УРОВЕНЬ ТЕХНИКИ
Сонливость водителя представляет собой угрозы для безопасности дорожного движения. Различные механизмы использовались ранее, чтобы пробовать выявлять сонливость водителя. Например, камеры во внутренней части транспортного средства могут использоваться для контроля глаз водителя, после чего, может определяться процент времени, когда глаза водителя закрыты. Когда глаза водителя закрыты в течение некоторого процента времени в пределах заданного периода времени, более высокого, чем предопределенное пороговое значение, может быть определена сонливость водителя. Однако, использование внутренних камер для контроля глаз водителя может быть ненадежным, и более того, повышает себестоимость транспортного средства и сложность производства, требуя датчика внутри кабины, которому, в ином случае, не требовалось бы быть включенным в транспортное средство.
Еще один современный механизм для попытки выявлять сонливость водителя включает в себя использование камер, внешних по отношению к транспортному средству, для определения является ли стереотип вождения несовместимым с дорожными условиями, например, отклоняется ли водитель вправо и за пределы полосы движения. Однако, внешние камеры, необходимые для получения информации о дороге, могут не быть надежными, в особенности, когда плохи дорожные условия, сильная непогода, и т.д. Кроме того, как при использовании внутренних камер, использование внешних камер и/или других типов датчиков для определения положения транспортного средства относительно проезжей части дороги может увеличивать затраты, вес и сложность производства у транспортного средства.
Короче говоря, настоящие механизмы для выявления сонливости водителя могут страдать от недостатков, например, связанных с ненадежностью, специально необходимыми датчиками, и т.д.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩЕСТВА ИЗОБРЕТЕНИЯ
Согласно одному аспекту изобретения предложена система для обнаружения опасного вождения, содержащая компьютер на транспортном средстве, причем компьютер содержит процессор и память, при этом, компьютер выполнен с возможностью: собирать данные, связанные со скоростью рыскания транспортного средства, в течение некоторого периода времени; вычислять, частично на основании данных скорости рыскания, реальную траекторию и идеальную траекторию для транспортного средства за упомянутый период времени; определять отклонение скорости рыскания, связанной с реальной траекторией, от скорости рыскания, связанной с идеальной траекторией; рассчитывать дисперсию отклонения; и выдавать указание состояния опасного вождения, если дисперсия превышает предопределенное пороговое значение дисперсии.
Согласно одному варианту осуществления системы состояние опасного вождения является состоянием сонливости.
Согласно другому варианту осуществления системы идеальная траектория вычисляется частично на основании данных скорости для транспортного средства за упомянутый период времени.
Согласно другому варианту осуществления системы идеальная траектория вычисляется на основании эталонной модели водителя.
Согласно другому варианту осуществления системы эталонная модель водителя является оптимальной моделью водителя предварительного представления.
Согласно другому варианту осуществления системы компьютер дополнительно выполнен с возможностью осуществлять полосовую фильтрацию отклонения перед расчетом дисперсии.
Согласно другому варианту осуществления системы полосовой фильтр конфигурируется согласно анализу спектральной плотности мощности отклонений скорости рыскания.
Согласно другому варианту осуществления системы компьютер дополнительно выполнен с возможностью давать положительное приращение счетчику, если дисперсия превышает предопределенное пороговое значение дисперсии, при этом, указание состояния опасного вождения выдается, только если счетчик превышает предопределенное пороговое значение счетчика.
Согласно второму аспекту изобретения предложен способ обнаружения опасного вождения, содержащий этапы, на которых: собирают данные, связанные со скоростью рыскания транспортного средства, в течение некоторого периода времени; вычисляют, частично на основании данных скорости рыскания, реальную траекторию и идеальную траекторию для транспортного средства за упомянутый период времени; определяют отклонение скорости рыскания, связанной с реальной траекторией, от скорости рыскания, связанной с идеальной траекторией; рассчитывают дисперсию отклонения; и выдают указание состояния опасного вождения, если дисперсия превышает предопределенное пороговое значение дисперсии.
Согласно одному варианту осуществления способа состояние опасного вождения является состоянием сонливости.
Согласно другому варианту осуществления способа идеальная траектория вычисляется частично на основании данных скорости для транспортного средства за упомянутый период времени.
Согласно другому варианту осуществления способа идеальная траектория вычисляется на основании эталонной модели водителя.
Согласно другому варианту осуществления способа эталонная модель водителя является оптимальной моделью водителя предварительного представления.
Согласно другому варианту осуществления способа компьютер дополнительно выполнен с возможностью осуществлять полосовую фильтрацию отклонения перед расчетом дисперсии.
Согласно другому варианту осуществления способа полосовой фильтр конфигурируется согласно анализу спектральной плотности мощности отклонений скорости рыскания.
Согласно другому варианту осуществления способ дополнительно содержит этап, на котором дают положительное приращение счетчику, если дисперсия превышает предопределенное пороговое значение дисперсии, при этом, указание состояния опасного вождения выдается, только если счетчик превышает предопределенное пороговое значение счетчика.
Согласно третьему аспекту изобретения предложен компьютер транспортного средства, содержащий в себе команды, чтобы: собирать данные, связанные со скоростью рыскания транспортного средства, в течение некоторого периода времени; вычислять, частично на основании данных скорости рыскания, реальную траекторию и идеальную траекторию для транспортного средства за упомянутый период времени; определять отклонение скорости рыскания, связанной с реальной траекторией, от скорости рыскания, связанной с идеальной траекторией; рассчитывать дисперсию отклонения; и выдавать указание состояния опасного вождения, если дисперсия превышает предопределенное пороговое значение дисперсии.
Согласно одному варианту осуществления компьютера идеальная траектория вычисляется на основании эталонной модели водителя.
Согласно другому варианту осуществления компьютера команды дополнительно включают в себя команды для полосовой фильтрации отклонения перед расчетом дисперсии.
Согласно другому варианту осуществления компьютера полосовой фильтр конфигурируется согласно анализу спектральной плотности мощности отклонений скорости рыскания.
