Изобретение относится к способам управления воздействующей силой вибрационных колебаний и к устройствам для возбуждения механических вибрационных колебаний вращающимися неуравновешенными массами.
Изобретение может быть использовано в испытательном и технологическом оборудовании.
Известен способ управления воздействующей силой при возбуждении вибрационных колебаний, реализуемый регулируемым дебалансным вибратором (Патент RU 2009857, B06B 1/10), заключающийся в изменении взаимного углового положения неуравновешенных масс приводом их вращения во время вращения вокруг общей оси тем же приводом и последующей фиксацией указанного положения с использованием фрикционного механизма с электромагнитным приводом.
Недостатком указанного способа является отсутствие точности управляемого изменения углового положения неуравновешенных масс и его повторяемости ввиду использования нестабильных свойств механизма фиксации (фрикционных свойств и времени срабатывания), а также отсутствие возможности произведения изменений в обратном направлении без остановки работы механизма, связанной с тем, что изменение углового положения неуравновешенных масс производится только в попутном направлении привода вращения и одновременно с вращением.
Наиболее близким является способ возбуждения вибрационных колебаний (Патент RU 2387488, B06B 1/16), при котором изменение углового положения неуравновешенных масс производится отдельным приводом, дискретно путем кратковременного включения фиксатора.
Недостатком указанного способа является отсутствие возможности бесступенчатого изменения углового положения неуравновешенных масс, особенно малых перемещений, обусловленных использованием дискретного механизма фиксации (штыря и пазов), а также отсутствие возможности произведения изменений в обратном направлении без остановки работы механизма, связанной с использованием однонаправленного привода изменения углового положения (пружины).
Известен одновальный вибровозбудитель направленного действия (Патент RU 2008101, B06B 1/16), включающий корпус, один или два приводных двигателя, дебалансный вал, с жестко и свободно посаженными дебалансами, передачи от двигателей к дебалансам, отличающийся тем, что валы приводных двигателей соединены с дебалансным валом непосредственно, а дебалансы, свободно и жестко посаженные на валу, связаны между собой посредством жестко прикрепленных к ним конических зубчатых колес и промежуточных конических зубчатых колес, одна часть последних установлена на неподвижные оси в корпусе вибровозбудителя, а другая часть - на аксиально-подвижные оси, которые оснащены механизмами их поступательного перемещения.
Недостатками данного вибровозбудителя являются: дискретность регулирования возмущающего усилия, сложность переключения зубчатых передач без остановки механизма.
Наиболее близким является дебалансный вибровозбудитель (Патент RU 2387488, B06B 1/16), включающий вал, на котором расположен дебаланс, выполненный из двух дебалансных масс, установленных с возможностью регулирования их углового положения относительно друг друга, причем одна из указанных дебалансных масс, установленная на валу с возможностью свободного вращения, выполнена с расположенными по образующей полудиска пазами и связана с концом пружины, другой конец которой закреплен на указанном валу, при этом другая дебалансная масса, жестко закрепленная на указанном валу, снабжена, по меньшей мере, одним подвижным шипом, установленным с возможностью сцепления с указанными пазами в первой дебалансной массе и связанным с выходом блока управления следящей системы.
Недостатками данного вибровозбудителя являются: дискретность регулирования возмущающего усилия, обусловленная величиной дискретного изменения положений дебалансов, размерами фиксирующего шипа, количеством и расстоянием между пазами, а также невозможность регулирования в обратном направлении.
Единым техническим результатом группы изобретений является обеспечение плавности и всенаправленности регулирования воздействующей силы в широком диапазоне частот механических колебаний, в том числе гармонических, независимо по каждой из гармоник, без прерывания процесса вибрирования, сохранения фазы колебания, точного постоянства законов изменения (сохранения) взаимного расположения дебалансов группы валов, а также расширение пределов регулирования, уменьшение осевых или диаметральных размеров вибратора и равномерная передача вибрации внешней среде по всей поверхности излучателя.
Указанный технический результат достигается за счет того, что при возбуждении вибрационных колебаний вращением двух и более дебалансных масс вибрационного источника изменение их взаимного углового расположения производят плавно, отдельными приводами вращения каждой дебалансной массы при непрерывном вращении;
- изменение их взаимного углового расположения производят плавно путем сложения движений двух и более приводов при непрерывном вращении, при этом хотя бы один из приводов обеспечивает вращение минимум одного сателлита вокруг общей оси;
- поддержание воздействующей силы на постоянном уровне при изменении частоты вибрации производят изменением относительных угловых положений дебалансных масс в направлении: при увеличении частоты они направлены от 0 к π рад, а при уменьшении - от π к 0 рад;
- изменение воздействующей силы при постоянной частоте вибрации производят путем попарного изменения относительных угловых положений дебалансных масс в противоположных направлениях, причем для увеличения воздействующей силы они направлены от π к 0 рад, а для уменьшения - от 0 к π рад;
- в случае нечетного количества дебалансных масс, равных по величине, плоскость симметрии изменения относительных угловых положений дебалансных масс проходит через центр тяжести одной из дебалансных масс, которая в процессе изменения воздействующей силы продолжает вращаться с прежней скоростью;
- при возбуждении гармонических колебаний одновременно изменяют составы дебалансов, обеспечивающих возбуждение вибрационных колебаний минимум двух гармоник;
- привод валов выполнен в виде дифференциального механизма, один привод которого связан с водилом и расположенными на нем сателлитами, минимум по количеству валов, причем минимум один сателлит связан с валом и с неподвижным колесом, и минимум еще один сателлит связан с соответствующим валом и подвижным колесом, имеющим свой привод;
- минимум один из сателлитов выполнен в виде многовенцового блока шестерен, один венец которого контактирует с колесом, а каждый следующий - с соответствующим валом;
- минимум один из дебалансов выполнен из двух и более частей, расположенных симметрично относительно их общего центра тяжести;
- центры тяжести дебалансов минимум двух валов расположены в одной перпендикулярной оси вращения плоскости;
- дебалансные массы минимум двух валов равны по величине и их центры тяжести расположены на одинаковых расстояниях от оси вращения валов;
- центры тяжести минимум двух дебалансов располагаются в одной с центром тяжести вибровозбудителя перпендикулярной оси вращения плоскости;
- центр тяжести площади излучателя и центры тяжести дебалансов располагаются в одной перпендикулярной оси вращения плоскости, а перпендикуляр, проходящий через центр тяжести площади излучателя, пересекает ось вращения дебалансов;
- привод водила и дифференциальный механизм расположены в осевом направлении по противоположные стороны от дебалансов.
