Изобретение относится к автомобилестроению, в частности, к способам и устройствам активной безопасности транспортных средств, включая системы объективного контроля параметров движения автомобилей.
Известен способ, реализованный в системе управления транспортным средством, которая включает компьютер. Компьютер запрограммирован управлять применением одного из заданных значений крутящего момента рулевого управления и заданным результирующим значением асимметричного тормозного усилия. Каждое из заданных усилий выбирается для достижения заданного момента рыскания транспортного средства, который не превышает наименьшего из первого максимального момента рыскания в результате срабатывания системы рулевого управления и второго максимального момента рыскания в результате срабатывания тормозной системы, (см. патент США US 9925988 В1, заявители FORD GLOBAL TECH LLC и F-LORD GLOBAL TECHNOLOGIES, LLC, опубл. 27.03.2018).
Основным недостатком способа является достаточно большое количество используемых технических средств и их относительно высокая стоимость.
Известен способ управления транспортным средством, включающий определение заданного угла скольжения в плоскости движения, определение фактического угла скольжения в плоскости движения, а также угловой скорости рыскания по плоскости движения, и фактической угловой скорости в плоскости движения. Контроллер управляет системой автомобиля в соответствии с заданным углом скольжения, фактическим углом скольжения, заданной угловой скоростью рыскания и фактической угловой скоростью рыскания в плоскости движения, (см. патент США US 7885750 В2 INTEGRATED CONTROL SYSTEM FOR STABILITY CONTROL OF YAW, ROLL AND LATERAL MOTION OF A DRIVING VEHICLE USING AN INTEGRATED SENSING SYSTEM TO DETERMINE A SIDESLIP ANGLE», заявитель FORD GLOBAL TECHNOLOGIES, LLC, опубл. 08.02.2011).
Основным недостатком известного способа является сложное поэтапное сравнение контролируемых параметров, определяющих дрифт колес и других параметров движения автомобиля для достижения желаемого угла скольжения, а также отсутствие прогнозирования наступления опасных состояний с целью их предотвращения.
Известен способ контроля устойчивости движения транспортного средства, в котором давления в отдельных тормозных контурах транспортного средства задаются в зависимости от нескольких входных величин таким образом, чтобы устойчивость движения повышалась за счет торможения отдельными колесами. Для повышения устойчивости движения транспортного средства во время стабильных ходовых качеств определяется, существует ли с учетом резкого маневра рулем тенденция к последующим неустойчивым ходовым качествам, и в этом случае предварительное торможение будет происходить уже тогда, когда транспортное средство демонстрирует стабильные ходовые качества, (см. патент США №US 6957873 В2, заявители WANKE PETER, KUMMEL MARTIN, RAULFS HENNING, MAY ALEXANDER, опубл. 25.10.2005).
Основным недостатком известного способа является сложность конструкции системы раздельного управления тормозами, значительное количество используемых датчиков информации и отсутствие прогнозирования возникновения опасных состояний и предотвращения аварийных событий с учетом состояния дорожного покрытия.