ЧЕРТЕЖИ
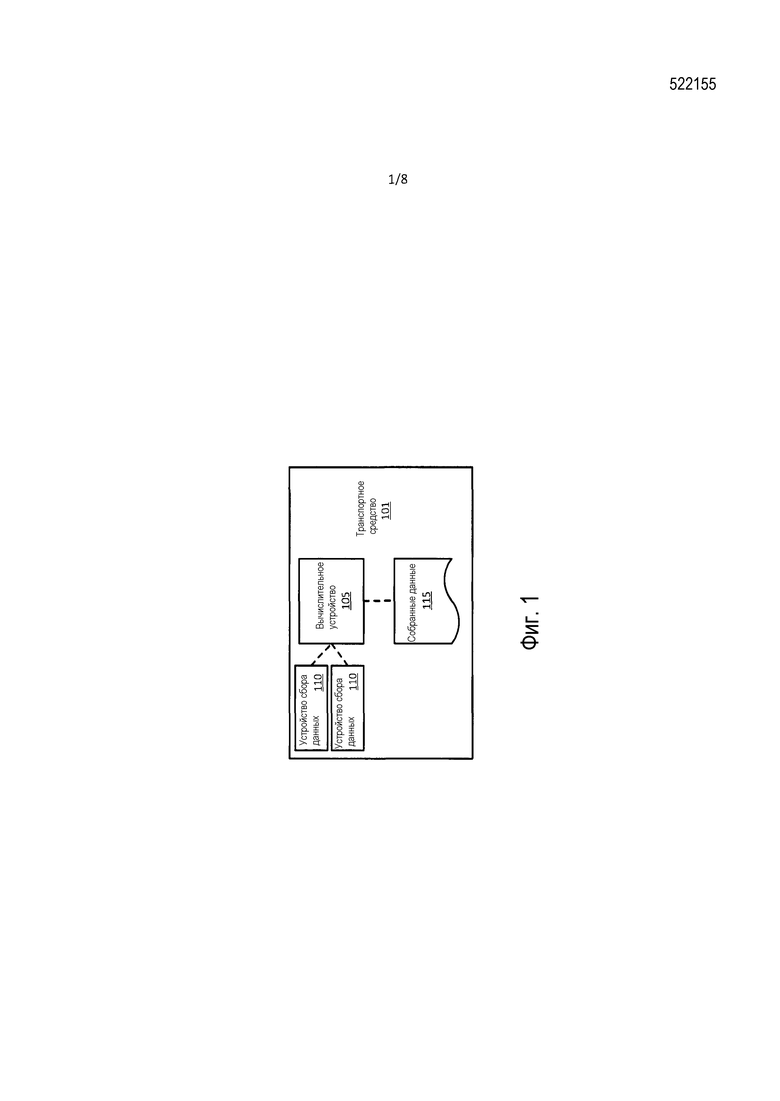
Фиг. 1 - структурная схема системы транспортного средства для выявления сонливости водителя.
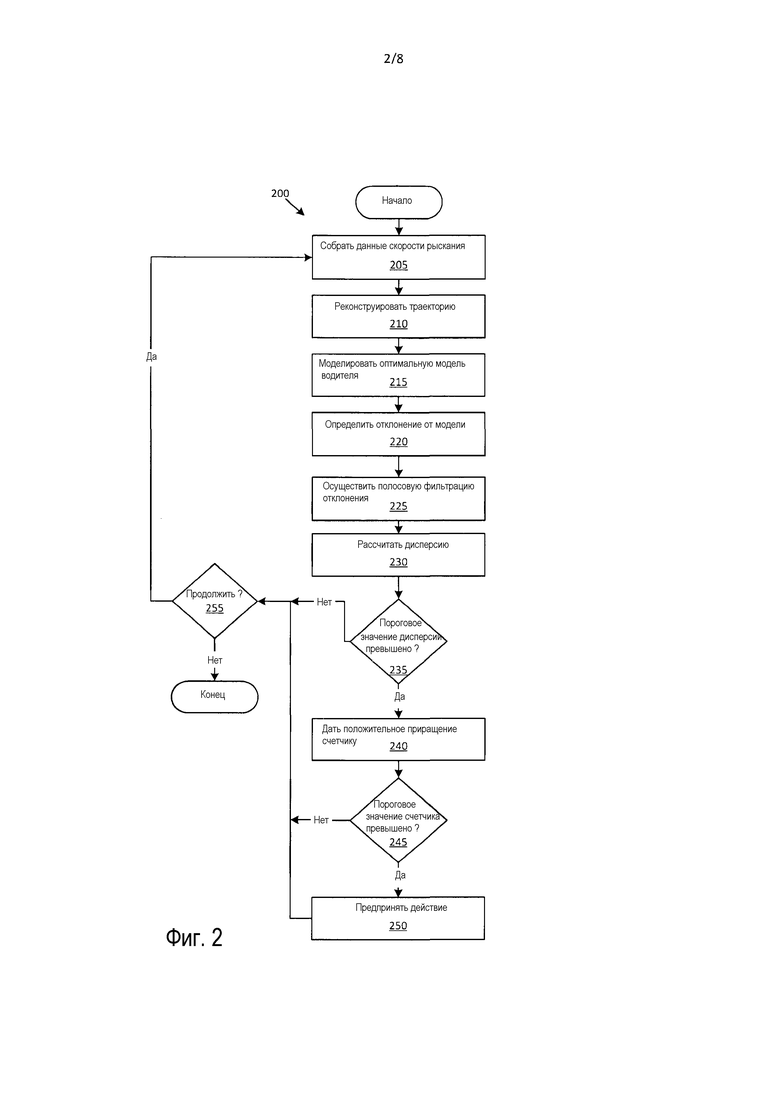
Фиг. 2 - схема примерной последовательности операций для выявления сонливости водителя.
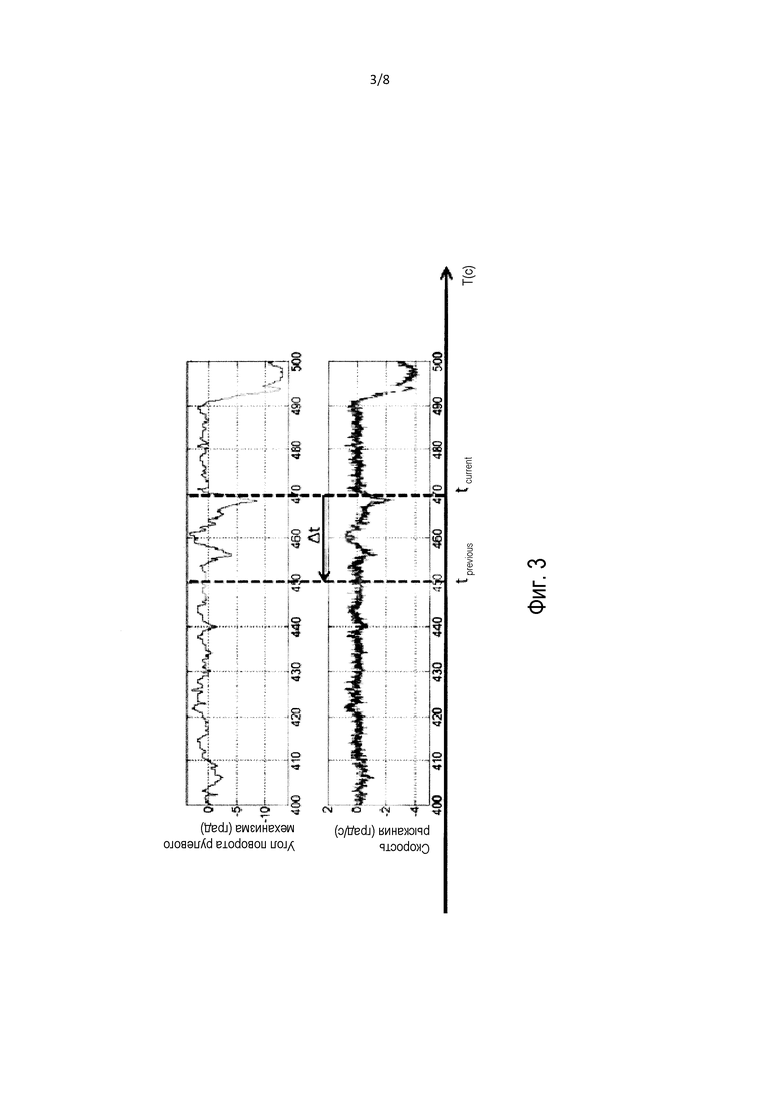
Фиг. 3 иллюстрирует примерные графики данных транспортного средства, в том числе, данных скорости рыскания, которые могут использоваться для реконструкции траектории транспортного средства.
