вместе с изменением расстояния за период времени, Vx, и продольным ускорением транспортного средства 232, Ax, может быть использована одним или более контроллерами 236 для определения времени до столкновения, tc, с транспортным средством, идущим впереди транспортного средства 232, с помощью следующего уравнения
или Х

Если время до столкновения меньше предопределенного порогового значения, тогда один или более контроллеров 236 могут предупредить водителя так, как описано выше.
При других обстоятельствах один или более контроллеров 236 могут определять порог предупреждения на основании промежутка времени (описано выше) между транспортным средством 232 и впереди идущим транспортным средством. Если промежуток времени меньше порогового значения, тогда один или более контроллеров 236 могут, например, активировать сенсорные элементы системы 240 входных сигналов и/или управления транспортным средством (начнут вибрировать) и так далее.
В альтернативном варианте осуществления изобретения один или более контроллеров 236 могут получить доступ к таблицам расстояния и скорости или относительной скорости, чтобы определить, когда предупреждать водителя. В качестве примера, если расстояние соответствует определенному промежутку и скорость соответствует определенному промежутку, тогда один или более контроллеров 236 могут активировать тактильную педаль газа. Другие планы действий также возможны.
Интенсивность (частота и/или амплитуда), с которой активируются сенсорные элементы системы 240 входных сигналов и/или управления, может зависеть от расстояния, времени до столкновения, промежутка времени и т.д., между транспортным средством 232 и впереди идущим транспортным средством. В качестве примера, интенсивность может увеличиваться при уменьшении данных параметров. Данная увеличивающаяся интенсивность может служить сигналом возрастающей срочности.
Предустановленные пороговые значения могут зависеть от типа водителя. То есть один или более контроллеров 236 могут внедрять вышеописанные алгоритмы составления характеристики водителя и на основании характеристики увеличивать или уменьшать пороговые значения предупреждения. Пороговое значение может быть уменьшено, например, для опытного водителя, так как менее вероятно, что такой водитель попадет в аварию на основании несоблюдения дистанции. Пороговое значение может быть увеличено для крайне неосторожного или агрессивного водителя, потому что для такого типа водителей вероятность попадания в аварию в результате несоблюдения дистанции выше, и так далее.
Предустановленные пороговые значения могут быть изменены на основании того, следует ли водитель предоставляемым ему указаниям. В качестве примера, если водитель не увеличивает расстояние следования за впереди идущим транспортным средством после активации тактильной педали газа, тогда предустановленное расстояние следования, которое используется для приведения в действие тактильной педали, может быть уменьшено, чтобы не создавать помехи водителю. Предустановленные пороговые значения, связанные со временем до столкновения и промежутком времени, могут быть уменьшены подобным образом. Тем не менее, может быть установлено минимальное значение, при достижении которого пороговое значение не будет уменьшаться.
Как может быть понятно среднему специалисту в данной области, представленные здесь алгоритмы, могут быть переданы устройству обработки, которое может включать в себя любой существующий электронный блок управления или специализированный электронный блок управления, представленному в различных формах, включая, но не ограничиваясь, информацией, постоянно хранящейся на неперезаписываемых носителях данных, как устройства ROM, и изменяющейся информацией, хранящейся на перезаписываемых носителях данных, таких как дискета, магнитная лента, CD, устройства RAM и другие магнитные и оптические носители данных. Алгоритмы также могут использоваться исполняемыми программными объектами. В альтернативных вариантах осуществления алгоритмы могут быть реализованы целиком или частично с использованием подходящих аппаратных компонентов, таких как прикладные интегральные микросхемы (ASIC), конечные автоматы, приборы управления, или с использованием других аппаратных компонентов или устройств, или комбинации аппаратных, программных и встроенных аппаратно-программных компонентов.
В то время как были проиллюстрированы и описаны различные варианты исполнения изобретения, данные варианты исполнения не направлены на описание и иллюстрирование всех возможных форм изобретения. Термины, использованные в описании изобретения, представляют собой средство описания, а не ограничения, при этом подразумевается возможность проведения разнообразных изменений без отступления от общего направления и объема изобретения.