Сущность изобретения поясняется кинематическими схемами, где:
на фиг.1 - вибратор с двумя приводами;
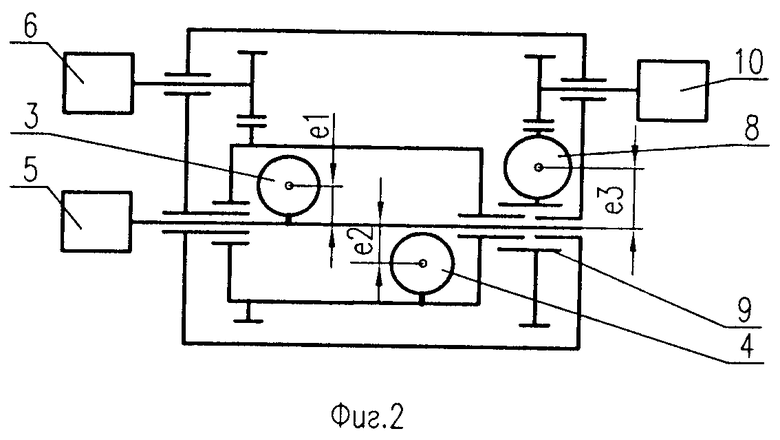
на фиг.2 - вибратор с приводами более двух;
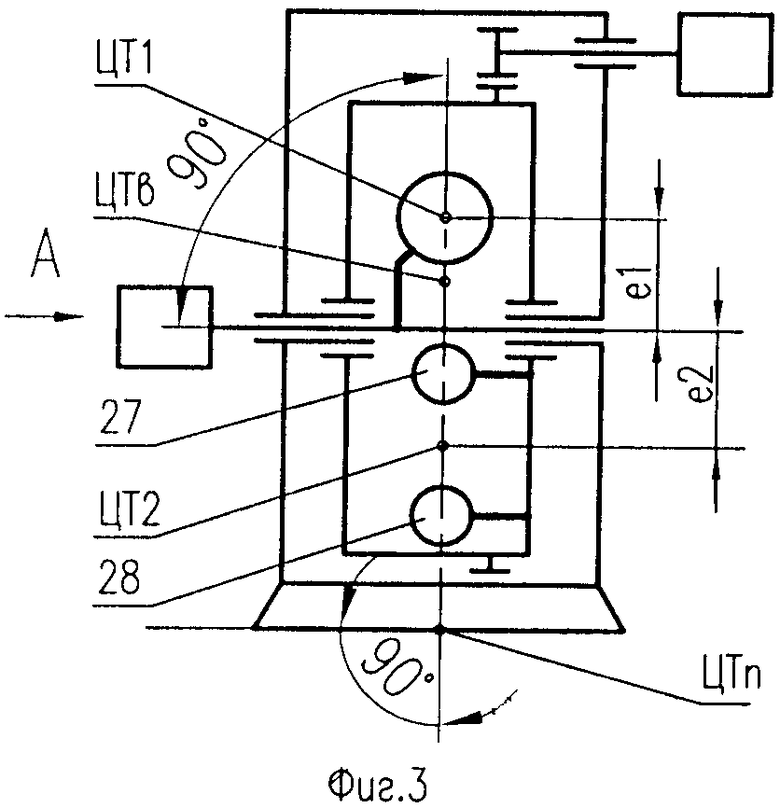
на фиг.3 - вибратор с дебалансами в одной перпендикулярной оси вращения плоскости, причем один из дебалансов состоит из нескольких частей;
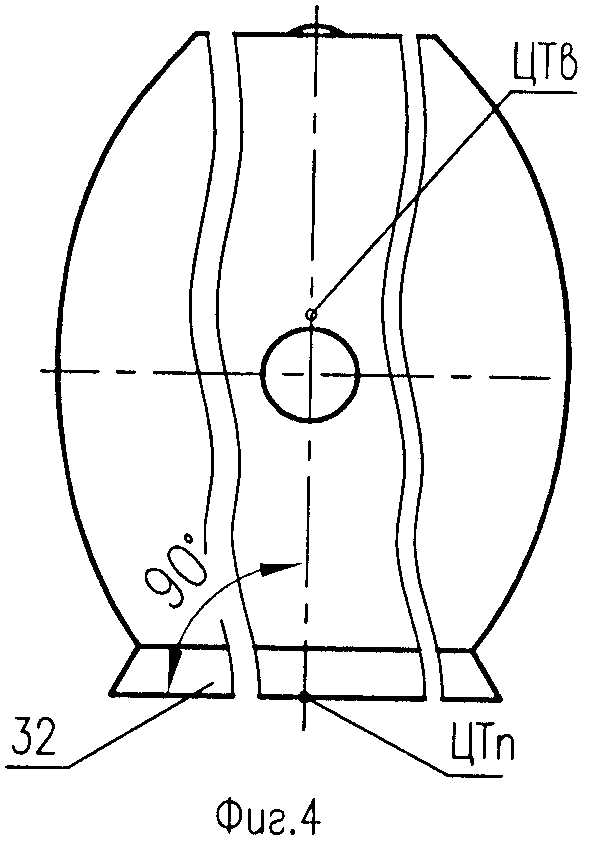
на фиг.4 - вид А на Фиг.3.