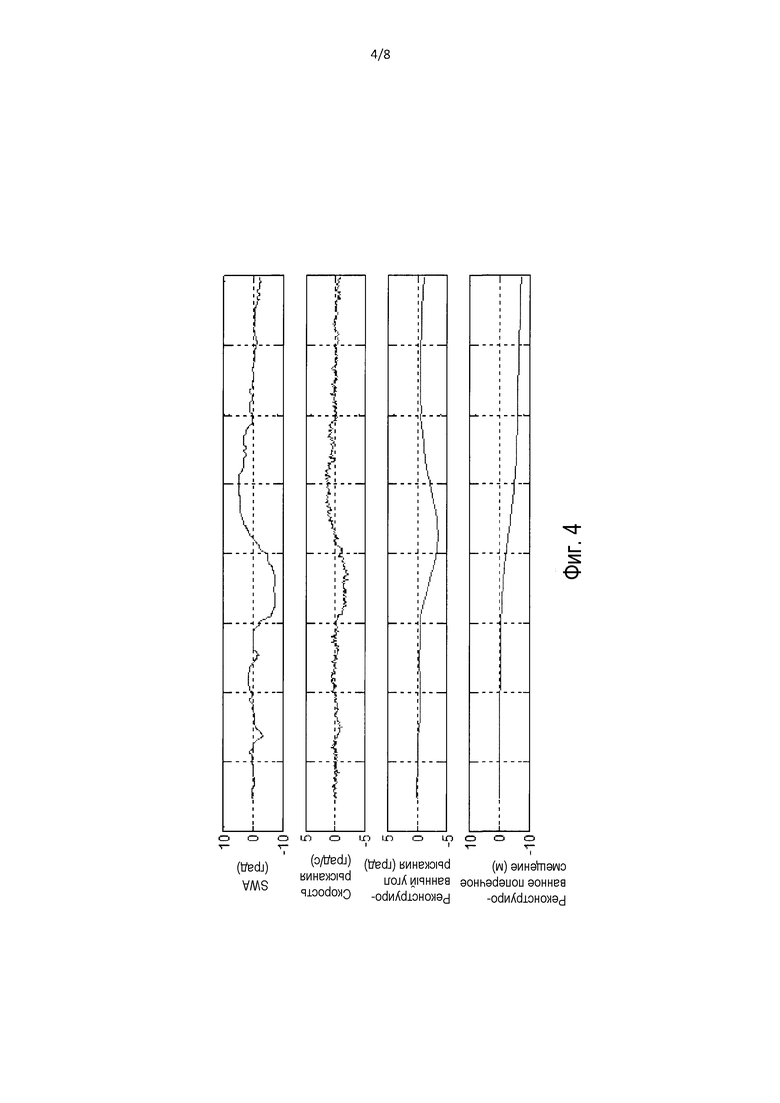
Фиг. 4 иллюстрирует примерные графики реконструкции траектории изменения полосы движения транспортного средства.
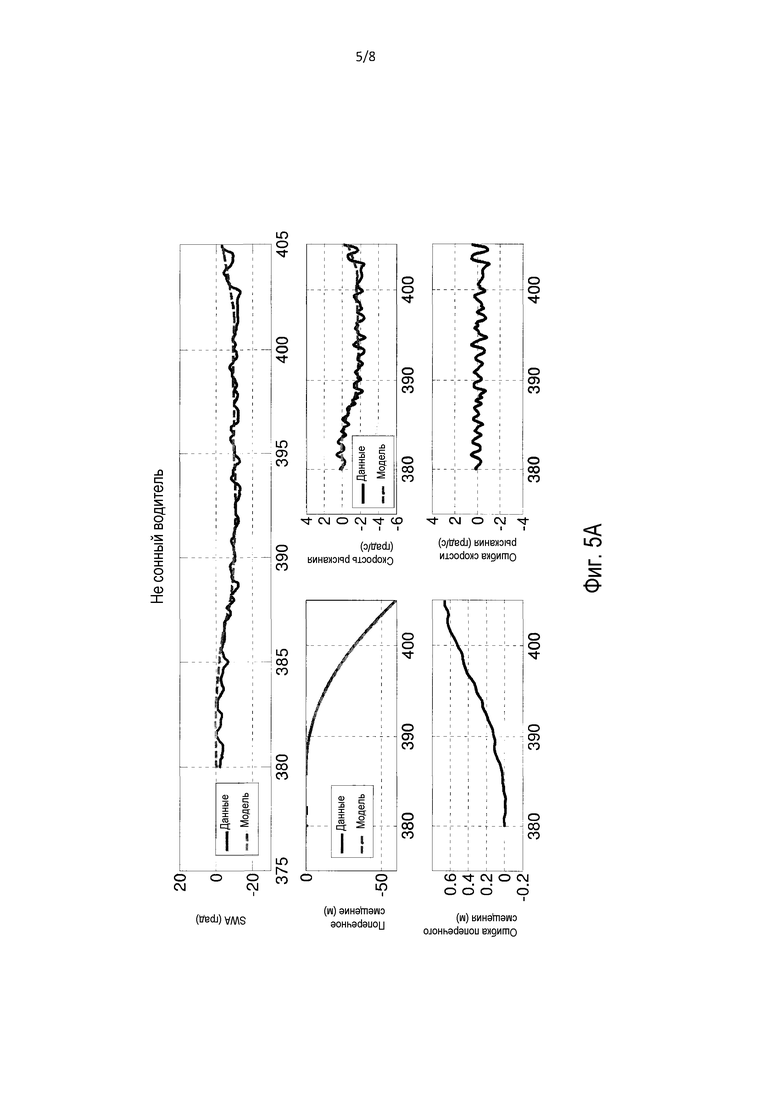
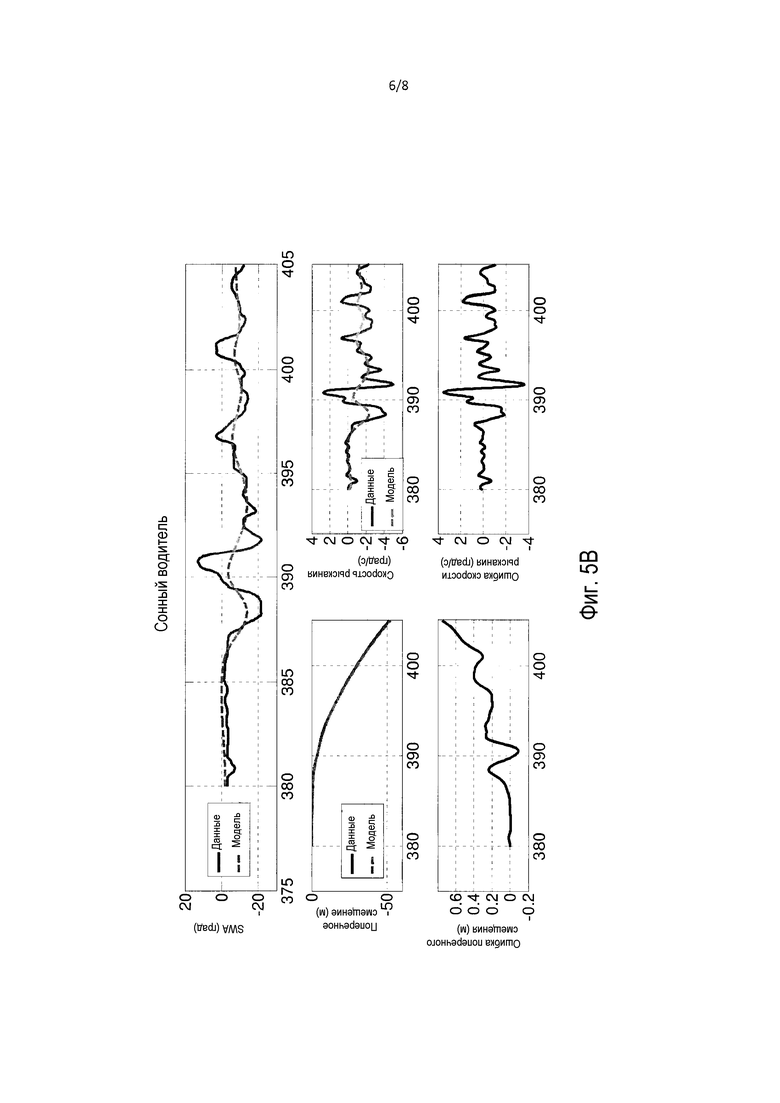
Фиг. 5A и 5B иллюстрируют примерные графики имитационного моделирования по траектории, определенной моделью водителя, и по поведению человека-водителя, соответственно.
