Изобретение относится к автоматике электрических сетей и предназначено для контроля успешного автоматического повторного включения (АПВ) головного выключателя (ГВ) линии с уменьшением времени выдержки на его включение.
Известен способ контроля над изменением состояния ГВ в линии кольцевой сети, заключающийся в том, что с момента появления броска тока КЗ в начале секционированной линии кольцевой сети отсчитывают время, равное времени срабатывания защиты ГВ линии, и контролируют момент отключения броска тока КЗ. Если момент окончания отсчета времени совпадает с моментом отключения первого броска тока КЗ, то устанавливают факт отключения ГВ. А далее с момента отключения первого броска тока КЗ начинают отсчет времени выдержки АПВ ГВ и отсчет суммарного времени, равного времени выдержки АПВ ГВ и времени срабатывания его защиты с ускорением. При этом контролируют появление второго броска тока, и если в момент окончания отсчета времени выдержки АПВ ГВ отсутствует второй бросок тока значением больше нормального рабочего, но меньше тока КЗ или равный току КЗ, то устанавливают факт отказа АПВ ГВ линии кольцевой сети. Или в момент окончания отсчета времени выдержки АПВ ГВ появляется второй бросок тока значением больше нормального рабочего, но меньше тока КЗ, то устанавливают факт успешного АПВ ГВ, или если появляется второй бросок тока КЗ в момент окончания отсчета времени выдержки АПВ ГВ, то устанавливают факт неуспешного АПВ ГВ линии кольцевой сети. А далее если после появления второго броска тока КЗ, в момент окончания отсчета суммарного времени, не происходит отключение второго броска тока КЗ, то устанавливают факт отказа отключения ГВ при повторном включении [патент RU №2410817 С1, кл. H02J 13/00, 9/06, опубл. 27.01.2011, бюл. №3].
Недостатком известного способа является невозможность с его помощью осуществления контроля успешного АПВ ГВ линии с уменьшением времени выдержки на его включение.
Задачей предлагаемого изобретения является расширение функциональных возможностей способа путем получения информации об успешном АПВ ГВ линии с уменьшением времени выдержки на его включение.
Согласно предлагаемому способу при появлении броска тока КЗ во все провода линии посылают зондирующие импульсы и определяют параметры аварийного режима путем вычисления количества точек отражения и расстояний до каждой точки, после исчезновения тока КЗ аналогичным образом снова определяют параметры линии и сравнивают их с ранее определенными параметрами аварийного режима и параметрами нормального режима, определенными в нормальном режиме работы линии, и если в начале сравнения параметры, полученные после исчезновения тока КЗ, будут одинаковыми с параметрами нормального режима, то подают сигнал на АПВ ГВ, а если параметры, полученные после исчезновения тока КЗ будут одинаковыми с параметрами аварийного режима, то продолжают определять и сравнивать эти параметры, и если позже, в какой-то момент времени до окончания времени выдержки АПВ ГВ, вычисленные параметры становятся одинаковыми с параметрами нормального режима, тогда подают сигнал на его включение, и если фиксируют после этого бросок рабочего тока, то делают вывод об успешном АПВ ГВ линии с уменьшением времени выдержки на его включение.
Суть предлагаемого изобретения поясняется чертежами, где:
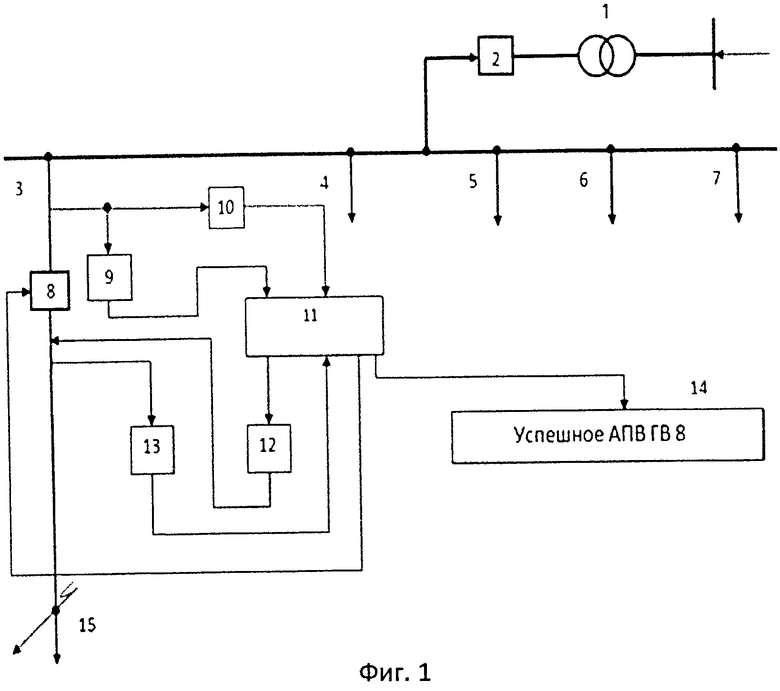
- на фиг.1 предоставлена структурная схема, содержащая элементы для реализации способа;
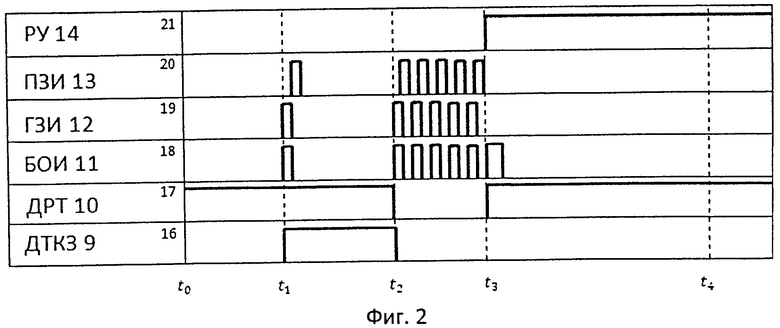
- на фиг.2 - диаграммы сигналов на выходах элементов, показанных на фигуре 1 при неустойчивом КЗ в точке 15 (см. фиг.1).