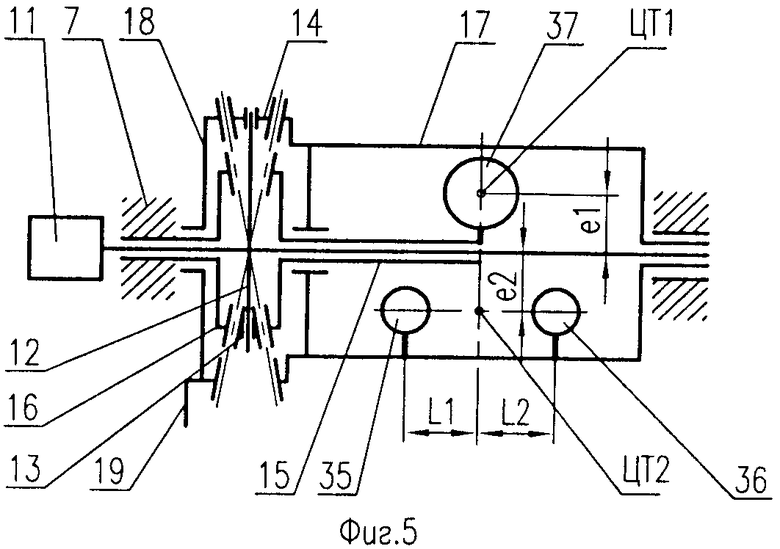
на фиг.5 - вибратор с дифференциальным приводом и дебалансами, расположенными на одинаковом расстоянии от оси вращения в положении минимального возмущающего усилия;
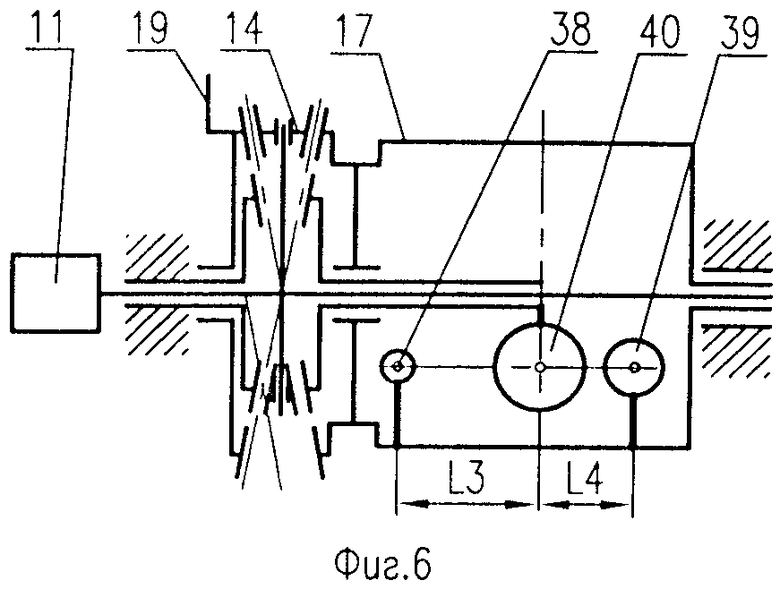
на фиг.6 - вибратор, изображенный на фигуре 5 в положении максимального возмущающего усилия;
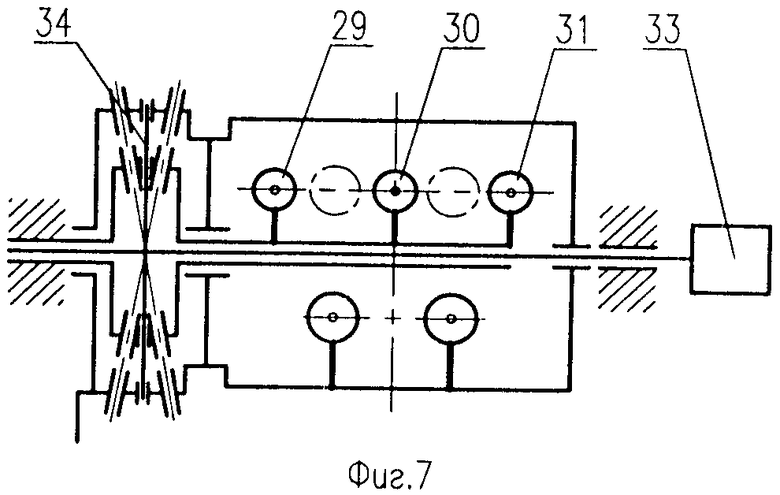
на фиг.7 - вибратор с дифференциалом и приводом, расположенными по разные стороны от дебалансов;
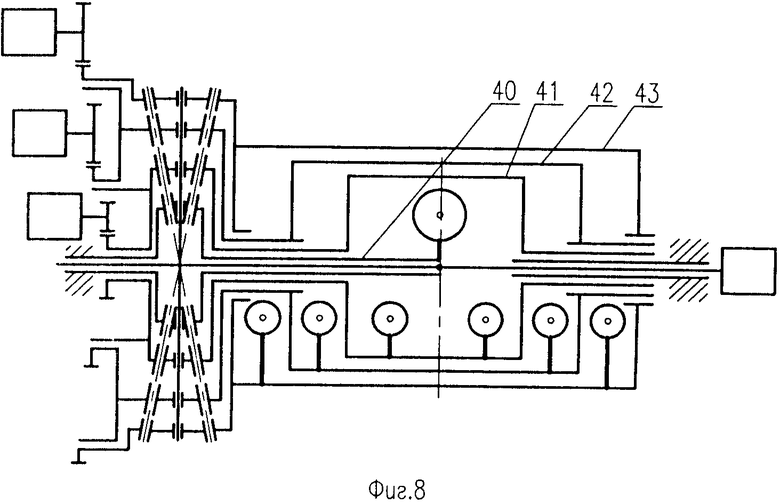
на фиг.8 - вибратор для получения частотно-модулированных колебаний с раздельным регулированием воздействующего усилия по гармоникам;