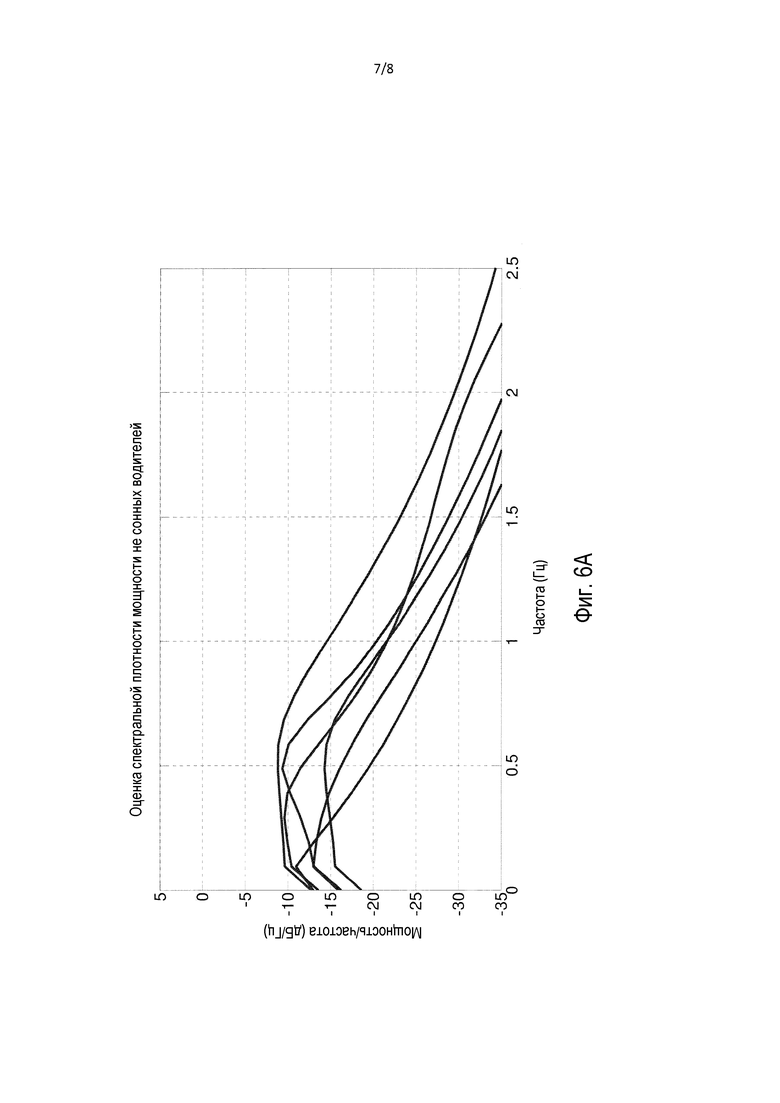
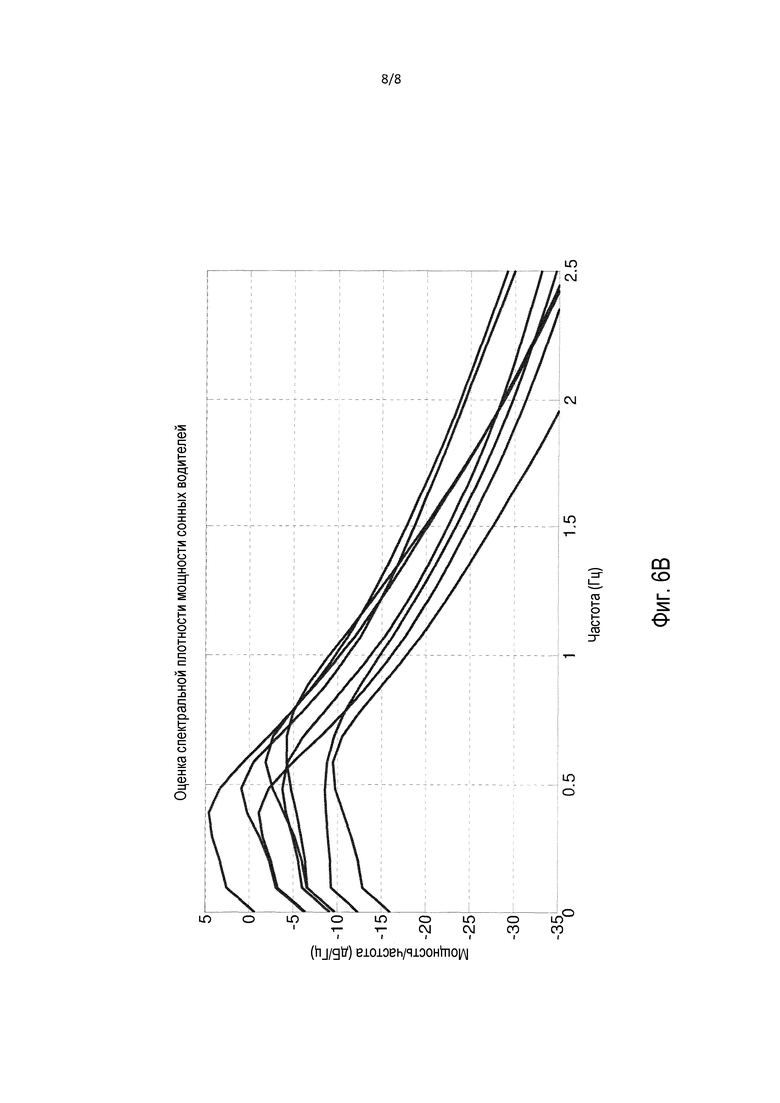
Фиг. 6A и 6B иллюстрируют примерные графики анализа спектральной плотности мощности данных скорости рыскания для не сонного и сонного водителя, соответственно.