Схема (см. фиг 1) содержит: силовой трансформатор 1, вводной выключатель 2, линии 3, 4, 5, 6 и 7, головной выключатель 8, датчик тока короткого замыкания (ДТКЗ) 9, датчик рабочего тока (ДРТ) 10, блок обработки информации (БОИ) 11, генератор зондирующих импульсов (ГЗИ) 12, приемник зондирующих импульсов (ПЗИ) 13, регистрирующее устройство (РУ) 14, точку КЗ 15.
Диаграммы сигналов на выходах элементов, показанных на фигуре 1 при КЗ в точке 15 (см. фиг.1), имеют вид (см. фиг.2): 16 - на выходе элемента 9, 17 - на выходе элемента 10, 18 - на выходе элемента 11, 19 - на выходе элемента12, 20 - на выходе элемента13, 21 - вРУ 14.
На фиг.2 кроме диаграмм выходных сигналов элементов схемы также показаны: t1 - момент времени возникновения неустойчивого КЗ в точке 15, t2 - момент времени отключения тока КЗ, t3- момент времени самоустранения КЗ, t4 - момент окончания времени выдержки АПВ ГВ линии.
Способ осуществляется следующим образом.
В нормальном режиме работы сети вводной выключатель 2 и головной выключатель 8 включены, КЗ в линии нет, поэтому на выходе ДТКЗ 9 сигнала тоже нет (фиг.2, диагр. 16) и схема находится в режиме контроля.
При возникновении неустойчивого КЗ, например, в точке 15 на выходе ДТКЗ 9 появится сигнал (фиг.2, диагр. 16, момент времени t1), который поступит на первый вход БОИ 11 при этом с его первого выхода (фиг.2, диагр. 18) пойдет сигнал, который поступит в ГЗИ 12. При этом ГЗИ 12 пошлет зондирующие импульсы во все провода линии (фиг.2, диагр. 19), которые, дойдя до точек отражения, вернутся обратно и поступят в ПЗИ 13 и с его выхода (фиг.2, диагр. 20) поступят в БОИ 11. Этот элемент определит параметры линии путем вычисления расстояний до всех точек отражения, которые будут являться параметрами аварийного режима линии. Через время выдержки срабатывания защиты ГВ 8 отключится и с выхода ДТКЗ 9 сигнал исчезнет (фиг.2, диагр. 16, момент времени t2). В этот момент времени с выхода БОИ 11 на вход ГЗИ 12 снова пойдет сигнал (фиг.2, диагр. 18, момент времени t2), при этом с его выхода во все провода линии с определенной переодичностью снова пойдут зондирующие импульсы (фиг.2, диагр. 19), которые, дойдя до точек отражения и вернувшись обратно, поступят в ПЗИ 13, а с его выхода (фиг.2, диагр. 20) поступят в БОИ 11. Этот элемент, снова, при каждом поступлении отраженных импульсов, определит параметры линии и сравнит их с параметрами нормального режима, полученными аналогичным образом в нормальном режиме работы линии, и если параметры, полученные после отключения тока КЗ будут одинаковыми с параметрами нормального режима, то БОИ 11 прекратит посылку сигналов в ГЗИ 12 и подаст команду на АПВ ГВ 8, при этом посылка зондирующих импульсов в линию прекратится. А если параметры линии, полученные после отключения тока КЗ, будут одинаковыми с параметрами аварийного режима, то посылка зондирующих импульсов в линию будет продолжаться до момента самоустранения КЗ, которое произойдет, например, в момент времени t3. В этом случае параметры линии станут одинаковыми с параметрами нормального режима и тогда прекратится посылка зондирующих импульсов в линию, а со второго выхода БОИ 11 пойдет сигнал (фиг.2, диагр. 18, момент времени t3), который подаст команду на АПВ ГВ 8. Он включится, на выходе ДРТ 10 появится сигнал (фиг.2, диагр. 17), который поступит на второй вход БОИ 11, при этом на его третьем выходе появится сигнал (фиг.2, диагр. 18, момент времени t3). Этот сигнал поступит в РУ 14, и там появится информация об успешном АПВ ГВ 8 с уменьшением времени выдержки на его включение.