Известен способ оказания помощи при вождении водителю автомобиля. Способ оказания помощи при вождении водителю автомобиля включает три этапа. Первый этап - отслеживание одного количественного показателя, выбранного из бокового скольжения транспортного средства, погрешности в скорости поворота по курсу, недостаточной поворачиваемости и количественных показателей, связанных с боковым скольжением транспортного средства, погрешности в скорости поворота по курсу или недостаточной поворачиваемости. Второй этап - определение наличия опасности возникновения потери устойчивости транспортного средства в случае, если любой из отслеживаемых количественных показателей или количественных показателей, выведенных из одного или более отслеживаемых количественных показателей, превышает заданное первое пороговое значение. При этом второй этап включает нормализацию отслеживаемых количественных показателей относительно эталонного значения и выведение количественного показателя для сопоставления с первым пороговым значением из двух из нормализованных количественных показателей. Третий этап - в случае определения наличия опасности подачи предупредительного сигнала, (см. патент РФ RU 2504491 С2 «Способ оказания помощи при вождении водителю автомобиля в условиях, близких к пределу устойчивости» заявитель ДЖИ ЭМ ГЛОУБАЛ ТЕКНОЛОДЖИ ОПЕРЕЙШНЗ, ИНК., опубл. 29.08.2000),
Основным недостатками способа являются сложность многоэтапного анализа и отсутствие прогнозирования опасных состояний и их предотвращения.
Известен способ, предусмотренный для управления транспортным средством и соответствующая система управления. Способ включает в себя прием данных, относящихся к событию скольжения колес, и этап определения прогнозируемой скорости рыскания транспортного средства в зависимости от данных, относящихся к событию скольжения колес. Это обычно включает в себя этап сравнения продольного скольжения заднего колеса с пороговым значением. Способ дополнительно содержит сравнение прогнозируемой скорости рыскания транспортного средства с требуемой скоростью рыскания и управление тормозным моментом, применяемым тормозным механизмом, по меньшей мере, к одному колесу транспортного средства в зависимости от прогнозируемой скорости рыскания транспортного средства. Изобретение рассматривает возможные ситуации, такие как недостаточная поворачиваемость, избыточная поворачиваемость или занос вследствие неисправности силовой установки и может помочь контролировать стабильность в течение короткого периода времени, (см. патент Великобритании GB 2545463 А заявитель JAGUAR LAND ROVER LTD, опубл. 21.06.2017),
Основными недостатками способа являются опасность автоматического управления курсом автомобиля за счет рулевого колеса в условиях отсутствия информации об окружающих объектах на полосе движения, а также отсутствие прогнозирования скорости центра масс и граничных скоростей возникновения опасных состояний и их предотвращение.
Наиболее близким по технической сущности является способ предотвращения столкновений автомобиля с препятствиями и система для его осуществления. (Патент РФ RU 2335805 С1, заявители Бузников Сергей Евгеньевич, Елкин Дмитрий Сергеевич, опубл. 10.10.2008).
Недостатком данного способа является недостаточно широкий вектор измеряемых координат состояния автомобиля, и в частности, угловой скорости сноса и заноса колес.
Техническая задача, на решение которой направлено предполагаемое изобретение, состоит в косвенных измерениях параметров движения колес, прогнозировании и предотвращении сноса и заноса колес автомобиля.