ПОДРОБНОЕ ОПИСАНИЕ
ОБЗОР СИСТЕМЫ
Фиг. 1 - структурная схема системы транспортного средства 101 для выявления сонливости водителя. Транспортное средство 101 включает в себя вычислительное устройство 105, которое присоединено с возможностью связи к одному или более устройств 110 сбора данных, например, датчиков, или тому подобного, таких как известные для сбора данных 115, относящихся к скорости рыскания транспортного средства 101 и/или других данных, как обсуждено в материалах настоящей заявки. Компьютер 105 дополнительно выполнен с возможностью использовать данные 115 рыскания.
Механизмы для определения состояния сонливости водителя подробнее описаны ниже; вообще, данные 115 могут использоваться для реконструкции последней траектории транспортного средства на дороге и могут сравниваться с идеальной траекторией, вычисленной согласно известной эталонной моделью водителя, такой как модель Мак-Адама. Сравнение фактического поведения водителя с имитационным моделированием, являющимся результатом модели водителя, устраняет или уменьшает степень, с которой дорожные условия, например, изгибы, неровности, и т.д., вызвали поведение водителя, например, проявились в скоростях рыскания, которые, иначе, интерпретировалась бы в качестве происходящих от сонливости. Специфичная частотная составляющая скорости рыскания, связанная с сонливостью может идентифицироваться и оцениваться для идентификации стереотипа вождения, ассоциативно связанного с сонливостью.
Компьютер 105 дополнительно может быть выполнен с возможностью предпринимать действие, например, выдавать предупреждение, или тому подобное, и/или выполнять некоторое управление транспортным средством 101, например, замедляя или устанавливая транспортное средство 101, по определению, что была выявлена сонливость водителя. Соответственно, сонливость водителя может количественно определяться и идентифицироваться без использования датчиков, иных чем устройства 110 сбора данных скорости рыскания, как правило, уже размещенные в транспортном средстве 110, и без дополнительной информации о дороге, которая требовала бы дополнительных данных 115 и/или датчиков 110.
ПРИМЕРНЫЕ ЭЛЕМЕНТЫ СИСТЕМЫ
Транспортное средство 101, как правило, является наземным транспортным средством, передвигающимся на двух или более колесах, например, пассажирским автомобилем или тому подобным. Центральный компьютер 105, например, включенный в транспортное средство 101, в целом включает в себя процессор и память, память включает в себя одну или более форм машинно-читаемых носителей, в целом включающих в себя энергозависимую и энергонезависимую память, и хранящих инструкции, выполняемые процессором для выполнения различных операций, в том числе, как раскрытые в материалах настоящей заявки. Память компьютера 105, как правило, дополнительно хранит команды, исполняемые процессором компьютера 105, для выполнения последовательностей операций, раскрытых в материалах настоящей заявки, например, приема и оценивания данных из устройств 110 сбора данных, принятия решения в отношении сонливости водителя, и т.д.
Компьютер 105 в целом выполнен с возможностью поддержания связи по шине локальной сети контроллеров (CAN) или тому подобному. В дополнение, компьютер 105 может быть выполнен с возможностью для поддержания связи с одним или более устройств 150, например, с помощью различных проводных и/или беспроводных сетевых технологий, таких как Bluetooth, универсальная последовательная шина (USB) или кабель micro-USB, и т.д. Кроме того, компьютер 105 может включать в себя или может быть присоединен к человеко-машинному интерфейсу (HMI), который может принимать входной сигнал, выдаваемый в компьютер 105, и отображать выходной сигнал. HMI может включать в себя многообразие механизмов, например, устройство ввода, такое как сенсорный экран, клавиатуру, кнопочную панель, микрофон, и т.д., а кроме того, как правило включает в себя механизмы вывода, такие как дисплейный экран, громкоговорители, и т.д.
Устройства 110 сбора данных могут включать в себя многообразие устройств, в том числе, датчиков, или тому подобного, например, использующих гироскопы, обычно размещенные в существующих транспортных средствах 101, для выявления скорости рыскания и/или других данных 115. Кроме того, различные контроллеры в транспортном средстве могут работать в качестве устройств 110 сбора данных, чтобы выдавать данные 115 через шину CAN, например, данные 115, относящиеся к скорости, ускорению транспортного средства, и т.д. Кроме того еще, датчики или тому подобное, оборудование глобальной системы определения местоположения (GPS), и т.д., могли бы быть включены в транспортное средство и сконфигурированы в качестве устройств 110 сбора данных, чтобы выдавать данные непосредственно в компьютер 105, например, через проводное или беспроводное соединение. Устройства 110 сбора данных с датчиками могли бы включать в себя механизмы для выявления положения, изменения положения, скорости изменения положения, и т.д., компонентов транспортного средства 101, таких как рулевое колесо, тормозная педаль, акселератор, рычаг переключения передач, и т.д.
Память компьютера 105, как правило, хранит собранные данные 115. Собранные данные 115 могут включать в себя многообразие данных, собранных в транспортном средстве 101. Примеры собранных данных 115 приведены выше, а более того, данные 115 обычно собираются с использованием одного или более устройств 110 сбора данных и дополнительно могут включать в себя данные, рассчитанные из них в компьютере 105.
ПРИМЕРНЫЕ ПОСЛЕДОВАТЕЛЬНОСТИ ОПЕРАЦИЙ
Фиг. 2 - схема примерной последовательности 200 операций для выявления сонливости водителя. Последовательность 200 операций начинается на этапе 205, на которой компьютер 105 транспортного средства 101 собирает данные 115, в том числе, скорость рыскания транспортного средства 101, за период времени, например, последние 10 секунд, последние 20 секунд, последние 30 секунд, и т.д.
Затем, на этапе 210, компьютер 105 реконструирует траекторию транспортного средства 101 за период времени. Эта реконструкция выполняется посредство интегрирования скорости рыскания транспортного средства 101 за период времени для получения путевого угла транспортного средства, то есть, угла рыскания. Фиг. 3 иллюстрирует пример данных 115 транспортного средства 101, в том числе, данных 115 скорости рыскания, которые могут использоваться для реконструкции траектории транспортного средства. Отметим, что скорость рыскания, измеренная по датчику 110 транспортного средства 101, как правило, будет включать в себя шум и смещение. Такие погрешности измерения, в частности, смещение, могут портить точность вычисления путевого угла транспортного средства 101. Однако, так как, в настоящей заявке интервал интегрирования, то есть, Δt, имеет относительно короткую длительность, совокупное смещение может игнорироваться. Уравнение 1 иллюстрирует расчет путевого угла ψ(t), транспортного средства при данной скорости r рыскания в момент t времени.
 ,
, 
Затем, на основании дополнительного допущения отсутствия или по меньшей мере отсутствия значительной поперечной скорости транспортного средства 101, с использованием данных 115, идентифицирующих скорость транспортного средства 101 в момент t времени, в дополнение к путевому углу ψ(t) транспортного средства, рассчитанному в Уравнении 1, кинематические уравнения могут использоваться для реконструкции траектории транспортного средства 101, как проиллюстрировано следующим Уравнением 2.