Таким образом, при использовании предлагаемого способа можно получить информацию об успешном АПВ ГВ линии с уменьшением времени выдержки на его включение.
Использование: в области электротехники. Технический результат - расширение функциональных возможностей. Согласно способу при появлении броска тока КЗ во все провода линии посылают зондирующие импульсы и определяют параметры аварийного режима путем вычисления количества точек отражения и расстояний до каждой точки, после исчезновения тока КЗ, аналогичным образом, снова определяют параметры линии и сравнивают их с ранее определенными параметрами аварийного режима и параметрами нормального режима, определенными в нормальном режиме работы линии и, если в начале сравнения параметры, полученные после исчезновения тока КЗ, будут одинаковыми с параметрами нормального режима, то подают сигнал на АПВ ГВ, а если указанные параметры будут одинаковыми с параметрами аварийного режима, то продолжают определять и сравнивать эти параметры, и если позже, в какой-то момент времени до окончания времени выдержки АПВ ГВ, вычисленные параметры становятся одинаковыми с параметрами нормального режима, тогда подают сигнал на его включение и, если фиксируют после этого бросок рабочего тока, то делают вывод об успешном АПВ ГВ линии с уменьшением времени выдержки на его включение. 2 ил.
Способ контроля успешного автоматического повторного включения (АПВ) головного выключателя (ГВ) линии с уменьшением времени выдержки на его включение, заключающийся в фиксации бросков тока и в измерении времени между ними, отличающийся тем, что при появлении броска тока КЗ во все провода линии посылают зондирующие импульсы и определяют параметры аварийного режима путем вычисления количества точек отражения и расстояний до каждой точки, после исчезновения тока КЗ аналогичным образом снова определяют параметры линии и сравнивают их с ранее определенными параметрами аварийного режима и параметрами нормального режима, определенными в нормальном режиме работы линии, и если в начале сравнения параметры, полученные после исчезновения тока КЗ, будут одинаковыми с параметрами нормального режима, то подают сигнал на АПВ ГВ, а если параметры, полученные после исчезновения тока КЗ, будут одинаковыми с параметрами аварийного режима, то продолжают определять и сравнивать эти параметры, и если позже, в какой-то момент времени до окончания времени выдержки АПВ ГВ, вычисленные параметры становятся одинаковыми с параметрами нормального режима, тогда подают сигнал на его включение, и если фиксируют после этого бросок рабочего тока, то делают вывод об успешном АПВ ГВ линии с уменьшением времени выдержки на его включение.
| СПОСОБ КОНТРОЛЯ ИЗМЕНЕНИЙ СОСТОЯНИЯ ГОЛОВНОГО ВЫКЛЮЧАТЕЛЯ В ЛИНИИ КОЛЬЦЕВОЙ СЕТИ | 2009 |
|
RU2410817C1 |
| СПОСОБ КОНТРОЛЯ ОТКАЗА ВКЛЮЧЕНИЯ ПУНКТА АВТОМАТИЧЕСКОГО ВКЛЮЧЕНИЯ РЕЗЕРВА В КОЛЬЦЕВОЙ СЕТИ | 2001 |
|
RU2215356C2 |
| Способ дистанционного контроля функционирования коммутационных аппаратов сети трансформаторных подстанций | 1990 |
|
SU1778866A1 |
| ПРОИЗВОДНЫЕ ИМИДАЗОЛА В КАЧЕСТВЕ ИНГИБИТОРОВ ФОСФОДИЭСТЕРАЗЫ VII | 2000 |
|
RU2259199C2 |