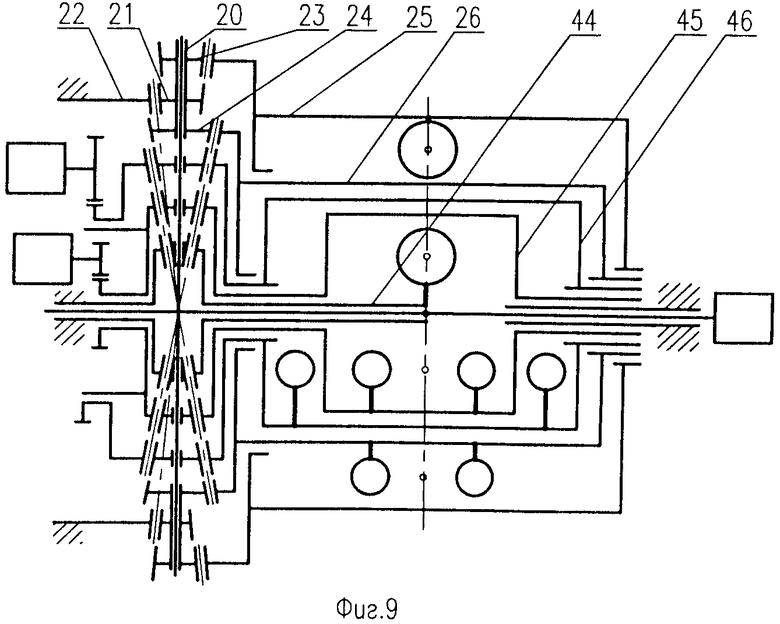
на фиг.9 - вибратор с сателлитом в виде блока шестерен;
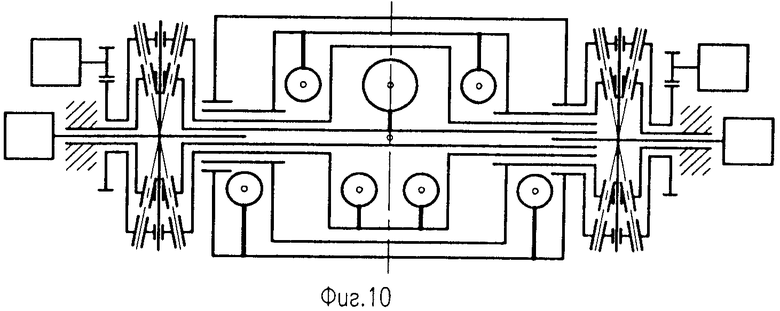
на фиг.10 - симметричный вибратор с двумя дифференциалами;
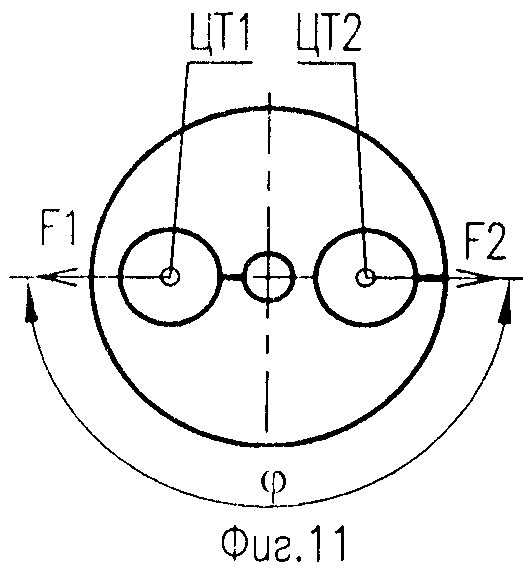
на фиг.11 и 12 - схемы углового расположения двух и более дебалансов в уравновешенном положении;
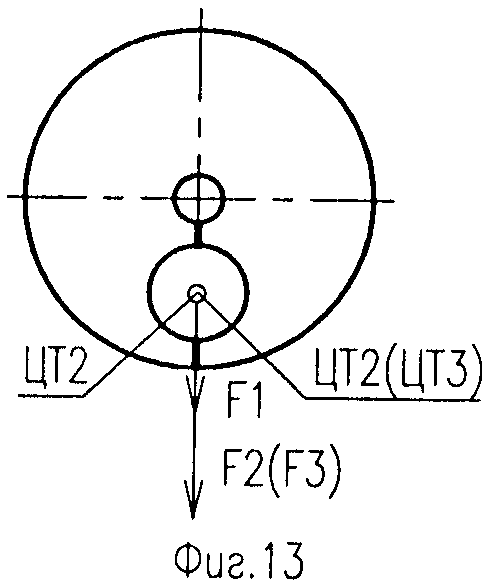
на фиг.13 - схема углового расположения двух и более дебалансов в положении максимального дебаланса;
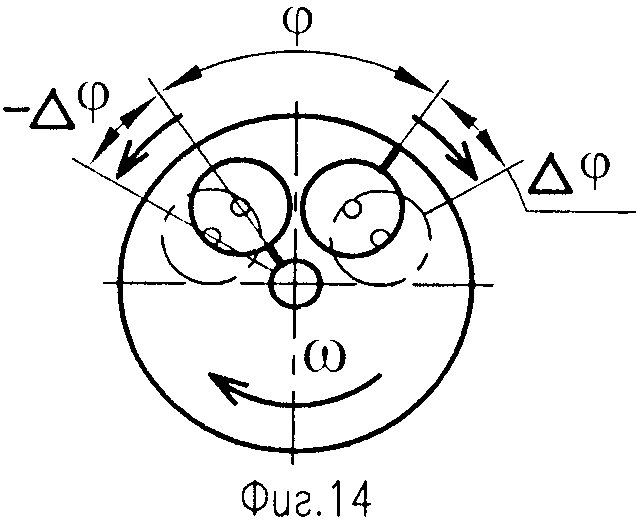
на фиг.14 и 15 - схемы направлений угловых Δφ и -Δφ перемещений дебалансов при регулировании воздействующего усилия.