Фиг. 4 иллюстрирует примерные графики реконструкции траектории изменения полосы движения транспортного средства. То есть, предоставлена реконструированная траектория, представляющая маневр или маневры, выполняемые в течение интервала Δt.
Затем, на этапе 215, эталонная модель водителя используется для расчета оптимального угла поворота рулевого механизма и для формирования оптимального направления, в котором транспортное средство 101 могло бы выполнять реконструированную траекторию, по этапу 210. (Вообще, эталонная модель водителя, как известно, может использоваться для определения оптимального поведения водителя, такого как оптимальные углы поворота рулевого механизма, оптимальные скорости, и т.д.) Реконструированная траектория сама по себе не обязательно полезна для предоставления надежного указателя сонливости водителя. Это происходит потому, что, как правило, также должна рассматриваться информация, относящаяся к дороге, проходимой транспортным средством 101 в течение интервала Δt. Например, повороты или боковые перемещения транспортного средства 101 могут интерпретироваться по-разному в тех случаях, когда дорога относительно прямая, в противоположность тем случаям, где дорога относительно крива или извилистая. Соответственно, модель водителя используется для отражения оптимального или идеального набора ходовых углов транспортного средства 101 для выполнения реконструированной траектории. В одной из реализаций, используется модель водителя Мак-Адама, как показано в Уравнении 3.
Модели водителя, в том числе, модель Мак-Адама, в целом известны для расчета оптимального ходового угла или угла uopt, поворота рулевого механизма транспортного средства 101, как показано в Уравнении 3. То есть, yd(t) представляет требуемую траекторию, такую как, будет очевидно, может быть выведена из Уравнения 2. Переменная x0 представляет собой начальное состояние транспортного средства 101. Матрицы F(t) и g(t) являются, соответственно, матрицами перехода между состояниями системы транспортного средства 101 и матрицами входных сигналов перехода между состояниями транспортного средства 101. T представляет горизонт предварительного представления.
Фиг. 5A и 5B соответственно показывают имитационное моделирование по траектории, определенной моделью водителя, и по поведению человека-водителя. Оптимальный, не сонный водитель (фиг. 5A) может управлять транспортным средством 101 некоторым образом, близким к указанному оптимальной моделью предварительного представления (например, Уравнением 3), то есть, с небольшими отклонениями скорости рыскания. Сонный водитель (фиг. 5B), с другой стороны, демонстрирует поведение чрезмерного рулевого управления по сравнению с эталонной моделью и большие отклонения скорости рыскания, указывающие сонливость водителя.
Вслед за этапом 215, на этапе 220, компьютер 105 определяет соответственные отклонения от идеальной скорости рыскания для набора скоростей рыскания, измеренных в соответственные моменты t времени. Это определение как правило выполняется посредством сравнения реального режима рулевого управления, отраженного в данных 115 скорости рыскания, с идеальным режимом рулевого управления, как указанный эталонной моделью водителя.
Затем, на этапе 225, компьютер 105 применяет полосовой фильтр к отклонениям скорости рыскания от идеальной, определенной, как описано со ссылкой на этап 215. Полосовой фильтр желателен, так как эмпирически определенные поведения сонных водителей отражаются измерениями скорости рыскания, имеющими значительные частотные составляющие. Анализ спектральной плотности мощности иллюстрирует воздействия сонливости на данные 115 скорости рыскания. Например, фиг. 6A дает примерный график анализа спектральной плотности мощности отклонений скорости рыскания для не сонного водителя, а фиг. 6B приводит примерный графический анализ спектральной плотности мощности отклонений скорости рыскания от идеальной, определенной эталонной моделью, для сонного водителя. Как может быть видно, для представленных показанных данных, поведения сонных водителей могут быть наиболее значимыми около 0,2-0,75 герц, то есть, отклонения от поведения не сонных водителей наиболее заметны. В любом случае, Уравнение 4 иллюстрирует полосовые фильтры верхних и нижних частот, такие как в целом известны, которые обычно могут использоваться для выделения данных 115, вероятно связанных с сонным поведением.
То есть, Уравнение 4a иллюстрирует фильтр нижних частот с входным сигналом x (отклонением скорости рыскания), постоянной alp времени фильтра нижних частот и прошедшим фильтр нижних частот выходным сигналом y. Уравнение 4b, в свою очередь, иллюстрирует фильтр верхних частот, использующий выходной сигнал y из Уравнения 4a, постоянную ahp времени фильтра верхних частот и прошедший фильтр верхних частот сигнал y’.
Затем, на этапе 230, компьютер 105 рассчитывает дисперсию для выходного прошедшего фильтр верхних частот выходного сигнала y’, определенного, как описано выше в отношении этапа 225. Например, что касается Уравнения 5, приведенного ниже, расчет нормальной дисперсии может выполняться для n экземпляров y’ при среднем значении μ от y’.
Затем, на этапе 235, компьютер 105 определяет, не превышает ли дисперсия, рассчитанная на этапе 230, предопределенное пороговое значение. Предопределенное пороговое значение как правило определяется посредством эмпирической проверки и калибровки в зависимости от платформы транспортного средства. Если дисперсия превышает предопределенное пороговое значение дисперсии, то вершина 240 блок-схемы выполняется следующей. Иначе, последовательность 200 операций переходит на этап 255.
На этапе 240, который может следовать за этапом 235, компьютер 105 дает положительное приращение счетчику, который является целочисленным типом данных, как правило, изначально установленным (или сброшенным) в ноль, и который используется для регистрации количества раз, которое пороговое значение дисперсии было превышено после того, как счетчик был установлен или сброшен. Например, в описываемой на данный момент реализации, счетчик регистрирует количество периодов времени, t, в течение которых было превышено пороговое значение дисперсии. Через предопределенный период времени, например, в одной из реализаций, шесть минут, счетчик сбрасывается.
Вслед за этапом 240, на этапе 245, компьютер 105 определяет, превышает ли счетчик, подвергнутый приращению на этапе 240, предопределенное пороговое значение. Как с предопределенным пороговым значением дисперсии по этапу 235, описанным выше, пороговое значение счетчика по этапу 240 может определяться посредством эмпирической проверки и калибровки, зависящей от платформы транспортного средства. Если пороговое значение счетчика превышено, то, этап 250 выполняется следующим. Иначе, последовательность 200 операций переходит на этап 255.
На этапе 250, который может следовать за этапом 245, компьютер 105 идентифицирует состояние опасного вождения, например, состояние сонливости, и, как правило, предпринимает действие на его основании. Например, компьютер 105 мог бы формировать одно или более предупреждений с помощью HMI, например, звуковое предупреждение, выдающее шум или сообщение водителю транспортного средства 101, визуальное предупреждение на экране HMI, и т.д. Кроме того, компьютер 105 мог бы быть выполнен с возможностью отправлять команды в один или более контроллеров в транспортном средстве 101, например, для настройки скорости транспортного средства 101, для рулевого управления транспортным средством 101 для безопасной остановки, и т.д. Вслед за этапом 255, последовательность 200 операций переходит на этап 255.