Изобретение относится к области управления транспортным средством. Транспортное средство содержит систему идентификации водителя, выполненную с возможностью получать информацию о водителе транспортного средства от чипа идентификации, считывателя чипов, брелока для ключей или пластиковой карты (144), находящихся вблизи транспортного средства, и классифицировать водителя на основании данной информации. Система датчиков, расположенных в транспортном средстве, выполнена с возможностью измерения множества параметров, определяющих текущий режим управления транспортным средством и предел управляемости транспортным средством. Контроллер, соединенный с системой идентификации водителя, выполнен с возможностью определять степень различия между текущим режимом управления транспортным средством и пределом управляемости и записывать историю изменений значений указанной разницы для водителя, относящегося к определенной категории. Достигается повышение безопасности. 4 н. и 16 з.п. ф-лы, 23 ил.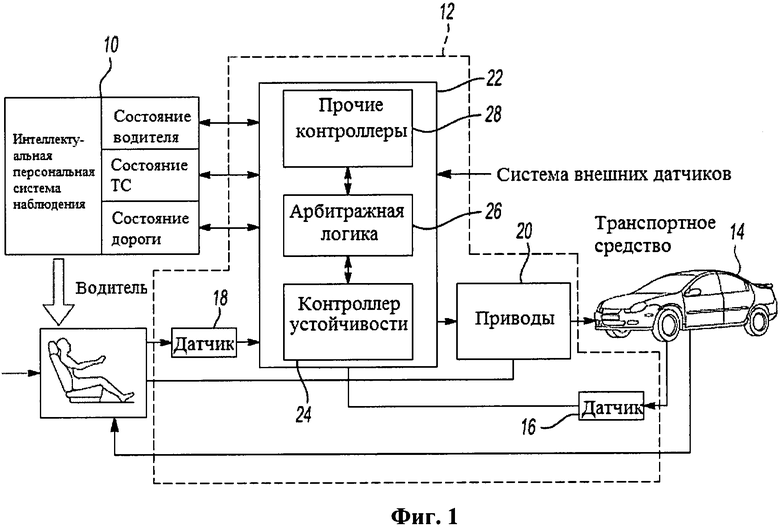
1. Транспортное средство, содержащее:
систему идентификации водителя, расположенную в транспортном средстве и выполненную с возможностью получать информацию о водителе транспортного средства от устройства идентификации, находящегося вблизи транспортного средства, и классифицировать водителя на основании данной информации;
систему датчиков, расположенных в транспортном средстве и выполненных с возможностью измерения множества параметров, определяющих текущий режим управления транспортным средством и предел управляемости транспортным средством; и
по меньшей мере один контроллер, соединенный с системой идентификации водителя и системой датчиков и выполненный с возможностью определять степень различия между текущим режимом управления транспортным средством и пределом управляемости и записывать историю изменений значений указанной разницы для водителя относящегося к определенной категории.
2. Транспортное средство по п. 1, в котором по меньшей мере один контроллер дополнительно выполнен с возможностью характеризовать динамику управления транспортным средством водителем на основании указанной степени различия и записывать историю изменения во времени полученной характеристики.
3. Транспортное средство по п. 2, в котором характеристика динамики управления транспортным средством водителем на основании указанной степени различия включает в себя определение промежутка времени, в течение которого степень различия попадает в заранее заданный диапазон, и записывание истории изменения во времени промежутка времени, в течение которого степень различия попадает в заданный диапазон.
4. Транспортное средство по п. 1, дополнительно содержащее интерфейс, выполненный с возможностью предоставления доступа к записанной истории изменения во времени указанной степени различия.
5. Транспортное средство по п. 1, в котором система идентификации водителя выполнена с возможностью получения информации от по меньшей мере одного радиочастотного чипа идентификации и сотового телефона.