Вибратор выполнен в виде внецентренно расположенных на соосных валах 1 и 2 масс, называемых дебалансами 3 и 4 (фиг.1), один из которых условно считается основным, задающим частоту вибрации, а второй дополнительным - регулирующим взаимное расположение дебалансов. Во время работы вибратора они могут меняться ролями или выполнять одинаковые функции. Валы снабжены приводами 5; 6 и установлены в корпусе 7. Привод основного дебаланса по степени управляемости может быть постоянным, управляемым, позволяющим изменение частоты вращения дебаланса в требуемых пределах или регулируемым, позволяющим изменение частоты вращения дебаланса и ее автоматическое поддержание с заданной точностью. Привод дополнительного дебаланса выполнен управляемым или регулируемым, позволяющим поддерживать определенное угловое относительное положение дебалансов и его изменение в любом направлении, т.е. обгонять или отставать от привода основного дебаланса.
Вибратор может содержать несколько дополнительных дебалансов, например (фиг.2) дебаланс 8, расположенный на валу 9 с приводом 10.
Привод валов дебалансов может быть выполнен в виде дифференциального механизма (фиг.5), привод 11 которого связан с водилом 12 и расположенными на нем сателлитами 13 и 14. Сателлитов может быть минимум по количеству валов, каждый из которых взаимодействует с соответствующим валом. Сателлит 13 связан с валом 15 и с неподвижным колесом 16, а сателлит 14 связан с соответствующим валом 17 и подвижным колесом 18, имеющим свой привод 19, который имеет фиксацию в любом из угловых положений и может быть выполнен ручным. Привод подвижного колеса в этом случае должен быть реверсивным. Вместо одного сателлита с каждым валом может взаимодействовать два и более сателлитов одинакового назначения, расположенные по окружности (фиг.7).
Минимум один из сателлитов, например 20 (фиг.9), может быть выполнен в виде многовенцового блока шестерен, один венец 21 которого взаимодействует с приводным или неподвижным колесом 22, а каждый следующий 2 3 и 2 4 - с соответствующим валом 2 5 и 26. Венец 21 также может взаимодействовать с отдельным валом.
Дебалансы отдельных валов могут быть выполнены равными по массе (фиг.1).
Дебалансы отдельных валов могут быть также выполнены из двух и более частей 27; 28 (фиг.3) и 29; 30; 31 (фиг.7). При этом при равенстве масс M1 и M2 частей 35 и 36 (фиг.5) они будут располагаться симметрично относительно общего центра тяжести дебаланса, т.е. L1=L2. При различных массах частей 38 и 3 9 их расстояния соответственно L3 и L4 до общего центра тяжести будут обратно пропорциональны их массам M3 и M4.
Центр ЦТ1 тяжести дебаланса 37 отдельного вала, а в случае выполнения дебаланса из нескольких частей 35 и 36 (фиг.5) - их общий центр ЦТ2 тяжести, могут быть расположены на одинаковом расстоянии e1=e2 расположения других дисбалансов от оси вращения (Фиг.3 и 5).
Центр ЦТ1 тяжести дебаланса отдельного вала, а в случае выполнения дебаланса из нескольких частей - их общий центр ЦТ2 тяжести, могут быть расположены в одной перпендикулярной оси вращения плоскости как с дебалансами других валов, так и с центром ЦТв тяжести вибратора вцелом (фиг.3).
Центр ЦТп тяжести проекции площади излучателя на плоскость, параллельную оси вращения валов, и центры ЦТ1 и ЦТ2 тяжести дебалансов могут располагаться в одной перпендикулярной оси вращения плоскости, а перпендикуляр, проходящий через центр ЦТп указанной проекции площади излучателя 32, пересекать ось вращения дебалансов (фиг.4).
Привод 33 (фиг.7) водила и дифференциальный механизм 34 могут быть расположены в осевом направлении по противоположные стороны от дебалансов.
Предлагаемый способ управления воздействующей силой содержит операции возбуждения вибрационных колебаний путем вращения двух и более дебалансных масс, изменения их взаимного углового расположения, причем указанное изменение производят плавно, отдельными приводами вращения каждой дебалансной массы при непрерывном вращении или путем сложения движений двух и более приводов при непрерывном вращении.
Поддержание воздействующей силы на постоянном уровне при изменении частоты вибрации производят изменением относительных угловых положений дебалансных масс в направлении: при увеличении частоты они направлены от 0 к π рад, а при уменьшении - от π к 0 рад.
Изменение воздействующей силы при постоянной частоте вибрации производят путем попарного изменения относительных угловых положений дебалансных масс в противоположных направлениях, причем для увеличения воздействующей силы они направлены от π к 0 рад, а для уменьшения - от 0 к π рад.
В случае нечетного количества дебалансных масс, участвующих в возбуждении вибрационных колебаний одной частоты и равных по величине, плоскость симметрии изменения относительных угловых положений дебалансных масс проходит через центр тяжести одной из дебалансных масс, которая в процессе изменения воздействующей силы продолжает вращаться с прежней скоростью.
При возбуждении гармонических колебаний изменяют составы дебалансов, обеспечивающих возбуждение вибрационных колебаний минимум двух гармоник.