На этапе 255, который может следовать за любым из этапов 235, 245, 250, компьютер 105 определяет, должна ли продолжаться последовательность операций 200. Например, транспортное средство 101 могло бы выключаться, останавливаться или быть движущимся на скорости, недостаточной, чтобы собирались содержательные данные скорости рыскания. Соответственно, последовательность 200 операций может заканчиваться вслед за этапом 255. Однако, последовательность 200 операций также может продолжаться, возвращаясь на этап 205. Кроме того, на этапе 255, счетчик, обсужденный в отношении этапа 240, может сбрасываться или настраиваться, например, спустя период времени, как описано выше.
Отметим, что описанные на данный момент механизмы могли бы использоваться для идентификации состояний аномального вождения, иных чем сонливость, например, водителя, который находился в состоянии опьянения вследствие состояния здоровья, лекарственных препаратов или алкоголя, и т.д. Однако, что касается расстройств, иных чем сонливость, значения переменных в вышеприведенном анализе могли бы быть иными. Например, как было пояснено выше, анализ спектральной плотности мощности для поведения сонных водителей фокусируется в диапазоне около 0,2-0,75 герц. Диапазон был бы иным для других типов расстроенного поведения.
ЗАКЛЮЧЕНИЕ
Вычислительные устройства, такие как обсужденные в материалах настоящей заявки, каждое, как правило, включает в себя инструкции, исполняемые одним или более вычислительных устройств, такими как идентифицированные выше, и для выполнения вершин блок-схем или этапов последовательностей операций, описанных выше. Например, вершины блок-схем последовательностей операций, обсужденные выше, могут быть воплощены в качестве машинно-исполняемых инструкций.
Машинно-исполняемые инструкции могут компилироваться или интерпретироваться из компьютерных программ, созданных с использованием многообразия языков и/или технологий программирования, в том числе, но не в качестве ограничения, и в одиночку или в комбинации, JavaTM, C, C++, Visual Basic, Java Script, Perl, HTML, и т.д. Вообще, процессор (например, микропроцессор) принимает инструкции, например, из памяти, машинно-читаемого носителя, и т.д., и исполняет эти инструкции, тем самым, выполняя одну или более последовательностей операций, в том числе, одну или более из последовательностей операций, описанных в материалах настоящей заявки. Такие инструкции и другие данные могут храниться и передаваться с использованием многообразия машинно-читаемых носителей. Файл в вычислительном устройстве, как правило является совокупностью данных, хранимых на машинно-читаемом носителе, таком как запоминающий носитель, оперативное запоминающее устройство, и т.д.
Машинно-читаемый носитель включает в себя любой носитель, который принимает участие в предоставлении данных (например, инструкций), которые могут читаться компьютером. Такой носитель может принимать многие формы, в том числе, но не в качестве ограничения, энергонезависимые носители, энергозависимые носители, и т.д. Энергонезависимые носители, например, включают в себя оптические или магнитные диски и другую постоянную память. Энергозависимые носители включают в себя динамическое оперативное запоминающее устройство (DRAM), которое типично составляет основную память. Обычные формы машинно-читаемых носителей, например, включают в себя дискету, гибкий диск, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM, DVD, любой другой оптический носитель, перфокарты, бумажную ленту, любой другой физический носитель со схемой расположения отверстий, RAM, PROM, EPROM, FLASH-EEPROM, любые другие микросхему или картридж памяти, или любой другой носитель, с которого компьютер может осуществлять считывание.
На чертежах, одинаковые номера ссылок указывают идентичные элементы. Кроме того, некоторые или все из этих элементов могли бы быть изменены. Что касается сред, последовательностей операций, систем, способов, и т.д., описанных в материалах настоящей заявки, должно быть понятно, что, хотя этапы таких последовательностей операций, и т.д., были описаны в качестве происходящих согласно определенной упорядоченной последовательности, такие последовательности операций могли бы быть осуществлены на практике с описанными этапами, выполняемыми в порядке, ином, чем порядок, описанный в материалах настоящей заявки. Кроме того, должно быть понятно, что некоторые этапы могли бы выполняться одновременно, что могли бы быть добавлены другие этапы, или что некоторые этапы, описанные в материалах настоящей заявки, могли бы быть опущены. Другими словами, описания способов в материалах настоящей заявки предоставлены с целью иллюстрации некоторых вариантов осуществления и никоим образом не должны толковаться, с тем чтобы ограничивать заявленное изобретение.
Соответственно, должно быть понятно, что вышеприведенное описание подразумевается иллюстративным, а не ограничивающим. Многие варианты осуществления и применения, иные чем предоставленные примеры, были бы очевидны специалистам в материалах настоящей заявки по прочтению вышеприведенного описания. Объем изобретения не должен определяться со ссылкой на вышеприведенное описание, но взамен, должен определяться со ссылкой на прилагаемую формулу изобретения наряду с полным объемом эквивалентов, на которые дано право такой формуле изобретения. Ожидается и подразумевается, что будущие совершенствования будут происходить в областях техники, обсужденных в материалах настоящей заявки, и что раскрытые системы и способы будут заключены в таких будущих вариантах осуществления. Подводя итог вышесказанному, должно быть понятно, что изобретение является допускающим модификацию и изменение, и ограничено исключительно следующей формулой изобретения.
Все термины, используемые в формуле изобретения, подразумеваются обусловленными своими наиболее свободными расширительными толкованиями и своими обычными значениями в качестве понятных специалистам в данной области техники, если в материалах настоящей заявки не приведено явное указание на иное. В частности, использование форм единственного числа, «упомянутый», и т.д., должно читаться излагающим один или более из указанных элементов, если пункт формулы изобретения не передает явное ограничение иным.