Поставленная техническая задача решается тем, что в способе предотвращения сноса и заноса колес автомобиля, при котором регистрируют и обрабатывают сигналы, формируемые импульсными датчиками частот вращения колес автомобиля, и передают их через блок сопряжения в блок обработки информации, в котором определяют значения физических переменных, формируют оценки скорости центра масс; угла поворота управляемых колес автомобиля и настроечных параметров с помощью микроконтроллера с программным обеспечением и сравнивают их с граничными значениями, характеризующими критическое состояние автомобиля и формируют на выходе блока обработки информации управляющие сигналы, передаваемые на устройства управления акселератором и/или тормозной системой и устройство индикации включения торможения, причем в блоке обработки информации в реальном времени формируют оценки прогнозируемых скорости центра масс, угла поворота управляемых колес автомобиля, топовых значений коэффициентов трения скольжения колес и граничных значений скоростей заноса и сноса колес на основании математической обработки сигналов о частотах вращения колес и настроечных параметров с помощью микроконтроллера с программным обеспечением, прогнозирование возникновения сноса или заноса колес (Δωm≠0) автомобиля выполняют путем экстраполяции граничных скоростей сноса колес Vгр1, заноса колес Vгр2, и скорости центра масс Vm на время τэ и, в случае превышения прогнозируемой скорости центра масс Vmэ минимальной из прогнозируемых граничных скоростей сноса Vгр1э и заноса Vгр2э колес, формируют управляющие воздействия на устройства управления акселератором и/или тормозной системой для автоматического предотвращения сноса или заноса колес автомобиля и на устройство индикации включения торможения для передачи водителю информации о включении автоматического режима предотвращения сноса и/или заноса колес автомобиля и предотвращения предпосылок к дорожно транспортным происшествиям ДТП.
Для реализации способа согласно предложенному изобретению может быть использована система предотвращения сноса и заноса колес автомобиля, для чего в автомобиле устанавливается система выявления предпосылок ДТП, путем предотвращения сноса и заноса колес автомобиля, которая включает импульсные датчики частот вращения колес автомобиля, связанные с блоком сопряжения линиями связи и с блоком обработки информации, выполненным с возможностью получения от датчиков частот вращения колес автомобиля посредством линий связи и блока сопряжения модулированные сигналы и формирования на их основании и на основании настроечных параметров оценок физических параметров, характеризующих состояние автомобиля, и с возможностью формирования, после соответствующего анализа управляющих воздействий на устройства управления акселератором и/или тормозной системой, на устройство индикации включения торможения, на блок ввода и отображения информации, включающий устройство ввода настроечной информации и выбора режима отображения информации, и на устройства управления акселератором и/или тормозной системой.
Технический результат состоит в динамической стабилизации безопасной скорости автомобиля на виражах, за счет чего предотвращается снос передних и занос задних колес автомобиля, за счет чего соответственно расширяется число реализуемых функций и облегчается обнаружение предпосылок к ДТП.
Заявленное изобретение поясняется рисунками, где:
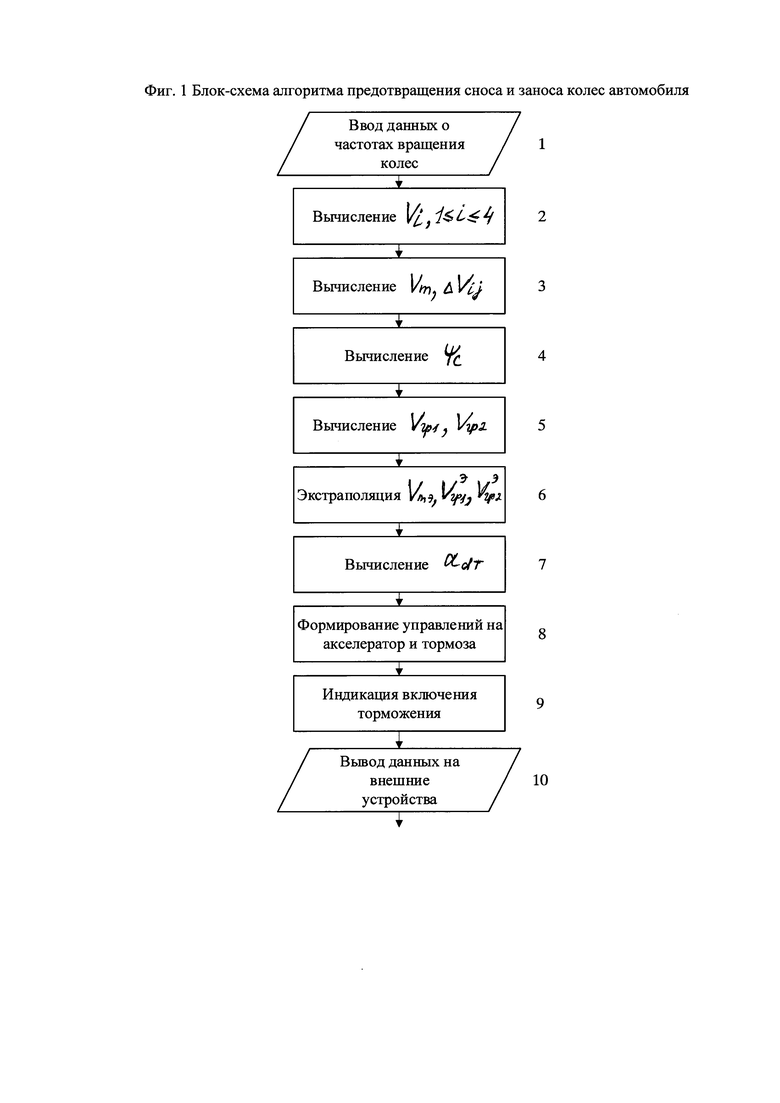
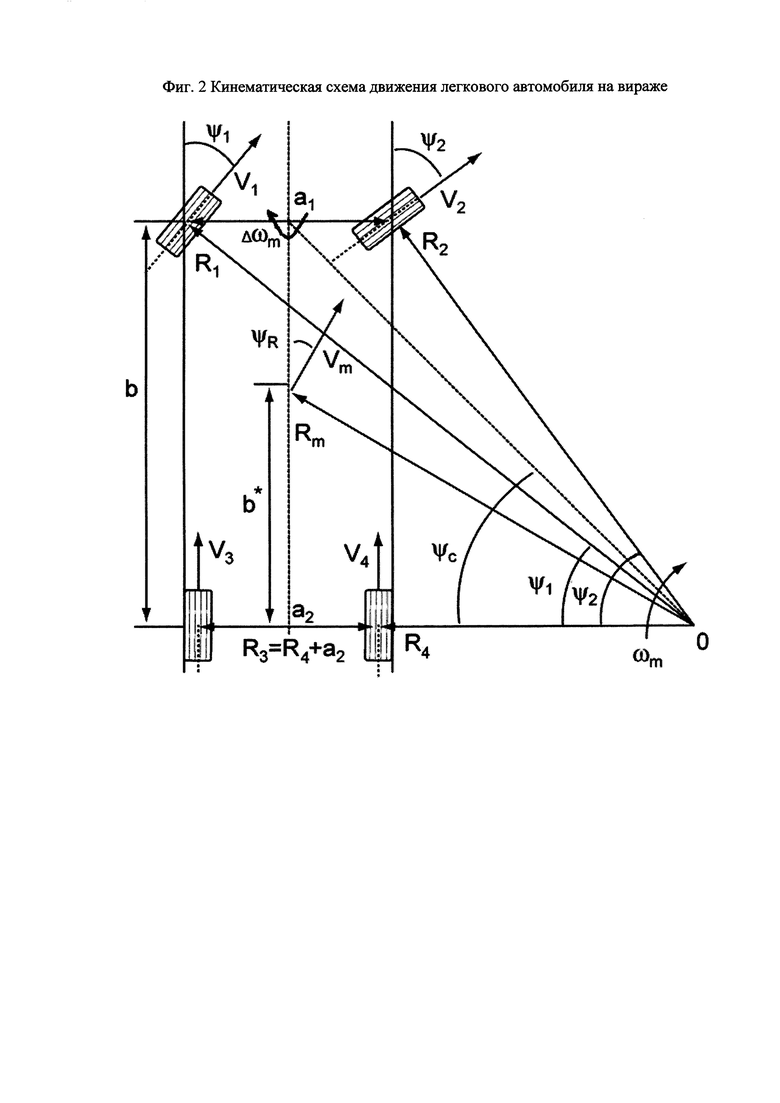
на фиг. 1 представлена блок-схема алгоритма предотвращения сноса и заноса колес автомобиля;
на фиг. 2 представлена кинематическая схема движения легкового автомобиля на вираже.
Фиг. 1 содержит вычислительные блоки алгоритма предотвращения сноса или заноса колес автомобиля, реализующие следующие действия способа:
1 - ввод данных о частотах вращения колес;
2 - вычисление продольных скоростей вращения колес;
3 - вычисление продольной скорости центра масс и разности скоростей вращения пар колес;
4 - вычисление угла поворота управляемых колес;
5 - вычисление граничных скоростей сноса и заноса колес автомобиля;
6 - экстраполяция скорости центра масс и граничных скоростей сноса и заноса колес;
7 - вычисление тягово-тормозного ускорения;
8 - формирование управляющих воздействий на акселератор и тормозную систему;
9 - индикация включения торможения;
10 - вывод данных на внешние устройства.
Способ осуществляется следующим образом.
Сигналы, формируемые импульсными датчиками частот вращения колес автомобиля, регистрируют и передают их через блок сопряжения в блок обработки информации.
В блоке обработки информации по текущим скоростям вращения колес в режиме реального времени определяют значения физических переменных и сравнивают с заданными истинными значениями, характеризующими критическое состояние автомобиля. А именно, в блоке обработки информации в реальном времени рассчитывают и формируют оценки прогнозируемых скорости центра масс автомобиля, угла поворота управляемых колес, топовых значений коэффициентов трения скольжения колес, а также граничных значений скоростей сноса передних, заноса задних колес автомобиля. Далее на основании сигналов о частотах вращения колес и настроечных параметров с помощью микроконтроллера с известным авторам программным обеспечением и, в случае превышения прогнозируемой скорости центра масс минимальной из прогнозируемых граничных скоростей сноса и заноса колес, формируют управляющие воздействия на устройства управления акселератором и/или тормозной системой для автоматического предотвращения сноса или заноса колес автомобиля и на устройство индикации включения торможения для передачи водителю информации о включении автоматического режима предотвращения сноса или заноса колес автомобиля и предотвращения предпосылок к ДТП.
В качестве математической модели косвенных измерений скорости центра масс автомобиля Vm, угла поворота управляемых колес Ψс, угловой скорости сноса или заноса колес автомобиля Δωm и скоростей продольных скольжений колес автомобиля ΔVSi, используется система уравнений линейных скоростей вращения колес Vi, 1≤i≤4 на вираже:
На фиг. 2 приняты следующие обозначения:
b - колесная база автомобиля;
Ψ1 и Ψ2 - углы поворота соответственно 1-го и 2-го управляемых колес;
Ψc - средний угол поворота управляемых колес;
α1 и α2 - размеры колеи передних и задних колес;
Vi - линейная скорость вращения i-го колеса (1≤i≤4);
Ri - радиусы поворота соответствующих колес;
Rm и Vm - соответственно радиус поворота и линейная скорость продольного движения центра масс;
ΨR - угол рысканья;
b* - расстояние от центра масс до задней оси автомобиля;
ωm - угловая скорость вращения центра масс автомобиля на вираже при движении без сноса или заноса колес.
Дифференциальное уравнение курсового угла:

Решение (2) с учетом формулы Эйлера  в дискретном времени приводится к виду:
в дискретном времени приводится к виду:

Приращение курсового угла ΔΨm(k) на k-ом шаге составляет:

В случае заноса задних колес Δωm совпадает по знаку с Ψc при Vm>0, что приводит к увеличению модуля приращения курсового угла. В случае сноса передних колес Δωm имеет знак, противоположный Ψc, что уменьшает модуль приращения курсового угла. Дополнительное вращение (снос или занос) с частотой Δωm происходит вокруг центра оси передних колес при заносе и относительно центра задних колес при сносе.
Причиной сноса или заноса колес автомобиля является превышение центробежной силы, действующей на колеса передней и задней осей, сил трения скольжения соответствующих пар колес в пятне контакта шины с покрытием в поперечном направлении.
Оценки  1≤i≤4, формируются по данным
1≤i≤4, формируются по данным
измерений частот вращения колес ωi(k) и настроечных данных свободных радиусов Rci(k) колес.
Решение некорректной задачи определения оценок  (1≤i≤4) по известным оценкам
(1≤i≤4) по известным оценкам  настроечным параметрам b, a1≈а, а2≈а при Δωm=0 приведено в алгоритме определенных параметров движения автомобиля (Свидетельство о государственной регистрации программы для ЭВМ №2009616286. ИНКА-СПОРТ Версия 2.0 /Бузников С.Е., Елкин Д.С. // Роспатент, 2009).
настроечным параметрам b, a1≈а, а2≈а при Δωm=0 приведено в алгоритме определенных параметров движения автомобиля (Свидетельство о государственной регистрации программы для ЭВМ №2009616286. ИНКА-СПОРТ Версия 2.0 /Бузников С.Е., Елкин Д.С. // Роспатент, 2009).
Так, в частности, оценка продольной скорости центра масс  определяется в виде:
определяется в виде:

где |ΔVSi(k)+ΔVSj(k)|=min[|ΔVS1(k)+ΔVS2(k)|,|ΔVS3(k)+ΔVS4(k)|,|ΔVS1(k)+ΔVS4(k)|,|ΔVS2(k)+ΔVS3(k)|].
Для пары колес разных бортов разность ΔVi,j=Vi-Vj равна:

Решение (6) в случае 

Принимая оценку  получим, что:
получим, что:


С учетом доопределяющих свойств объекта в виде условий:

где граничные скорости сноса и заноса колес Vгр1 и Vгр2 определяются из условий равенства сил трения скольжения соответствующих передних и задних колес половине центробежной силы:

где  - относительные распределения масс на переднюю (m1+m2) и заднюю (m3+m4) оси к общей массе m0;
- относительные распределения масс на переднюю (m1+m2) и заднюю (m3+m4) оси к общей массе m0;
Rd - динамический радиус колес;
a dT - тягово-тормозное ускорение;
ksq - значение коэффициента трения скольжения колес в поперечном направлении;
g - ускорение свободного падения.
Прогнозирование возникновения сноса или заноса колес (Δωm≠0) автомобиля выполняется путем экстраполяции граничных скоростей Vгр1, Vгр2, и Vm на время τэ и проверяется выполнение неравенства:

где 




В случае, если неравенство (12) выполняется, активируются устройства управления акселератором и/или тормозной системой и устройство вывода графической информации.
Величина тягово-тормозного ускорения adT, достаточного для предотвращения сноса или заноса колес автомобиля определяется из решения уравнения продольного движения центра масс автомобиля:

где
kx - коэффициент лобового аэродинамического сопротивления;
kтр - коэффициент трения качения колес;
αT - угол тангажа автомобиля.
При am=[Vгрэ-Vmэ]ΔT-1 из (13) получим величину adT:

В случае движения по горизонтальной поверхности αT=0, и пренебрегая силами аэродинамического сопротивления и трения качения, получим приближенно:

Распределение тягового-тормозного замедления между двигателем, трансмиссией и тормозной системой выполняется в соответствии с характеристиками этих систем.
Для определения значений коэффициента трения скольжения колес в поперечном направлении ksq используется свойство круга Камма:

где kSdi и kSqi - коэффициенты трения скольжения i-го колеса в продольном и поперечным направлениях соответственно;
 - топовое (максимальное) значение коэффициента трения скольжения i-го колеса.
- топовое (максимальное) значение коэффициента трения скольжения i-го колеса.
Значение kSqi, определяемое из (16) равно:

Значения kSdi определяются в соответствии с третьим законом Ньютона из уравнения равновесия тягово-тормозных сил и сил трения скольжения: тягово-тормозная сила Ft уравновешивается силой трения скольжения FSi=FNi⋅kSdi, где
FNi - нормальная составляющая динамической нагрузки на i-oe колеса.
Модуль |kSdi| определяется из уравнения равновесия сил:  При малых по модулю тягово-тормозных силах согласно (17) коэффициент трения скольжения i-го колеса в поперечно направлении получаем
При малых по модулю тягово-тормозных силах согласно (17) коэффициент трения скольжения i-го колеса в поперечно направлении получаем 
Идентификация  выполняется с использованием зарегистрированного в РОСПАТЕНТЕ программного обеспечения в процессе движения автомобиля (Свидетельство об государственной регистрации программ для ЭВМ №2007610818 «Идентификация максимальных значений коэффициентов трения скольжения колес автомобиля» / Бузников С.Е., Елкин Д.С. // Роспатент, 2007). Входными данными для решения этой задачи являются измеряемые скольжения Si колес и текущие значения коэффициентов трения скольжения колес в продольном направлении kSdi.
выполняется с использованием зарегистрированного в РОСПАТЕНТЕ программного обеспечения в процессе движения автомобиля (Свидетельство об государственной регистрации программ для ЭВМ №2007610818 «Идентификация максимальных значений коэффициентов трения скольжения колес автомобиля» / Бузников С.Е., Елкин Д.С. // Роспатент, 2007). Входными данными для решения этой задачи являются измеряемые скольжения Si колес и текущие значения коэффициентов трения скольжения колес в продольном направлении kSdi.
Для шин одной модели для однородной поверхности