6. Транспортное средство, содержащее:
систему идентификации водителя, расположенную в транспортном средстве и выполненную с возможностью получать информацию о водителе транспортного средства от устройства идентификации, находящегося вблизи транспортного средства, и классифицировать водителя на основании данной информации; и
по меньшей мере один контроллер, соединенный с системой идентификации водителя и выполненный с возможностью устанавливать категории поведения водителя на основании истории запросов крутящего момента водителем и соответственных степеней их изменения, отнесения текущего поведения водителя к одной из установленных категорий на основании текущих запросов крутящего момента водителем и соответственных степеней их изменения, а также записывать историю присвоения категории, если водитель относится к определенной категории.
7. Транспортное средство по п. 6, дополнительно содержащее интерфейс, выполненный с возможностью предоставления доступа к записанной истории присвоения категории.
8. Транспортное средство по п. 6, в котором система идентификации водителя выполнена с возможностью получения информации от по меньшей мере одного радиочастотного чипа идентификации и сотового телефона.
9. Транспортное средство по п. 6, в котором установление категорий поведения водителя на основании истории запросов крутящего момента водителем и соответственных степеней их изменения включают в себя определение пороговых значений категории на основании среднего значения и стандартного отклонения истории запросов крутящего момента водителем и соответственных степеней их изменения.
10. Транспортное средство, содержащее:
педаль газа, имеющую определенное положение;
педаль тормоза, имеющую определенное положение;
систему идентификации водителя, расположенную в транспортном средстве и выполненную с возможностью получать информацию о водителе транспортного средства от устройства идентификации, находящегося вблизи транспортного средства, и классифицировать водителя на основании данной информации; и
по меньшей мере один контроллер, выполненный с возможностью определять промежуток времени между транспортным средством и другим транспортным средством, определять степень изменения по меньшей мере одного положения педали газа и/или педали тормоза, составления характеристики продольного управления водителем транспортным средством на основании промежутка времени и изменчивости степени изменения, а также записывать историю составления характеристик, если водитель относится к определенной категории.
11. Транспортное средство по п. 10, дополнительно содержащее переднюю систему датчиков, выполненную с возможностью определения расстояния между транспортными средствами.
12. Транспортное средство по п.11, в котором определение промежутка времени между транспортным средством и другим транспортным средством основано на расстоянии между транспортными средствами и скоростью транспортного средства.
13. Транспортное средство по п.10, в котором характеристика продольного управления водителем транспортным средством на основании промежутка времени и изменчивости степени изменения включает в себя формирование коэффициента водителя посредством оценки классификаций промежутка времени и изменчивости степени изменения на основе правила.
14. Транспортное средство по п.13, в котором значение коэффициента водителя характеризует тип продольного управления транспортным средством.
15. Транспортное средство по п.10, дополнительно содержащее интерфейс, выполненный с возможностью предоставления доступа к записанной истории изменения во времени полученной характеристики.
16. Транспортное средство по п.10, в котором система идентификации водителя выполнена с возможностью получения информации от по меньшей мере одного радиочастотного чипа идентификации и мобильного телефона.
17. Транспортное средство, содержащее:
систему идентификации водителя, расположенную в транспортном средстве и выполненную с возможностью получать информацию о водителе транспортного средства от устройства идентификации, находящегося вблизи транспортного средства, и классифицировать водителя на основании данной информации; и
по меньшей мере один контроллер, соединенный с системой идентификации водителя и выполненный с возможностью составления характеристики продольного управления транспортным средством водителем на основании расстояния и относительной скорости между транспортным средством и другим транспортным средством и продольного ускорения транспортного средства, а также записывать историю составления характеристик, если водитель относится к определенной категории.
18. Транспортное средство по п.17, дополнительно содержащее интерфейс, выполненный с возможностью предоставления доступа к записанной истории изменения во времени полученной характеристики.
19. Транспортное средство по п.17, в котором система идентификации водителя выполнена с возможностью получения информации от по меньшей мере одного радиочастотного чипа идентификации и мобильного телефона.
20. Транспортное средство по п.17, в котором характеристика продольного управления водителем транспортным средством на основании расстояния и относительной скорости между транспортными средствами и продольного ускорения транспортного средства включает в себя определение времени реакции водителя на изменения расстояния между транспортными средствами.