Изобретение относится к автомобилестроению, в частности к системам и устройствам повышения активной безопасности транспортных средств. Система для обнаружения опасного вождения, установленная на транспортном средстве, включает в себя компьютер, причем компьютер имеет процессор и память. При этом компьютер выполнен с возможностью собирать данные, связанные со скоростью рыскания транспортного средства, в течение некоторого периода времени, вычислять реальную траекторию и идеальную траекторию для транспортного средства за упомянутый период времени, определять отклонение скорости рыскания, связанной с реальной траекторией, от скорости рыскания, связанной с идеальной траекторией, рассчитывать дисперсию отклонения и выдавать указание состояния опасного вождения, если дисперсия превышает предопределенное пороговое значение дисперсии. Достигается повышение безопасности управления транспортным средством. 3 н. и 17 з.п. ф-лы, 8 ил.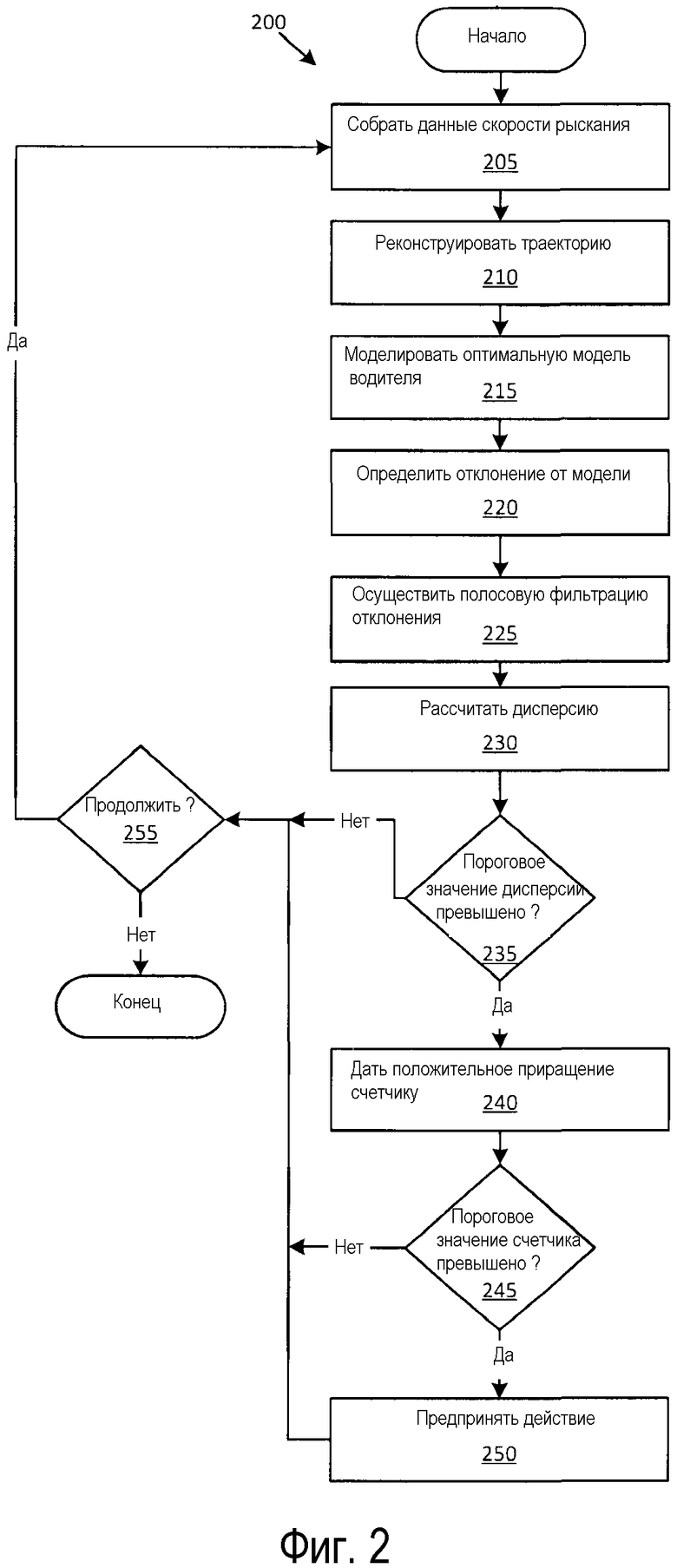
1. Система для обнаружения опасного вождения, содержащая компьютер на транспортном средстве, причем компьютер содержит процессор и память, при этом компьютер выполнен с возможностью:
собирать данные, связанные со скоростью рыскания транспортного средства, в течение некоторого периода времени;
вычислять, частично на основании данных скорости рыскания, реальную траекторию и идеальную траекторию для транспортного средства за упомянутый период времени;
определять отклонение скорости рыскания, связанной с реальной траекторией, от скорости рыскания, связанной с идеальной траекторией;
рассчитывать дисперсию отклонения и
выдавать указание состояния опасного вождения, если дисперсия превышает предопределенное пороговое значение дисперсии.
2. Система по п.1, в которой состояние опасного вождения является состоянием сонливости.
3. Система по п.1, в которой идеальная траектория вычисляется частично на основании данных скорости для транспортного средства за упомянутый период времени.
4. Система по п.1, в которой идеальная траектория вычисляется на основании эталонной модели водителя.
5. Система по п.4, в которой эталонная модель водителя является оптимальной моделью водителя предварительного представления.
6. Система по п.1, в которой компьютер дополнительно выполнен с возможностью осуществлять полосовую фильтрацию отклонения перед расчетом дисперсии.
7. Система по п.6, в которой полосовой фильтр конфигурируется согласно анализу спектральной плотности мощности отклонений скорости рыскания.
8. Система по п.1, в которой компьютер дополнительно выполнен с возможностью давать положительное приращение счетчику, если дисперсия превышает предопределенное пороговое значение дисперсии, при этом указание состояния опасного вождения выдается, только если счетчик превышает предопределенное пороговое значение счетчика.
9. Способ обнаружения опасного вождения, содержащий этапы, на которых:
собирают данные, связанные со скоростью рыскания транспортного средства, в течение некоторого периода времени;
вычисляют, частично на основании данных скорости рыскания, реальную траекторию и идеальную траекторию для транспортного средства за упомянутый период времени;
определяют отклонение скорости рыскания, связанной с реальной траекторией, от скорости рыскания, связанной с идеальной траекторией;
рассчитывают дисперсию отклонения и
выдают указание состояния опасного вождения, если дисперсия превышает предопределенное пороговое значение дисперсии.
10. Способ по п.9, в котором состояние опасного вождения является состоянием сонливости.
11. Способ по п.9, в котором идеальная траектория вычисляется частично на основании данных скорости для транспортного средства за упомянутый период времени.
12. Способ по п.9, в котором идеальная траектория вычисляется на основании эталонной модели водителя.
13. Способ по п.12, в котором эталонная модель водителя является оптимальной моделью водителя предварительного представления.
14. Способ по п.9, в котором компьютер дополнительно выполнен с возможностью осуществлять полосовую фильтрацию отклонения перед расчетом дисперсии.
15. Способ по п.14, в котором полосовой фильтр конфигурируется согласно анализу спектральной плотности мощности отклонений скорости рыскания.
16. Способ по п.9, дополнительно содержащий этап, на котором дают положительное приращение счетчику, если дисперсия превышает предопределенное пороговое значение дисперсии, при этом указание состояния опасного вождения выдается, только если счетчик превышает предопределенное пороговое значение счетчика.
17. Компьютер транспортного средства, содержащий в себе команды, чтобы:
собирать данные, связанные со скоростью рыскания транспортного средства, в течение некоторого периода времени;
вычислять, частично на основании данных скорости рыскания, реальную траекторию и идеальную траекторию для транспортного средства за упомянутый период времени;
определять отклонение скорости рыскания, связанной с реальной траекторией, от скорости рыскания, связанной с идеальной траекторией;
рассчитывать дисперсию отклонения и
выдавать указание состояния опасного вождения, если дисперсия превышает предопределенное пороговое значение дисперсии.
18. Компьютер по п.17, причем идеальная траектория вычисляется на основании эталонной модели водителя.
19. Компьютер по п.17, причем команды дополнительно включают в себя команды для полосовой фильтрации отклонения перед расчетом дисперсии.
20. Компьютер по п.19, причем полосовой фильтр конфигурируется согласно анализу спектральной плотности мощности отклонений скорости рыскания.
| СПОСОБ КОНТРОЛЯ И УПРАВЛЕНИЯ ФУНКЦИОНАЛЬНЫМ СОСТОЯНИЕМ ОПЕРАТОРА И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2417053C2 |
| US 2010109881 A1, 06.05.2010 | |||
| US 8260491 B2, 04.09.2012 | |||
| US 2013113910 A1, 09.05.2013. | |||