Описанная последовательность действий способа и используемое для его реализации минимальное число технических средств позволяет достичь следующих технических преимуществ над известными способами:
- возможность предотвращения сноса или заноса колес автомобиля до возникновения этих событий, путем выявления условий, приводящих к сносу и заносу;
- низкая стоимость технических средств, обусловленная использованием штатных физических датчиков первичной информации о скорости вращения колес, необходимых и достаточных для решения задачи;
- возможность функционирования в неполной или изменяемой конфигурации штатных датчиков частот вращения колес, включая отказы одного или двух датчиков разных бортов автомобиля;
- пониженное энергопотребление, обусловленное использованием штатных физических датчиков первичной информации;
- более высокая эксплуатационная надежность, обусловленная минимальной конфигурацией используемых технических средств, включая датчики первичной информации;
- возможность функционирования в перспективных системах объективного контроля параметров движения автомобиля с целью расширения числа реализуемых функций и обнаружения предпосылок к ДТП.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ предотвращения сноса и заноса колёс системой помощи водителю автопоезда | 2023 |
|
RU2812000C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ ОПРОКИДЫВАНИЯ АВТОМОБИЛЯ | 2018 |
|
RU2702476C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ СКОРОСТИ ДРИФТА КОЛЕС АВТОМОБИЛЯ | 2018 |
|
RU2717121C2 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ ОПРОКИДЫВАНИЯ АВТОМОБИЛЯ | 2018 |
|
RU2702877C1 |
| Способ предотвращения опрокидывания автопоезда | 2023 |
|
RU2811998C1 |
| Способ определения угловой скорости дополнительного рыскания колёс автопоезда | 2023 |
|
RU2812026C1 |
| Система стабилизации безопасной скорости колесного транспортного средства | 2019 |
|
RU2744642C1 |
| Система предотвращения опрокидывания автопоезда | 2023 |
|
RU2811999C1 |
| Система контроля и предотвращения дополнительного рыскания колёс автомобиля | 2023 |
|
RU2812030C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ АВАРИЙНОГО ПЕРЕГРЕВА ШИН И ТОРМОЗОВ АВТОМОБИЛЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2513439C1 |
Изобретение относится к автомобилестроению, в частности к способу активной безопасности транспортного средства. Сигналы, формируемые импульсными датчиками частот вращения колес автомобиля, регистрируют и передают их через блок сопряжения в блок обработки информации. В блоке обработки информации по текущим скоростям вращения колес в режиме реального времени определяют значения физических переменных и сравнивают с заданными истинными значениями, характеризующими критическое состояние автомобиля. А именно, в блоке обработки информации в реальном времени рассчитывают и формируют оценки прогнозируемых скорости центра масс автомобиля, угла поворота управляемых колес, топовых значений коэффициентов трения скольжения колес, а также граничных значений скоростей сноса передних, заноса