Осуществление способа регулирования воздействующей силы производится дебалансным вибратором, кинематическая схема которого изображена на Фиг.1. Для этого включают привод 5, который придает вращение с определенной угловой скоростью дебалансу 3, установленному на валу 1. Одновременно или в любой последовательности включают привод 6, который через шестерни вращает вал 2 в сторону вращения вала 1 с определенной скоростью, равной скорости вращения вала 1. Ввиду равенства скоростей вращения валов 1 и 2 дебалансы и соответственно их центры тяжести постоянно остаются в определенном угловом положении относительно друг друга. Их центробежные силы F1 и F2, геометрически суммируясь, образуют равнодействующую воздействующую силу, которая передается корпусу 7 и вращается с частотой вращения валов. Если центральный угол φ между дебалансами равен π рад (фиг.11), силы F1 и F2 уравновешивают друг друга и воздействующая сила минимальна. При этом пара сил F1 и F2 на плече L создают момент в продольной плоскости, что не позволяет исключить вибрационное воздействие на окружающую среду и его равномерное распределение по плоскости излучателя. Если центральный угол φ между дебалансами равен 0 рад (фиг.13), то силы F1 и F2 складываются и воздействующая сила максимальна.
Для изменения величины воздействующей силы плавно изменяют скорость вращения одного из приводов, например привод 6 в направлении увеличения (попутное направление). При этом будет происходить плавное изменение центрального угла φ между дебалансами и, следовательно, плавное изменение воздействующей силы при непрерывной вибрации. Например, при изменении центрального угла φ между дебалансами в направлении от π к 0 рад воздействующая сила будет увеличиваться и наоборот, при изменении угла φ в направлении от 0 к π рад воздействующая сила будет уменьшаться. Если изменение возмущающей силы носит характер противоположный требуемому, например возмущающая сила уменьшается, а ее требуется увеличить, то приводом 6 плавно изменяют скорость вращения в противоположном направлении, т.е. в направлении уменьшения скорости (встречное направление). При достижении требуемого значения воздействующей силы привод, в настоящем примере привод 6, переключают на вращение с первоначальной скоростью, равной скорости вращения вала 1.
Изменение центрального угла φ между дебалансами и, следовательно, изменение воздействующей силы прекращается. При использовании регулируемых приводов 5 и 6 угловые положения валов 1 и 2, а также дебалансов 3 и 4 вполне определимы с помощью датчиков обратной связи по положению. Поэтому выбор направления изменения скорости любого из приводов сложности не вызывает.
При регулировании воздействующего усилия одним приводом, как в приведенном примере, происходит сдвиг фазы воздействующего усилия в направлении изменения вращения регулирующего привода на величину, равную половине изменения угла φ между дебалансами.
Чтобы этого не происходило, регулирование воздействующего усилия необходимо производить синхронно, двумя приводами в противоположных направлениях. Для уменьшения воздействующего усилия, как показано на фиг.14, а для увеличения - как показано на фиг.15.
В случае наличия в вибраторе нескольких дополнительных дебалансов, например (фиг.2), появляется возможность получения гармонических колебаний с возможностью изменения воздействующей силы колебаний минимум одной из гармоник. Например, дебаланс 8, расположенный на валу 9 с приводом 10, вращается с одной скоростью, а дебалансы 3 и 4 - с другой, создавая гармонические колебания вибратора. Изменяя относительное угловое положение дебалансов 3 и 4, как было описано ранее, можно плавно изменять воздействующую силу колебаний одной гармоники, возбуждаемых эти дебалансами.
Кроме того, при изменении частоты вращения одного дебаланса, например 4, и вращения его с частотой дебаланса 8, произойдет изменение воздействующих сил колебаний сразу двух гармоник. Таким образом, изменение составов дебалансов, обеспечивающих возбуждение вибрационных колебаний одной из гармоник, обеспечивает расширение диапазона регулирования воздействующих сил колебаний каждой гармоники.
При наличии многовенцового сателлита обеспечивается точное постоянство законов изменения (сохранения) взаимного расположения дебалансов группы валов, взаимодействующих с сателлитом независимо от режимов работы остальных валов вибратора.
При равенстве масс всех дебалансов диапазон регулирования эффективной массы дебаланса составит от 0 до nM,
где n≥2 - количество валов (дебалансов), участвующих в возбуждении колебаний одной гармоники;
M - масса дебаланса одного вала.
Например, на фиг.12 изображена схема вибратора с диапазоном регулирования эффективной массы дебаланса от 0 до 3М.
При различии масс дебалансов расширение диапазона регулирования воздействующих сил колебаний каждой гармоники благодаря увеличению числа комбинаций будет еще шире. Например, при соотношении масс 1:2:3 диапазон регулирования эффективной массы дебаланса, а следовательно, и воздействующих сил колебаний каждой гармоники составит от 1М до 5М (1 и 2±3, 2 и 3±1, 3 и 2±1) или одной гармоники от 0 до 6M.
При наличии двух и более пар дебалансов (фиг.8) появляется возможность независимого плавного регулирования колебаний каждой из гармоник, создаваемых дисбалансами пар валов 40, 41, 42, и 43 в любых сочетаниях.
Кроме того, при встречном вращении указанных пар валов можно получить направленные колебания с регулируемым воздействующим усилием в одной плоскости, параллельной оси вращения дебалансов, например в вертикальной.
Схема (фиг.3) компоновки дебалансов в одной перпендикулярной оси вращения валов плоскости позволяет уменьшить габарит вибратора в осевом направлении.
Схема (фиг.7) компоновки дебалансов на одинаковом расстоянии от оси вращения наоборот сокращает радиальные размеры вибратора, а расположение минимум одного привода с противоположной стороны от дифференциального механизма приближает общий центр тяжести масс дебалансов к центру тяжести вибратора.
Схема (фиг.10) выполнения вибратора с двумя дифференциальными механизмами, расположенными по разные стороны от дебалансов, позволяет наилучшим образом совместить центр тяжести дебалансов с центром тяжести вибратора и центром тяжести площади излучателя в одной перпендикулярной оси вращения плоскости, а при условии, если перпендикуляр, проходящий через центр тяжести площади излучателя, пересекает ось вращения дебалансов, позволяет излучателем наиболее равномерно передавать вибрацию внешней среде.
Таким образом, отличительные признаки заявленного способа регулирования воздействующего усилия при возбуждении вибрационных колебаний и устройства для его осуществления обеспечивают достижение заявленного технического результата и ряда других преимуществ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАПРАВЛЕННОГО ИНЕРЦИОННОГО ВИБРОВОЗБУЖДЕНИЯ И ДЕБАЛАНСНЫЙ ВИБРОВОЗБУДИТЕЛЬ НАПРАВЛЕННОГО ДЕЙСТВИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2528715C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ ВИБРАЦИОННЫХ КОЛЕБАНИЙ ДЛЯ ПРОВЕДЕНИЯ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ И ДЕБАЛАНСНЫЙ ВИБРОВОЗБУДИТЕЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2387488C1 |
| ВИБРАЦИОННАЯ ТРАНСПОРТИРУЮЩАЯ МАШИНА | 2012 |
|
RU2532235C2 |
| СПОСОБ ВОЗБУЖДЕНИЯ РЕЗОНАНСНЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2010 |
|
RU2441714C1 |
| СПОСОБ НАПРАВЛЕННОГО ИНЕРЦИОННОГО ВИБРОВОЗБУЖДЕНИЯ И ДЕБАЛАНСНЫЙ ВИБРОВОЗБУДИТЕЛЬ НАПРАВЛЕННОГО ДЕЙСТВИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2523045C1 |
| ВИБРАЦИОННАЯ КОНУСНАЯ ДРОБИЛКА | 1992 |
|
RU2040967C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ РЕГУЛИРУЕМЫЙ ВИБРАТОР | 2004 |
|
RU2295396C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ РЕЗОНАНСНЫХ РЕЖИМОВ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ С ПРИВОДОМ ОТ АСИНХРОННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2572657C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ И ПОДДЕРЖАНИЯ РЕЗОНАНСНЫХ РЕЖИМОВ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ С ПРИВОДОМ ОТ АСИНХРОННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2589639C1 |
| ПЛАНЕТАРНЫЙ ВИБРАТОР НАПРАВЛЕННЫХ КОЛЕБАНИЙ | 2024 |
|
RU2829481C1 |

Изобретение относится к способам управления воздействующей силой вибрационных колебаний и к устройствам для возбуждения механических вибрационных колебаний вращающимися неуравновешенными массами и может быть использовано в испытательном и технологическом оборудовании. Заявленная группа изобретений включает способы управления воздействующей силой при возбуждении вибрационных колебаний путем вращения двух и более дебалансных масс путем изменения их взаимного углового расположения, и дебалансный регулируемый вибровозбудитель. Предлагаемый способ управления воздействующей силой содержит операции возбуждения вибрационных колебаний путем вращения двух и более дебалансных масс, изменения их взаимного углового расположения, причем указанное изменение производят плавно, отдельными приводами вращения каждой дебалансной массы при непрерывном вращении или путем сложения движений двух и более приводов при непрерывном вращении, при этом возможно поддержание воздействующей силы на постоянном уровне при изменении частоты вибрации и/или ее изменение при постоянной частоте. В процессе изменения воздействующей силы при возбуждении гармонических колебаний одновременно изменяют составы дебалансов. Предлагаемый дебалансный регулируемый вибровозбудитель включает приводной вал, на котором расположен дебаланс, и дополнительный дебаланс, установленный с возможностью изменения углового положения относительно первого дебаланса, причем дополнительный дебаланс установлен на дополнительном валу, расположенном соосно с первым валом и снабженном приводом, при этом привод валов выполнен в виде дифференциального механизма, один привод которого связан с водилом и расположенными на нем сателлитами, минимум по количеству валов, причем минимум один сателлит связан с валом и с неподвижным колесом, и минимум еще один сателлит связан с соответствующим валом и подвижным колесом, имеющим свой привод. Техническим результатом группы изобретений является обеспечение плавности и всенаправленности регулирования воздействующей силы в широком диапазоне частот механических колебаний, в том числе гармонических, без прерывания процесса вибрирования. 4 н. и 15 з.п. ф-лы, 15 ил. 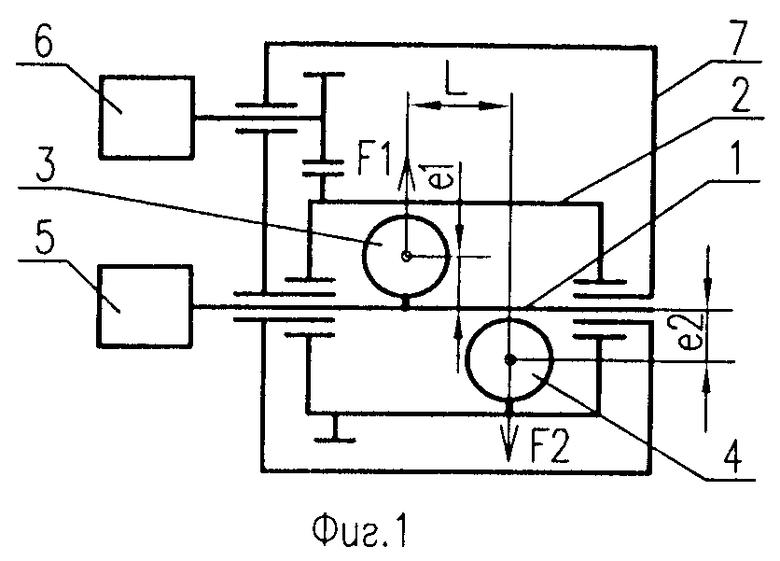
1. Способ управления воздействующей силой при возбуждении вибрационных колебаний путем вращения двух и более дебалансных масс путем изменения их взаимного углового расположения, отличающийся тем, что изменение их взаимного углового расположения производят плавно при непрерывном вращении приводами каждой дебалансной массы.