задних колес автомобиля. Далее на основании сигналов о частотах вращения колес и настроечных параметров с помощью микроконтроллера с программным обеспечением и, в случае превышения прогнозируемой скорости центра масс минимальной из прогнозируемых граничных скоростей сноса и заноса колес, формируют управляющие воздействия на устройства управления акселератором и/или тормозной системой для автоматического предотвращения сноса и/или заноса колес автомобиля и на устройство индикации включения торможения для передачи водителю информации о включении автоматического режима предотвращения сноса или заноса колес автомобиля и предотвращения предпосылок к ДТП. Достигается прогнозирование и предотвращение сноса и заноса колес автомобиля. 2 ил.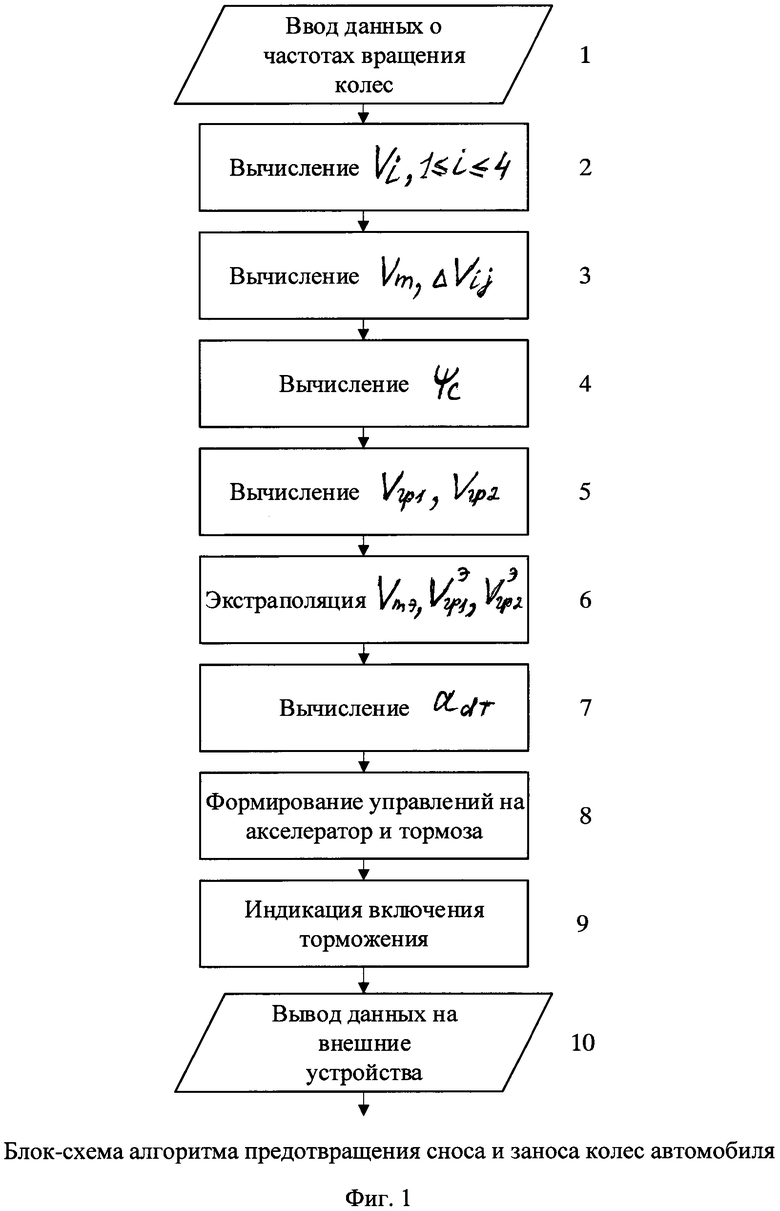
Способ предотвращения сноса и заноса колес автомобиля, при котором регистрируют и обрабатывают сигналы, формируемые импульсными датчиками частот вращения колес автомобиля, и передают их через блок сопряжения в блок обработки информации, в котором определяют значения физических переменных, формируют оценки скорости центра масс и угла поворота управляемых колес автомобиля и настроечных параметров с помощью микроконтроллера с программным обеспечением и сравнивают их с граничными значениями, характеризующими критическое состояние автомобиля, и формируют на выходе блока обработки информации управляющие сигналы, передаваемые на устройства управления акселератором и/или тормозной системой и устройство индикации включения торможения, отличающийся тем, что в блоке обработки информации в реальном времени формируют оценки прогнозируемых скорости центра масс, угла поворота управляемых колес автомобиля, топовых значений коэффициентов трения скольжения колес и граничных значений скоростей заноса и сноса колес на основании математической обработки сигналов о частотах вращения колес и настроечных параметров с помощью микроконтроллера с программным обеспечением, прогнозирование возникновения сноса или заноса колес (Δωm ≠ 0) автомобиля выполняют путем экстраполяции граничных скоростей сноса колес Vгp1, заноса колес Vгр2 и скорости центра масс Vm на время τэ и, в случае превышения прогнозируемой скорости центра масс Vmэ минимальной из прогнозируемых граничных скоростей сноса Vгp1э и заноса Vгр2э колес, формируют управляющие воздействия на устройства управления акселератором и/или тормозной системой для автоматического предотвращения сноса или заноса колес автомобиля и на устройство индикации включения торможения для передачи водителю информации о включении автоматического режима предотвращения сноса и/или заноса колес автомобиля и предотвращения предпосылок к ДТП.
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ С ПРЕПЯТСТВИЯМИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2335805C1 |
| СПОСОБ МНОГОЧАСТОТНОГО ФАЗОВОГО ЗОНДИРОВАНИЯ (МФЗ-СПОСОБ) ПОИСКОВ И ДЕТАЛЬНОЙ РАЗВЕДКИ НЕФТЕГАЗОВЫХ ЗАЛЕЖЕЙ И ПОИСКОВО-РАЗВЕДОЧНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2545463C1 |
| RU 2009123161 A, 27.12.2010. | |||