2. Способ управления по п.1, отличающийся тем, что поддержание воздействующей силы на постоянном уровне при изменении частоты вибрации производят изменением относительных угловых положений дебалансных масс в направлении: при увеличении частоты изменения направлены от 0 к π рад, а при уменьшении - от π к 0 рад.
3. Способ управления по п.1, отличающийся тем, что изменение воздействующей силы при постоянной частоте вибрации производят путем попарного изменения относительных угловых положений дебалансных масс в противоположных направлениях, причем для увеличения воздействующей силы изменения направлены от π к 0 рад, а для уменьшения - от 0 к π рад.
4. Способ управления по п.3, отличающийся тем, что в случае нечетного количества дебалансных масс, участвующих в возбуждении вибрационных колебаний одной частоты и равных по величине, плоскость симметрии изменения относительных угловых положений дебалансных масс проходит через центр тяжести одной из дебалансных масс, которая в процессе изменения воздействующей силы продолжает вращаться с прежней скоростью.
5. Способ управления воздействующей силой при возбуждении вибрационных колебаний путем вращения двух и более дебалансных масс путем изменения их взаимного углового расположения, отличающийся тем, что изменение их взаимного углового расположения производят плавно путем сложения движений двух и более приводов при непрерывном вращении.
6. Способ управления по п.5, отличающийся тем, что поддержание воздействующей силы на постоянном уровне при изменении частоты вибрации производят изменением относительных угловых положений дебалансных масс в направлении: при увеличении частоты изменения направлены от 0 к π рад, а при уменьшении - от π к 0 рад.
7. Способ управления по п.5, отличающийся тем, что изменение воздействующей силы при постоянной частоте вибрации производят путем попарного изменения относительных угловых положений дебалансных масс в противоположных направлениях, причем для увеличения воздействующей силы изменения направлены от π к 0 рад, а для уменьшения - от 0 к π рад.
8. Способ управления по п.7, отличающийся тем, что в случае нечетного количества дебалансных масс, участвующих в возбуждении вибрационных колебаний одной частоты и равных по величине, плоскость симметрии изменения относительных угловых положений дебалансных масс проходит через центр тяжести одной из дебалансных масс, которая в процессе изменения воздействующей силы продолжает вращаться с прежней скоростью.
9. Способ управления воздействующей силой при возбуждении вибрационных колебаний путем вращения двух и более дебалансных масс путем изменения их взаимного углового расположения, отличающийся тем, что при возбуждении гармонических колебаний одновременно изменяют составы дебалансов, обеспечивающих возбуждение вибрационных колебаний минимум двух гармоник.
10. Дебалансный регулируемый вибровозбудитель, включающий приводной вал, на котором расположен дебаланс, и дополнительный дебаланс, установленный с возможностью изменения углового положения относительно первого дебаланса, причем дополнительный дебаланс установлен на дополнительном валу, расположенном соосно с первым валом и снабженном приводом, отличающийся тем, что привод валов выполнен в виде дифференциального механизма, один привод которого связан с водилом и расположенными на нем сателлитами, минимум по количеству валов, причем минимум один сателлит связан с валом и с неподвижным колесом, и минимум еще один сателлит связан с соответствующим валом и подвижным колесом, имеющим свой привод.
11. Дебалансный регулируемый вибровозбудитель по п.10, отличающийся тем, что минимум один из сателлитов выполнен в виде многовенцового блока шестерен, один венец которого контактирует с колесом, а каждый следующий - с соответствующим валом.
12. Дебалансный регулируемый вибровозбудитель по одному из пп.10 или 11, отличающийся тем, что минимум один из дебалансов выполнен из двух и более частей.
13. Дебалансный регулируемый вибровозбудитель по п.12, отличающийся тем, что части дебаланса равны по массе.
14. Дебалансный регулируемый вибровозбудитель по п.13, отличающийся тем, что части дебаланса расположены симметрично относительно их общего центра тяжести.
15. Дебалансный регулируемый вибровозбудитель по одному из пп.10 или 11, отличающийся тем, что центры тяжести дебалансов минимум двух валов расположены в одной перпендикулярной оси вращения плоскости.
16. Дебалансный регулируемый вибровозбудитель по одному из пп.10 или 11, отличающийся тем, что дебалансные массы минимум двух валов равны по величине и их центры тяжести расположены на одинаковых расстояниях от оси вращения валов.
17. Дебалансный регулируемый вибровозбудитель по одному из пп.10 или 11, отличающийся тем, что центры тяжести минимум двух дебалансов располагаются в одной с центром тяжести вибровозбудителя перпендикулярной оси вращения плоскости.
18. Дебалансный регулируемый вибровозбудитель по одному из пп.10 или 11, отличающийся тем, что привод водила и дифференциальный механизм расположены в осевом направлении по противоположные стороны от дебалансов.
19. Дебалансный регулируемый вибровозбудитель по одному из пп.10 или 11, отличающийся тем, что центр тяжести проекции площади излучателя на плоскость, параллельную оси вращения валов, и центры тяжести дебалансов располагаются в одной перпендикулярной оси вращения плоскости, а перпендикуляр, проходящий через центр указанной проекции площади излучателя, пересекает ось вращения дебалансов.
| Вибровозбудитель | 1988 |
|
SU1713672A1 |
| US 5355732 A1 18.10.1994; | |||
| РЕГУЛИРУЕМЫЙ ДЕБАЛАНСНЫЙ ВИБРАТОР | 1990 |
|
RU2009857C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ ВИБРАЦИОННЫХ КОЛЕБАНИЙ ДЛЯ ПРОВЕДЕНИЯ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ И ДЕБАЛАНСНЫЙ ВИБРОВОЗБУДИТЕЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2387488C1 |
| ОДНОВАЛЬНЫЙ ВИБРОВОЗБУДИТЕЛЬ НАПРАВЛЕННОГО ДЕЙСТВИЯ | 1991 |
|
RU2008101C1 |

